1 Abstrak— Makalah ini membahas permasalahan kontrol tracking pada sistem pendulum terbalik yang dikenal sebagai sistem nonlinear. Sistem pendulum terbalik direpresentasikan dengan model fuzzy Takagi-Sugeno. Desain kontrol yang digunakan berbasis pada performansi tracking H∞ untuk melemahkan tracking error sekecil mungkin serta pada saat yang bersamaan performansi tracking dilemahkan kurang dari level pelemahan yang telah ditentukan. Kestabilan dari keseluruhan sistem lup tertutup dicari dengan menggunakan fungsi Lyapunov. Semua kondisi yang diinginkan dirumuskan dalam bentuk Bilinear Matrix Inequality untuk memperoleh gain kontroler. Kontroler hasil desain diaplikasikan pada sistem pendulum terbalik. Hasil implementasi menunjukkan bahwa sistem pendulum terbalik mampu mengikuti siyal referensi yang diberikan serta performansi tracking yang diperoleh kurang dari level pelemahan yang diinginkan.
Kata Kunci— Model Fuzzy T-S, Bilinear Matrix Inequality, Performansi Tracking H∞, Sistem Pendulum Terbalik
I. PENDAHULUAN
Sistem Pendulum Terbalik (SPT) adalah sistem nonlinear dan tidak stabil, sehingga untuk mengontrolnya diperlukan teknik kontrol yang tidak mudah dibandingkan dengan teknik kontrol pada sistem yang linear dan stabil. Dinamika antara pendulum, kereta dan gaya gesek yang bekerja antara kereta dan rel menyebabkan SPT memiliki karakteristik nonlinear yang tinggi. Selain itu, panjang rel dan sinyal kontrol yang dapat diterapkan juga terbatas. SPT digunakan untuk mengilustrasikan banyak ide pada bidang kontrol sistem nonlinear. Sistem seperti ini dapat ditemukan pada peluncuran roket dan pengembangan robot humanoid. Dinamika sistem ini menjadi dasar makalah dalam hal keseimbangan dan menguji metode-metode kontrol.
Permasalahan yang diselesaikan dalam Makalah ini adalah
tracking. Ada beberapa metode yang pernah diusulkan untuk
menyelesaikan masalah tracking pada SPT. Di antaranya menggunakan kontroler Linear Quadratic Tracking (LQT). Metode regresi kuadratik digunakan untuk menentukan gain kontroler. Hasil yang dicapai terdapat kekurangan, yaitu adanya overshoot dan keterlambatan waktu antara respons posisi kereta terhadap sinyal referensi yang cukup lama [1]. Pada [2] digunakan kontroler fuzzy servo tipe integral dengan penentuan gain kontroler berdasarkan konsep PDC yang mampu mengurangi keterlambatan waktu pada LQT. Pada [3]
ditambahkan gain feedforward dan berhasil menghasilkan respons yang lebih cepat. Akan tetapi, servo tipe integral hanya cocok untuk sinyal referensi persegi, bukan sinyal sinus. Pada [4] digunakan kontroler tracking berbasis model fuzzy T-S dengan menggunakan model referensi. Aturan kontroler disusun dengan konsep PDC. Kontroler ini meghasilkan respons cukup baik. Overshoot semakin menurun dan keterlambatan waktu sangat kecil. Namun gain kontroler dihitung dengan menggunakan Linear Matrix Inequalities, sehingga memerlukan dua langkah penyelesaian serta diperlukan penurunan persamaan yang rumit.
Pada makalah ini telah dilakukan perancangan kontrol
tracking untuk menyelesaikan permasalahan tersebut. Teori
dasar yang digunakan seperti pada [4] dan gain kontroler dihitung dengan pendekatan BMI [5]. Hasil yang diperoleh dari penggabungan metode ini adalah memperoleh gain kontroler yang mampu meminimalkan kesalahan performansi
tracking. Selain itu, dengan melakukan perhitungan gain
kontroler dengan menggunakan pendekatan BMI dapat mempersingkat penurunan persamaan matematis.
Makalah ini terbagi menjadi beberapa bagian sebagai berikut. Pada bagian II dirumuskan permasalahan makalah. Pada bagian III akan didiskusikan disain kontrol tracking. Pada bagian IV akan dijelaskan mengenai hasil implementasi. Di akhir, bagian V memberikan kesimpulan dari makalah yang telah dilakukan.
II. PERUMUSAN MASALAH
2 2 4 2 2 2 4 2 2 2 4 2 2 2 2 4 4 3 4 3 2 1 sin sin ) sin ( cos sin ) sin ( cos ) sin ( x l J x f x g x x T F x l J l x x f x g x l x x T F a x x x x x x p c p c x (1)
SPT memiliki vektor state [x x x x ]T
4 3 2 1 x , dengan
x1 merupakan posisi kereta diukur dari titik tengah rel, x2
merupakan posisi sudut batang pendulum terhadap sumbu vertikal, x3 adalah kecepatan kereta, dan x4 adalah kecepatan
sudut batang pendulum. Persamaan state nonlinear SPT adalah seperti pada (1) dengan
Andri Ashfahani, Trihastuti Agustinah, Achmad Jazidie
Jurusan Teknik Elektro
Institut Teknologi Sepuluh Nopember
[email protected]
Kontrol Tracking pada Sistem Pendulum Terbalik
Berbasis Model Fuzzy Takagi-Sugeno
Proseding Seminar Tugas Akhir 2012 2 l m mc p) (
dan p c m m J l a 2 .Dan parameter sistem yang digunakan sebagai berikut [6]: mc = 1.12 kg; mp = 0.12 kg; l = 0.0167903 m; J = 0.0135735 kg.m2; fp = 0.000107 kg. m2/s.
Model matematika nonlinear SPT direpresentasikan dengan model fuzzy T-S. Fitur utama dari model fuzzy T-S adalah dapat digunakan untuk merepresentasikan dinamika nonlinear dengan model linear. Model ini dideskripsikan oleh aturan if-then yang menyatakan hubungan linear input-output lokal dari model nonlinear. Model sistem secara keseluruhan diperoleh dengan pencampuran (blending) fuzzy dari beberapa model linear yang telah diperoleh dari linearisasi [7]. Aturan ke-i dari model fuzzy memiliki betuk sebagai berikut:
Aturan model plant ke-i:
If z1(t) is Mi1 AND ... AND zj(t) is Mij Then x(t)Aix(t)Biu(t)w(t) ) ( ) ( ) (t Cixt Diut y p j r i1,2,3,, 1,2,3,, (2) dengan Mij adalah himpunan fuzzy, r adalah jumlah dari aturan plant, p adalah jumlah himpunan fuzzy dalam satu aturan,
n
t R
x() merupakan vektor state, u(t)Rm adalah vektor masukan, w(t)Rn merupakan gangguan, y(t)Rq adalah vektor keluaran, sedangkan Ai, Bi, dan Ci adalah matriks state, matriks input, dan matriks output. zi (t), ... , zp (t) merupakan premis yang dapat berupa fungsi dari variabel state, gangguan eksternal, dan/atau waktu.
Model plant secara keseluruhan dapat dirumuskan sebagai berikut: ) ( ) ( ) ( ) ( ) ( 1 t t u t z h t r i i i i w B x A x
(3)
r i i i i t u t z h t 1 ) ( ) ( ) ( ) ( Cx D y (4)
r i i i i z w z w z h 1 ( ) ) ( ) ( dan
p j ij j i z M z w 1 ) ( ) (dengan Mij(zj) merupakan nilai fungsi keanggotaan dari zj pada Mij. Diasumsikan bahwa 0 ) (z wi dan
1 ( )0 r i wi zuntuk semua nilai t. Dan untuk mempermudah perhitungan dipilih sebagai berikut [8]:
0 ) (z hi ;
r i1hi(z) 1 (5) r i1,2,3,,Model fuzzy T-S (3) merupakan persamaan umum nonlinear
time-varying yang telah digunakan untuk memodelkan
perilaku dari dinamika sistem nonlinear [7].
Cara untuk membantu SPT dapat mengikuti sinyal referensi yang diberikan adalah dengan menggunakan model referensi yang memiliki persamaan sebagai berikut [8]:
) ( ) ( ) (t r r t rrt r A x B x (6)
dengan ẋr(t)∈Rn merupakan state referensi, Ar(t)∈Rnxn dan
Br(t)∈Rnxn adalah matriks sistem dan matriks input yang
nilainya telah ditentukan, dan r(t)∈Rn adalah input referensi
yang nilainya terbatas.
Performansi tracking H∞ yang berkaitan dengan tracking
error dinyatakan dalam persamaan berikut [7]:
2 0 0 ) ( ~ ) ( ~ ) ( ) ( ) ( ) (
f f t T t r T r dt t t dt t t t t w w x x Q x x atau
tf tf T r T r t t t dt t t dt t 0 2 0 () ~ ) ( ~ ) ( ) ( ) ( ) ( x Qx x w w x (7)dengan w~(t)[w(t),r(t)]T, r(t) adalah input referensi, dan
w(t) adalah gangguan. tf adalah batas waktu kontrol, Q adalah
matriks pembobot definit positif, dan ρ merupakan level pelemahan yang ditentukan. Secara fisik, Persamaan (7) memiliki makna bahwa efek yang dihasilkan dari semua nilai
) ( ~ t
w pada tracking error [x(t)xr(t)] harus dilemahkan kurang dari atau sama dengan level yang ditentukan ρ2, dengan
kata lain L2-Gain dari w~ t() terhadap [x(t)xr(t)] harus kurang dari atau sama dengan nilai ρ.
Apabila nilai kondisi awal juga diperhitungkan, maka performansi tracking H∞ (7) dapat dimodifikasi menjadi
Persamaan berikut:
f f f t T T t T t r T r dt t t dt t t dt t t t t 0 2 0 0 ) ( ~ ) ( ~ ) 0 ( ~ ~ ) 0 ( ~ ) ( ~ ~ ) ( ~ ) ( ) ( ) ( ) ( w w x P x x Q x x x Q x x (8) dengan Q Q Q Q Q~Adapun P~ merupakan matriks pembobot definit positif yang sifatnya P ~~PT. Untuk memudahkan desain, dalam diasumsikan P~ memiliki nilai sebagai berikut [8]:
]) ([ ~ 22 P P Pdiag 11
3 PDC. Dari aturan plant pada Persamaan (2), dapat dibangun kontroler fuzzy sebagai berikut:
Aturan kontroler ke-i:
If z1 is Mi1 AND ... AND zj is Mij then u(t)ki[x(t)xr(t)]
p j
r
i1,2,3,, 1,2,3,, (9) dengan ki merupakan gain kontroler untuk aturan kontroler ke-i. Keluaran dari kontroler fuzzy secara keseluruhan dinyatakan
sebagai berikut:
r i i i r t t z h t u 1 )] ( ) ( [ ) ( ) ( k x x (10)dengan bobot hi(z) memiliki nilai yang sama dengan (5). Substitusi Persamaan (10) ke (3) diperoleh sistem pengaturan lup tertutup sebagai berikut:
r i r j i j i i j i j r t t t z h z h t 1 1 ) ( )] ( ) ( ) )[( ( ) ( ) ( A Bk x Bk x w x (11)Dengan menggabungkan lup tertutup model linear (11) dan model referensi (6), dapat diperoleh Augmented Fuzzy System (AFS) sebagai berikut:
r i r j i j ij t t t x h t x h t 1 1 2 2 )] ( ~ ~ ) ( ~ ~ ))[ ( ( )) ( ( ) ( ~x A x Ew (12) dengan r j i j i i ij 0 A k B k B A A~ ; r B 0 0 I E~ ) ( ) ( ) ( ~ t t t r x x x ; ) ( ) ( ) ( ~ t r t t w wIII. PERANCANGAN SISTEM KONTROL
Persamaan (12) merupakan Augmented Fuzzy System (AFS) dari model SPT dan model referensi. Dengan menggunakan sifat pada (5), persamaan ini dapat disederhanakan menjadi
) ( ~ ~ ) ( ~ ~ ) ( ~ t t t ijx Ew A x i j1 ,2, ,r (13)
Teorema 1 Agar diperoleh AFS yang terjamin kestabilannya serta memenuhi performansi tracking H∞, maka akan dibangun Pertidaksamaan (14) sebagai berikut [9]:
0 ) ( ~ ) ( ~ ) ( ~ ~ ) ( ~ )) ( ~ ( t t t 2 t t V x x TQx w Tw (14) ) ( ~ ~ ~ ) ( ~ ) ( ~ ~ ~ ) ( ~xt TPEw t wt TETPxt (15)
BMI dapat diturunkan dari (14). Langkah pertama adalah mensubstitusikan turunan fungsi Lyapunov (15) ke (14), sehingga diperoleh pertidaksamaan sebagai berikut:
0 ) ( ~() ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ) ( ~() ~ 2 t t t t T ij T ij T w x I P E E P Q A P P A w x (16)
Dari (16) secara eksplisit dapat diperoleh
0 22 21 12 11 S S S S (17) dengan P O N M S11 r r T B P 0 0 P B 0 0 I P 0 0 P S S 11 11 1 22 22 21 2 I 0 0 I S22 2 2
Nilai elemen matrik S11 adalah sebagai berikut:
Q k B P A P P B k P A M 11 11 11 i 11 i j T i T j T i Q k B P O N T 11 i j Q A P P A P T r r 22 22
Dengan menerapkan Schur Complement pada Pertidaksamaan (17), maka dapat diperoleh Pertidaksamaan (18) [10, 11]. 0 22 21 12 11 F F F F (18) dengan Q P P k B A P P k B A F 11 11 11 11 2 11 ( ) ( i i j) T j i i Q k B P F F 11 i j T 21 12 Q P B B P A P P A F 22 22 2 22 22 22 T r r r T r
P11, P22 dan kj dapat diselesaikan menggunakan PENBMI
[12] melalui YALMIP[13]. Apabila terdapat solusi definit positif untuk P~ , maka AFS (11) stabil. Dan permasalahan kontrol tracking dapat diformulasikan dalam permasalahan
Proseding Seminar Tugas Akhir 2012
4 optimisasi (19) untuk memperoleh performansi yang lebih baik
2 } , {min2 2 P P1 1 dengan syarat T 0 11 11 P P , 22 22 0 T P P , dan (18) (19)
Berdasarkan hasil analisis di atas, kontrol tracking fuzzy berbasis performansi tracking H∞ untuk SPT diringkas sebagai berikut:
Prosedur Desain:
1. Tentukan fungsi keanggotaan dan susun aturan plant fuzzy pada (2).
2. Berikan nilai tingkat pelemahan awal ρ2.
3. Selesaikan Pertidaksamaan F11 < 0 untuk memperoleh kj,
P11, dan P22.
4. Turunkan nilai ρ2 dan ulangi langkah 3-4 hingga solusi
definit positif untuk P~ tidak dapat ditemukan. 5. Susun kontroler fuzzy (10).
IV. HASIL IMPLEMENTASI
Model fuzzy T-S untuk SPT (1) dideskripsikan oleh dua aturan fuzzy sebagai berikut:
Aturan model plant ke-1: If x2(t) is M1 (sekitar 0 rad) then x(t)A1x(t)B1u(t)w(t) ) ( ) (t C1xt y
Aturan model plant ke-2:
If x2(t) is M2 (sekitar +0.3 rad) then x(t)A2x(t)B2u(t)w(t) ) ( ) (t C2xt y dengan 00791 . 0 0 03192 . 15 0 00013 . 0 0 25239 . 0 0 1 0 0 0 0 1 0 0 1 A dan 23799 . 1 82722 . 0 0 0 1 B 00789 . 0 0 26400 . 14 0 00013 . 0 0 20681 . 0 0 1 0 0 0 0 1 0 0 2 A dan 17909 . 1 82536 . 0 0 0 2 B ]) 1 1 1 1 ([ 2 1C diag C dan [0 0]T 2 1D D
dan w(t)[w1(t) w2(t) w3(t) w3(t)]. Fungsi keanggotaan untuk aturan plant ke-1 dan ke-2 adalah
0.12
] 5 . 0 exp[ )) ( ( 2 2 2 1 x t x M )) ( ( 1 )) ( ( 2 1 2 2 x t M x t M nilai w(t) yang digunakan seperti pada persamaan berikut:
lain yang 45 40 25 20 0 5 . 3 5 . 3 ) ( t t t w (20)
Nilai Ar dan Br dipilih sebagai berikut:
5 6 0 0 1 0 0 0 0 5 6 0 0 0 1 0 r A dan 1 . 20 0 3 . 9 0 r B dan r(t)=0.1sin(0.2πt).
Dalam makalah ini nilai Q ditentukan sebagai berikut: ]) 1 . 0 1 . 0 1 . 0 50 ([ 10 5diag Q
Melalui prosedur lima langkah desain pada bagian III, telah diperoleh nilai ρ yang terkecil yaitu 0.3 dan dihasilkan gain kontroler serta matriks P~ sebagai berikut:
] 880 -78.5 89.4436 -300.0 138.6292 [ 1 k ] -77.7795 93.2970 -299.9991 172.0568 [ 2 k 0.0258 0.0352 -0.0980 0.0883 -0.0352 -0.0486 0.1341 -0.1243 0.0980 0.1341 -0.3746 0.3353 -0.0883 -0.1243 0.3353 -0.3685 101 11 P 0.0001 0.0002 0.0003 0.0002 0.0002 0.0024 0.0005 -0.0041 0.0003 0.0005 -0.0025 0.0049 0.0002 0.0041 0.0049 0.0369 22 P
Respons posisi kereta hasil implementasi ditunjukkan pada Gambar 1. Dari gambar ini, dapat diamati bahwa kereta mampu mengikuti sinyal referensi pada waktu 3.05 s. Saat kondisi awal, posisi kereta menyimpang sejauh -0.046 m. Respons posisi kereta memiliki selisih amplitudo absolut maksimum terhadap sinyal referensi sebesar 0.0021 m. Apabila dibandingkan dengan nilai absolut maksimum sinyal referensi, nilai ini hanya 2.1% nya saja. Selain itu, respons posisi kereta juga memiliki waktu beda fase maksimum terhadap sinyal referensi sebesar 0.03 s. Nilai IAE pada implementasi ini adalah 0.2368. Secara keseluruhan dapat dilihat bahwa respons posisi kereta hasil implementasi dapat mengikuti sinyal referensi dengan baik.
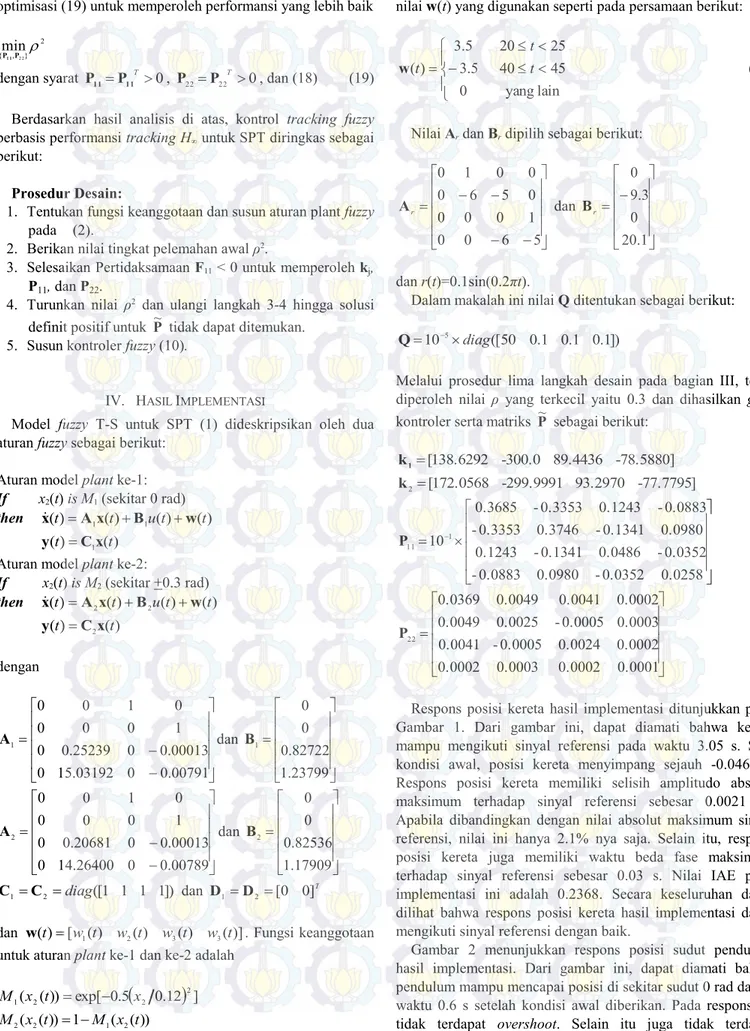
Gambar 2 menunjukkan respons posisi sudut pendulum hasil implementasi. Dari gambar ini, dapat diamati bahwa pendulum mampu mencapai posisi di sekitar sudut 0 rad dalam waktu 0.6 s setelah kondisi awal diberikan. Pada respons ini tidak terdapat overshoot. Selain itu juga tidak terdapat
5 rad. Dari penjelasan ini, maka dapat disimpulkan bahwa respons posisi sudut pendulum hasil implementasi memiliki performansi yang baik.
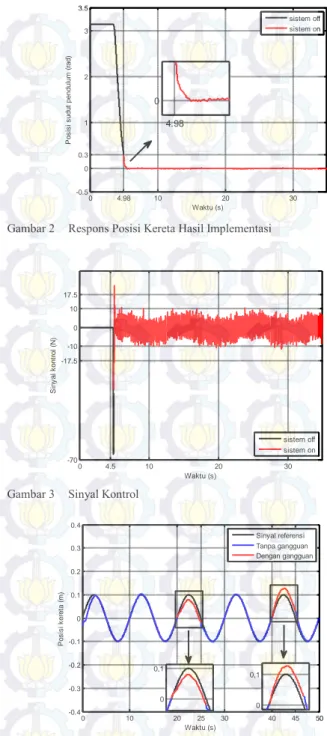
Sinyal kontrol yang digunakan pada implementasi dapat dilihat pada Gambar 3. Nilai minimum dan maksimum dari sinyal kontrol adalah -71 N dan 24 N. Sinyal kontrol ini berosilasi antara +10 N. Sinyal kontrol ini berubah-ubah sesuai dengan aturan fuzzy yang telah dibuat. Sinyal kontrol pada implementasi mengalami osilasi dengan cepat. Perubahan sinyal kontrol yang cepat ini dilakukan sebagai upaya untuk menstabilkan batang pendulum di sekitar 0 rad.
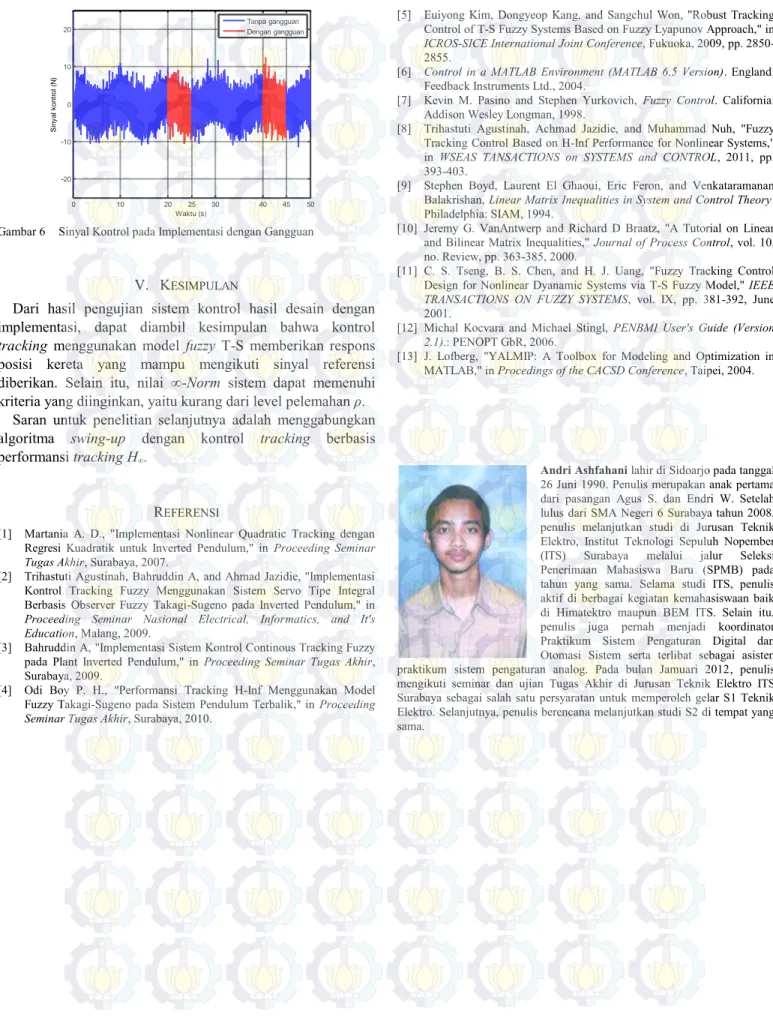
Respons posisi kereta dengan gangguan ditunjukkan pada Gambar 4. Pada gambar ini dapat diamati bahwa ketika SPT diberi gangguan 3.5 N, kereta bergeser ke arah kiri dari sinyal referensi. Hal ini menandakan bahwa sistem melawan gangguan yang diberikan. Selisih absolut maksimum antara sinyal referensi yang diberikan dengan posisi kereta adalah sebesar 0.0247 m yang terjadi pada saat t=42.5 s. Pada saat gangguan dihilangkan, SPT mampu kembali mengikuti sinyal referensi yang diberikan.
Gambar 5 menunjukkan respons posisi sudut pendulum dengan gangguan. Saat gangguan diberikan, yaitu di t=20 dan
t=40, posisi sudut pendulum mengalami penyimpangan sebesar
0.015 rad dan -0.012 rad. Antara 20<t<25 dan 40<t<45, respons ini memiliki osilasi yang sama dengan kondisi tanpa gangguan. Dan ketika gangguan dihilangkan, yaitu di t=20 dan
t=40, posisi sudut pendulum kembali mengalami
penyimpangan sebesar -0.012 rad dan 0.015 rad. Jadi dapat disimpulkan bahwa SPT tetap mampu menjaga kestabilan batang pendulum meskipun telah diberi gangguan.
Sinyal kontrol yang dihasilkan untuk implementasi dengan gangguan dapat dilihat pada Gambar 6. Tampak tidak terlalu banyak perbedaan bila dibandingkan dengan Gambar 3. Nilai ∞-Norm untuk respons tanpa gangguan dan dengan gangguan masing-masing 0.048 dan 0.05. Kedua nilai ini masih kurang dari nilai ρ yang dipilih yaitu 0.3, sehingga dapat disimpulkan bahwa perbandingan keluaran performansi terhadap gangguan akan selalu kurang dari level pelemahan yang ditentukan.
0 4.98 10 20 30 -0.1 0 0.1 Waktu (s) P o s is i k e re ta ( m ) Sinyal referensi Respons posisi pendulum
Gambar 1 Respons Posisi Kereta Hasil Implementasi
0 4.98 10 20 30 -0.5 0 1 2 3 0.3 Waktu (s) P o s is i s u d u t p e n d u lu m ( ra d ) sistem on
Gambar 2 Respons Posisi Kereta Hasil Implementasi
0 4.5 10 20 30 -70 -10 0 10 17.5 -17.5 Waktu (s) S in y a l k o n tr o l (N ) sistem off sistem on
Gambar 3 Sinyal Kontrol
0 10 20 25 30 40 45 50 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 Waktu (s) P o s is i k e re ta ( m ) Sinyal referensi Tanpa gangguan Dengan gangguan
Gambar 4 Respons Posisi Kereta Hasil Implementasi dengan Gangguan
0 10 20 25 30 40 45 50 -0.05 0 0.1 0.2 0.3 Waktu (s) P o s is i s u d u t p e n d u lu m ( ra d ) Tanpa beban Dengan beban
Gambar 5 Respons Posisi Sudut Hasil Implementasi dengan Gangguan
4.98 0 0.1 0 -0.1 20 25 0 40 45 0 0,1 0 0,1 0
Proseding Seminar Tugas Akhir 2012 6 0 10 20 25 30 40 45 50 -20 -10 0 10 20 Waktu (s) S in y a l k o n tr o l (N ) Tanpa gangguan Dengan gangguan
Gambar 6 Sinyal Kontrol pada Implementasi dengan Gangguan
V. KESIMPULAN
Dari hasil pengujian sistem kontrol hasil desain dengan implementasi, dapat diambil kesimpulan bahwa kontrol
tracking menggunakan model fuzzy T-S memberikan respons
posisi kereta yang mampu mengikuti sinyal referensi diberikan. Selain itu, nilai ∞-Norm sistem dapat memenuhi kriteria yang diinginkan, yaitu kurang dari level pelemahan ρ.
Saran untuk penelitian selanjutnya adalah menggabungkan algoritma swing-up dengan kontrol tracking berbasis performansi tracking H∞.
REFERENSI
[1] Martania A. D., "Implementasi Nonlinear Quadratic Tracking dengan Regresi Kuadratik untuk Inverted Pendulum," in Proceeding Seminar
Tugas Akhir, Surabaya, 2007.
[2] Trihastuti Agustinah, Bahruddin A, and Ahmad Jazidie, "Implementasi Kontrol Tracking Fuzzy Menggunakan Sistem Servo Tipe Integral Berbasis Observer Fuzzy Takagi-Sugeno pada Inverted Pendulum," in
Proceeding Seminar Nasional Electrical, Informatics, and It's Education, Malang, 2009.
[3] Bahruddin A, "Implementasi Sistem Kontrol Continous Tracking Fuzzy pada Plant Inverted Pendulum," in Proceeding Seminar Tugas Akhir, Surabaya, 2009.
[4] Odi Boy P. H., "Performansi Tracking H-Inf Menggunakan Model Fuzzy Takagi-Sugeno pada Sistem Pendulum Terbalik," in Proceeding
Seminar Tugas Akhir, Surabaya, 2010.
[5] Euiyong Kim, Dongyeop Kang, and Sangchul Won, "Robust Tracking Control of T-S Fuzzy Systems Based on Fuzzy Lyapunov Approach," in
ICROS-SICE International Joint Conference, Fukuoka, 2009, pp.
2850-2855.
[6] Control in a MATLAB Environment (MATLAB 6.5 Version). England: Feedback Instruments Ltd., 2004.
[7] Kevin M. Pasino and Stephen Yurkovich, Fuzzy Control. California: Addison Wesley Longman, 1998.
[8] Trihastuti Agustinah, Achmad Jazidie, and Muhammad Nuh, "Fuzzy Tracking Control Based on H-Inf Performance for Nonlinear Systems," in WSEAS TANSACTIONS on SYSTEMS and CONTROL, 2011, pp. 393-403.
[9] Stephen Boyd, Laurent El Ghaoui, Eric Feron, and Venkataramanan Balakrishan, Linear Matrix Inequalities in System and Control Theory. Philadelphia: SIAM, 1994.
[10] Jeremy G. VanAntwerp and Richard D Braatz, "A Tutorial on Linear and Bilinear Matrix Inequalities," Journal of Process Control, vol. 10, no. Review, pp. 363-385, 2000.
[11] C. S. Tseng, B. S. Chen, and H. J. Uang, "Fuzzy Tracking Control Design for Nonlinear Dyanamic Systems via T-S Fuzzy Model," IEEE
TRANSACTIONS ON FUZZY SYSTEMS, vol. IX, pp. 381-392, June
2001.
[12] Michal Kocvara and Michael Stingl, PENBMI User's Guide (Version
2.1).: PENOPT GbR, 2006.
[13] J. Lofberg, "YALMIP: A Toolbox for Modeling and Optimization in MATLAB," in Procedings of the CACSD Conference, Taipei, 2004.
Andri Ashfahani lahir di Sidoarjo pada tanggal
26 Juni 1990. Penulis merupakan anak pertama dari pasangan Agus S. dan Endri W. Setelah lulus dari SMA Negeri 6 Surabaya tahun 2008, penulis melanjutkan studi di Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember (ITS) Surabaya melalui jalur Seleksi Penerimaan Mahasiswa Baru (SPMB) pada tahun yang sama. Selama studi ITS, penulis aktif di berbagai kegiatan kemahasiswaan baik di Himatektro maupun BEM ITS. Selain itu, penulis juga pernah menjadi koordinator Praktikum Sistem Pengaturan Digital dan Otomasi Sistem serta terlibat sebagai asisten praktikum sistem pengaturan analog. Pada bulan Jamuari 2012, penulis mengikuti seminar dan ujian Tugas Akhir di Jurusan Teknik Elektro ITS Surabaya sebagai salah satu persyaratan untuk memperoleh gelar S1 Teknik Elektro. Selanjutnya, penulis berencana melanjutkan studi S2 di tempat yang sama.