Fakultas Ilmu Komputer
1142
Implementasi
Timing - Sync
Untuk Sensor Networks
Pada Jaringan Sensor Multihop
Budiman Eka Atmaja Timur1, Sabriansyah Rizqika Akbar2, Mochammad Hannats Hanafi
Ichsan3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Perkembangan Sensor Jaringan Wireless (WSN) sangat cepat, terutama untuk kehidupan manusia. Aplikasi WSN umumnya digunakan untuk kebutuhan pemantauan, pelacakan dan pengontrolan. Dalam beberapa aplikasi, WSN menggunakan banyak sensor dikerahkan secara acak di daerah tertentu untuk mendapatkan informasi yang luas. Namun, WSN juga memiliki kekurangan yang harus diselesaikan, yaitu permasalahan interferensi pada pengiriman data jika beberapa node WSN mengirim data secara bersamaan dengan menggunakan frekuensi yang sama maka tabrakan data akan terjadi. Salah satu metode untuk menyelesaikannya adalah menggunakan metode TDMA. Time Division Multiple Access (TDMA) adalah metode akses channel untuk jaringan bersama. Hal ini memungkinkan beberapa pengguna untuk berbagi kanal frekuensi yang sama dengan membagi sinyal dalam slot waktu yang berbeda. TDMA bekerja dengan membuat banyak node untuk dapat mengirimkan data secara bergantian, demi menghindari adanya interferensi pada pengiriman data. Dalam menerapkan metode TDMA, jam lokal dari seluruh node WSN harus melakukan sinkronisasi, tetapi ada masalah yang signifikan dalam sinkronisasi nirkabel, karena delay propagasi terlalu panjang, bahkan di area yang kecil. Karena masalah ini, tujuan penelitian ini adalah untuk menerapkan salah satu yang terbaik algoritma sinkronisasi waktu disebut Time-sync Protocol di Sensor Network (TPSN) untuk mendukung metode TDMA. Setelah dilaksanakan, ada beberapa masalah yang terjadi sebagai node tidak bisa lewat TDMA ke node lain, tidak dapat diandalkan, bekerja hanya beberapa node, dan skala kecil. Karena masalah ini, pengembang ingin menambahkan beberapa fitur apa yang bisa menutupi kekurangan ini dengan library rf24 arduino. Sistem ini telah diuji, dan Hasil penelitian menunjukkan hasil yang bagus dan lebih flexsibel untuk multi jaringan. Hasilnya menunjukkan kemampuan untuk mengirim pesan dengan melewati node lain dengan jadwal yang telah ditentukan.
Kata kunci: Time Synchronization, TPSN, TDMA, node WSN, interferensi, time slot
Abstract
result with more flexible for multiple network.The results show the ability to send messages by going through other nodes with a predetermined schedule.
Keywords: Time Synchronization, TPSN, TDMA, WSN node, interference, time slot
1. PENDAHULUAN
Perkembangan Wireless Sensor Network hampir diseluruh dunia mengalami perkembangan yang cukup pesat meliputi berbagai jenis dan spesifikasi dalam beberapa tahun terakhir ini. Penelitian tentang jaringan wireless banyak melakukan pengembangan WSN dari berbagai aspek, karena masih banyak keterbatasan pada jaringan Wireless (tanpa kabel) jika dibandingkan dengan wired (dengan kabel). Misalnya pengembangan sisi protokol akses yang meliputi Time Division Multiple Access (TDMA) yang membutuhkan metode sinkronisasi untuk komunikasinya.
Protokol TDMA sendiri akan membuat banyak node untuk dapat saling berhubungan dengan cara mengirimkan data antar node secara bergantian sesuai dengan jadwal pengiriman, untuk menghindari adanya tabrakan data atau interferensi data dari node lain. Dengan menggunakan protokol TDMA, modul perangkat WSN berkemungkinan untuk meningkatkan jumlah data yang dapat dikirimkan secara wireless dalam sebuah spektrum frekuensi yang sama (Sohraby & Minoli & Znati, 2007). Untuk dapat melakukan TDMA, terlebih dahulu Time Synchronization telah dilakukan untuk menyamakan clock waktu lokal dari semua perangkat WSN yang diletakkan secara terpisah.
Time Synchronization merupakan sebagai kunci dari berbagai aplikasi yang sering dipakai pada sistem komputasi distribusi. Namun banyak keterbatasan yang dimiliki oleh jaringan nirkabel sehingga lebih membutuhkan pengembangan daripada jaringan kabel atau jaringan wired. Berdasarkan berbagai aplikasi yang telah diterapkan dalam WSN, peningkatan presisi waktu beberapa milidetik dapat meningkatkan performa aplikasi tersebut secara signifikan (Simon et al, 2004). Tetapi untuk beberapa modul perangkat WSN seperti NRF24L01, tidak memiliki fungsi atau fitur otomatis dalam hal Time Synchronization tersebut. Oleh karena itu perlu dilakukan pembuatan secara manual kode program yang bisa mengatur mekanisme Time
Synchronization dalam TDMA WSN seperti yang telah dijelaskan.
Pembahasan penelitian tentang Time Synchronization sendiri telah banyak diuji dan dipublikasikan. Salah satunya adalah penelitian yang berjudul Post Facto Synchronization oleh Elson dan Etrin,, yang pada pendekatannya tersebut bahwa setiap clock node secara keseluruhan belum tersinkron, kemudian sebuah node yang berperan sebagai beacon secara periodik mengirimkan broadcast pesan kepada seluruh node sensor yang tercakup dalam jangkauan broadcast tersebut. Ketika node mendeteksi sebuah even, tiap node akan melakukan record terhadap waktu even tersebut dan membandingkannya dengan waktu lokal yang dimiliki setiap node. Algoritma bernama Reference Broadcast Synchronization atau RBS (Elson, 2002). Algoritma tersebut dijalankan dengan model topologi jaringan star dengan node beacon (node root) menjadi pusat dari topologi tersebut.
Kemudian node beacon/node root akan melakukan pengiriman waktu even dalam satuan waktu tertentu secara periodik kepada node yang dapat dijangkau. Kemudian setelah semua node menerima waktu even dari node beacon, maka dilakukan perhitungan untuk mengurangi jumlah delay untuk menambah ketepatannya, kemudian semua node yang telah penerima akan saling mencocokkan waktu even satu sama lain. Kelemahan dari algoritma adalah jika dilakukan pada jaringan WSN yang lebih luas atau dalam skala yang lebih besar, ada sebagian node yang tidak dapat melakukan pencocokan waktu karena keterbatasan node beacon yang tidak dapat mencangkup seluruh node. Beberapa penelitian terkait juga yang dilakukan oleh Yoon, et al (2010) menggunakan algoritmanya Tiny-Sync, dengan pengembangan algoritma pada RBS dengan tujuan untuk meningkatkan sistem perhitungan akurasi waktu dari pencocokan waktu RBS menjadi lebih akurat. Tetapi belum membahas tentang pengembangan untuk jaringan yang luas atau skala yang lebih besar.
Dalam penelitian sebelumnya tentang
“Implementasi Time Synchrpnization Pada
WSN Untuk Metode TDMA Menggunakan
berkomunikasi secara singlehop, dan cenderung terbatas pada komunikasi yang melibatkan cangkupan yang luas. Untuk mengatasi area jangkauan tersebut, jaringan nirkabel dapat menggunakan sistem komunikasi multihop. Dengan sistem multihop node akan mengirimkan informasi ke pusat kendali melalui node lain yang berada didekatnya. TPSN sendiri Berdasarkan pemaparan diatas, penulis ingin melanjutkan penelitian WSN dengan menggunakan algoritma TPSN untuk skala yang lebih besar dengan menggunakan topologi tree. Modul WSN NRF24L01 yang akan dipakai dalam implementasi algoritma TPSN.
2. LANDASAN PUSTAKA
2.1 Wireless Sensor Network
WSN singkatan dari Wireless sensor network (jaringan sensor nirkabel) adalah suatu jaringan nirkabel yang terdiri dari kumpulan
node sensor yang tersebar di suatu area tertentu (sensor field); serta sebuah base station, yang merupakan komponen penerima dan pengumpul semua informasi dari semua node untuk kemudian diolah menjadi informasi dan keperluan lainnya. Tiap node sensor memiliki kemampuan untuk mengumpulkan data lingkungan, mengolahnya menjadi data digital, dan berkomunikasi dengan node sensor lainnya menggunakan protokol tertentu.
Komponen suatu node pada WSN ini meliputi sensor, modul wireless atau transceiver, sumber daya, mikrokontroler, serta memori. Seluruh komponen yang dibutuhkan akan membentuk suatu jaringan yang dimana membentuk suatu fungsi sistem monitoring yang mampu bekerjasama mengumpulkan data yang didapat dari lapangan berupa karakteristik dari sensor yang digunakan dengan menggunakan media wireless. Dalam hal ini, karena WSN dapat digunakan untuk berbagai aplikasi maka penggunaan sensor dapat dipilih sesuai kebutuhan sistem.
Sistem WSN ini lebih jauh efisien dibandingkan dengan penggunaan kabel. Sistem ini memiliki fungsi untuk berbagai jenis aplikasi yang dimana WSN mampu memenuhi kebutuhan teknologi dalam berbagai bidang ilmu, seperti halnya pada bidang biologi, pertanian, perikanan dan lain sebagainya. (Kazem S,2007).
2.2 TDMA
TDMA atau Time Division Multiple Access
adalah teknologi untuk peralatan pengiriman data digital menggunakan teknik multipleksi pembagian waktu. TDMA bekerja dengan membagi frekuensi radio ke dalam slot waktu yang dapat mendukung pemakaian aliran kanal data secara bersama-sama. Transmisi dalam bentuk urutan frame, dimana tiap frame dibagi menjadi beberapa slot waktu, dan tiap slot waktu bersifat dedicated untuk sebuah transmitter tertentu. (Stallings, 2005). Setiap pengirim akan memiliki jadwal pengiriman yang berbeda dengan jadwal pengirim yang lain.
2.3 TPSN
TPSN (Time-Sync Protocol for Sensor Networks) adalah sebuah algoritma sinkronisasi waktu pada WSN, yang menggunakan pemodelan topologi tree. Dimana terdapat sebuah node sebagai root yang berada di pangkal tree, sinkronisasi waktu dimulai dari root tersebut. Dengan menggunakan aliran data yang disebut timestamp yang dikirim dari root ke hierarki dibawahnya, waktu disamakan melalui timestamp tersebut. TPSN memiliki keunggulan dibandingkan beberapa algoritma lain seperti skala yang lebih besar daripada algoritma RBS (Alson et al, 2001).
Terdapat dua fase pada algoritma TPSN, fase pertama adalah level discovery, fase ini digunakan saat pertama kali seluruh node memilih sebuah node untuk dijadikan sebagai node root. Berlanjut ke node level 1, level 2, dan seterusnya. Seluruh node akan mengingat posisinya masing-masing. Sistem ini dilakukan dengan pertama kali aliran data
oleh node level 2 kepada node level 1, begitu seterusnya sampai node level i yang paling ujung melakukan hal yang sama kepada node level i-1.
Gambar 2. 1 Mekanisme TPSN
𝑑 =(𝑇2−𝑇1)+(T4−𝑇3)2 (2.1)
2.4 NRF24L01
NRF24L01 adalah sebuah modul komunikasi jarak jauh yang memanfaatkan pita gelombang rf 2.4GHz ISM (Industrial Scientific and Medical). Modul ini menggunakan antarmuka SPI untuk berkomunikasi. Tegangan dari modul ini adalah 3,3 Volt DC.
Gambar 2.2 Modul wireless NRF24L01
2.5 Arduino Nano
Arduino Nano merupakan board mikrokontroler milik Arduino untuk digunakan dalam pemrograman pada penelitian ini. Arduino Nano cocok untuk digunakan sebagai node pada modul WSN, karena memiliki beberapa keunggulan, Nano didesain untuk pengguna yang membutuhkan fleksibilitas, harga terjangkau, dan ukuran yang kecil (Arduino, 2015). Dalam ukurannya yang kecil, tersedia pin 5 Volt dan 3,3 Volt sehingga bisa digunakan untuk menghidupkan peralatan-peralatan yang membutuhkan tegangan pada kedua nilai tersebut. Tampilan Arduino Nano seperti ditunjukkan gambar 2.3
Gambar 2.3 Arduino Nano
2.6 Arduino IDE
Arduino IDE adalah Software resmi Arduino yang digunakan untuk pemrograman semua Mikrokontroler Arduino. Dalam penelitian ini, penulis menggunakan Arduino IDE untuk membuat program dalam bahasa C dan debugging-nya, meng-upload program ke board Arduino, menambahkan library, dan mengamati aktivitas Arduino Nano menggunakan SerialMonitor.
3. PERANCANGAN DAN
IMPLEMENTASI
Pada tahap perancangan ini bertujuan untuk memenuhi semua kebutuhan fungsional yang dibutuhkan dalam penelitian ini. Pada tahap perancangan sistem dimulai dari perancangan perangkat keras yang meliputi tentang pembuatan skematik dan penyusunan secara embedded node, meliputi mikrokontroller Arduino Nano dan modul NRF24L01. Kemudian langkah selanjutnya diikuti dengan pemasangan perangkat lunak arduino dan beserta kebutuhan driver arduino tersebut. Setelah itu dimulai peracangan Flowchart pemrograman sistem TPSN.
Pada gambar 3.1 ditunjukkan bagaimana perancangan perangkat keras yang digunakan pada tiap - tiap node. Mikrokontroller digunakan sebagai alat untuk pemproses data yang sebelumnya telah dimasukkan program algoritma TPSN dan TDMA. Sumber tegangan mikrokontroler sendiri berasal dari USB yang tersambung dengan laptop. Fungsi lain dari USB itu sendiri sebagai media pengiriman data serial Arduino kemudian tersambung ke transceiver NRF24L01 untuk pengiriman data nirkabel. Disambungkan pula output led sebagai indikator pada arduino.
sebuah topologi tree.
Gambar 3. 1 Diagram blok node WSN
Gambar 3. 2 Topologi tree dalam TPSN
Mekanisme TPSN bekerja melalui dua tahap fase yang berurutan. Fase pertama adalah fase discovery, yaitu fase dimana node root sebagai pusat melakukan broadcast discovery kepada node disekitarnya untuk menentukan struktur topologi tree yang akan dibentuk, kemudian node yang menjadi child dari node root akan berubah menjadi parent dan bertanggung jawab terhadap node yang bergabung pada level selanjutnya. Sedangkan pada fase kedua adalah fase synchronization, yaitu fase yang dilakukan setelah terbentuknya topologi tree dimana semua node mencocokkan waktu lokal dengan node root/node parent.
Fase pertama ditunjukkan pada saat node root (level 0) dijalankan akan melakukan pengiriman paket discovery secara broadcast kepada node terdekatnya. Ketika node terdekatnya menerima paket broadcast discovery, node tersebut akan menjadi anggota level 1 pada topologi tree tersebut, setelah node tergabung dalam node level 1 maka node tersebut akan mengirimkan paket broadcast yang serupa untuk mencari anggota level berikutnya, sampai semua node tergabung dalam topologi..
Fase kedua ditunjukkan pada fase ini, akan dilakukan proses sinkronisasi clock waktu oleh semua node untuk disamakan waktu lokalnya dengan waktu yang dimiliki node Root. Fase sinkronisasi ini sama seperti fase discovery yang memulai prosesnya mulai dari level paling kecil kemudian menjangkau level selanjutnya. Pada prosesnya sebuah node akan mengirim paket synchronization dengan waktu T1 pada node root/node parent. Kamudian node root/node parent akan membalas permintaan paket synchronization dengan rincian T2 sebagai waktu penerimaan paket dan T3 sebagai waktu
pembalasan paket. Setelah node root/node parent mengirimkan balasannya, node awal yang mengirim paket synchronization pada awal tadi akan menerima balasan pada T4, kemudian akan melakukan perhitungan waktu, dan mencocokkan waktu oleh node tersebut.
3.1 Perancangan Sistem
Pada perancangan sistem merupakan tahap selanjutnya untuk mendapatkan gambaran yang jelas mengenai apa yang dikerjakan oleh peneliti. Perancangan sistem meliputi perancangan perangkat keras yang akan membahas tentang perangkat yang digunakan dan bagaimana dalam hubungannya dan perancangan perangkat lunak yang akan membahas tentang program bahasa C++ yang akan dijalankan dalam Arduino IDE.
3.2Perancangan Perangkat Keras
Dalam perancangan perangkat keras ini akan dijelaskan tentang bagaimana perangkat yang digunakan didalam sistem. Disini peneliti menggunakan Arduino Nano, NRF24L01, dan Laptop dalam penelitiannya. Arduino Nano sebagai mikrokontroler yang akan dihubungkan dengan NRF24L01 dengan sambungan pin.
Arduino Nano akan dihubungkan dengan notebook/ laptop dengan menggunakan kabel USB untuk monitoring arduino, upload program, sumber daya tegangan, dan komunikasi data. Secara keseluruhan hubungan perangkat keras ditunjukkan seperti gambar 3.3
Gambar 3. 3 Hubungan perangkat keras
Komunikasi data wireless yang dikirimkan antar NRF24L01 akan diproses oleh Arduino Nano, kemudian data yang diproses oleh Arduino Nano untuk diolah kemudian data tersebut diteruskan ke notebook/laptop sebagai sistem monitoring komunikasi data antar node.
3.3 Perancangan Perangkat Lunak
Arduino Nano. Dalam penambahan fitur NRF24L01 pada kode program, maka pada program akan ditambahkan library RF24 yang akan mengatur terbuka atau tertutupnya saluran, komunikasi data, pengalamatan ID node, ukuran payload, dan kanal frekuensi yang digunakan oleh tiap - tiap node dalam berkomunikasi.
Program yang digunakan terdiri dari dua jenis program, yaitu program root dan program Node. Program root bertugas melakukan broadcast dan akan membuat node yang menerima perintah root akan menjalankan dan melakukan tahapan discovery serta melakukan proses sinkronisasi secara langsung tanpa harus menunggu indikator tertentu. Sedangkan program node membuat node yang menjalankannya, harus menunggu hingga dikenali oleh node root atau parent-nya melalui Fase Discovery yang telah dilakukan oleh node root atau parent-nya dan telah tersinkronisasi dengan node root, untuk kemudian bisa menjalankan tahapan discovery dan sinkronisasi lagi terhadap node child-nya.
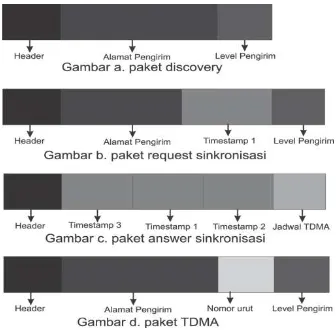
Gambar 3.4 Macam-macam Paket
Komunikasi node dengan node lainnya pada masing-masing tahapan atau level menggunakan beberapa paket yang berbeda dalam setiap
komunikasinya, paket dikenali melalui “header”
yang merupakan data array urutan pertama dari paket tersebut. Angka yang berawalan “0” untuk
paket discovery; angka yang berawalan “1”
untuk request paket sinkronisasi dan angka yang
berawalan “2” untuk paket sinkronisasi balasan; dan angka yang berawalan “3” sebagai paket
TDMA. Sehingga sebuah node dapat melakukan pengolahan data sesuai dengan perintah yang diterima dari header paket yang diterima oleh node. Secara keseluruhan, keempat paket ditunjukkan oleh gambar 3.4
4. PENGUJIAN SISTEM
4.1Pengujian Fungsional Sistem
Pengujian fungsional digunakan untuk mengetahui bahwa beberapa tahapan sistem dapat berjalan sesuai dengan tujuan, serta untuk menguji tingkat kehandalan sistem yang diuji. Beberapa tahapan dari keseluruhan sistem yang diamati dalam pengujian ini yaitu keberhasilan Fase Discovery, tingkat keberhasilan waktu tunggu acak pada Fase Sinkronisasi, dan keberhasilan pengiriman TDMA juga fungsi multihope, maka diperlukan skenario sebagai berikut:
1. Node Root (level 0) diaktifkan, kemudian langsung disusul node calon penghuni level 1. Node Root akan melakukan broadcast Paket Discovery selama 7 kali pada 7 detik awal.
2. Calon node level 1 menerima Paket Discovery dan menjadi child dari Node Root dan menjadi node level 1.
3. Setelah Node Root berhenti melakukan broadcast Paket Discovery, maka node calon node level 2 baru diaktifkan supaya tidak masuk ke level 1.
4. Node level 1 memasuki kondisi idle, menunggu selama waktu acak yang dihasilkan sendiri.
5. Node level 1, setelah terjadi timeout pada waktu idle-nya, akan langsung melakukan request sinkronisasi ke Root. Root membalas, kemudian Node level 1 akan mencocokkan waktu, dan mencatat jadwal TDMA yang juga disertakan bersama balasan dari Node Root.
6. Setelah tersinkronisasi dengan Root, maka node level 1 melakukan broadcast paket Discovery untuk menemukan calon node level 2.
7. Calon node level 2 menerima Paket Discovery, menjadi node level 2, menjadi child dari salah satu node level 1, kemudian melakukan hal yang sama seperti parent -nya.
8. Setelah waktu berjalan 1 menit, semua node akan mengirimkan Paket TDMA sesuai jadwal/time slot masing-masing.
Gambar 4.1 Tampilan Tahapan Discovery
Gambar 4.2 Tampilan Tahapan Sinkronisasi
Gambar 4.3 Tampilan Tahapan TDMA
4.2 Pengujian Waktu untuk Proses Discovery
Pada proses discovery digunakan untuk memberitahu kepada setiap node child melalui cara broadcast tentang alamat yang nanti akan dimintai oleh node child paket sinkronisasi yang dikirim ke parent-nya. Dalam pengujian ini bertujuan mengetahui proses waktu sebuah node untuk dapat masuk ke dalam hierarki, serta mengenali alamat parent-nya, dan mencatat levelnya sendiri. Saat pertama kali node aktif maka node akan melakukan perhitungan waktu discovery dengan cara melakukan pencetakan waktu saat node menerima paket discovery dari parent-nya. Paket discovery dibroadcast dari node root kemudian node yang menerima paket discovery tersebut akan berubah menjadi level 1, kemudian node level 1 akan melakukan discovery pada dan yang menerima paket discovery tersebut akan berubah menjadi level 2. Pada gambar 4.4 memberikan hasil percobaan 1, kedua node telah menerima paket broadcast discovery. Node COM4 menjadi level 1, dan node COM6 menjadi level 2 yang merupakan
child dari COM4. Pengujian dilakukan tiga kali, dan hasilnya dapat dilihat pada table 4.1
Gambar 4.4 Node-node setelah menerima paket
discovery
Tabel 4. 1 Waktu untuk discovery
Percobaan ke -
Kode Node
Level Node
Waktu Discovery
(detik)
1 A 1 0,259
B 2 8,572
2 A 1 0,378
B 2 7,199
3 A 1 0,710
B 2 18,293
4.5 Pengujian Waktu untuk Proses Sinkronisasi
Setelah proses discovery selesai, proses sinkronisasi baru dijalankan. Tiap - tiap node akan menunggu selama waktu acak yang telah diberikan guna mencegah/ memperkecil kemungkinan terjadinya interferensi dalam pengiriman data pada proses sinkronisasi dengan node lain ketika saat melakukan request ke parent. Saat proses sinkronisasi, tiap - tiap node akan mencocokkan dengan waktu lokalnya sendiri dengan cara meminta timestamp pada parent-nya. Percobaan pertama dapat dilihat pada gambar 4.5 menunjukkan proses penerimaan paket balasan sinkronisasi dari parent/root. Proses sinkronisasi waktu oleh kedua node. Proses untuk dilakukan percobaan itu dilakukan sebanyak tiga kali. Seperti yang ditunjukkan pada tabel 4.2
Gambar 4.5 Node-node setelah mendapatkan paket balasan sinkronisasi
Tabel 4. 2 Waktu untuk sinkronisasi
baan
4.6 Pengujian Fleksibilitas Topologi Jaringan
Pengujian fleksibilitas digunakan untuk menguji apakah program yang dibuat, tetap dapat digunakan jika struktur topologi jaringan diubah. Pengujian menggunakan 4/3 node dengan anggota tiap level berbeda dalam tiap skenario.
Bentuk pengujian fleksibilitas topologi menggunakan tiga skenario yang ditentukan oleh peneliti, yang masing-masing berbeda struktur node yang masuk kedalam hierarkinya. Skenario tersebut disusun sebagai berikut.
1. 3 node, susunan node: 1 Node Root, 1
Kemudian hasil pengujian ketiga skenario ditunjukkan pada tabel 4.3. dari tabel 4.3, dapat diketahui bahwa ketiga skenario pengujian berhasil membuktikan bahwa sistem yang dibuat fleksibel terhadap berbagai topologi yang diberikan.
Tabel 4. 3 Fleksibilitas Topologi
Pengujian
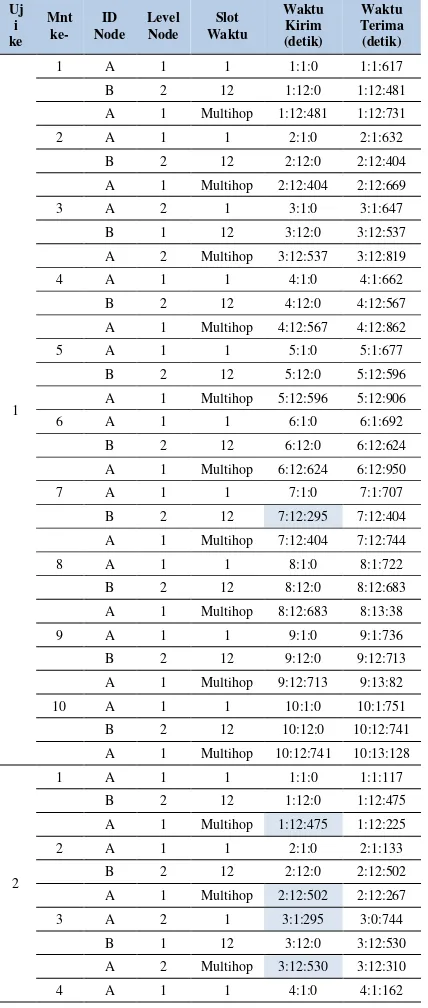
4.7 Pengujian Akurasi Waktu Multihop
Pengujian akurasi waktu Multihop digunakan untuk mengetahui tingkat akurasi sinkronisasi waktu pada pengiriman TDMA dari level 2 dilewatkan level 1 menuju level 0 (root). Waktu akan diukur ketika paket TDMA diterima pada sisi penerima dan akan dibandingkan dengan time slot, dan dengan waktu pengiriman.
Pengujian dilakukan menggunakan jarak kurang lebih 3 meter ditiap - tiap node.
Dari tabel 4.4, dapat diambil kesimpulan bahwa semua node berhasil melakukan pengiriman pada time slot yang telah dijadwalkan. Dan dapat melakukan pengiriman fungsi multihop dengan bantuan node yang berada pada level yang lebih kecil dari pengirimnya. Meskipun hasilnya sedikit terlambat dari jadwal beberapa puluh milidetik sampai beberapa ratus milidetik, namun pengiriman TDMA berhasil dilakukan tanpa adanya interferensi.
Tabel 4.4 Pengujian Akurasi Waktu
B 2 12 4:12:0 4:12:558
Dari pengujian yang telah dilakukan, didapatkan hasil analisis bahwa seluruh komponen dapat berjalan dengan baik. Node WSN dapat berkomunikasi dengan laptop baik untuk keperluan upload program, maupun untuk keperluan monitoring. Setelah pengujian pengukuran waktu dilakukan dan didapatkan hasilnya, maka dilakukan analisis bahwa rata-rata waktu dari tiga pengujian proses Discovery sesuai perhitungan sebagai berikut.
1. Waktu rata - rata pembentukan node pada level 1:
(0,259 + 0,378 + 0,710)/3 = 0,449 detik 2. Waktu rata-rata waktu pembentukan node
pada level 2:
(8,572 + 7,199 + 18,293)/3 = 11,355 detik
Hasil dari pengujian proses sinkronisasi, didapatkan hasil pengujian waktu rata-rata yang dibutuhkan untuk sebuah level dapat tersinkronisasi adalah sebagai berikut:
1. Waktu rata - rata sinkronisasi pada node level 1 :
- Dihitung mulai dari awal node aktif: (24,648 + 16,033 + 24,223)/3 = 21,634 detik
- Dihitung mulai dari awal percobaan: (28,329 + 17,107 + 26,546)/3 = 23,994 detik
2. Waktu rata - rata sinkronisasi pada node level 2:
- Dihitung mulai dari awal node aktif: (45,377 + 28,650 + 28,703)/3 = memberikan hasil analisis bahwa semua peralatan dapat bekerja dengan baik, dan sistem dapat berjalan sesuai dengan yang diharapkan mulai dari awal hingga akhir bahkan ketika struktur diubah. Dalam proses discovery didapatkan hasil sebuah hierarki tree dari hasil pengalamatan pada suatu node yang telah dicatat oleh child-nya, serta dapat melakukan penomoran sesuai dengan level urut mulai dari root hingga level yang paling bawah.
Hasil dari pengujian fleksibilitas program, didapatkan hasil yang menunjukan bukti bahwa program TPSN pada percobaan tersebut dapat beroperasi secara fleksibel dan program tidak ada masalah dalam melakukan proses sinkronisasi dan pengiriman TDMA. Program masih bisa digunakan selama ketersediaan time slot masih ada. Dalam pengaturannya node level 1 mendapatkan time slot mulai dari angka 1 ditambah 1. Sedangkan time slotnode pada level 2 akan mendapatkan dari jadwal yang sudah ditentukan mulai dari time slot yang dia miliki ditambah 10, dan berkelipatan 1.
Untuk beberapa kasus seperti pengujian pada Tabel 4.4, dapat diambil kesimpulan bahwa semua node berhasil mengirim pada time slot yang telah dijadwalkan dan berhasil melakukan multihop dari level 2 menuju level 1 kemudian diteruskan ke root. Meskipun setelah dikurangi delay propagasi, dan hasilnya sedikit terlambat dari jadwal beberapa puluh milidetik bahkan sampai beberapa ratus milidetik untuk jarak diameter kurang lebih 2 meter, namun pengiriman TDMA berhasil dilakukan tanpa adanya interferensi. Mulai dari menit ke 7 pada percobaan pertama mulai adanya delay pada pengiriman node dengan jadwal 12 tetapi pada menit selanjutnya dapat kembali seperti semula. Tetapi beda dengan multihop pada percobaan ke 2, disana masih terdapat delay pada angka yang ditampilkan pada tabel 4.4 sedangkan root menerima TDMA dengan waktu yang lebih cepat daripada node level 1 yang mengirim TDMA dari node level 2 (multihop).
5. KESIMPULAN
1.
Implementasi metode sinkronisasi waktu TPSN pada modul arduino dan NRF24L01 dimana pengujian fungsionalitas menunjukkan sistem yang telah dibuat sudah memenuhi persyaratan kebutuhan.2.
Metode pengacakan waktu dan alamat berhasil mendukung sebagian besar skenario TPSN dan TDMA, meskipun ada beberapa kegagalan kecil pada sejumlah skenario yang menjadi kelemahan seperti interverensi, namun dapat dikurangi dengan jumlah byte acak yang ditambah, meskipun dengan resiko waktu eksekusi yang dapat berjalan lebih lama.3.
Pengiriman TDMA dan multihop berjalan sesuai timeslot yang direncakanan, dengan akurasi waktu diukur dari waktu pengiriman dan waktu penerimaan TDMA4.
Library RF24 lebih komplek dari Mirf yang digunakan pada penelitian sebelumnya, RF24 bisa melakukan skenario transmisi data, penerimaan data, pengaturan channel, pengalamatan berdasarkan ID, dan konfigurasi ukuran payload untuk mendukung data array yang digunakan pada sistem jauh lebih dalam kompleksitas buka tutup saluran radio.DAFTAR PUSTAKA
Arduino, 2016. Product Arduino. [online]
Tersedia di:
<http://www.arduino.cc/en/Main/Produ cts> [Diakses 20 September 2016]
Chantrell, N., 2013. Experimenting with the nRF24L01+ 2.4GHz radios. [Online]
Tersedia di:
https://nathan.chantrell.net/20130810/e xperimenting-with-the-nrf24l01-2-4ghz-radios/ [Diakses pada Maret 2016].
Chu, Y. et al., 2015. Application of reinforcement learning to medium access control for wireless sensor networks. Engineering Applications of Artificial Intelligence, pp. 23-32.
Elson, J., and Estrin, D. 2001. Time synchronization for wireless sensor networks. San Francisco, CA.
Elson, J., Girod, L., and Estrin, D. 2002. Fine-grained network time synchronization using reference broadcasts. In UCLA Technical Report 020008.
Faludi, Robert. 2010. Building Wireless Sensor Networks.
Kumar, S. & Chauhan, S., 2011. A Survey on Scheduling Algorithms for Wireless. International Journal of Computer Applications.
Kurose, J., and Ross, K. 2012. Computer Networking: A Top-Down Approach Sixth Edition. Boston, Addison-Wesley.
Mathivanan, N. 2007. PC-Based Instrumentation: Concept and Practice. New Delhi, PHI.
RF24, 2016. Librari RF24. [online] Tersedia di:
<https://arduino- info.wikispaces.com/nRF24L01-RF24-Examples> [Diakses 20 Desember 2016]
Sohraby, dkk. 2007. Wireless Sensor Networks: Technology, Protocols, and Applications. Canada. Wiley.
Stallings, William. 2005. Wireless Communication and Networks Second Edition. Pearson Education, Inc.