BAB 2
LANDASAN TEORI
2.1 Teori-teori Umum 2.1.1 Matematika
Pengertian terhadap konsep diferensial atau turunan dan integral diperlukan untuk memahami persamaan mekanika. Bagian lain dari matematika yang penting dihubungkan dengan kinematika adalah perkalian matriks dan vektor.
Vektor
M enurut Anton Howard [Aljabar Linear Elementer, 5th ed. Jakarta : Penerbit Erlangga, (1997), page 112], “Vektor adalah besaran yang memiliki arah, umumnya ditunjukkan dengan gambar anak panah.” Di dalam sistem koordinat 2 dimensi atau 3 dimensi, suatu vektor bisa dipecah ke dalam komponen yang searah dengan sumbu-sumbu koordinat. M isalnya: V (pada gambar 2.1) adalah sebuah vektor yang dipecah terhadap sumbu x an sumbu y, masing-masing sebesar Vx dan Vy. Vx dan Vy sendiri, masing-masing adalah vektor.
Anton et al., mengatakan, “Vektor cross product atau hasil kali silang adalah salah satu operasi vektor yang mengkalikan vektor dengan vektor dan menghasilkan vektor baru, operasi ini disimbolkan dengan tanda × atau cross.” Hasil kali silang atau cross product antara vektor a dan vektor b, yang menghasilkan vektor c, disimbolkan dengan c = a × b. besar vektor c adalah:
θ sin . .b a c= (2-1)
Gambar 2.1 Vx dan Vy adalah komponen Vektor V.
Gambar 2.2 c = a × b.
dimana θ adalah sudut antara a dan b yang kurang atau sama dengan 180°. Sedangkan arah dari c adalah tegak lurus terhadap bidang yang dibentuk oleh vektor a dan b, dengan arah yang ditentukan oleh aturan tangan kanan.
Berikut adalah tentang cross product, diambil dari Anton Howard, et al : Jika u = (u1,u2,u3) dan v = (v1,v2,v3) adalah vektor di ruang-3, maka hasil kali
silang u × v adalah vektor yang didefinisikan oleh
su×v=
(
u2v3−u3v2,u3v1 −u1v3,u1v2 −u2v1)
(2-2)Penjelasan mengenai diferensial, integral, matriks dan vektor dapat dipelajari dari buku-buku matematika umum.
Matriks
Berdasarkan (Hadley, 1992, p51-52), berikut ini adalah bagian-bagian yang penting tentang matriks:
M atriks didefinisikan sebagai susunan peregi panjang dari bilangan-bilangan yang diatur dalam baris dan kolom. M atriks dirulis sebagai berikut:
mn m m n n a a a a a a a a a L M L M M L L 2 1 2 22 21 1 12 11 (2-3)
Susunan di atas disebut sebuah matriks m kali n (ditulis dengan m x n) karena memiliki m baris dan n kolom. Sebagai aturan, kurung siku [ ], kurung biasa ( ), atau bentuk || || digunakan sebagai batasan dari bilangan-bilangan yang terdapat dalam suatu matriks.
Karena matriks pada umumnya merupakan susunan bilangan-bilangan yang berdemensi dua, maka diperlukan dua subskrip untuk menyatakan setiap elemennya. Dengan perjanjian, subskrip pertama berkaitan dengan baris, dan yang kedua dengan kolom
Operasi Matriks
Perkalian matriks dengan skalar adala bila diberikan sebuah matriks A dan sebuah skalar λ, hasil perkalian λ, dan A, ditulis λA, didefinisikan sebagai
= mn m n n a a a a a a A λ λ λ λ λ λ λ L M L M L L 1 2 21 1 11 (2-4)
Perkalian antar matriks adalah bila diberikan matriks m x n A dan matriks n x rB, maka hasil kali AB didefinisikan sebagai matriks m x r C, yang elemen-elemennya dihutung dari elemen-elemen dari A,B menurut
∑
= = n k kj ik ij a b c 1 , i = 1, ..., m, j = 1, ..., r. (2-5)dalam hasil kali matriks AB, A disebut sebagai pengali depan dan B pengali belakang. Hasil kali AB ditentukan hanya kalau jumlah kolom di A sama dengan jumlah baris d B. Perkalian matriks tidak memenuhi semua aturan perkalian dari bilangan-bilangan biasa salah satu perbedaan yang paling penting adalah kenyataan bahwa pada umumnya perkalian matriks adalah tidak komutatif, yaitu: AB dan BA tidak sama.
Tranpose Matriks
Berdasarkan (Hadley,1992,p65), tranpose dari matriks A = ||aij|| adalah matriks
yang dibentuk dari A dengan mempertukarkan baris-baris dan kolom-kolom sehingga baris i dari matriks A menjadi kolom i dari matriks transpose dinotasikan dengan AT.
ji T a
A = jika A= aij (2-6)
Penjelasan mengenai vektor, matriks dan trigonometri dapat dipelajari dari buku-buku matematika umum.
2.2 Teori-teori Khusus 2.2.1 Kinematika
Fu, K. S., R. C. Gonzales,C. S. G. Lee (1987). Robotics: Control,
Sensing, Vision, and Intelligence, 1st ed. Singapore : Penerbit M cGraw-Hill,
tanpa memperhatikan penyebabnya salah satunya adalah gaya yang mempengaruhinya, berhubungan dengan geometri dari gerakan. Dalam mengkaji kinematik perlu dilakukan deskripsi analisis dari penempatan posisi secara spasial dari lengan robot sebagai sebuah fungsi waktu. Secara garis besar, kinematika ini membahas tentang hubungan antara derajat kebebasan masing-masing joint, posisi, serta orientasi dari end effector pada lengan robot.”
Terdapat dua topik pembahasan mendasar pada kinematik lengan robot. Yang pertama adalah Direct (atau forward) Kinematics. Dan yang kedua adalah
Inverse Kinematics (atau arm solution). Inverse kinematics akan lebih sering
digunakan dalam pembuatan lengan robot karena pada penggunaan robot secara real, pengaturan joint-joint tidak lagi diutamakan. Yang menjadi fokus utama adalah bagaimana end effector mencapai posisi objek dengan baik berdasarkan peletakan referensi koordinat frame yang sudah ditentukan.
Denavit dan Hartenberg [1995] memperkenalkan pendekatan sistematik dan pendekatan umum menggunakan matriks algebra untuk menyatakan dan menunjukkan geometri spasial pada link pada lengan robot dengan frame yang
fix. M etode ini menggunakan matriks homogeneous transformation 4 x 4 untuk menyatakan hubungan spasial antara dua link yang berhubungan serta menyederhanakan masalah direct kinematics pada matriks transformasi
homogeneous yang berhubungan dengan penempatan spasial dari frame
koordinat lengan terhadap frame koordinat referensi. M atriks transformasi
homogeneous juga berguna untuk mencari turunan dari persamaan dinamik
Secara umum, masalah dalam inverse kinematik dapat diselesaikan dengan beberapa tehnik. M etode yang paling sering digunakan adalah matrix
algebraic, pendekatan numerik, dan pendekatan geometri.
Kinematika sehubungan dengan robotika, yang pertama perlu mendapatkan perhatian adalah matriks rotasi dan matrik transformasi. M atriks rotasi adalah matriks yang memetakan sebuah vektor atau posisi pada satu sistem koordinat ke sistem koordinat yang lain dalam gerakan rotasi. M atriks transformasi adalah matriks yang memetakan sebuah vektor atau posisi pada satu sistem koordinat ke sistem koordinat yang lain dengan memperhatikan rotasi, translasi, penskalaan dan perspektif / sudut pandang.
Berikutnya juga perlu diperhatikan adalah konvensi Denavit-Hartenberg, dikutip dari Fu, K. S. et al., page 37:
θi adalah sudut pandang pada joint dari sumbu xi − 1 dengan sumbu zi – 1
sebagai porosnya (perputarannya menggunakan aturan tangan kanan). di adalah jarak dari pusat koordinat kerangka/sumbu koordinat ke-(i – 1) ke
perpotongan sumbu zi – 1 dengan sumbu zi – 1 dengan sumbu xi
sepanjang sumbu zi – 1.
ai adalah jarak/panjang perpotongan sumbu zi – 1 dengan sumbu xi ke pusat
kerangka/sumbu koordinat ke-i sepanjang sumbu xi (atau jarak terpendek
antara sumbu zi – 1dan sumbu zi).
αi (alpha) adalah sumbu dari sumbu zi –1 ke sumbu zi dengan poros sumbu
Dikutip dari Walker, M . W., D. E. Orin (1982). Efficient Dynamic Computer Simulation Of Robotic M echanisms. Journal Of Dynamic System,
Measurement, and control 104, page 142:
“Dalam menetapkan koordinat setiap link, konvensi Denavit-Hartenberg digunakan. Konvensi ini menjelaskan empat parameter, a1, d1, α1, θ1, joint i dapat
dirotasikan atau ditranslasikan. Jika joint itu berotasi, a1, d1, α1, konstan dan θ1,
merupakan variabel. Jika joint itu bertranslasi, a1, α1, θ1 konstan dan d1
merupakan variabel.”
Dengan memperhatikan konversi Denavit-Hartenberg, matriks transformasi Denavit-Hartenberg untuk sistem koordinat yang berdekatan i – 1Ai,
yaitu sistem koordinat i dan sistem koordinat i – 1, joint rotasi:
α θ , , , , 1 x a x z d z i i− A =T T T T − − = 1 0 0 0 0 cos sin 0 0 sin cos 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 0 0 1 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 i i i i i i i i i i a d α α α α θ θ θ θ − − = 1 0 0 0 cos sin 0 sin cos sin cos cos sin cos sin sin sin cos cos i i i i i i i i i i i i i i i i i d a a α α θ θ α θ α θ θ θ α θ α θ (2-7)
Kinematics pada perhitungan pergerakan lengan robot sangat diperlukan
selain dilihat dari sisi dinamiknya karena kinematics merupakan dasar pembuatan
controller / drive unit dari robot. Dengan mempelajari kinematics maka
didapatkan referensi sudut, posisi, dan orientasi yang sesuai. Hal yang penting lainnya adalah juga pengaruhnya terhadap akurasi dan ketepatan peletakkan end
effector pada robot serta orientasinya. Dengan menggerakkan masing-masing
joint pada sudut tertentu maka akan didapatkan end effector dengan posisi dan
orientasi tertentu.
Pada direct kinematics, secara umum yang akan dilakukan adalah menggerakkan sudut pada joint space dimana akan menghasilkan posisi dan orientasi end effector pada Cartesian space. Sedangkan untuk inverse kinematics, dari posisi yang sudah ditentukan berupa Cartesian space, akan menghasilkan output berupa pergerakan sudut joint-joint pada lengan robot.
Pada bagian awal disebutkan bahwa spatial information serta penggambaran matematis berupa matriks homogeneous 4 x 4 sangat penting dalam kinematiks. Spatial information adalah informasi yang akan dihadapi oleh lengan robot berupa posisi dan orientasi awal, posisi dan orientasi tujuan, serta informasi dari perangkat tambahan seperti camera yang memantau keadaan sekitar serta aktifitas pergerakan lengan robot. Informasi-informasi inilah yang akan dihadapi dalam perancangan sebuah sistem lengan robot, dipandang dari segi kinematics.
Coordinate frame digunakan untuk menggambarkan posisi relatif dan
orientasi dari objek. Sebuah titik pada workspace dapat digambarkan dalam sebuah frame atau lebih, pada frame 3 dimensi {x, y, z} terdapat titik origin dan arah sumbu dimana tiap bagian link dari robot masing-masing memiliki frame. Perubahan posisi dan orientasi dari sebuah frame terhadap frame lainnya merupakan sebuah pergerakan robot.
Pergerakan robot merupakan sebuah gabungan pergerakan tiap joint yang mempengaruhinya. Bila gerakan beberapa joint tersebut dipandang dari sisi end
effector saja, maka berdasarkan informasi spasial pergerakan yang dilakukan
dalam kenyataannya adalah transformasi, dimana transformasi yang dilakukan pada umumnya adalah gabungan gerak translasi dan rotasi. Contoh pada gambar 2.3 memberikan gambaran jelas perbedaan antara posisi dan orientasi, yang digambarkan dalam bentuk 2 dimensi.
Gambar 2.3 Posisi dan Orientasi
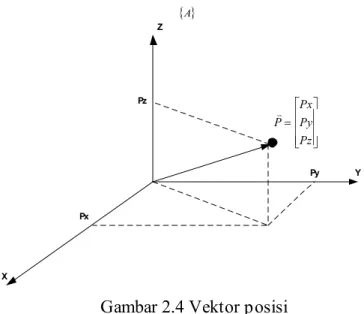
Posisi memberikan informasi tentang letak dari objek, karena objek tidak berupa sebuah titik maka penentuan posisi dilakukan berdasarkan centre of mass
dari objek. Posisi sebuah objek terhadap objek lainnya bila digambarkan dalam bentuk 3 dimensi maka diwakilkan dengan vektor posisi matriks 3 x 1.
Y X Z Py Px Pz = Pz Py Px Pv { }A
Gambar 2.4 Vektor posisi
Orientasi adalah informasi tentang arah dari objek. Orientasi satu objek terhadap objek lainnya dapat digambarkan dengan matriks rotasi 3 x 3. Pada pergerakan rotasi, sumbu putar dipecah menjadi 3 bagian, yaitu berputar terhadap sumbu z, sumbu x, dan sumbu y. Dalam penerapannya, objek berputar berorientasi pada ketiga sumbu koordinat tiga dimensi tersebut.
Rotasi terhadap sumbu Z − = 1 0 0 0 cos sin 0 sin cos , θ θ θ θ θ Z R
Gambar 2.5 Rotasi terhadap sumbu Z
Rotasi terhadap sumbu X
− = α α α α α cos sin 0 sin cos 0 0 0 1 , X R
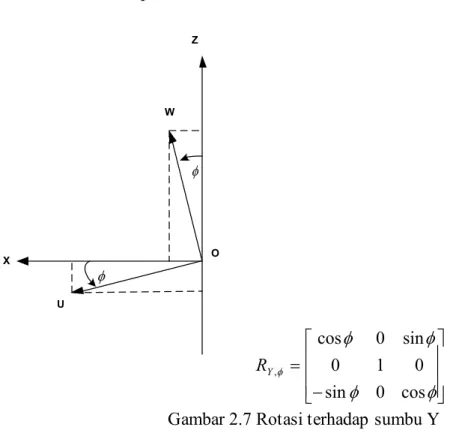
Rotasi terhadap sumbu Y O W X U Z φ φ − = φ φ φ φ φ cos 0 sin 0 1 0 sin 0 cos , Y R
Gambar 2.7 Rotasi terhadap sumbu Y
Pada kinematika lengan robot khususnya yang dibahas dalam skripsi ini banyak membahas masalah transformasi, dimana terdiri atas pergerakan translasi dan rotasi, kedua pergerakan ini dituangkan dalam bentuk matriks yang terpisah yaitu matriks 3x1 untuk pergerakan translasi dan matriks 3x3 untuk pergerakan rotasi. Untuk mempermudah dalam perhitungan transformasi, kedua matriks tersebut perlu digabungkan, maka digunakan matriks transformasi homogenus
4x4 (2-8). matriks ini terdiri dari posisi, rotasi, perspective dan scale. Dalam perhitungan kinematika yang dibahas dalam skripsi ini komponen perspective
dan scale diabaikan, karena hanya menggunakan satu sudut pandang dengan
Homogenous Transformation (Fu, K. S. et al., page 28) − − = − − = Scale e Perspectiv position rotation S f P R T x x x x | | | | | | 1 1 3 1 1 3 3 3 (2-8)
Pre Multiply adalah cara menghitung perkalian matriks untuk mencari
posisi dan orientasi dari object dipandang dari stationary frame atau base frame, maksudnya adalah posisi dan orientasi dari benda itu berdasarkan pada basenya, sehingga jika terjadi rotasi maka perputaran yang terjadi adalah perputaran dengan pusat perputaran pada koordinat 0,0,0. Post Multiply adalah cara menghitung pekalian matriks untuk mencari posisi dan orientasi dari object dipandang terhadap own frame, maksudnya posisi dan orientasi benda tersebut berdasarkan pada dirinya sendiri, jika benda bukan merupakan titik maka di lihat dari center of mass benda tersebut, sehingga jika terjadi rotasi maka perputaran yang terjadi adalah perputaran dengan pusat perputaran center of mass dari benda itu sendiri.
2.2.2 Invers Kinematika
Kinematik adalah proses menghitung posisi pada space dari end-effector
berdasarkan sudut-sudut dari kesemua joint. Cara tersebut disebut juga direct
kinematics, dan perhitungannya lebih mudah karena hanya menghasilkan satu
solusi. Inverse kinematics adalah sebaliknya, diberikan posisi end-effector, dan yang akan dicari adalah berapa besar sudut yang harus diubah untuk tiap jointnya untuk dapat mencapai posisi end-effector tersebut. Hal ini akan menjadi lebih
sulit., dan ada banyak cara atau banyak solusi untuk mencari besar sudut tersebut.
Proses ini sangat berguna dalam robotika. Dengan sebuah lengan robot yang sederhana sekalipun, jika dari sebuah simulasi software kita mendapat posisi relatif objek terhadap base, maka dengan perhitungan invers kinematics
dapat diketahui pergerakan sudut masing-masing joint secara langsung untuk dapat mencapainya.
Objek yang akan dimanipulasi biasanya digambarkan dalam ruang koordinat 3 dimensi berupa posisi (world coordinate), sedangkan pada lengan robot, koordinat untuk tiap joint digambarkan dalam ruang koordinat joint -variable berupa sudut-sudut. Penetapan posisi dan orientasi end-effector pada lengan robot enam axis dipandang dari base frame disimbolkan dengan 0T6
(2-9). Dengan invers kinematik dapat menentukan sudut-sudut dari tiap joint dari posisi end-effector yang dapat diletakkan sesuai dengan keinginan pemrogram robot. 6 5 5 4 4 3 3 2 2 1 1 0 6 0 6 0 . . . . . 1 0 0 0 A A A A A A p a s n p a s n p a s n A T z z z z y y y y x x x x = = = (2-9)
Dalam banyak kasus, sangat memungkinkan sebuah struktur lengan robot untuk tidak dapat mencapai ke objek tujuan atau targetnya. M isalkan dalam kehidupan sehari-hari, manusia tidak dapat menyentuh siku dengan jari-jarinya, dan manusia tidak mampu meraih daun di pucuk sebuah pohon yang tinggi dari
bawah. Hal ini juga terjadi pada batasan gerakan lengan robot atau workspace. Target yang berada di luar range lengan robot tentu tidak dapat dicapai oleh end
effector. Bila lengan robot dipaksa untuk mencapai target yang tidak mungkin
diraihnya, maka akan berakibat hang atau menjadi unstable.
Gambar 2.8 Satu solusi Sumber : http://freespace.virgin.net
Jika terdapat dua solusi, cara ini akan mencari gerakan terdekat dari struktur lengan sebelumnya.
Gambar 2.9 Dua solusi Sumber : http://freespace.virgin.net
Bila ada lebih dari dua joint, akan memungkinkan menghasilkan banyak solusi untuk mencapai target. Tetapi dari sekian banyak solusi yang dihasilkan, hanya ada beberapa solusi yang terbaik untuk dilakukan. Bila struktur lengan seperti pada gambar 2.10, untuk mencapai posisi target lainnya akan ada banyak cara. Tetapi akan ada beberapa cara yang baik, efisien dan cukup cepat untuk dilakukan. Tidak ada solusi yang pasti dan optimal untuk keadaan struktur lengan yang berbeda.
Gambar 2.10 Banyak solusi Sumber : http://freespace.virgin.net
Pendekatan Geometris
Berdasarkan Fu, Gonzalez dan Lee (1987, p60-69), pada cara geometris, solusi dicari dengan menerapkan ilmu-ilmu geometri dan hukum-hukum trigonometri. Sebagai contoh:
i
θ
Gambar 2.11 sudut joint 1
2 2 2 sin Pz Py Px Pz i + + = θ (2-10) 2 2 2 2 2 cos Pz Py Px Py Px i + + + = θ (2-11) = − i i i θ θ θ cos sin tan 1 (2-12) Pendekatan Algebraic
Berdasarkan (Craig, 1989, p131-136), pada cara algebraic, solusi dicari dengan cara melakukan penurunan persamaan-persamaan kinematik dari matriks transformasi
homogeneous sehingga didapatkan sudut-sudut joint yang dibutuhkan.
Sebagai contoh, lokasi dan frame {3} relative terhadap base frame {0} adalah:
0T 3 = 0T11T22T3 (2-13) dimana: 0 T1 = 0A1 1 T2 = 1A2 2T 3 = 2A3
Untuk mencari besarnya persamaan sudut pada setiap joint, bisa dilakukan dengan memindahkan elemen dari bagian kanan ke bagian kiri, sehingga menjadi:
(0T1)-1 0T3 = 1T22T3 (2-14)
(0T1)-1 0T3 = 1T3 (2-15)
Dengan menggunakan persamaan diatas, maka bisa dicari besarnya sudut-sudut joint
Apabila masih ada sudut joint lain yang belum didapatkan, maka pindahkan lagi elemen dibagian kanan ke kiri, sehingga menjadi:
(0T1)-1 . (1T2)-1 . 0T3 = 2T3 (2-16)
(0T2)-1 . 0T3 = 2T3 (2-17)
Dengan bantuan persamaan diatas, maka solusi untuk inverse kinematics bisa didapatkan.
Pendekatan Numerik
Pada umumnya pendekatan numeric tidak mengutamakan diperoleh solusi yang tepat, tetapi mengusahakan perumusan metode yang menghasilkan solusi pendekatan yang berbeda dari solusi yang tepat sebesar suatu nilai yang dapat diterima berdasarkan pertimbangan praktis, tetapi cukup memberikan penghayatan pada persoalan yang dihadapi (Harijono Djojodiharjo, 2000, p3).
Pendekatan numerik memanfaatkan komponen Komputer untuk melakukan perhitungan secara berulang-ulang di dalam mendapatkan solusi inverse kinematics
computer akan menghitung semua kemungkinan solusi secara berulang-ulang sampai didapatkan suatu solusi yang sesuai untuk sudut-sudut joint yang dibutuhkan agar bisa mencapai posisi dan orientasi yang diinginkan.
Cara numeric memang lebih mudah, namun menghabiskan lebih banyak waktu karena sifatnya penggulangannya. Umumya pada solusi numeric algoritma dikembangkan untuk mendapatkan solusi dengan tingkat konvergensi yang baik. Apabila cara numeric menghabiskan waktu terlalu banyak, maka perlu dipertimbangakan penggunaan cara analitik (Craig,1989, p119-120).