PERTUNJUKAN LASER DIGITAL
TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
LEO AGUNG CAHYONO NIM: 005114036
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
DIGITAL LASER SHOW
FINAL PROJECT
Presented as partial fulfillment of the requirements to obtain The Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
LEO AGUNG CAHYONO NIM: 005114036
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
HALAMAN PERSEMBAHAN
+Tftfpsboh!ujebl!ejojmbj!ebsj!tfcfsbqb!ujohhj!ejb!nfmpnqbu-!ubqj!ebsj!
tfcfsbqb!ujohhj!ejb!nfmfoujoh!lfncbmj!tfufmbi!ejb!kbuvi+!
“Setiap kejadian dalam hidup adalah takdir dan kita tidak dapat merubahnya. Namun,
bagaimana kita menyikapinya merupakan pilihan bebas kita. Dan pilihan bebas kita itulah yang
akan menentukan takdir kita selanjutnya”
“Cinta itu
putih
, namun jangan pernah lupa bahwa putih itusebenarnya mejikuhibiniu”
Skripsi ini kupersembahkan untuk:
Baba
⁄
Bapak, Ibu, dan Adikku
⁄
Teman-teman
⁄
KATA PENGANTAR
Puji syukur sebesar-besarnya penulis panjatkan kepada Tuhan Yang Maha
Esa, atas berkah, rahmat, cobaan dan masalah, kesulitan, serta kasih-Nya yang
dilimpahkan kepada penulis, sehingga penulis dapat menyelesaikan skripsi ini dengan
baik.
Penulisan skripsi ini merupakan salah satu syarat untuk menyelesaikan studi
penulis dan untuk memperoleh gelar Sarjana Teknik Program Studi Teknik Elektro di
Universitas Sanata Dharma. Penulisan skripsi ini didasarkan pada hasil-hasil yang
penulis peroleh mulai dari perancangan, pembuatan alat sampai pada pengujian alat
yang, juga kemungkinan pengembangannya.
Dengan selesainya Tugas Akhir yang memberikan banyak sekali pembelajaran
dan pengembangan bagi penulis baik dari segi teknis maupun personalitas ini, maka
penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya kepada:
1. Shrii Shrii Ananda Murtii, as the lovely Baba. Thanks for everything, Baba.
2. Pak Djoko selaku pembimbing I, sekaligus sebagai mentor, dan motivator
yang selalu menemani dan memberikan semangat, serta tidak pernah marah
ataupun kesal walaupun penulis sering “menghilang”.
3. Pak Tjendro, selaku pembimbing II, yang selalu tersenyum dan penuh
pengertian.
4. Para dosen, staf administrasi, serta laboran yang telah banyak memberikan
ilmu pengetahuan, bimbingan, serta kesempatan untuk studi dan juga
menyelesaikannya dengan baik.
5. Bapak, Ibu, Tante Niek, Om Dikin dan Adikku Yus, yang selalu mencintai,
mendukung dan mendoakanku.
6. Rekan-rekan di teknik elektro: Teguh, Wayan, Andan, Titus, Poer, BK, BT,
Stephen, Dewi, Tika, Wahyu, Supri, Bram dan teman-teman lainnya yang
selalu menemani dan memberi masukan serta semangat dalam perjuangan ini.
7. Rekan-rekan di AMURT: Dada Shiila, Paunkaj, Dada Satya, Dada Ratnesh,
Didi Vitaraga, “mother” Amrta, Ista, mbak Sita dan mas Taufik, Mahadeva,
mas Suman, Aravinda, Prabha, dan Baskar atas dukungan, kasih, dan
pengertiannya selama ini. Terus berjuang teman-teman.
Penulis menyadari bahwa dalam karya tulis ini masih terdapat banyak
kekurangan dan masih jauh dari sempurna. Oleh akrena itu segala bentuk masukan,
baik berupa kritik maupun saran yang membangun sangat penulis harapkan dari
pembaca, demi perbaikan dan kesempurnaan skripsi ini.
Terima kasih Tuhan.
Yogyakarta, 27 Maret 2007
PERTUNJUKAN LASER DIGITAL
Disusun oleh: Leo Agung Cahyono
005114036
INTISARI
Sinar laser telah digunakan secara luas dalam berbagai bidang kehidupan, seperti: medis, teknologi elektronika dan komunikasi, militer, serta hiburan. Sebagai sarana hiburan, sinar laser dapat digunakan untuk membangkitkan pola-pola geometris tertentu dengan cara memantulkannya ke sebuah atau beberapa cermin yang diputar dengan kecepatan dan arah putaran tertentu.
Dalam penelitian ini, digunakan dua buah motor DC untuk memutar cermin yang akan digunakan sebagai sasaran pantulan sinar laser. Untuk mengendalikan kecepatan motor digunakan suatu metode pengendalian tegangan yang disebut PWM (Pulse Width Modulation). PWM dihasilkan oleh perangkat mikrokontroler AT89S51 dengan derajat kenaikan duty cycle sebesar 1%. Untuk dapat menghasilkan putaran yang dapat berputar ke dua arah, baik searah maupun berlawanan jarum jam, digunakan driver berupa jembatan H, yang terintegrasi dalam IC L293D. Masukan untuk pengendalian kecepatan dan arah tersebut dapat dilakukan melalui tombol push-button ataupun menggunakan remote control.
Pola-pola yang dihasilkan pada penelitian ini menunjukkan bahwa bentuk dan arah gerakan pola-pola tersebut ditentukan oleh kecepatan dan arah putar cermin pemantulnya.
DIGITAL LASER SHOW
By:
Leo Agung Cahyono 005114036
ABSTRACT
Laser has been widely use in many fields, such as: medic, communication and electronic technology, military and also entertainment. As an entertainment tool, laser can be used to generate several geometrical patterns by reflecting it to one or some mirrors which is rotated with a particular speed and direction.
In this research, two DC motors are used to rotate two mirrors which are going to be used as a target of the laser reflection. To controlled the speed of the motors, a voltage-controlling methoed called Pulse Width Modulation (PWM) is implemented. The PWM is generated with 1% duty cycle increment or decrement by AT89S51 microcontroller. To obtain a rotation which can turn in two directions, clock and counter clock wise, an H-Bridge driver which is integrated in L293D driver is used. The inputs to control the speed and direction use push-button and remote control.
The patterns that are generated in this research show that the shapes and the movement directions of those patterns are determined by the speed and the rotation direction of the reflecting mirrors.
DAFTAR ISI
Halaman Judul ... i
Halaman Persetujuan ... iii
Halaman Pengesahan ... iv
Halaman Pernyatan Keaslian Karya ... v
Halaman Persembahan... vi
Kata Pengantar ... vii
Intisari ... ix
Abstract ... x
Daftar Isi ... xi
Daftar Gambar ... xiv
Daftar Tabel ... xvi
Daftar Lampiran... xvii
BAB I. PENDAHULUAN 1.1. Latar Belakang Masalah ... 1
1.2. Perumusan Masalah ... 1
1.3. Pembatasan Masalah... 1
1.4. Tujuan dan Manfaat Penelitian ... 2
1.5. Metodologi Penelitian... 2
1.6. Sistematika Penulisan ... 3
BAB II. DASAR TEORI 2.1. Pola-Pola Dasar Hasil Tampilan Perangkat Laser Show... 4
2.2. Kurva Lissajous ... 5
2.3. Hypotrochoid ... 6
2.3.1. Hypocycloid... 7
2.3.2. Rose... 9
2.4. Laser ... 10
2.5. Keunggulan Utama Laser ... 11
2.6. Mikrokontroler AT89S51 ... 12
2.6.2. Struktur Memori... 12
2.6.2.1. RAM Internal ... 13
2.6.2.2. Special Function Register ... 14
2.6.2.3. Flash PEROM ... 14
2.6.3. Timer... 14
2.6.3.1. Timer Untuk Menghasilkan Tunda Waktu ... 16
2.6.3.2. Tunda Waktu Menggunakan Looping ... 16
2.6.4. Interupsi ... 17
2.7. Rangkaian Single Chip Mikrokontroler ... 19
2.8. Remote Control... 20
2.8.1. Remote Control Sony... 21
2.8.2. IR Receiver Module... 22
2.9. Motor DC ... 22
2.10. Penampil Seven-Segment ... 24
2.11. Pulse Width Modulation ... 25
2.12. Transistor Sebagai Saklar ... 26
2.12.1. Kondisi Cuf-off... 27
2.12.2. Kondisi Saturasi ... 27
2.13. H-Bridge ... 28
BAB III. PERANCANGAN 3.1. Diagram Kotak Laser Digital... 31
3.2. Konstruksi Dasar Digital Laser Show... 33
3.3. Input Interface... 35
3.3.1. Pengontrolan Menggunakan Tombol Push-Button... 35
3.3.2. Pengontrolan Secara Nirkabel Menggunakan Remote Control ... 36
3.4. Driver Motor DC... 37
3.5. Tampilan Seven-Segment ... 39
3.6. Perancangan Perangkat Lunak... 41
3.6.1. Diagram Alir Utama ... 41
3.6.2. Diagram alir Proses Inisilasisasi Utama ... 42
3.6.3. Interupsi Generator PWM... 42
3.6.4. Diagram Alir Interupsi Penekanan Tombol ... 43
3.6.4.2. Diagram Alir Subrutin Pengubahan Arah Motor... 46
3.6.5. Diagram Alir Pendeteksian Remote Control ... 47
3.6.5.1. Diagram Alir Subrutin Tunda 2,45 mS... 51
3.6.6. Interupsi Scanning 7-Segment ... 52
3.6.6.1. Diagram alir Subrutin Pengubahan Data dari Heksa Desimal Menjadi BCD ... 53
BAB IV. PENGAMATAN DAN PEMBAHASAN 4.1. Pengamatan Terhadap Sinyal Keluaran IR Receiver Module ... 56
4.2. Pengamatan Terhadap Pulsa PWM... 57
4.3. Hubungan kecepatan motor dengan presentase PWM... 59
4.4. Hubungan PWM, kecepatan motor, dan pola yang dihasilkan ... 64
4.5. Bentuk fisik alat ... 66
4.6. Penempatan mekanis motor, cermin, dan laser... 67
BAB V. KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 69
5.2. Saran ... 69
Daftar Pustaka ... 70
DAFTAR GAMBAR
Gambar 2.1. Prinsip dasar operasi laser show ... 4
Gambar 2.2. Pola dasar hasil tampilan laser show... 5
Gambar 2.3. Beberapa contoh kurva Lissajous ... 6
Gambar 2.4. Ilustrasi definisi hypotrochoid ... 6
Gambar 2.5. Ilustrasi definisi hypocycloid ... 7
Gambar 2.6. Hypocycloid dengan n berupa bilangan integer ... 8
Gambar 2.7. Hypocycloid dengan a/b berupa bilangan rasional ... 8
Gambar 2.8. Hypocycloid dengan a/b berupa bilangan irrasional ... 8
Gambar 2.9. Rose dengan n berupa bilangan ganjil dan genap ... 9
Gambar 2.10. Rose dengan n berupa bilangan rasional ... 9
Gambar 2.11. Rose dengan n berupa bilangan irrasional ... 10
Gambar 2.12. Alamat RAM internal dan Flash PEROM ... 13
Gambar 2.13. Register TMOD... 14
Gambar 2.14. Register TCON ... 16
Gambar 2.15. Register IE... 18
Gambar 2.16. Sumber interupsi ... 18
Gambar 2.17. Rangkaian single chip microcontroller ... 19
Gambar 2.18. Rangkaian reset secara manual ... 20
Gambar 2.19. Pemodulasian sinyal infra merah ... 21
Gambar 2.20. Pengkodean lebar pulsa SIRC Sony... 21
Gambar 2.21. Protokol SIRC Sony... 22
Gambar 2.22. Diagram blok receiver infra merah ... 22
Gambar 2.23. Prinsip kerja motor DC ... 23
Gambar 2.24. Seven-segment ... 24
Gambar 2.25. Pengkabelan internal seven-segment ... 24
Gambar 2.26. Sinyal PWM dengan duty cycle bervariasi ... 26
Gambar 2.27. Transistor NPN sebagai saklar pada kondisi ideal versi electron flow 26 Gambar 2.28. Transistor PNP sebagai saklar pada kondisi ideal versi electron flow 28 Gambar 2.29. Rangkaian dasar sebuah H-bridge... 28
Gambar 2.30. Diagram internal IC L293D ... 29
Gambar 3.2. Layout digital laser show ... 34
Gambar 3.3. Rangkaian antara push-button dengan mikrokontroler ... 35
Gambar 3.4. Rangkaian antara IR Receiver dengan mikrokontroler... 37
Gambar 3.5. Rangkaian driver motor DC... 37
Gambar 3.6. Rangkaian seven-segment... 39
Gambar 3.7. Diagram alir utama... 41
Gambar 3.8. Diagram alir inisialisasi mikrokontroler ... 42
Gambar 3.9. Diagram alir interupsi timer 1: PWM ... 43
Gambar 3.10. Diagram alir interupsi penekanan tombol ... 44
Gambar 3.11. Diagram alir subrutin tunda bouncing ... 45
Gambar 3.12. Diagram alir subrutin tunggu tombol dilepas ... 46
Gambar 3.13. Diagram alir interupsi pendeteksian remote control ... 48
Gambar 3.14. Diagram alir subrutin tunda 2,45 mS ... 51
Gambar 3.15. Diagram alir tampilan seven-segment... 52
Gambar 3.16. Diagram alir subrutin pengubahan data dari heksa decimal menjadi BCD ... 54
Gambar 3.17. Diagram alir subrutin pengecekan dan pengubahan nibble ... 55
Gambar 4.1. Sinyal keluaran IR Receiver module ... 56
Gambar 4.2. Bentuk pulsa PWM dengan duty cycle 63%... 57
Gambar 4.3. Hubungan kecepatan putar searah jarum jam (CW) motor 1 terhadap presentase PWM ... 60
Gambar 4.4. Hubungan kecepatan putar berlawanan jarum jam (CCW) motor 1 terhadap presentase PWM... 61
Gambar 4.5. Hubungan kecepatan putar searah jarum jam (CW) motor 2 terhadap presentase PWM ... 60
Gambar 4.6. Hubungan kecepatan putar berlawanan jarum jam (CCW) motor 2 terhadap presentase PWM... 60
Gambar 4.7. Bentuk fisik alat ... 66
DAFTAR TABEL
Tabel 2.1. Jenis-jenis laser besera panjng gelombang dan penggunaannya ... 10
Tabel 2.2. Mode kerja timer... 15
Tabel 2.3. Tabel kebenaran IC L293D... 30
Tabel 3.1. Arah putaran motor DC ... 38
Tabel 3.2. Interupsi yang digunakan pada program Digital Laser Show... 41
Tabel 3.3. Perancangan fungsi dari tombol remote control yang ditekan ... 50
Tabel 4.1. Fungsi dari tombol remote control yang ditekan ... 57
Tabel 4.2. Data pengamatan duty cycle PWM ... 58
Tabel 4.3. Kecepatan motor 1 saat berputar searah jarum jam (CW)... 60
Tabel 4.4. Kecepatan motor 1 saat berputar berlawanan jarum jam (CCW) ... 61
Tabel 4.5. Kecepatan motor 2 saat berputar searah jarum jam (CW)... 62
Tabel 4.6. Kecepatan motor 2 saat berputar berlawanan jarum jam (CCW) ... 63
Tabel 4.7. Pola yang terbentuk saat kedua motor berputar searah... 64
DAFTAR LAMPIRAN
Lampiran I Rangkaian Digital Laser Show
Lampiran II Source code program Digital Laser Show
Lampiran III Kode tombol remote control SONY RM-687C
Lampiran IV Datasheet mikrokontroler Atmel AT89S51
Lampiran V Datasheet IC L293D
Lampiran VI Datasheet Transistor BC516
BAB I
PENDAHULUAN
1.1. Latar Belakang
Sejak pertama kali berhasil diujicobakan pada tahun 1960 oleh fisikawan
Amerika Serikat, Theodore Harold Maiman (Microsoft, 2005), teknologi dan aplikasi
laser terus berkembang dengan pesat. Hal ini mengakibatkan berbagai bidang yang
mengaplikasikan laser dalam sistemnya seperti medis, teknologi elektronika dan
komunikasi, militer, serta hiburan juga mendapat berbagai kemajuan yang cukup
berarti.
Dalam bidang hiburan, laser digunakan untuk mendapatkan efek-efek visual
yang biasanya mengiringi sebuah pertunjukan kembang api. Efek-efek sinar laser
telah memancing rasa keingintahuan banyak orang tentang apa sebenarnya sinar laser
itu dan bagaimana caranya menghasilkan pola-pola yang indah tersebut.
Seperangkat alat profesional akan menjadi terlalu berlebihan apabila hanya
akan digunakan untuk memuaskan rasa keingintahuan tersebut. Karena selain mahal,
tentu juga membutuhkan sumber daya listrik dan standar operasional yang tinggi.
Untuk itu, diperlukan suatu miniatur yang lebih sederhana namun tetap dapat
digunakan sebagai sarana hiburan sekaligus pembelajaran.
1.2. Perumusan Masalah
Dari latar belakang masalah tersebut diatas, dapat dirumuskan menjadi
beberapa masalah sebagai berikut:
1. Bagimana menghasilkan suatu perangkat keras laser show yang kompak dan
portable namun tetap dapat menghasilkan berbagai pola-pola visual?
2. Bagaimana membuat program untuk mendukung perangkat tersebut?
3. Bagaimana menghasilkan perangkat laser show yang user friendly?
4. Bagaimana menghasilkan perangkat laser show yang dapat dikendalikan dari
jauh menggunakan remote control?
1.3. Pembatasan Masalah
Dalam pembuatan peralatan laser show digital ini dilakukan beberapa batasan
1. Metode untuk mendapatkan berbagai efek visual adalah dengan memantulkan
sinar laser pada cermin yang berputar.
2. Pengaturan kecepatan putaran cermin dilakukan dengan metode Pulse Width
Modulation (PWM) secara digital.
3. Besaran kenaikan atau penurunan duty cycle adalah 1%.
4. Isyarat masukan diberikan dengan menekan push button atau menggunakan
remote control infra merah.
5. Motor yang digunakan merupakan motor dc sebanyak dua buah.
6. Mikrokontoler yang digunakan adalah AT89S51 buatan ATMEL.
7. Sumber cahaya laser yang digunakan berasal dari laser pointer.
1.4. Tujuan dan Manfaat Penelitian
Tujuan penelitian ini adalah menghasilkan suatu perangkat digital laser show
yang mampu menghasilkan berbagai pola visual akibat pantulan sinar laser terhadap
dua buah cermin yang berputar. Kedua cermin tersebut diputar pada titik tengahnya
menggunakan dua buah motor DC, dan kecepatannya akan diatur menggunakan
metode PWM atau Pulse Width Modulation.
Manfaat yang didapat user dari penelitian ini adalah peralatan ini dapat
digunakan sebagai sarana hiburan untuk berbagai kalangan pengguna, serta dapat
dijadikan sarana pembelajaran bagi mereka yang tertarik untuk mengembangkan teori
dan aplikasi PWM serta laser dalam dunia sehari-hari khususnya sebagai sarana
hiburan.
Manfaat yang didapatkan penulis dari penelitian ini adalah:
1. Sebagai sarana pembelajaran teori maupun aplikasi sinar laser.
2. Sebagai sarana pembelajaran teori maupun aplikasi PWM.
3. Sebagai sarana pembelajaran teori maupun aplikasi mikrokontroler AT89S51.
4. Sebagai sarana pembelajaran pembuatan penelitian yang terstruktur dan baik.
1.5. Metodologi Penelitian
1. Studi pustaka tentang teknik pengendalian kecepatan dan arah putar untuk
laser show, serta pengiriman sinyal melalui remote control.
2. Perancangan schematic digital laser show.
3. Perancangan software pengendalian kecepatan dan arah putar menggunakan
4. Perancangan layout PCB digital laser show.
5. Implementasi flowchart digital laser show dalam bentuk progam yang
terstruktur.
6. Pengambilan dan analisis data dari perangkat yang berhasil diperoleh.
1.6. Sistematika Penulisan
BAB I PENDAHULUAN
Memuat gambaran secara umum mengenai isi tugas akhir
BAB II DASAR TEORI
Memuat tinjauan kepustakaan yang merupakan landasan teori dari
masalah yang akan dibahas
BAB III PERANCANGAN
Memuat penjelasan mengenai perancangan alat, baik secara hardware
maupun software.
BAB IV PENGAMATAN DAN PEMBAHASAN
Memuat data-data peralatan yang dibuat disertai pembahasannya
BAB II
DASAR TEORI
Laser show pada dasarnya merupakan suatu hiburan yang dihasilkan dari
manipulasi sinar laser untuk mendapatkan pola-pola geometris tertentu. Secara sederhana,
hal ini dapat dilakukan dengan memantulkan sinar laser terhadap satu atau beberapa
cermin yang berputar sebelum akhirnya dipantulkan ke dinding atau layar. Tampilan pada
layar inilah yang kemudian dapat diamati sebagai pola-pola geometris (Harsono, 2005).
Gambar 2.1 mengilustrasikan bagaimana hal ini dilakukan.
2
1 3
4
5
Gambar 2.1. Prinsip dasar operasi laser show (Harsono, 2005)
Keterangan gambar:
1. Laser pointer
2. Pantulan sinar laser
3. Cermin
4. Motor DC
5. Pola yang dihasilkan
2.1. Pola-Pola Dasar Hasil Tampilan Perangkat Laser Show
Pola-pola dasar hasil tampilan perangakat laser show berdasarkan kondisi putaran
motor adalah sebagai berikut (Harsono, 2005):
1. Pola dasar saat kedua motor tidak berputar adalah berupa titik sinar laser yang diam.
2. Pola dasar saat salah satu motor berputar sedangkan motor yang lain diam adalah
3. Pola dasar saat kedua motor berputar dengan arah yang sama adalah berbentuk seperti
gambar 2.2(b).
4. Pola dasar saat kedua motor berputar dengan arah yang berlawanan yakni CW dan
CCW adalah berbentuk seperti gambar 2.2(c).
(a) (b) (c)
Gambar 2.2. Pola dasar hasil tampilan perangkat laser show (Harsono, 2005)
(a) Salah satu berputar (b) Dua motor berputar searah (c) Dua motor berputar berlawanan
2.2. Kurva Lissajous
Dalam matematika, kurva Lissajous (Gambar Lissajous atau Kurva Bowditch)
merupakan grafik dari sistem persamaan parametris seperti ditunjukkan pada persamaan
2.1. Persamaan ini menjelaskan gerakan harmonik kompleks. Keluarga kurva-kurva
semacam ini diteliti oleh Nathaniel Bowditch pada 1815, dan diteliti lebih lanjut oleh
Jules Antoine Lissajous pada 1857 (---, 2007).
(2.1)
Tampilan kurva sangat dipengaruhi oleh perbandingan a/b. Untuk hasil
perbandingan sama dengan satu, grafiknya akan berbentuk elips, dengan kasus khusus
meliputi bentuk lingkaran (untuk A = B, δ = π/2 radian), dan garis (untuk δ = 0). Bentuk
sederhana lissajous yang lain adalah parabola (untuk a/b = 2, δ = π/2). Perbandingan yang
lain akan menghasilkan kurva yang lebih kompleks, yang akan berupa kurva tertutup bila
a/b menghasilkan bilangan rasional (---, 2007).
Sebelum tercipta komputer grafis modern, Lissajous biasanya dihasilkan
menggunakan osiloskop. Dua masukan sinusoidal berbeda fase dihubungkan pada
osiloskop dalam mode X-Y dan perbedaan fase antara keduanya akan ditampilkan dalam
menggunakan harmonograph. Dalam osiloskop, diandaikan x adalah Ch1, dan y adalah
Ch2. A merupakan amplitudo Ch1, dan B merupakan amplitudo Ch2. Sedangkan a
merupakan frekuensi Ch1, dan b merupakan frekuensi Ch2 sehingga a/b merupakan
perbandingan frekuensi dari kedua channel, dan δ merupakan beda fase dari kurva sinus
Ch1. Gambar 2.3 memeperlihatkan beberapa kurva Lissajous dengan δ = π/2, a bilangan
ganjil, b bilangan genap, dan |a - b| = 1. (---, 2007).
a = 1, b = 2 (a:b = 1:2)
a = 3, b = 2 (a:b = 3:2)
a = 3, b = 4 (a:b = 3:4)
a = 5, b = 4 (a:b = 5:4)
a = 5, b = 6 (a:b = 5:6)
a = 9, b = 8 (a:b = 9:8)
Gambar 2.3. Beberapa contoh kurva Lissajous (---, 2007)
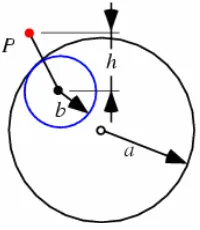
2.3. Hypotrochoid
Hypotrochoid merupakan suatu roulette yang tercitrakan dari sebuah titik P yang
terhubung dengan sebuah lingkaran dengan radius b, yang bergerak mengelilingi bagian
dalam lingkaran lain dengan radius a, dengan P merupakan jarak h, dari titik pusat
lingkaran yang di dalam. Ilustrasi dari definisi hypotrochoid diperlihatkan pada gambar
2.4. Persamaan parametrik dari sebuah hypotrochoid ditunjukkan seperti pada persamaan
2.2 dan 2.3 (Weisstein, 2006).
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + − = t b b a h t b a
x ( )cos cos (2.2)
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − − = t t b a h t b a
y ( )cos cos (2.3)
Bentuk-bentuk khusus dari hypotrochoid antara lain adalah: hypocycloid dengan h
= b, ellipse dengan a = 2b, dan rose dengan nilai a dan b sesuai persamaan berikut
(Weisstein, 2006): 1 2 + = n h n
a , dan
1 ) 1 ( + − = n h n b (2.4)
2.3.1. Hypocyloid
Hypocycloid merupakan kurva yang dihasilkan dari sebuah titik tetap P yang
berada pada keliling sebuah lingkaran kecil ber-radius b, yang berputar mengelilingi
bagian dalam lingkaran yang lebih besar dengan radius a, dengan a > b. Oleh karena itu
hypocycloid merupakan hypotrochoid dengan h = b. Ilustrasi dari definisi tersebut
diperlihatkan pada gambar 2.5. (Weisstein, 2006).
Gambar 2.5. Ilustrasi definisi hypocycloid (Weisstein, 2006)
Sebuah hypocycloid berpetal n, mempunyai persamaan . Untuk
adalah bilangan integer, dan x(0) = a, maka nilai x dan y hypocycloid
ditunjukkan pada persamaan 2.5 dan 2.6. Beberapa gambar hypocycloid dengan n bernilai
integer diperlihatkan pada gambar 2.6 (Weisstein, 2006).
b a n= /
x = (2.5)
y = (2.6)
Gambar 2.6. Hypocycloid dengan n berupa bilangan integer (Weisstein, 2006).
Apabila n≡a/b merupakan bilangan rasional, maka kurvanya akan tertutup dan
mempunyai a petal. Beberapa ilustrasi hypocycloid dengan bernilai rasional
diperlihatkan pada gambar 2.7. Sedangkan apabila merupakan bilangan irrasional
maka kurvanya tidak akan pernah menutup. Hypocycloid dengan berupa bilangan
irrasional ditunjukkan pada gambar 2.8 (Weisstein, 2006).
b a/
b a/
b a/
Gambar 2.7. Hypocycloid dengan a/b berupa bilangan rasional (Weisstein, 2006).
2.3.2. Rose
Rose merupakan sebuah kurva yang berbentuk seperti kelopak bunga. Kurva ini
diberi nama rhodonea oleh seorang matematikawan Italia bernama Guido Grandi antara
tahun 1723 dan 1728 karena bentuknya yang menyerupai mawar. Persamaan polar untuk
rose diperlihatkan pada persamaan 2.7. Apabila n merupakan bilangan ganjil maka rose
akan memiliki kelopak sebanyak n. Sedangkan apabila n genap maka kelopaknya
berjumlah 2n. Beberapa gambar rose dengan n ganjil dan genap diperlihatkan pada
gambar 2.9 (Weisstein, 2006).
atau (2.7)
Gambar 2.9. Rose dengan n berupa bilangan ganjil dan genap (Weisstein, 2006)
Seandainya merupakan bilangan rasional, maka kurvanya akan menutup
pada sudut polar , dengan jika adalah ganjil, dan jika adalah
genap. Sedangkan apabila n merupakan bilangan irrasional maka jumlah kelopaknya
adalah tak terhingga. Bentuk rose dengan n berupa bilangan rasional diperlihatkan pada
gambar 2.10, sedangkan untuk n berupa bilangan irrasional diperlihatkan pada gambar
2.11 (Weisstein, 2006).
Gambar 2.11. Rose dengan n berupa bilangan irrasional (Weisstein, 2006)
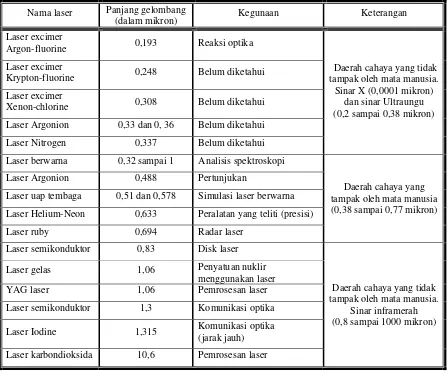
2.4. Laser
Tabel 2.1. Jenis-jenis laser beserta panjang gelombang dan kegunaannya (Matsuda, 1987)
Nama laser Panjang gelombang
(dalam mikron) Kegunaan Keterangan
Laser excimer
Argon-fluorine 0,193 Reaksi optika
Laser excimer
Krypton-fluorine 0,248 Belum diketahui
Laser excimer
Xenon-chlorine 0,308 Belum diketahui
Laser Argonion 0,33 dan 0, 36 Belum diketahui
Laser Nitrogen 0,337 Belum diketahui
Daerah cahaya yang tidak tampak oleh mata manusia. Sinar X (0,0001 mikron)
dan sinar Ultraungu (0,2 sampai 0,38 mikron)
Laser berwarna 0,32 sampai 1 Analisis spektroskopi
Laser Argonion 0,488 Pertunjukan
Laser uap tembaga 0,51 dan 0,578 Simulasi laser berwarna
Laser Helium-Neon 0,633 Peralatan yang teliti (presisi)
Laser ruby 0,694 Radar laser
Daerah cahaya yang tampak oleh mata manusia (0,38 sampai 0,77 mikron)
Laser semikonduktor 0,83 Disk laser
Laser gelas 1,06 Penyatuan nuklir menggunakan laser YAG laser 1,06 Pemrosesan laser
Laser semikonduktor 1,3 Komunikasi optika
Laser Iodine 1,315 Komunikasi optika (jarak jauh)
Laser karbondioksida 10,6 Pemrosesan laser
Daerah cahaya yang tidak tampak oleh mata manusia.
Laser yang merupakan kependekan dari Light Amplification by Stimulated
Emission of Radiation adalah paket berkas cahaya yang gelombang-gelombang
puncaknya terdapat pada kedudukan panjang yang sama, pada waktu yang sama, serta
pada arah gerakan yang sama pula, atau secara sederhana dapat dikatakan sebagai suatu
berkas cahaya yang terdiri atas gelombang-gelombang yang sama dan sebangun. Pada
berkas cahaya ini tidak dijumpai adanya beberapa panjang gelombang yang berbeda
seperti pada berkas cahaya matahari (Matsuda, 1987).
Panjang gelombang laser tergantung dari mediumnya, atau lebih tepatnya lagi
pada tipe atom dan molekul yang terdapat di dalam medium itu. Sebagai contoh adalah
laser ruby, laser tersebut dibuat dari cahaya yang dipancarkan oleh atom-atom khrom dan
memiliki panjang gelombang 0,6943 mikron (Matsuda, 1987). Beberapa jenis laser
beserta panjang gelombang dan kegunaannya dapat dilihat pada tabel 2.1
2.5. Keunggulan Utama Laser
Laser mempunyai empat kelebihan utama yang menonjol yang tidak dijumpai
dalam cahaya matahari maupun cahaya yang berasal dari listrik, yaitu: (Matsuda, 1987)
1. Sifatnya yang monokromatis atau dengan perkataan lain laser hanya memiliki satu
warna cahaya (panjang gelombang) saja. Sehingga apabila laser dilewatkan pada
prisma, sinarnya tidak akan terurai.
2. Arah sorotnya yang sangat baik. Laser menyorot menurut garis lurus dan hampir tidak
menyebar sehingga hampir tidak mengalami penurunan energi.
3. Energinya memiliki kerapatan (densitas) yang tinggi sehingga tenaganya yang luar
biasa besar itu dapat dipusatkan pada sebuah titik yang sangat kecil menggunakan
lensa. Pemusatan energi ini dapat menghasilkan energi yang cukup besar dan
temperatur yang tinggi.
4. Sifat koherennya (pertaliannya) yang baik. Sifat koheren ini dapat dilihat apabila laser
dilewatkan pada serangkaian lubang kecil maka gelombang cahaya keluarannya akan
bertumpuk membentuk pola-pola garis yang sangat rapi. Hal ini dikarenakan sinar
laser mempunyai gelombang yang sebangun dan sama. Aplikasi dari tingginya sifat
koherensi laser adalah penggunaan laser pada holografi tiga dimensi dan juga sebagai
2.6. Mikrokontroler AT89S51 2.6.1. Pengenalan Mikrokontroler
Mikrokontroler atau biasa disingkat MCU adalah suatu keping komputer tunggal
yang bertugas mengeksekusi program yang digunakan oleh user untuk mengontrol satu
atau beberapa peralataan. Program ini dapat disimpan di dalam keping memori EEPROM
eksternal atau dalam memori EEPROM internal di dalam mikrokontroler itu sendiri.
Mikrokontroler dapat ditemukan di dalam peralatan-peralatan seperti oven mirowave,
mobil, keyboard, pemutar CD, telepon genggam, VCR, sistem keamanan, dan sebagainya
(Steiner, 2004).
Mikrokontroler digunakan dalam sistem-sistem yang membutuhkan kemampuan
berkomputasi yang tidak sekompleks komputasi pada komputer sekelas 486 atau pentium.
Sistem-sistem berbasiskan mikrokontroler secara umum lebih kecil, lebih handal, dan
lebih murah. Mereka ideal untuk digunakan pada aplikasi-aplikasi seperti tersebut diatas,
dimana ukuran dan biaya adalah pertimbangan yang sangat diutamakan (Steiner, 2004).
Mikrokontroler AT89S51 adalah mikrokontroler keluaran Atmel dengan 4K byte
in-system programmable Flash memori. On-chip Flashnya memungkinkan memori
program untuk diprogram di dalam sistem atau menggunakan programmer memori
nonvolatile konvensional. (Atmel, 2001). Memori program internal ini memungkinkan
AT89S51 untuk bekerja dalam mode operasi keping tunggal yang tidak memerlukan
memori eksternal untuk menyimpan source codenya (Nalwan, 2003).
2.6.2. Struktur Memori
AT89S51 mempunyai struktur memori yang terdiri atas (Nalwan 2003):
1. RAM internal, yaitu memori sebesar 128 byte yang biasanya digunakan untuk
menyimpan variabel atau data yang bersifat sementara.
2. Spesial Function Register atau SFR, yaitu memori yang berisi register-register yang
mempunyai fungsi khusus yang disediakan oleh mikrokontroler, seperti timer, serial,
dan lain-lain.
3. Flash PEROM, memori yang digunakan untuk menyimpan instruksi-instruksi
MCS-51.
Seperti terlihat pada gambar 2.12, AT89S51 mempunyai struktur memori yang
terpisah antara RAM dan Flash PEROMnya. RAM internal dialamati oleh RAM Address
adanya struktur memori yang terpisah tersebut, walaupun RAM internal dan Flash
PEROM mempunyai alamat awal yang sama, yaitu 00, namun secara fisik kedua memori
tersebut tidak saling berhubungan (Nalwan, 2003).
Gambar 2.12. Alamat RAM internal dan Flash PEROM
2.6.2.1. RAM Internal
RAM internal pada AT89S51 menempati alamat memori RAM antara 00H hingga
7FH. Menurut Nalwan, 2003, RAM internal terdiri atas:
1. Register banks
89S51 mempunyai delapan buah register mulai dari R0 hingga R7. Kedelapan buah
register ini selalu terletak pada bank 0 atau alamat 00H hingga 07H setiap kali sistem
direset. Namun posisi R0 hingga R7 dapat dipindah ke bank 1 (08H hingga 0FH),
bank 2 (10H hingga 17H), atau bank 3 (18H hingga 1FH) dengan mengatur bit RS0
dan RS1 pada PSW atau Program Status Word.
2. Bit Addressable RAM
RAM pada alamat 20H hingga 2FH dapat diakses secara pengalamatan bit sehingga
hanya dengan sebuah instruksi saja, setiap bit dalam area ini dapat diset, clear, AND,
atau di-OR-kan.
3. General Purpose RAM
General Purpose RAM terletak pada alamat 30H hingga 7FH dan dapat diakses
2.6.2.2. Special Function Register
AT89S51 mempunyai 21 Spesial Function Register atau SFR yang terletak antara
alamat 80H hingga FFH. Beberapa dari register-register ini juga mampu dialamati dengan
pengalamatan bit sehingga dapat dioperasikan seperti pada Bit Addressable RAM
(Nalwan, 2003).
2.6.2.3. Flash PEROM
AT89S51 mempunyai 4K byte Flash PEROM atau Programmable and Erasable
Read Only Memory, yaitu ROM yang dapat ditulis ulang atau dihapus menggunakan
sebuah perangkat programmer. Flash PEROM dalam AT89S51 menggnakan Atmel’s
High-Density Non Volatile Technology yang mempunyai kemampuan untuk ditulis ulang
hingga 1000 kali. Program yang ada pada Flash PEROM akan dijalankan jika pada saat
di-reset, pin EA/VP berlogika “1” sehingga mikrokontroler aktif berdasarkan program
yang ada pada Flash PEROMnya. Namun, jika pin EA/VP berlogika “0”, mikrokontroler
aktif berdasarkan program yang ada pada memori eksternal (Nalwan, 2003).
2.6.3. Timer
AT89S51 mempunyai dua buah timer, yaitu timer 0 dan timer 1 yang
masing-masing mempunyai 16 bit counter yang mampu diatur keaktifan maupun mode
operasinya, direset, dan diset dengan nilai tertentu. Untuk mengatur kedua timer ini,
AT89S51 mempunyai enam buah Special Function Register, yaitu (Nalwan, 2003):
1. Timer Mode Register (TMOD)
Tidak dapat dialamati secara bit (not bit addresable)
Timer 1 Timer 0
Gate (1) C/T (1) M1 (1) M0 (1) Gate (0) C/T (0) M1 (0) M0 (0)
Gambar 2.13. Register TMOD (Nalwan, 2003)
Seperti terlihat pada gambar 2.13, register TMOD berupa 8 bit register yang
terletak pada lamat 89h dengan fungsi setiap bitnya adalah sebagai berikut (Nalwan,
2003):
Gate : Timer akan berjalan jika bit ini diset dan INT0 (untuk timer0) dan
C/T : 1 = counter 0 = timer
M1 dan M0 : Untuk memilih mode kerja timer, seperti terlihat pada table 2.4.
Tabel 2.2. Mode kerja timer (Nalwan, 2003)
M1 M0 Mode Fungsi
0 0 0 Pencacah biner 13 bit
0 1 1 Pencacah biner 16 bit
1 0 2 Pencacah biner 8 bit dengan isi ulang
1 1 3 Gabungan pencacah biner 16 bit dan 8 bit
2. THx dan TLx
Setiap timer dalam AT89S51 terdiri atas 16 bit counter yang masing-masing
tersimpan dalam dua buah register yaitu THx untuk Timer High Byte dan TLx untuk
Timer Low Byte (Nalwan, 2003):
TH0 : Timer 0 High Byte terletak pada alamat 8Ah
TL0 : Timer 0 Low Byte terletak pada alamat 8Bh
TH1 : Timer 1 High Byte terletak pada alamat 8Ah
TL1 : Timer 1 Low Byte terletak pada alamat 8Bh.
3. Timer Control Register (TCON)
Keempat bit teratas register TCON mempunyai fungsi yang berhubungan
dengan timer sementara sisanya digunakan untuk mendukung fungsi interupsi.
Register ini bersifat bit addressable sehingga bit TF1 dapat disebut TCON.7, TR1
sebagai TCON.6, dan seterusnya. Seperti terlihat pada gambar 2.14, fungsi-fungsi
keempat bit yang berhubungan dengan timer adalah sebagai berikut (Nalwan, 2003):
TCON.7 atau TF1 : Timer 1 Overflow Flag yang akan diset jika timer
overflow. Bit ini dapat di-clear oleh software atau oleh
hardware pada saat program menuju ke alamat interrupt
vector
TCON.6 atau TR1 : 1 = Timer 1 aktif
0 = Timer 1 non aktif
TCON.4 atau TR0 : Sama dengan TF1
TCON.3 hingga TCON.0 Akan dibahas pada bagian interupsi.
Dapat diakses secara bit (bit addressable)
Register Timer Register Interupsi
88h TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
TCON.7 TCON.6 TCON.5 TCON.4 TCON.3 TCON.2 TCON.1 TCON.0
Gambar 2.14. Register TCON (Nalwan, 2003)
2.6.3.1. Timer Untuk Menghasilkan Tunda Waktu
Tunda maksimal yang dapat dihasilkan oleh timer 16 bit adalah (Nalwan, 2003):
65535 x kristal frekuensi
12
Tundamax = (2.8)
Sedangkan persamaan untuk menentukan jumlah_step yang diperlukan bagi timer 16 bit
untuk menghasilkan tunda waktu (delay) tertentu adalah:
12
kristal _ frek * delay step
_
Jumlah = (2.9)
Nilai THx/TLx yang perlu dimasukkan untuk menghasilkan tunda waktu tersebut dapat
dicari dengan menggunakan persamaan:
THx/TLx = FFFFh – Jumlah_step (hexa) + 1h (2.10)
2.6.3.2. Tunda Waktu Menggunakan Looping
Selain menggunakan timer, tunda waktu juga dapat dihasilkan dengan melakukan
looping dengan persamaan (Putra, 2002):
cycle _ machine x
12 f
1 putar _
Tunda =
12 f x putar _ Tunda cycle
_
Machine =
Apabila looping tersebut menggunakan perintah DJNZ (Decrement register and Jump if
Not Zero) yang membutuhkan dua machine cycle untuk menjalankannya, maka nilai yang
12 f x putar _ Tunda x
2 1 register _
Nilai = (2.11)
2.6.4. Interupsi
Interupsi adalah suatu kejadian atau peristiwa yang menyebabkan mikrokontroler
berhenti sejenak untuk melayani interupsi tersebut. Program yang dijalankan pada saat
melayani interupsi disebut Interrupt Service Routine (rutin layanan interupsi). Saat terjadi
interupsi, program akan berhenti sesaat, menjalankan program yang berada pada alamat
yang ditunjuk oleh vektor dari interupsi yang terjadi hingga selesai dan kembali
meneruskan program yang terhenti oleh interupsi tadi (Nalwan, 2002).
Dalam suatu kondisi, dapat juga dibutuhkan suatu program yang sedang berjalan
tidak boleh diinterupsi. Untuk itu, AT89S51 mempunyai lima buah interupsi yang
masing-masing dapat di-enable ataupun di-disable satu per satu. Pengaturan keaktifan
interupsi dilakukan pada Interrupt Enable Register (Register pengaktif interupsi) yang
terletak pada alamat A8h, seperti terlihat pada gambar 2.15. Fungsi masing-masing
register tersebut adalah sebagai berikut (Nalwan, 2003):
EA : Menonaktifkan semua interupsi jika bit ini clear. Jika bit ini clear maka apapun
kondisi bit lain dalam register ini, semua interupsi tidak akan dilayani. Oleh
karena itu untuk mengaktifkan salah satu interupsi, bit ini harus set.
ES : Mengaktif/nonaktifkan interupsi portserial, set = aktif, clear = non aktif.
Jika interupsi port serial aktif, interupsi akan terjadi setiap ada data yang masuk
ataupun keluar melalui port serial yang ditandai flag RI (Receive Interrupt flag)
ataupun TI (Transmit Interrupt flag) set.
ET1 : Mengaktif/nonaktifkan interupsi timer 1, set = aktif, clear = non aktif.
Jika interupsi ini aktif, interupsi akan terjadi pada saat timer 1 overflow.
EX1 : Mengaktif/nonaktifkan interupsi eksternal 1, set = aktif, clear = non aktif.
Jika interupsi ini aktif, interupsi akan terjadi pada saat terjadi logika 0 pada
1 INT .
ET0 : Mengaktif/nonaktifkan interupsi timer 0, set = aktif, clear = non aktif.
EX0 : Mengaktif/nonaktifkan interupsi eksternal 1, set = aktif, clear = non aktif.
Jika interupsi ini aktif, interupsi akan terjadi pada saat terjadi logika 0 pada
0 INT .
Dapat diakses secara bit (bit addressable)
A8h EA ES ET1 EX1 ET0 EX0
IE.7 IE.4 IE.3 IE.2 IE.1 IE.0
Gambar 2.15. Register IE (Nalwan, 2003)
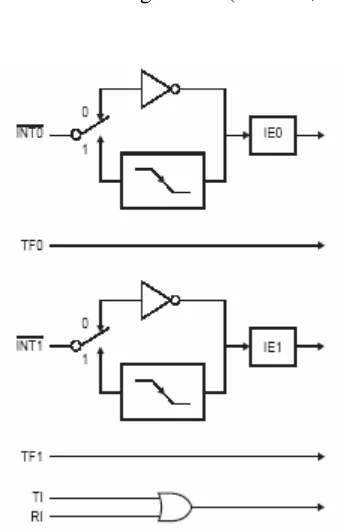
Gambar 2.16. Sumber interupsi (Atmel, 2001)
Interupsi eksternal INT dan 0 INT dapat dipilih dengan dua macam pilihan 1
aktivasi, yaitu: aktivasi tingkat (level-activated) atau aktivasi transisi (
transition-activated), yang tergantung dari pengesetan bit IT0 dan IT1 dalam register TCON, seperti
terlihat pada gambar 2.14. Pada gambar 2.16 terlihat bahwa tanda atau flag yang
sesungguhnya menghasilkan interupsi ini adalah bit-bit IE0 (TCON.1) dan IE1 (TCON.3)
yang juga terdapat dalam register TCON. Saat rutin layanan interupsi eksternal
dijalankan, mikrokontroler akan secara otomatis me-nol-kan tanda interupsi terkait
seandainya interupsi tersebut diaktivasi dengan keaktifan transisi. Jika interupsi tersebut
diaktivasi secara level atau tingkat, maka sumber eksternal-lah yang mengontrol tanda
2.7. Rangkaian Single Chip Microcontroller
VCC
11,0592 MHz 10uF/16V
33pF
X1 EA/VP
RESET
VCC
AT89S51
X2
8k2
33pF
Gambar 2.17. Rangkaian single chip microcontroller
Seperti terlihat pada gambar 2.17, rangkaian single chip microcontroller hanya
memerlukan sebuah osilator yang terdiri dari sebuah kristal dan dua buah kapasitor, serta
rangkaian reset yang terdiri atas sebuah resistor dan kapasitor. Pada rangkaian single chip,
kaki EA/VPPperlu dihubungkan ke Vcc untuk membuat akses awal mikrokontroler
berasal dari alamat 000H Flash PEROM. Apabila kaki EA/VPPterhubung ke ground
maka akses awal akan berasal dari alamat 000H memori eksternal (Nalwan, 2003).
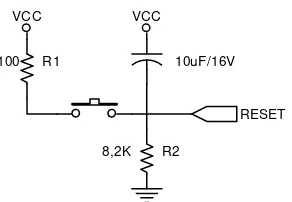
Sementara itu, untuk membuat rangkaian reset secara manual cukup ditambahkan
sebuah resistor dan tombol push-button seperti terlihat pada gambar 2.18. Saat saklar
ditekan, aliran arus akan mengalir dari VCC melalui R1 menuju ke kaki RESET. Tegangan
di kaki RESET atau VR2 akan bernilai (Nalwan, 2003):
CC
xV 2 R 1 R
2 R 2
VR
+
= (2.12)
Dengan memasukkan nilai-nilai resistor seperti tercantum pada gambar 2.18 pada
persamaan 2.6 maka tegangan VR2 saat saklar ditekan akan bernilai 4,94 volt dengan
VCC = 5 volt. Tegangan 4,94 volt pada kaki RST akan menyebabkan kaki ini berlogika 1
pada saat saklar tersebut ditekan. Saat saklar dilepas, aliran arus dari VCC memalui R1
akan terhenti dan tegangan pada kaki RST akan turun menuju ke nol sehingga logika pada
VCC
R1 100
RESET VCC
R2 8,2K
10uF/16V
Gambar 2.18. Rangkaian reset secara manual (Nalwan, 2003)
2.8. Remote Control
Salah satu cara untuk mengontrol peralatan secara remote namun masih berada
dalam area jarak padang adalah menggunakan cahaya infra merah. Infra merah
sebenarnya merupakan cahaya biasa dengan warna tertentu. Manusia tidak dapat melihat
warna dari sinar ini karena panjang gelombangnya berada dibawah spektrum cahaya
tampak. Meskipun manusia tidak dapat melihat cahaya infra merah yang diemisikan oleh
remote control namun tidak berarti cahaya tersebut tidak dapat dilihat. Kamera video atau
kamera foto digital dapat digunakan untuk menangkap sinar tersebut. (Bergmans, 2001)
Infra merah merupakan subjek yang sangat menarik dalam bidang pengontrolan
dan komunikasi. Hal ini dikarenakan ia mudah dihasilkan dan tidak mengalami
interferensi elektromagnetik. Namun sinar ini tidak begitu sempurna karena terdapat
begitu banyak benda yang dapat menghasilkan infra merah. Segala sesuatu yang dapat
menghasilkan panas dapat meradiasikannya, misalnya: matahari, lampu, oven, kompor,
mesin mobil, air panas, dan bahkan tubuh manusia dapat meradiasikan infra merah. Oleh
karena itu diperlukan suatu “kunci” supaya receiver dapat membedakan antara data
transmisi yang sesungguhnya dan noise-noise yang dihasilkan lingkungan di sekitarnya.
(Lipnharski, 2003)
Modulasi merupakan jawaban untuk mengatasi masalah tersebut. Dengan
modulasi, sumber sinar infra merah dibuat berkedap-kedip dengan frekuensi carrier
tertentu. Receiver-nya kemudian di-tuned dengan frekuensi yang sama sehingga ia akan
mengabaikan sinyal-sinyal yang lain. Frekuensi carrier yang dipakai biasanya antara 30 –
60 kHz. (Bergmans, 2001). Gelombang dengan frekuensi carrier ini kemudian digunakan
untuk merepresentasikan kode “1” dalam komunikasi digital. Sementara kode “0”
direpresentasikan dengan ketiadaan sinyal dari transmitter. Gambar 2.19 menunjukkan
Gambar 2.19. Pemodulasian sinyal infra merah (Bergmans, 2001)
2.8.1. SONY Remote Control
Untuk menghindari kemungkinan remote control dari suatu produsen elektronik
mengintervensi peralatan elektronik dari perusahaan lain maka setiap produsen elektronik
menggunakan protokol dan pengkodean yang berbeda satu dengan yang lain. Sehingga
meskipun mereka menggunakan frekuensi carrier yang sama, namun interferensi akan
dapat dihindari karena sistem pengkodeannya berbeda. (Lipnharski, 2003).
Sony menggunakan protokol SIRC (Serial Infra Red Control) yang menggunakan
teknik pengkodean lebar pulsa atau pulse-width codification. Pada pengkodean ini, pulsa
yang merepresentasikan logika “1” adalah rentetan gelombang carrier 40 kHz selama 1,2
milidetik, sementara lama rentetan untuk logika 0 adalah 0,6 milidetik. Semua bit
dipisahkan oleh interval diam selama 0,6 milidetik (Bergsman, 2003). Pengkodean lebar
pulsa SIRC Sony dapat dilihat pada gambar 2.20.
Gambar 2.20. Pengkodean lebar pulsa SIRC Sony (Bergsman, 2003)
Pada gambar 2.21 diperlihatkan urutan pulsa yang digunakan pada protokol SIRC.
Pada protokol ini LSB ditransmisikan terlebih dahulu. Start bit adalah rentetan
gelombang carrier selama 2,4 milidetik, diikuti interval diam selama 0,6 milidetik.
Kemudian dikirimkan 7-bit command, diikuti oleh 5-bit Device address. Seluruh rentetan
transmisi perintah akan diulang setiap 45 milidetik (diukur dari start ke start) selama
Gambar 2.21. Protokol SIRC Sony (Bergsman, 2003)
2.6.2. IR Receiver Module
Pada gambar 2.22 diperlihatkan diagram blok dasar sebuah receiver infra merah.
Sinyal transmisi infra merah diterima oleh photodiode infra merah pada bagian kiri
diagram blok. Sinyal yang diterima kemudian dikuatkan dan dibatasi pada dua blok
selanjutnya. Limiter bertindak sebagai rangkaian AGC (Auto Gain Control) untuk
mendapatkan level pulsa yang konstan berapapun jarak receiver dari transmitter. Dengan
adanya kapasitor maka hanya sinyal AC saja yang diteruskan ke BPF (Band Pass Filter).
BPF di-tuned pada frekuensi carrier remote control dan hanya akan melewatkan sinyal
dengan frekuensi yang sesuai. (Bergmans, 2001)
Gambar 2.22. Digram blok receiver infra merah (Bergmans, 2001)
Ketiga blok terakhir berfungsi untuk mendeteksi adanya frekuensi carrier. Jika
terdeteksi, maka output comparator akan ditarik ke logika “0”, demikian sebaliknya.
(Bergmans, 2001). Dari sini terlihat bahwa keluaran receiver adalah inverse atau
kebalikan dari data yang ditransmisikan oleh remote control.
2.9. Motor DC
Motor DC merupakan mesin listrik berputar yang didesain untuk bekerja
menggunakan sumber daya dari tegangan searah. Tipe dasar dari motor jenis ini adalah
motor DC magnet permanen. Bagian stator dari motor DC magnet permanen terdiri atas
dua atau lebih kutub magnet. Bagian rotor-nya terdiri dari atas lilitan-lilitan yang
dan magnet pada stator akan saling menarik dan menyebabkan rotor berputar sampai
sejajar dengan stator. Pada saat rotor mencapai kesejajaran, sikat pada motor akan
mengenai kontak pada komutator dan menginduksi lilitan berikutnya (Freescale
Semiconductor, 2004-2005).
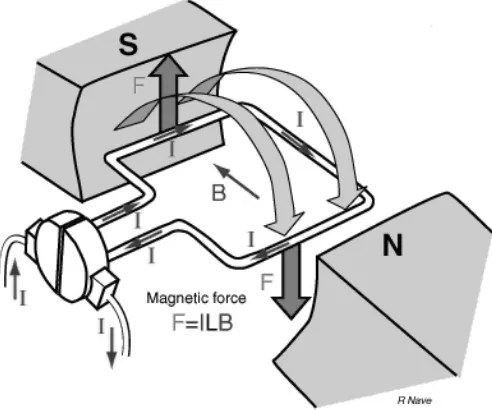
Prinsip kerja motor DC dapat dilihat pada gambar 2.23. Ketika arus listrik yang
dialirkan melalui kawat penghantar berada di dalam suatu medan magnet maka kawat
akan mengalami gaya magnet. Apabila kawat pengahantar tersebut berbentuk suatu
kalang (loop) maka kedua sisi dari kalang yang berada pada sudut yang tepat terhadap
arah medan magnet akan mengalami gaya yang saling berlawanan. Pasangan gaya yang
saling berlawanan tersebut akan menciptakan efek berputar atau torsi untuk memutar
lilitan. Komutator akan membalik arah arus kalang setiap setengah putaran untuk menjaga
supaya arah putar motor tetap sama (Nave, ---).
Gambar 2.23. Prinsip kerja motor DC (Nave, ---)
Dua tipe lain dari motor DC adalah motor DC kumparan seri dan motor DC
kumparan paralel. Motor-motor ini juga menggunakan rotor yang sama yakni memakai
sikat dan komutator. Namun, stator-nya menggunakan lilitan bukan magnet permanen.
Prinsip kerjanya tidak berbeda dengan motor sebelumnya. Motor DC kumparan seri
memiliki lilitan stator yang terhubung secara seri dengan rotor sedangkan motor DC
kumparan paralel mempunyai lilitan stator yang terhubung secara paralel dengan lilitan
mampu beroperasi sama baiknya menggunakan sumber tegangan DC ataupun AC
(Freescale Semiconductor, 2004-2005).
2.10. Penampil Seven-Segment
Penampil seven-segment merupakan suatu perangkat elektronik yang terdiri dari 7
buah LED yang tersusun sesuai pola-pola numeris atau alfa-numeris. Dengan
mengaktifkan LED-LED tertentu akan dapat dihasilkan tampilan angka atau huruf sesuai
yang dikehendaki. Sebagai kelengkapan, biasanya seven-segment juga dilengkapi dengan
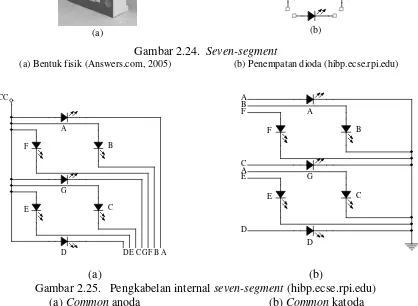
satu atau dua LED tambahan untuk menampilkan titik pecahan. (Answers.com, 2005).
Bentuk fisik dan penempatan dioda dalam seven-segment dapat dilihat pada gambar 2.24.
(a) (b)
Gambar 2.24. Seven-segment
(a) Bentuk fisik (Answers.com, 2005) (b) Penempatan dioda (hibp.ecse.rpi.edu)
D C
G
B
E
E VCC
A B A
F F
C
D G
D G C
E
B
A
E F B
A A
D F
C
(a) (b) Gambar 2.25. Pengkabelan internal seven-segment (hibp.ecse.rpi.edu)
Terdapat dua tipe seven-segment berdasarkan commonnya, yaitu: common anoda
dan common katoda (hibp.ecse.rpi.edu). Common anoda berarti kaki anoda dari
masing-masing LED dihubungkan menjadi satu dengan Vcc sementara kaki-kaki katoda
digunakan sebagai selektor LED yang akan diaktifkan. Kondisi keaktifan kaki katoda
pada common ini adalah aktif rendah. Sementara pada common katoda, kaki-kaki anoda
digunakan sebagai selektor sedangkan kaki katoda setiap LED dihubungkan ke ground.
Kondisi keaktifan kaki anoda pada common katoda ini adalah aktif tinggi. Diagram
pengkabelan common anoda dan common katoda seven-segment dapat dilihat pada
gambar 2.25.
2.11. Pulse Width Modulation
Untuk mengontrol kecepatan motor dc dibutuhkan sumber tegangan DC yang
dapat diubah-ubah. Misalkan sebuah motor 12 volt dihubungkan dengan catu daya maka
motor akan mulai berputar dan menambah kecepatan. Namun motor tidak dapat bereaksi
secara tiba-tiba dan memerlukan waktu untuk mencapai kecepatan penuh. Seandainya
daya ke motor diputus beberapa saat sebelum motor mencapai kecepatan penuh maka
kecepatannya akan menurun. Jika pensaklaran on-off ini dilakukan dengan cukup cepat
maka motor akan berputar diantara keadaan diam dan kecepatan penuh. Untuk
mengontrol kecepatan motor dilakukan dengan mengubah atau memodulasi lebar pulsa
on-off tersebut. Oleh karena itu, teknik ini disebut sebagai Pulse Width Modulation
(Torrens, 2004).
PWM atau Pulse Width Modulation juga merupakan suatu teknik untuk
mengontrol jumlah daya yang akan dikirimkan ke beban tanpa harus membuang atau
mendisipasi daya pada driver beban. PWM akan memungkinkan daya yang dikirimkan ke
beban adalah proporsional dengan prosentase waktu saat beban dinyalakan atau disebut
sebagai duty cycle. Persamaan untuk mendapatkan nilai duty cycle diperlihatkan pada
persamaan 2.13 (http//:Homepages.net, 2004).
Duty cycle =
OFF ON
ON
T T
T
+ (2.13)
Gambar 2.26 menunjukkan tiga sinyal PWM yang berbeda. Gambar 2.26(a)
total periode dan off selama 90% sisanya. Sementara gambar 2.26(b) dan 2.26(c)
memperlihatkan PWM dengan duty cycle 50% dan 90% (Barr, 2001).
Gambar 2.26. Sinyal PWM dengan duty cycle bervariasi (Barr, 2001)
2.12. Transistor sebagai saklar
Pada saat digunakan sebagai saklar, transistor biasanya dioperasikan pada kondisi
cutoff dan saturasi. Gambar 2.27 mengilustrasikan prinsip kerja transistor sebagai
peralatan pensaklaran. Pada gambar 2.27(a) transistor berada pada daerah cutoff karena
junction basis-emitornya tidak dibias maju. Pada kondisi ini, secara ideal antara kolektor
dan emitor terjadi open circuit seperti diilustrasikan oleh gambar saklar yang terbuka
(Floyd, 1996).
Gambar 2.27. Transistor NPN sebagai saklar pada kondisi ideal versi electron flow
(Floyd, 1996)
Pada gambar 2.27(b), transistor berada pada daerah saturasi karena junction
menyebabkan arus kolektor mencapai nilai saturasinya. Pada kondisi ini, secara ideal,
terjadi short antara kolektor dan emitor seperti diilustrasikan oleh saklar yang tertutup.
Sebenarnya, pada kolektor-emitor terjadi penurunan tegangan pada kisaran kurang dari 1
volt, yang disebut tegangan saturasi atau VCE(sat) (Floyd, 1996).
2.10.1. Kondisi Cutoff
Transistor berada pada kondisi cutoff ketika junction basis-emitor tidak dibias
maju. Dengan mengabaikan arus bocor, maka semua arus adalah nol, dan VCE sama
dengan VCC (Floyd, 1996). Hal ini diperlihatkan oleh persamaan 2.14.
VCE(cutoff) = VCC (2.14)
2.10.2. Kondisi saturasi
Transistor berada pada kondisi saturasi ketika junction basis-emitor dibias maju
dan terdapat arus basis yang cukup besar untuk memproduksi arus kolektor secara
maksimum (Floyd, 1996). Persamaan untuk mendapatkan arus kolektor saturasi
diperlihatkan pada persamaan berikut:
IC(sat) =
C ) sat ( CE CC
R V
V −
Seandainya IC(sat) diketahui maka untuk mencari nilai RC dapat dicari dengan
menggunakan persamaan 2.15.
) sat ( C
) sat ( CE CC C
I V V
R = − (2.15)
Untuk menjamin bahwa transistor benar-benar berada pada kondisi saturasi maka
IB harus jauh lebih besar dibandingkan IB(min) (Floyd, 1996). Persamaan untuk
mendapatkan IB(min) diperlihatkan pada persamaan 2.16.
DC ) sat ( C (min) B
I I
β
= (2.16)
Sedangkan untuk menentukan nilai RB dapat dicari dengan menggunakan
persamaan 2.17.
B RB B
I V
Rangkaian transistor PNP sebagai saklar memiliki persamaan yang sama dengan
transistor NPN. Perbedaan antara keduanya adalah pada arah arus yang mengalir yang
saling berkebalikan. Rangkaian saklar menggunakan transistor PNP diperlihatkan pada
gambar 2.28.
(a) (b) Gambar 2.28 Transistor PNP sebagai saklar pada kondisi ideal versi electron flow
(a) Saturasi – saklar tertutup (b) Cutoff – saklar terbuka
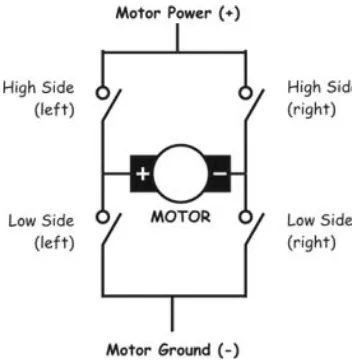
2.13. H-bridge
H-bridge atau biasa disebut full bridge, diberi nama demikian karena memiliki
empat buah saklar pada ujung kaki-kaki H, dan sebuah motor membentuk garis horisontal
sehingga menyerupai huruf H. Keempat saklar tesebut, apabila diurutkan menurut arah
berlawanan jarum jam, adalah high side left, high side right, low side right, dan low side
right. Supaya bekerja dengan benar, saklar-saklar tersebut harus dinyalakan secara
berpasangan, yaitu pasangan high-left dan low-right, atau low-left dan high-right.
Menyalakan kedua saklar pada kedua sisi kiri atau kanan yang sama adalah terlarang,
karena akan menyebabkan short circuit. (McManis, 2003). Rangkaian dasar sebuah
H-bridge diperlihatkan pada gambar 2.29.
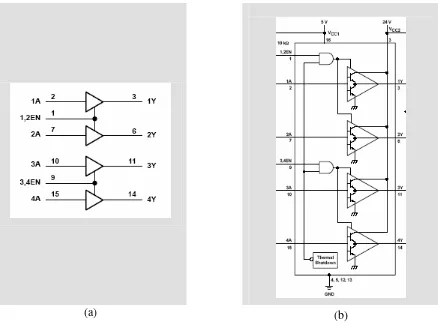
IC L293D merupakan quadruple high current half-H drivers. L293D didesain
untuk menghasilkan arus bidireksional sampai 600 mA pada rentang tegangan 4,5 V
sampai 36 V. IC ini didesain untuk men-drive beban induktif seperti relay, solenoida,
motor DC dan stepper, serta beban-beban lainnya. Driver motor ini diaktifkan secara
berpasangan, dengan driver 1 dan 2 di-enable oleh pin 1,2 EN dan driver 3 dan 4
di-enable oleh pin 3,4EN. Saat kondisi input enable adalah high, output mereka akan aktif
dan mengeluarkan pulsa dengan fase yang sama dengan input-nya. Apabila kondisi input
enable adalah low, output yang bersangkutan akan off dan berada pada kondisi
high-impedance (Texas Instrument, 2002).
(a) (b) Gambar 2.30 Diagram internal IC L293D (Texas Instrument, 2002)
(a) Simbol hubungan I/O (b) Rangkaian I/O internal
Dengan memberikan data input yang benar, setiap pasangan driver akan
membentuk jembatan H penuh atau full-H yang dapat digunakan untuk mengendalikan
arah putar motor secara bolak-balik. Selain itu, pada IC ini juga disediakan dua buah
power supply yang terpisah, masing-masing untuk power supply data TTL dan power
ditambahkan diode berkecepatan tinggi untuk meredam arus transient induktif. Tabel
kebenaran IC L293D dapat dilihat pada tabel 2.3, sementara diagram internalnya
ditunjukkan pada gambar 2.30 (Texas Instruments, 2002).
Tabel 2.3 Tabel kebenaran IC L293D untuk tiap driver
(Texas Instrument, 2002) Input
A EN
Output
Y
H H H
L H L
X L Z
BAB III
PERANCANGAN
Laser show pada dasarnya merupakan suatu hiburan yang dihasilkan dari manipulasi sinar laser untuk mendapatkan pola-pola geometris tertentu. Secara sederhana, hal ini dapat dilakukan dengan memantulkan sinar laser terhadap satu atau beberapa cermin yang berputar sebelum akhirnya dipantulkan ke dinding atau layar. Tampilan pada layar inilah yang kemudian dapat diamati sebagai pola-pola geometris.
Untuk menghasilkan berbagai variasi pola, terdapat tiga unsur yang harus diperhatikan, yang pertama adalah putaran cermin harus sedikit bergoyang. Tujuannya supaya terbentuk perbedaan sudut ketika sinar memantul. Hal ini dapat dicapai dengan menempelkan cermin ke motor dengan sudut kemiringan tertentu.
Unsur lainnya adalah putaran motor yang stabil namun tetap memberikan kemudahan dalam pengaturan kecepatan maupun arah putar. Variasi arah putar dan kecepatan ini akan menentukan banyak sedikitnya pola yang dapat dihasilkan.
Semakin luas range kecepatan motor maka semakin banyak pula pola yang dapat
terbentuk. Begitu pula apabila motor dapat berputar dua arah, CW dan CCW, maka polanya juga semakin banyak. Pengaturan kecepatan dan arah ini akan semakin mudah dan akurat apabila diatur secara digital dibanding secara analog.
Unsur terakhir adalah jumlah cermin. Semakin banyak media pemantulan maka kombinasi pola yang terbentuk juga semakin besar. Namun harus tetap diperhatikan bahwa semakin banyak jumlah cermin maka kemungkinan sinar tidak mengenai cermin ke-n juga semakin besar. Hal ini dikarenakan putaran cemin yang bergoyang akan menyebabkan pantulan sinar membentuk sudut dan akibatnya adalah luas daerah jatuh sinar menjadi semakin luas. Semakin banyak jumlah pantulan maka luas daerah tersebut juga semakin luas. Oleh karena itu perlu dicari jumlah cermin serta jarak antar cermin yang paling optimal.
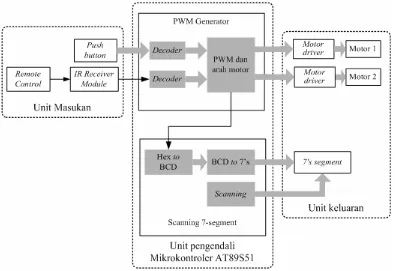
3.1. Diagram Kotak Digital Laser Show
Secara garis besar, perancangan digital laser show terdiri atas perancangan
penampil. Diagram kotak perangkat keras digital laser show dapat dilihat pada gambar 3.1.
Gambar 3.1. Diagram kotak digitallaser show
Unit masukan dari alat ini berupa tombol push-button dan remote control yang
digunakan untuk mengendalikan arah maupun kecepatan motor dc. Masing-masing motor akan memiliki tombol penaik kecepatan, tombol penurun kecepatan, dan tombol pengubah arah putaran.
Unit pengendali terdiri atas sebuah mikrokontroler AT89S51 yang mempunyai dua blok fungsi utama, yaitu: menghasilkan dua buah gelombang PWM secara
bersamaan, serta menampilkan PWM dan arah putar motor ke seven-segment. Blok
program pertama berisi metode untuk mendekodekan isyarat masukan, dan menghasilkan PWM dan arah putar motor yang sesuai dengan masukan tersebut.
Blok program kedua berisi kode untuk mengubah data PWM yang berformat
hex menjadi bentuk BCD (Binary Coded Decimal). Data berbentuk BCD ini
kemudian akan digunakan sebagai nilai indexed addressing untuk mencari kode-kode
numeris seven-segment pada look-up table. Kode-kode numeris inilah yang akan
ditampilkan ke penampil seven-segment menggunakan metode scanning.
Unit keluaran terdiri dari dua buah motor DC beserta driver-nya yang
berfungsi untuk menampilkan data persentase duty cycle dan arah putar masing-masing motor.
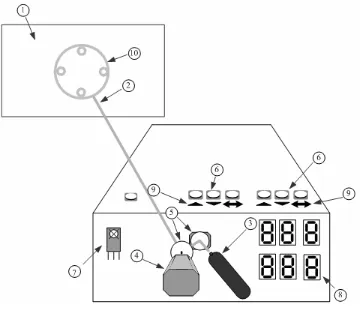
3.2. Konstruksi Digital Laser Show
Sebagai sarana pengaman, rangkaian elektronis perangkat digital laser show
akan dimasukkan ke dalam suatu kotak yang solid dan kokoh yang terbuat dari bahan isolator untuk mengurangi kemungkinan terjadinya kerusakan komponen serta
melindungi user dari kemungkinan tersengat arus listrik. Laser yang akan digunakan
merupakan laser pointer yang merupakan laser jenis He-Ne (Helium-Neon) berwarna
merah dengan panjang gelombang 0,663 mikron.
Piranti masukan berupa tombol-tombol push-button akan diletakkan di bagian
atas kotak untuk memudahkan pengontrolan, sementara piranti masukan lainnya yaitu
IR receiver module akan diletakkan di bagian dalam sisi depan kotak untuk
menangkap sinyal remote secara maksimal. Piranti penampil berupa seven-segment
juga akan diletakkan pada bagian dalam sisi depan kotak untuk memudahkan dalam
pengamatan data. Konstruksi digital laser show secara lengkap dapat dilihat pada
gambar 3.2. Fitur-fitur yang tersedia pada perangkat ini antara lain:
1. Pengontrolan kecepatan dan arah putar motor secara digital. Pengontrolan secara
digital akan memungkinkan pengontrolan yang lebih mudah dan sederhana, serta lebih presisi dibandingkan pengontrolan secara analog.
2. Pengontrolan kecepatan dan arah putar motor dapat dilakukan secara nirkabel
menggunakan remote control ataupun secara konvensional menggunakan tombol
push-button. Pengontrolan secara nirkabel akan memungkinkan user mengontrol dari kejauhan dan menikmati suguhan pola-pola pantulan yang dihasilkan dengan lebih santai dan nyaman. Selain itu pengontrolan jarak jauh juga relatif lebih aman karena akan mengurangi kemungkinan jatuhnya sinar laser ke mata yang berpotensi mengurangi kemampuan penglihatan. Pengontrolan secara nirkabel ini
dapat dilakukan dengan menggunakan remote control untuk TV Sony Triniton
yang banyak tersedia di pasaran.
3. Derajat kenaikan atau penurunan duty cycle PWM sebagai pengatur kecepatan
motor adalah sebesar 1% yang akan memberikan tingkat kepresisian yang cukup
tinggi, serta range kecepatan yang luas. Range kecepatan yang luas ini akan
yang semakin banyak. Hal ini pada akhirnya akan menyebabkan pola pantulan laser yang semakin banyak dan variatif.
Gambar 3.2 Layout digital laser show
Keterangan gambar:
1. Layar 6. Tombol push-button 2. Pantulan sinar laser 7. IR Receiver module 3. Laser pointer 8. Penampil seven-segment 4. Motor DC 9. Kode fungsi tombol 5. Cermin 10. Pola yang dihasilkan
4. Kemampuan untuk mengatur arah putar motor. Kemampuan motor untuk berputar
dua arah, yaitu searah (CW) dan berlawanan (CCW) arah jarum jam juga akan menyebabkan pola pantulan laser yang semakin banyak dan variatif.
5. Sarana penampil yang cukup terang dan jelas meskipun dilihat dari kejauhan
karena menggunakan displayseven-segment, bukan LCD.
6. Desain keseluruhan yang kompak dan portable sehingga memudahkan untuk
3.3. Input Interface
Untuk memberikan keleluasaan dan kenyamanan dalam mengoperasikan
perangkat digital laser show ini maka disediakan dua teknik pemberian masukan yang
dapat digunakan sesuai keinginan user. Kedua teknik tersebut adalah pengontrolan
menggunakan tombol push-button yang terpasang secara on-board,serta pengontrolan
secara nirkabel atau remote menggunakan remote control.
3.3.1. Pengontrolan Menggunakan Tombol Push-button
Teknik pengontrolan ini digunakan untuk mengontrol kecepatan motor dari
jarak dekat. Tombol-tombol push-button terhubung secara langsung (wired) dengan
mikrokontroler yang terhubung dengan driver motor. Setiap motor akan dilengkapi
dengan tiga buah push-button yang masing-masing berfungsi untuk menaikkan
kecepatan, menurunkan kecepatan, dan mengubah arah putaran motor.
Setiap penekanan tombol penaik atau penurun kecepatan akan menaikkan atau menurunkan PWM sebesar 1%. Sementara setiap penekanan tombol pengubah arah
putaran akan mengubah atau men-toggle arah putaran dari clock wise (CW) menjadi
counter clock wise (CCW), atau sebaliknya. Tombol-tombol ini dihubungkan dengan
port 0 mikrokontroler yang akan difungsikan sebagai port input, serta akan
dihubungkan dengan external interupt 0 (INT ) setelah saling di-AND-kan. 0
Rangkaian antara tombol dengan mikrokontroler dapat dilihat pada gambar 3.3.
R23 R20 R18 10k SW1 SW3 AT89S51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 SW2 R19 R22 VCC SW4 SW5 R21 SW6
Masing-masing tombol juga akan diberi R pull-up yang terhubung ke Vcc
sehingga logika port pada saat kondisi tombol idle (tidak ditekan) adalah “1”. Pada
saat tombol ditekan maka arus akan mengalir ke