Rancang Bangun Sistem Perkir Valet Otomatis Menggunakan Robot Line Follower - Repositori UIN Alauddin Makassar
Teks penuh
Gambar

Dokumen terkait
Dimana robot leader sebagai pemandu line tracer yang dipasang sensor pemancar dibelakang robot dan robot follower dipasang sensor phototransitor sebagai
Pada tahap analisa dan perancangan ini yang akan dilakukan adalah analisa robot brankar line follower menggunakan threshold yaitu meliputi analisa sensor pembaca garis yaitu
Robot line follower atau robot pengikut garis adalah suatu jenis robot yang pergerakannya dengan mendeteksi garis sehingga robot tersebut dapat melakukan
Dengan bentuk rute di atas, dapat dikatakan bahwa mobil akan berhenti jika hanya sensor garis kiri terluar dan kanan terluar yang aktif sedangkan yang lain tidak aktif, berikut
menu tombol. Gambar 3.2 Diagram Blok Sistem.. TUGAS AKHIR RANCANG BANGUN ROBOT... HENDRIK JUNAEDI Prinsip kerja sensor garis adalah transmitter memancarkan cahaya yang akan
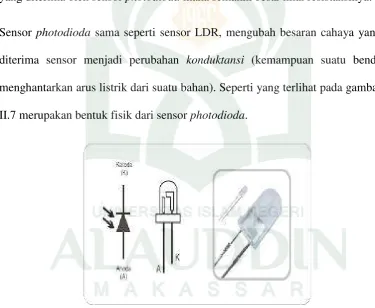
Cara kerja dari sistem robot line follower secara umum ialah dimulai dari pembacaan lintasan atau garis oleh sensor photodiode berserta LED yang mana intensitas pantulan
Robot line follower atau robot pengikut garis adalah suatu jenis robot yang pergerakannya dengan mendeteksi garis sehingga robot tersebut dapat melakukan
SENSOR WARNA POT SENSOR WARNA GARIS BRICK LEGO MINDSTORMS EV3 LCD MOTOR MEDIUM DRIVER MOTOR B DRIVER MOTOR C MOTOR C MOTOR B Gambar 2.2 Blok Diagram Robot LEGO
