I. Latar Belakang dan Perumusan Masalah
Bagian ini membahas konteks perkembangan teknologi otomatisasi, khususnya penggunaan mikrokontroler dalam kendaran otomatis. Penulis memaparkan motivasi di balik pembuatan prototipe mobil otomatis yang mampu membedakan warna rambu lalu lintas, menekankan pada efisiensi, kecepatan, dan akurasi yang menjadi tuntutan teknologi modern. Perumusan masalah difokuskan pada bagaimana merancang simulasi mobil yang dapat mengikuti jalur yang telah ditentukan dan mengenali rambu lalu lintas berdasarkan warna, serta bagaimana mengimplementasikannya secara praktis. Bagian ini penting untuk memberikan pondasi dan arah penelitian, sehingga relevan dengan tujuan pembelajaran untuk memahami problem-solving dan perumusan hipotesis.
1.1 Latar Belakang
Sub-bab ini menjelaskan konteks penelitian yang didasarkan pada perkembangan pesat ilmu pengetahuan dan teknologi, khususnya otomatisasi. Penulis menjabarkan peran mikrokontroler sebagai solusi teknologi untuk menciptakan sistem yang otomatis, cepat, akurat, dan efisien. Motivasi penulis dalam mengaplikasikan mikrokontroler pada mobil otomatis dijelaskan secara rinci, yang menekankan pada kebutuhan akan otomatisasi dalam mengemudi, termasuk kemampuan membaca rambu lalu lintas secara otomatis. Pembahasan ini relevan untuk membangun pemahaman mahasiswa tentang penerapan teknologi terkini dalam menjawab kebutuhan masyarakat.
1.2 Perumusan Masalah
Sub-bab ini secara spesifik menjabarkan pertanyaan penelitian. Dua masalah utama dirumuskan: bagaimana membuat simulasi mobil yang dapat mengikuti jalur yang telah ditentukan dan bagaimana membuat simulasi mobil yang dapat mengenali rambu lalu lintas dan mengambil tindakan yang tepat. Rumusan masalah ini terstruktur dengan baik dan mengarahkan penelitian secara spesifik, mengajarkan mahasiswa bagaimana merumuskan masalah penelitian yang terukur dan dapat diteliti. Bagian ini juga sangat penting untuk mahasiswa dalam memahami bagaimana merumuskan pertanyaan penelitian yang terarah dan terukur.
1.3 Batasan Masalah
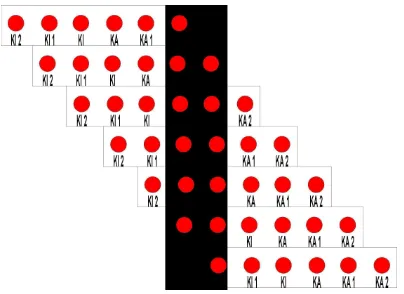
Sub-bab ini membatasi ruang lingkup penelitian untuk menghindari penyimpangan dari fokus utama. Pembatasan meliputi jenis rambu lalu lintas yang dikenali (merah, kuning, hijau), penempatan rambu (di dasar lintasan), dan bahasa pemrograman yang digunakan (bahasa C). Batasan masalah ini penting untuk menjaga agar penelitian tetap terfokus dan terkelola, hal ini penting untuk mengajarkan mahasiswa pentingnya menentukan ruang lingkup penelitian yang realistis dan terukur.
1.4 Tujuan
Sub-bab ini menjelaskan tujuan penelitian secara eksplisit. Tujuan utamanya adalah untuk mengetahui kemungkinan pembuatan mobil otomatis yang dapat melaju di jalur yang tepat dan mengenali rambu lalu lintas serta melakukan tindakan yang sesuai. Tujuan ini terukur dan terarah, mengajarkan mahasiswa pentingnya merumuskan tujuan penelitian yang jelas dan spesifik sebagai acuan keberhasilan.
1.5 Manfaat
Sub-bab ini menjelaskan manfaat praktis dan teoritis dari penelitian. Manfaat praktis meliputi informasi tentang penggunaan mikrokontroler dalam otomatisasi kendaraan, sementara manfaat teoritis meliputi sumbangan sebagai landasan teori untuk penelitian selanjutnya. Pembahasan manfaat ini penting untuk menekankan relevansi dan dampak penelitian, sehingga relevan dengan tujuan pembelajaran untuk memahami pentingnya kontribusi penelitian.
1.6 Metodologi Penelitian
Sub-bab ini menjelaskan metode penelitian yang digunakan, meliputi studi literatur, desain sistem (mekanik, elektronik, dan perangkat lunak), pembuatan prototipe, dan pengujian. Langkah-langkah metodologi ini terstruktur dan sistematis, mengajarkan mahasiswa tentang proses penelitian yang benar dan terencana, serta pentingnya dokumentasi setiap tahapan penelitian. Mengajarkan mahasiswa tentang perencanaan penelitian yang matang dan terstruktur.
II. Tinjauan Pustaka
Bagian ini memberikan landasan teori yang relevan dengan topik penelitian. Topik yang dibahas meliputi teori robot, khususnya robot line follower dan kinematika robot mobile. Penjelasan rinci tentang komponen-komponen robot line follower (sensor proximity, komparator, roda, motor DC), mikrokontroler ATMega8535 (spesifikasi dan fungsi pin), dan komponen elektronik pendukung (resistor, dioda, transistor, optocoupler) diberikan. Bagian ini penting untuk menunjukkan penguasaan literatur dan relevansinya dengan penelitian. Bagian ini penting untuk menunjukkan penguasaan literatur dan bagaimana mengaplikasikan teori ke dalam praktik penelitian.
2.1 Tinjauan Tentang Robot
Sub-bab ini memberikan definisi dan klasifikasi robot secara umum, termasuk sejarah perkembangannya. Dipaparkan juga konsep Autonomous Mobile Robot (AMR) dan teori kinematika robot mobile sebagai dasar pemahaman pergerakan robot. Pembahasan ini memberikan konteks yang luas tentang robot, yang sangat penting bagi mahasiswa untuk memahami perkembangan dan prinsip dasar teknologi robot.
2.1.1 Teori Kinematika Pergerakan Robot
Sub-bab ini menjelaskan konsep kinematika dalam pergerakan robot, termasuk transformasi koordinat dan analisis pergerakan robot mobile. Penjelasan tentang kinematika diferensial dalam robot mobile (DDMR) diberikan untuk memahami pergerakan robot secara matematis. Ini relevan untuk tujuan pembelajaran, yaitu memahami prinsip kerja robot mobile dan bagaimana mengaplikasikan ilmu matematika dalam sistem kendali.
2.1.2 Robot Line Follower
Sub-bab ini membahas secara detail tentang robot line follower, termasuk komponen-komponennya (body/chassis, sensor proximity, rangkaian komparator, roda, dan motor DC). Penjelasan rinci tentang sensor proximity (LED dan photodioda) dan cara kerjanya diberikan. Pembahasan ini relevan untuk mahasiswa dalam memahami prinsip kerja sensor dan cara penerapannya dalam robot line follower.
2.2 Microcontroller ATMega8535
Sub-bab ini memberikan penjelasan detail tentang mikrokontroler ATMega8535, termasuk spesifikasi, fungsi pin, dan modul-modul yang dimilikinya (timer/counter, ADC, USART, SPI, TWI). Penjelasan ini sangat penting untuk memahami arsitektur dan fungsionalitas mikrokontroler yang digunakan dalam penelitian, serta kemampuan pemrogramannya. Mahasiswa akan memahami spesifikasi dan kegunaan mikrokontroler ATMega8535, yang krusial untuk implementasi proyek.
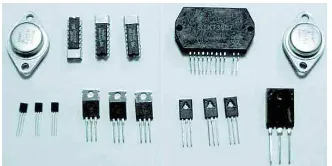
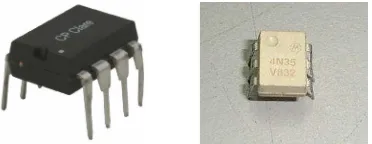
2.3 Komponen-Komponen Elektronik
Sub-bab ini menjelaskan komponen elektronik yang digunakan dalam prototipe, termasuk resistor (fixed, variable, dan non-linier), dioda, transistor, dan optocoupler. Penjelasan ini memberikan pemahaman tentang fungsi dan karakteristik masing-masing komponen, yang sangat penting untuk memahami rangkaian elektronik dalam prototipe. Mahasiswa akan memahami karakteristik dan fungsi masing-masing komponen elektronik, sehingga bisa menganalisis dan merancang rangkaian.
III. Rancang Bangun Prototype
Bagian ini menjelaskan proses perancangan prototipe mobil otomatis, meliputi perancangan elektronik, mekanik, dan perangkat lunak. Penjelasan rinci tentang rancangan sensor garis dan komparator, sensor warna, driver motor, dan mekanik mobil diberikan. Diagram blok, skema rangkaian, flowchart, dan tabel kebenaran disajikan untuk memperjelas proses kerja. Bagian ini penting untuk memahami proses implementasi teori ke dalam bentuk fisik. Bagian ini menunjukkan penerapan teori yang sudah dibahas sebelumnya menjadi prototipe nyata.
3.1 Perancangan Mobil Otomatis
Sub-bab ini menjelaskan konsep desain mobil otomatis, termasuk tujuan dan spesifikasi. Penulis memaparkan rancangan fungsional mobil, mencakup kemampuan mengikuti jalur, mendeteksi warna rambu lalu lintas, dan melakukan manuver di persimpangan. Ini penting untuk menunjukkan perencanaan proyek secara menyeluruh dan terintegrasi.
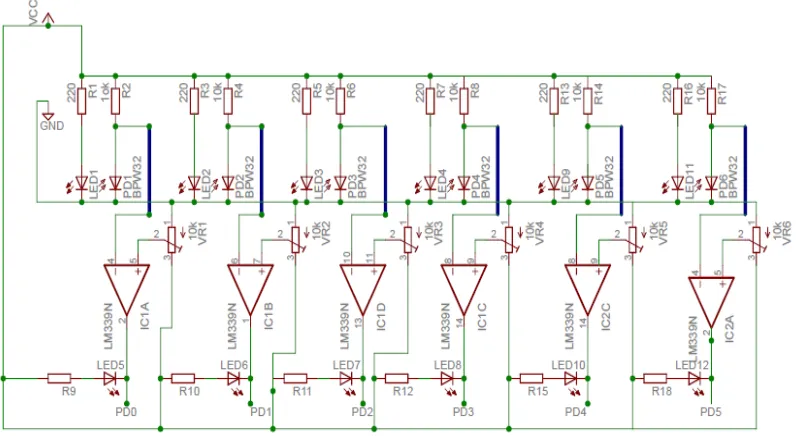
3.2 Perancangan Elektronik
Sub-bab ini menjelaskan secara rinci desain rangkaian elektronik, termasuk sensor garis dan komparator, sensor warna, dan driver motor. Skema rangkaian dan flowchart proses kerja disertakan. Penjelasan ini penting untuk memahami bagaimana sistem elektronik bekerja dan bagaimana mengintegrasikan berbagai sensor dan aktuator.
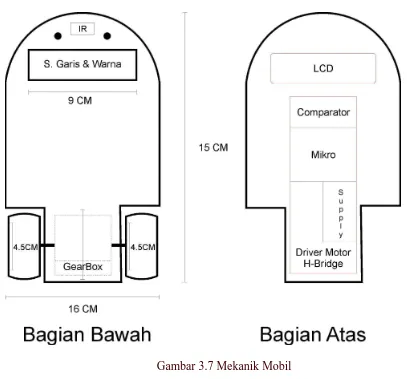
3.3 Perancangan Mekanik
Sub-bab ini menjelaskan desain fisik mobil, termasuk dimensi, material, dan penempatan komponen elektronik. Gambar rancangan mekanik disertakan untuk memberikan gambaran visual. Ini penting untuk memahami bagaimana perancangan elektronik diintegrasikan dengan struktur fisik mobil.
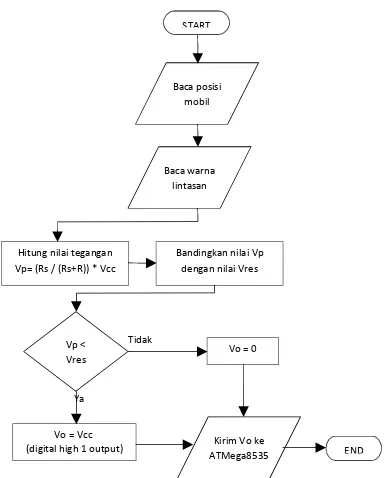
3.4 Perancangan Perangkat Lunak
Sub-bab ini menjelaskan desain perangkat lunak yang mengendalikan mobil, termasuk bahasa pemrograman (bahasa C) dan algoritma yang digunakan. Flowchart program disertakan untuk memperjelas logika pengolahan data dan kendali motor. Ini penting untuk memahami bagaimana program mengontrol sistem secara keseluruhan.
IV. Implementasi dan Pengujian
Bagian ini menjelaskan proses implementasi dan pengujian prototipe. Penjelasan tentang kebutuhan perangkat keras dan lunak, serta proses pemrograman menggunakan CodeVision AVR diberikan. Potongan kode program disertakan untuk memberikan gambaran tentang implementasi algoritma. Bagian ini penting untuk menunjukkan proses implementasi dan verifikasi hasil penelitian. Bagian ini menunjukkan proses implementasi dan pengujian yang dilakukan untuk memvalidasi hasil penelitian.
4.1 Kebutuhan Perangkat Sistem
Sub-bab ini mencantumkan kebutuhan perangkat keras dan lunak yang diperlukan untuk pengembangan dan pengujian prototipe. Daftar perangkat keras dan lunak yang lengkap disertakan. Ini penting untuk memastikan reproduksibilitas penelitian.
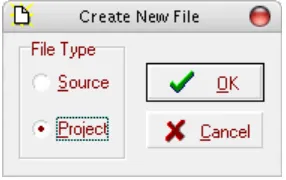
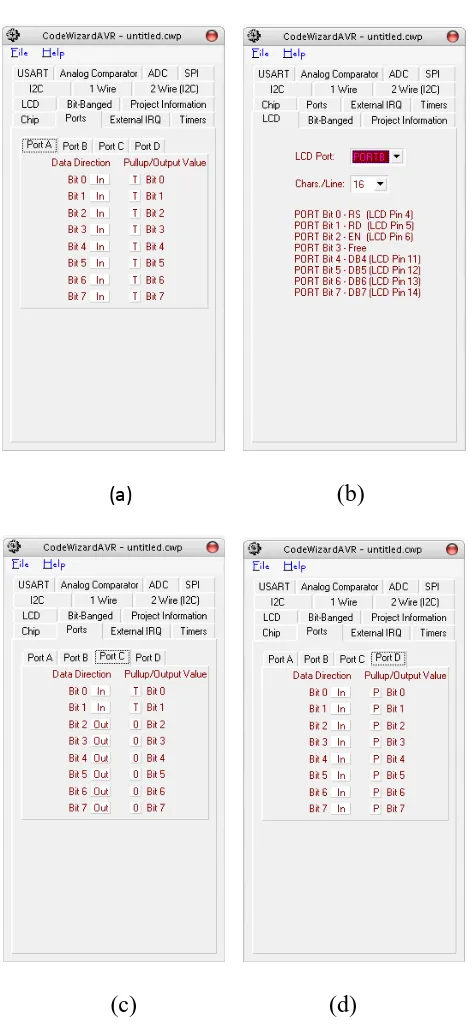
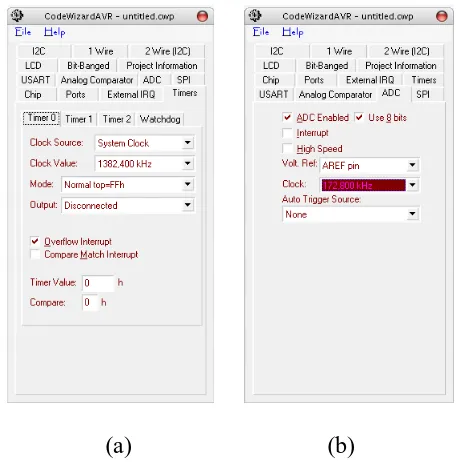
4.2 Implementasi Pemrograman
Sub-bab ini menjelaskan langkah-langkah pemrograman menggunakan CodeVision AVR, termasuk konfigurasi port dan modul mikrokontroler. Potongan kode program disertakan untuk memberikan contoh implementasi algoritma. Ini penting untuk menunjukkan proses implementasi program dan bagaimana program tersebut dijalankan.