2. 1.Tinjauan Tentang Robot
Istilah robot diperkenalkan oleh seorang penulis bernama Karel Capek yang menggunakan istilah robot yang berarti boneka / pekerja yang bisa bekerja secara mandiri, pada kisah yang ditulisnya di tahun 1921. [3]
Sementara itu, cikal bakal teknologi robot sudah dikembangkan sejak abad 18, seperti Jacques de Vaucanson di tahun 1738, yang membuat bebek mekanik yang dapat memakan dan mencincang biiji bijian, membuka dan menutup sayapnya. Tahun 1796, Tanaka Hisashige di Jepang berhasil membuat mainan mekanik yang dapat menghidangkan teh dan menulis huruf kanji. Tahun1926, Nikola Tesla membuat perahu bot yang dapat dikontrol dengan radio. Tahun 1948, William Grey Walter membuat robot elektronik otomatis pertama dimana robot ini dapat me-respons cahaya dan dapat melakukan kontak dengan objek dari luar. Tahun 1954, saat dimulainya zaman digital, sebuah robot digital yang dapat deprogram ditemukan oleh George Devol.
Selain Karel Capek yang menggunakan istilah robot sebagai boneka / pekerja, ada juga Webster’s Dictionary yang mendefinisikan robot sebagai perangkat otomatis yang membantu fungsi-fungsi menyerupai manusia. Sistem kelas dalam robot mengelompokkan Autonomous Mobile Robot (AMR) sebagai salah satu tahapan paling penting dalam tahap evolusi intelegensi dan struktur
robot. Robot diberi kemampuan khusus untuk berpindah tempat atau bergerak dengan alat gerak konvensional seperti kaki atau roda.
Kata “autonomi” dapat diartikan sebagai kemampuan diri untuk mengambil tindakan pada perubahan situasi atau kemampuan untuk mengambil keputusan tanpa campur tangan manusia. Kemampuan autonomi robot pada dasarnya dikendalikan oleh operator, meskipun pada beberapa operasi lain dapat direncanakan, dikontrol dan dikerjakan tanpa campur tangan manusia itu sendiri.
Menurut klasifikasinya robot dapat dibagi menjadi 4, yaitu :
1. Robot Non Mobile
Robot Non Mobile merupakan type robot yang tidak dapat bergerak, kebanyakan robot jenis ini digunakan di dalam industri.
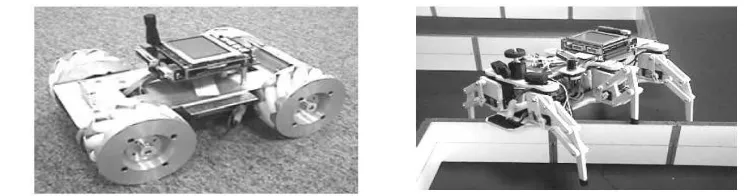
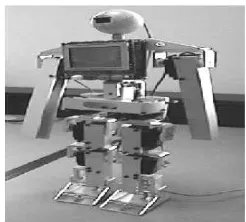
2. Robot Mobile
Robot ini memiliki fungsi untuk dapat bergerak atau berpindah tempat, pada awal perkembangannya robot mobile menggunakan roda untuk dapat berpindah tempat, namun saat ini telah muncul berbagai teknologi yang dapat mendukung robot mobile untuk berpindah tempat, salah satunya adalah hexapod, memiliki kaki seperti laba – laba yang dapat bergerak lebih flexible. Berikut ini beberapa contoh robot mobile:
3. Humanoid, Animaloid, extra ordinary
Robot jenis ini sangat banyak digunakan saat ini karena memiliki fungsi yang menyerupai manusia / hewan sehingga sangat bermanfaat untuk menyelesaikan pekerjaan manusia yang mengharuskan tingkat keakuratan tinggi.
Secara garis besar robot jenis ini dapat diklasifikasikan sebagai berikut: a. Humanoid
Robot yang memiliki bentuk fisik menyerupai manusia. b. Android
Robot yang menyerupai laki – laki baik sifat, perasaan juga anggota tubuh. c. Cyborg
Robot yang tidak menyerupai manusia tetapi memiliki fungsi seperti manusia. d. Gynoid
Berasal dari kata gyne, yang berarti wanita. Robot ini sama seperti Android, hanya saja Gynoid berjenis kelamin wanita
e. A.I
Robot yang mempunyai kecerdasan dan fungsi seperti manusia / hewan f. Disabled Robotic
Robot yang diciptakan untuk membantu orang yang kekurangan secara fisik. g. Domotics
Transformasi
Terdapat dua metode analisa untuk menganalisis pergerakan robot, yaitu analisa kinematika dan analisa dinamik. Pada bab ini penulis hanya akan
Konsep kinematik didasarkan pada diagram system control robotik yang dijelaskan pada Gambar 2.3
Pada gambar 2.3 di atas, output ( ) yang diukur dari gerakan robot adalah dalam domain sudut dari sendi – sendi, baik sendi pada system tangan/kaki ataupun sudut dari perputaran roda jika robot adalah robot mobile. Sedang yang diperlukan oleh user adalah posis (titik tertentu pada bagian robot) yang dinyatakan sebagai koordinat 2D ataupun 3D (Ruang Cartesian). Dengan demikian diperlukan transformasi koordinat antara ruang kerja Cartesian dengan ruang sendi / sudut. Kombinasi antara transformasi koordinat P ke dengan controller G(s) disebut sebagai controller kinematik. Inputnya berupa sinyal P,ep
dan outputnya berupa sinyal kemudi U. Dalam konteks praktis, sinyal U ini adalah sinyal – sinyal analog dari DAC untuk seluruh aktuator (variable sendi) robot
Jadi, kinematik dalam robot adalah suatu bentuk pernyataan yang berisi tentang deskripsi matematik geometri dari suatu struktur robot. Dari persamaan kinematik dapat diperoleh hubungan antara konsep geometri ruang sendi pada robot dengan konsep koordinat yang biasa dipakai untuk menentukan kedudukan dari suatu objek. Dengan model kinematik, programmer dapat menentukan konfigurasi referensi input yang harus diumpankan ke tiap actuator agar roboot dapat melakukan gerakan dimultan (seluruh sendi) untuk mencapai posisi yang dikehendaki. [1]
B. Kinematik robot mobile
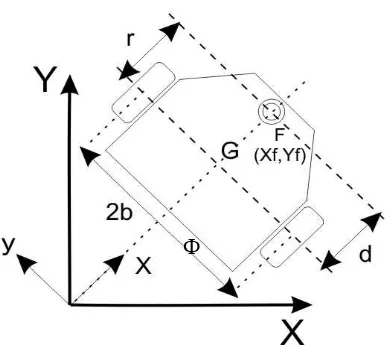
Gambar 2.4 DDMR pada medan 2D Cartesian
Robot diasumsikan berada dalam kawasan 2D pada koordinat Cartesian XY. Parameter – parameter dalam gambar adalah :
Ф : sudut arah hadap robot
2b : lebar robot yang diukur dari garis tengah roda ke roda r : jari – jari roda (rodakiri dan kanan sama sebangun) d : jarak antara titik tengah antaran 2 roda, G dengan titik F (x,y) : koordinat acuan di tubuh robot terhadap sumbu XY
Dalam kajian kinematik ini robot diasumsikan bergerak relative pelan dan roda tidak slip terhadap permukaan jalan. Maka komponen x dan y dapat diekspresikan dalam suatu persamaan nonholonomic sebagai berikut :
XG sin Ф – YG cos Ф = 0 ……….. (2.1)
Pada DDMR ada variable F yang digunakan sebagai acuan analisa, sehingga persamaan di atas menjadi :
XF sin Ф – YF cos Ф + Фd = 0 ………….…. (2.2)
Masalah klasik dalam control kinematik DDMR adalah bahwa DDMR memiliki dua actuator, namun parameter kontrolnya lebih dari dua, yaitu x untuk gerakan ke arah X dan y untuk arah Y yang diukur relative terhadap perpindahan titik G, dan gerakan sudut hadap Ф yang diukur dari garis hubung titik G dan F terhadap sumbu X.
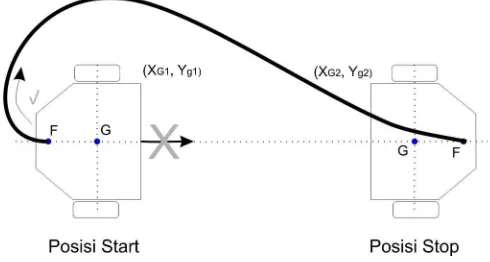
Dari rumus 2.2 nampak bahwa derajat kebebasan dalam control kinematika DDMR berjumlah tiga, yaitu (x, y, Ф) karena ketiga parameter ini perlu dikontrol secara simultan untuk mendapatkan gerakan nonholomonic. Untuk lebih jelasnya dapat dilihat pada gambar 2.5
Gambar 2.5 Contoh Manuver DDMR
Perpindahan kedudukan robot dari Start ke Stop bila dipandang pada titik G adalah perpindahan dari koordinat (XG1. YG1) ke (XG2, YG2) secara translasi.
Namun hal ini tidak dapat dilakukan secara langsung sebab robot harus bergerak maju sehinggan ia harus membuat maneuver belok untuk mengarahkannya pada koordinat (XG2, YG2). Oleh karena itu diperlukan titik acuan F yang berada di luar
garis yang menghuungkan kedua roda agarsudut hadap dapat dihitung.
XF
YF = TNH atau q (t) = TNH (q) (t) ………. (2.3)
ФF
TNH adalah matriks transformasi nonholomonic, L dan R adalah
kecepatan radial roda kiri dan kanan, dan q adalah system koordinat umu robot.
2. 1. 2.Robot Line Follower
Robot Line Follower adalah suatu robot yang dirancang / dibuat menyerupai mobil, dan cara kerjanya ialah robot tersebut akan mengikuti garis hitam / putih secara otomatis dimana pengendalinya berupa sensor-sensor dan selanjutnya akan dieksekusi oleh komparator berupa transistor-transistor dilanjutkan ke motor-motor yang membuat robot bisa bekerja sabagai mana mestinya. [4]
A. Bagian – Bagian Robot Line Follower
1. Body / Chasis
Body ini berguna sebagai tempat penyimpanan komponen – kompnonen yang akan digunakan nantinya. Body ini juga sangat penting karena dapat mempengaruhi kinerja robot yang akan dibuat.
2. Sensor Proximity
Sensor proximity adalah sensor untuk mendeteksi ada atau tidaknya suatu obyek. Dalam dunia robotika, sensor proximity seringkali digunakan untuk mendeteksi ada atau tidaknya suatu garis pembimbing gerak robot atau lebih dikenal dengan istilah “Line Follower Robot “ atau “Line Tracer Robot”, juga
L
biasa digunakan untuk mendeteksi penghalang berupa dinding atau penghalang lain pada Robot Avoider. Jenis sensor proximity ini ada beberapa macam, seperti ultrasonic proximity, proximity (infra merah), kamera dan lain sebagainya.
Sensor proximity yang digunakan untuk robot line follower dibuat menggunakan pasangan LED / Infrared dan phototransistor / photodioda. Jika sensor berada diatas garis hitam maka photodioda akan menerima sedikit cahaya pantulan. Tetapi jika sensor berada diatas garis putih maka photodioda akan menerima banyak cahaya pantulan, hal ini dapat dilihat pada gambar 2.5. Sifat dari photodioda adalah jika semakin banyak cahaya yang diterima, maka nilai resistansi diodanya semakin kecil. Sehingga bila sensor berada di atas garis hitam maka cahaya LED akan memantul pada garis dan diterima oleh photodioda kemudian photodioda menjadi on sehingga tegangan output akan mendekati 0 volt. Sebaliknya jika sensor berada di atas garis putih yang berarti tidak terdapat pantulan cahaya maka photodioda tidak mendapat arus bias sehingga menjadi off, dengan demikian tegangan output sama dengan tegangan Induk (Vcc).
Gbr 2.6 Prinsip kerja sensor proximity Berikut ini bagian-bagian dari photodiode :
A. LED
produk temuan lain yang cara kerja serta strukturnya sama dengan dioda, LED akan melepaskan sebuah dioda berbentuk cahaya apabila diberikan tegangan maju. Jika terintegrasi pada sebuah rangkaian LED hendaknya diberikan penahan arus (resistor) pada anoda (sumbu positif) guna mencegah kerusakan serta membatasi kuat arus maju yang dikonsumsi.
B. Photodioda
Merupakan salah satu jenis variabel resistro type LDR, yaitu jenis resistor non linier yang nilai hambatannya terpengaruh oleh intensitas cahaya yang mengenainya. Makin besar intensitas cahaya yang mengenainnya makin kecil nilai hambatannya. Umumnya photodioda memiliki resistansi sebesar 150K , resistansi ini akan berkurang sesuai dengan warna yang dikenainya. Sedangkan untuk tegangan yang dikeluarkan dapat dicari dengan menggunakan rumus 2.4.
Vp = Rs / (Rs + R) * Vcc ………... (2.4) Keterangan :
Vp : Tegangan Photodioda Rs : Resistansi Photodioda R : Resistansi Resistor Vcc : Supply
Nilai tegangan inilai yang nantinya akan dikirimkan ke rangkaian
comparator untuk kemudian dibandingkan dengan tegangan threshold (variable
3. Rangkaian Komparator
Rangkaian Komparator adalah bagian robot yang berupa rangkaian yang berfungsi sebagai pengeksekusi hasil output dari sensor proximity yang selanjutnya akan dilanjutkan ke motor - motor DC.
Rangkaian komparator ini sangat penting karena output dari sensor proximity masih memiliki kemungkinan tidak pada kondisi ideal bila intensitas pantulan cahaya LED pada garis lemah, misalnya karena perubahan warna atau lintasan yang kotor.
Cara kerja rangakain komparator ini adalah membandingkan output sensor proximity dengan suatu tegangan threshold yang dapat diatur dengan memutar trimmer potensio (variable resistor). Jika tegangan dari threshold lebih besar dari tegangan output proximity maka keluaran dari comparator akan bernilai 1 (High Digital Output).
Karena rangkaian comparator ini bekerja dengan cara membandingkan tegangan output proximity dengan threshold maka kita juga harus mengetahui besarnya tegangan threshold yang dibutuhkan, untuk mencari nilai tegangan threshold yang dibutuhkan maka dicari nilai rata-rata dari output-output photodiode pada sensor proximity. [5]
Vref = (Vp1+Vp2) / 2 ……….. (2.5)
Keterangan :
Vref : tegangan threshold
Untuk mengetahui hasil dari sensor, alangkah baiknya diberi lampu
indicator yang disambungkan dengan output dari komparator.
4. Roda
Roda ini berfungsi sebagai penopang body dan juga berfungsi agar robot yang dibuat dapat berjalan sesuai dengan yang diinginkan.
Bagian – bagian dari roda adalah A. Motor DC
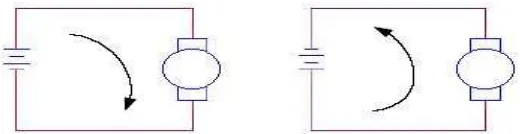
Motor DC adalah motor arus searah yang memiliki kemampuan untuk mengubah besaran listrik menjadi gerak. Motor DC memiliki dua buah terminal
input. Pemberian beda tegangan pada kedua terminal input tersebut akan menyebabkan motor berputar ke satu arah. Jika polaritas dari tegangan input
dibalik maka arah putaran dari motor tersebut akan berubah, secara sederhana dapat dilihat pada gambar 2.7
Gambar 2.7 Dasar Pengaturan Arah Motor DC
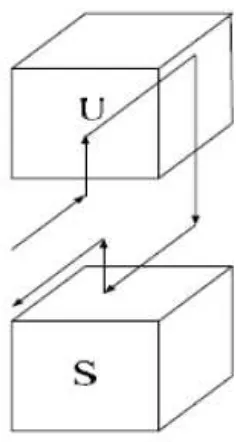
Prinsip kerja motor DC adalah sebagai berikut : ketika terminal input
medan magnet tersebut, dengan demikian medan magnet selain berfungsi sebagai tempat untuk menyimpan energi sekaligus berfungsi sebagai tempat berlangsungya perubahan energi dan daerah tersebut dapat dilihat pada gambar 2.8
Gambar 2.8 Medan Magnet Pada Motor DC
Dengan mengacu pada hukum kekekalan energi :
”Proses energi listrik = energi mekanik + energi panas + energi di dalam medan magnet”
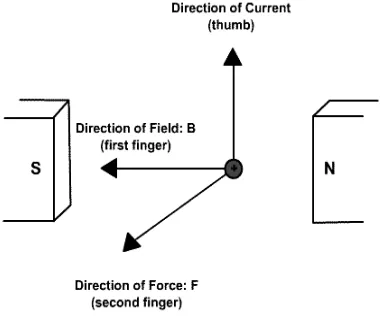
Maka dalam medan magnet akan dihasilkan kumparan medan (stator, bagian motor DC yang tidak berputar) dengan kerapatan fluks sebesar B dengan arus I serta panjang konduktor L, maka diperoleh gaya F sebesar :
Gambar 2.9 Arah Gaya (F)
Bila motor DC memiliki jari – jari r maka persamaan di atas akan menjadi:
Fr = B x I x L x r ……… (2.7) Besarnya gaya (F) akan berpengaruh pada perputaran motor, hal ini dikarenakan saat gaya (F) dibandingkan, konduktor akan bergerak dalam kumparan medan magnet dan menimbulkan gaya gerak listrik yang merupakan reaksi lawan terhadap tegangan sumber.
Agar proses perubahan energi mekanik tersebut dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan.
B. Driver Motor
Agar motor DC dapat bergerak maju, mundur atau berhenti maka diperlukan sebuah driver motor. Ada banyak jenis driver motor yang dapat digunakan namun dalam pembuatan simulasi mobil automatis ini driver motor yang digunakan adalah rangkaian yang bernama H-Bridge.
Rangkaian H-Bridge merupakan rangkaian yang menggunakan 4 buah transisitor sebagai pengatur tegangan yang akan dimasukkan ke motor.
2. 2.Microcontroller ATMega8535
Microcontroller adalah sebuah piranti berupa IC yang memiliki kemampuan manipulasi data (informasi) berdasarkan suatu urutan instruksi (program) yang dibuat oleh programmer. Microcontroller merupakan contoh suatu sistem komputer sederhana yang masuk dalam kategori embedded komputer (komputer yang berintegrasi dengan sistem lain dan digunakan untuk suatu fungsi tertentu, contoh handphone, DVD player, dll). Dalam struktur microcontroller akan kite temukan juga komponen – komponen seperti prosesor, memory, clock, dll.
Seiring dengan perkembangan teknologi saat ini pemrograman
microcontroller relative mudah dilakukan terutama dengan digunakannya metode
ISP (In System Programming) sehingga kita dapat memprogram system
microcontroller sekaligus mengujinya pada system minimumnya secara langsung.
Selain itu dewasa ini banyak alternative bahasa aras tinggi (pascal, C, dll) yang dapat digunakan, hal ini sangat membantu karena selain akan menghemat waku pengembangan, kode program yang disusun juga akan lebih terstruktur dan relative mudah dipelajari.
Dengan berbagai macam kelebihan yang dimiliki serta hal – hal yang menjadi pertimbangan di atas, dewasa ini microcontroller AVR 8 bit produk perusahaan Atmel adalah salah satu microcontroller yang banyak merebut minat kalangan profesional dan juga cocok dijadikan saran berlatih bagi pemula mengingat banyak fitur dan kemudahan yang diberikan microcontroller tersebut.
ATMega8535 merupakan salah satu produk perusahaan atmel yang paling banyak digunakan saat ini. Harga yang relative terjangkau, banyak ditemukan di pasaran, kemudahan dalam pemrograman dan fitur – fitur yang menarik di dalamnya menjadi daya tarik tersendiri bagi ATMega8535. [2]
2. 2. 1. Spesifikasi ATMega8535
1. 130 macam instruksi, yang hampir semuanya diekekusi dalam satu siklus clock. Instruksi ini dapat berupa transfer data, aritmatika & logika, percabangan, dan lain – lain.
3. Kecepatan mencapai 16 MIPS (Million Instruction per Second) dengan clock 16 MHz. ATMega8535 memiliki kemampuan dapat menjalankan 1 instruksi dalam siklus 1 clock dengan kecepatan clock 16 MHz. Berbeda dengan type lain seperti MCS51 yang memerlukan siklus 12 clock dalam mengeksekusi 1 instruksi.
4. 8 Kbyte Flash Memori
5. 512 Byte Internal EEPROM (Elecrically Erasable Programmable Read Only Memory). EEPROM merupakan tempat menyimpan data semi permanen. EEPROM ini dapat menyimpan data meskipun catu daya dimatikan. Dengan adanya EEPROM internal maka tidak diperlukan komponen pendukung seperti EEPROM external seperti beberapa microcontroller lain sehingga penggunaan hardware bisa lebih efisien.
6. 512 Byte SRAM (Static Random Access Memory). Sama halnya seperti computer yang memiliki RAM, microcontroller ATMega8535 juga memiliki SRAM sebesar 512 Byte.
7. Programming Lock fasilitas yang memungkinkan untuk mengamankan kode program.
8. 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit. ATMega8535 memiliki 3 modul yang terdiri dari 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit. Ketiga modul ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling memperngaruhi satu sama lain.
10. 8 channel ADC (Analog Digital Converter) 10-bit. ADC ini merupakan fungsi untuk membantu programmer saat akan mengolah data secara digital. Sesuai dengan namanya ADC ini merubah data awal yang berupa data analog menjadi data digital.
Untuk mendapatkan nilai ADC digunakan rumus :
VADC = (Vin / Vref) * 256 ……….. (2.8)
Keterangan :
VADC = Tegangan ADC (mV)
Vin = Tegangan inputan yang akan diconvert (V) Vref = Tegangan referensi.
256 = Resolusi ADC, ATMega8535 memiliki resolusi 256 dan 1024.
11. Serial USART (Universal Synchronus and Asynchronus Serial Receive and Transmitter). USART merupakan salah satu mode komunikasi serial yang dimiliki oleh ATMega8535. USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroller maupun dengan pheripheral eksternal termasuk PC yang memiliki fiutr UART
mikrokontroller maupun antara mikrokontroller dengan peripheral lain di luar master maka pin MISO ini sebagai input tetapi jika dikonfigurasikan sebagai slave maka pin MISO ini sebagai output.
c) CLK (Clock)
Jika dikonfigurasikan sebagai master maka pin CLK berlaku sebagai output (pembangkit clock) tetapi jika dikonfigurasikan sebagai slave maka pin CLK berlaku sebagai input (menerima sumber clock dari master).
pengaturan konfigurasi Master atau Slave ditentukan oleh pin . Jika pin tersebut diberi tegangan high (1) maka terkonfigurasi sebagai yang terhubung ke pin AIN0 dan masukan negative yang terhubung dengan
pin AIN1. Kemudian hasilnya akan ditunjukkan oleh pin AC0, dimana pin AC0 ini akan bernilai 1 jika tegangan masukan pin positfi lebih besar dari pin negative, begitu juga sebaliknya.
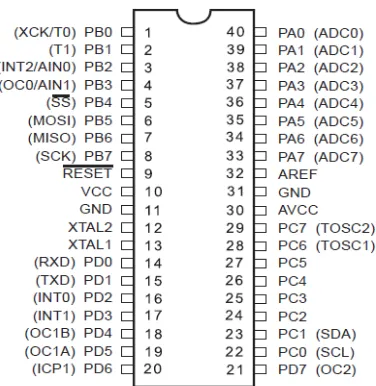
2. 2. 2. Deskripsi Pin ATMega8535
Gambar 2.10 Konfigurasi Pin ATMega8535 Keterangan :
d) VCC : pin masukan catu daya.
e) Gnd : pin ground.
f) Port A (PA0 – PA7) : pin I/O dan pin ADC.
g) Port B (PB0 – PB7) : pin I/O dan pin timer/counter, analog comparator, SPI.
h) Port C (PC0 – PC7) : pin I/O dan TWI, analog comparator, Timer, Oscilator.
i) Port D (PD0 – PD1) : pin I/O dan analog comparator, interupsi eksternal, USART.
k) XTAL1 dan XTAL 2 : pin untuk clock external.
l) AVCC : pin catu daya yang digunakan untuk masukan ADC. m) AREF : pin untuk teganga referensi ADC.
2. 3.Komponen – Komponen Elektronik
Dalam pembuatan mobil automtatis ini ada beberapa komponen elektronik yang digunakan, resistor, IC, dioda, Motor DC, Sensor warna TCS230. 2. 3. 1.Resistor
Resistor merupakan salah satu komponen pasif yang memiliki fungsi untuk mengatur dan menghambat arus listrik. Resistor di beri lambang huruf R dengan satuannya yaitu Ohm ( ). Secara umum resistor berdasarkan nilainya dapat dibagi menjadi 3 bagian,yaitu :
1. Fixed Resistor
Merupakan resistor yang nilai hambatannya tetap. Berikut ini adalah bentuk resistor:
Gambar 2.11 Bentuk Fisik Resistor
Nilai hambatan resistor dapat kita ketahui dari gelang warna yang terdapat pada badan resistor, dimana ketentunanya adalah sebahai berikut:
1. Gelang ke-1 dan gelang ke-2 menyatakan nilai resistor. 2. Gelang ke-3 menyatakan faktor pengali.
3. Gelang ke-4 menyatakan toleransi.
Jika resistor memiliki 5 gelang warna, maka nilai gelang ke-1, 2 dan 3 menyatakan nilai resistor, gelang ke-4 merupakan faktor pengali dan gelang ke-5 menyatakan toleransi. [6]
Sedangkan untuk mengetahui nilai dari warna gelang resistor, kita bisa lihat pada tabel 2.1
Sebuah resistor memiliki gelang warna seperti berikut ini : Gelang ke-1 : Jingga, memiliki nilai 3
Gelang ke-3 : Merah, merupakan faktor pengali 102
Gelang ke-4 : Emas, memiliki nilai toleransi 5% Jadi, resistor di atas memiliki nilai 3000 ± 5 %
2. Variable Resistor
Merupakan resistor yang nilai hambatannya dapat diubah-ubah. Berdasarkan cara merubah hambatannya variable resistor dibagi menjadi 2, yaitu :
1. Trimpot
Merupakan variable resistor yang nilai hambatannya dapat dirubah menggunakan obeng atau alat bantu. [7]
Berikut ini beberapa contoh trimpot:
Gambar 2.13 Variable resistor jenis trimpot 2. Potensio
Merupakan variable resistor yang nilai hambatannya dapat dirubah langsung menggunakan tangan (tanpa menggunakan alat bantu) dengan cara memutar poros engkol atau menggeser kenop untuk potensio geser [7]
Gambar 2.14 Variable resistor jenis potensio
3. Resistor Non Linier
Ada beberapa jenis resistor non linier, diantaranya adalah : 1. PTC ( Positive Temperature Coefisien )
Adalah jenis resistor non linier yang nilai hambatannya terpengaruh oleh perubahan suhu. Makin tinggi suhu di sekitarnya maka makin besar nilai hambatannya. [7]
Berikut adalah contoh PTC:
Gambar 2.15 Bentuk fisik PTC 2. NTC ( Negative Temperature Coefisien )
Berikut adalah contoh NTC:
Gambar 2.16 Bentuk fisik NTC
3. LDR ( Light Dependent Resistor )
Adalah jenis resistor non linier yang nilai hambatannya terpengaruh oleh intensitas cahaya yang mengenainya. Makin besar intensitas cahaya yang mengenainnya makin kecil nilai hambatannya. [7]
2. 3. 2.Dioda
Gbr 2.17 Bentuk fisik dioda dan lambang diode
2. 3. 3.Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Transistor adalah komponen yang sangat penting dalam dunia elektronik modern. Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat). Rangkaian analog melingkupi pengeras suara, sumber listrik stabil, dan penguat sinyal radio. Dalam rangkaian-rangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi. Beberapa transistor juga dapat dirangkai sedemikian rupa sehingga berfungsi sebagai logic gate, memori, dan komponen-komponen lainnya. [10]
2. 3. 4.Optocoupler
Optocoupler merupakan piranti elektronika yang berfungsi sebagai pemisah antara rangkaian power dengan rangkaian control. Optocoupler
merupakankomponen yang berfungsi untuk mengatur feedback yang masuk ke STR / Transistor / IC power pada bagian power supply. [9]
Optocoupler adalah suatu komponen penghubung (coupling) yang
bekerja berdasarkan picu cahaya optic. Optocoupler terdiri dari dua bagian yaitu :
1. Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra merah tidak terlihat oleh mata telanjang.
2. Pada bagian receiver dibangun dengan dasar komponen Photodiode.
Photodiode merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka Photodiode lebih peka untuk menangkap radiasi dari sinar infra merah.
Prinsip kerja dari optocoupler adalah :
b. Sebaliknya jika antara Photodiode dan LED tidak terhalang maka Photodiode dan LED tidak terhalang maka Photodiode tersebut akan on sehingga output-nya akan berlogika low.