4
PEMODELAN SISTEM FISIS
4.1 Pendahuluan
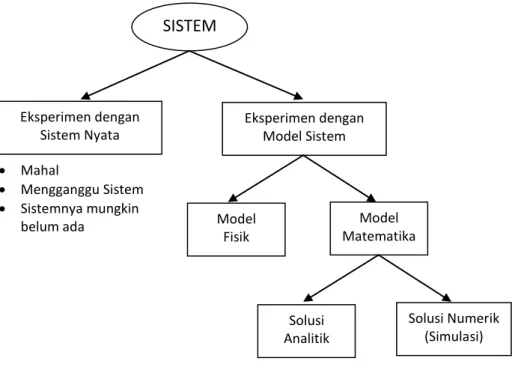
Satu tugas yang penting dalam analisis dan perancangan sistem kendali adalah pemodelan dari sistem. Sebelum kita melakukan perancangan sebuah sistem kendali, terlebih dahulu harus dilakukan studi terhadap sistem yang akan dibangun. Ada dua cara yang dapat dilakukan dalam rangka melakukan studi terhadap sebuah sistem, seperti yang jelaskan pada Gambar 4.1, yaitu :
1. Melakukan eksperimen dengan sistem nyata 2. Melakukan eksperimen dengan model sistem
Pada cara pertama, hasil eksperimen hasilnya memang bisa langsung terlihat, namun memiliki kendala yang signifikan, diantaranya ialah biaya eksperimen yang mahal dan keberhasilannya belum dapat dipastikan, mengganggu sistem yang sedang berjalan dan mungkin saja sistem yang akan dipelajari belum eksis.
Cara kedua yaitu melakukanan eksperimen dengan model sistem merupakan alternatif yang terbaik, meskipun masih ada beberapa kesulitan dan kekurangan. Model sistem yang akan dibuat bisa dalam bentuk model fisik ataupun model matematika tergantung dari sistem yang akan dipelajari. Pada sistem kontrol biasanya menggunakan model matematika, yaitu persamaan differensial fungsi waktu (dinamik). Solusi yang diterapkan bisa dengan secara analitik ataupun numerik (simulasi). Cara lainnya yang relatif mudah adalah dengan metode Transformasi Laplace sebagaimana telah diuraikan di bab sebelumnya.
Gambar 4.1 Studi Sistem
Di dalam melakukan pemodelan suatu sistem, ada dua jenis pemodelan yang biasa digunakan :
1. Pemodelan secara fisik, yaitu dengan melakukan penyekalaan dan analogi terhadap sistem yang sebenarnya.
2. Pemodelan secara matematik, yaitu dengan menuliskan sistem atau proses ke dalam bentuk persamaan-persamaan matematik yang dilakukan berdasarkan analisa secara analitik dari tiap-tiap komponen atau subsistem maupun berdasarkan pada data-data hasil percobaan (eksperimen).
Model-model matematis, dalam bentuk persamaan-persamaan sistem, digunakan bila hubungan-hubungan yang mendetail diperlukan. Secara teoritis setiap sistem kendali bisa dicirikan oleh persamaan-persamaan matematis. Solusi dari persamaan-persamaan itu menyatakan tingkah laku sistemnya. Solusi tersebut sering kali sulit meskipun mungkin untuk diperoleh. Dalam hal ini, harus dilakukan permisalan-permisalan penyederhanaan tertentu dalam uraian matematisnya yang
Eksperimen dengan Sistem Nyata Eksperimen dengan Model Sistem Model Fisik Model Matematika Solusi Numerik (Simulasi) Solusi Analitik SISTEM Mahal Mengganggu Sistem Sistemnya mungkin belum ada
dibuat untuk memudahkan analisa yaitu biasanya dibuat agar sistem adalah linier, tidak berubah terhadap waktu (Linear Time Invariant, LTI). Untuk melakukan verifikasi, digunakan seluruh model secara ditail dan persamaan-persamaan model selanjutnya diselesaikan secara numerik dengan melakukan simulasi komputer.
4.2 Konsep Pemodelan Sistem
Seseorang yang akan melakukan proses desain sistem kontrol, maka orang tersebut harus mengerti dan memahami konsep pemodelan dari suatu sistem atau proses. Pada bagian ini akan dibahas model matematis dari suatu sistem. Istilah model matematis diartikan sebagai hubungan matematik yang menghubungkan keluaran sistem ke masukannya. Model-model matematis ini akan digunakan untuk memberikan gambaran mengenai analisis dan perancangan sistem kendali. Model-model matematis ini juga digunakan untuk memperkirakan bagaimana sistem akan memberikan pada kondisi-kondisi spesifik yang pasti tanpa menguji sistem yang sebenarnya.
Di dalam kamus IEEE, model matematis dari suatu sistem didefinisikan sebagai kumpulan persamaan yang digunakan untuk mewakili sistem fisik. Adapun tujuan dari pemodelan suatu sistem adalah :
1. Model matematika suatu sistem merupakan dasar untuk semua analisa serta metode desain sistem kontrol.
2. Sistem yang telah dimodelkan secara detail, memungkinkan dilakukan beberapa verifikasi dari performansi sistem kontrol yang didesain melalui simulasi sebelum diaplikasikan pada sistem yang sebenarnya.
Harus dimengerti bahwa tidak ada model matematis yang pasti dari suatu sistem fisik. Ketepatan dari suatu model dapat ditingkatkan dengan cara meningkatkan kerumitan persamaan-persamaan, tetapi kita tidak pernah dapat mencapai
kepastian. Kita umumnya berusaha keras untuk mengembangkan sebuah model supaya dapat menyelesaikan persoalan tanpa membuat model yang terlalu rumit.
Adapun langkah-langkah yang dilakukan dalam melakukan pemodelan suatu sistem adalah sebagai berikut :
1. Menentukan sistem fisik yang akan dikontrol, yaitu antara lain melakukan identifikasi batasan-batasan dari sistem, blok-blok fungsional, interkoneksi antar variabel, input dan output. Selanjutnya kita susun dalam suatu diagram blok fungsional.
2. Menentukan model dari tiap-tiap komponen atau subsistem. Pada langkah ini, kita mengaplikasikan hukum-hukum fisika yang mungkin atau menggunakan data-data eksperimental untuk mengidentifikasi hubungan antara input dengan output.
3. Menggabungkan model-model subsistem yang telah dibuat membentuk model keseluruhan sistem, yaitu dengan menggabungkan persamaan-persamaan, mengeliminasi variabel serta mengecek kecukupan dari persamaan-persamaan yang digunakan untuk menyelesaikan sistem.
4. Melakukan verifikasi kevalidan serta keakuratan model dengan melakukan simulasi menggunakan persamaan-persamaan model dan membandingkannya dengan data-data eksperimental yang diperloleh pada kondisi yang sama.
5. Melakukan penyederhanaan untuk mendisain sistem kontrol yang sesuai dengan model, antara lain melakukan linierisasi persamaan-persamaan model, memperkecil orde model dengan menghilangkan dinamika-dinamika yang tidak penting.
4.3 Persamaan Diferensial Sistem-sistem Fisis
Suatu sifat umum untuk semua hukum dasar fisika adalah bahwa besaran-besaran dasar tertentu dapat didefinisikan dengan harga-harga numerik. Hukum-hukum fisika mendefinisan hubungan antara besaran-besaran dasar ini dan biasanya dinyatakan oleh persamaan-persamaan.
Persamaan diferensial adalah setiap kesamaan aljabar yang mengandung diferensial atau turunan. Sebuah persamaan diferensial dari sistem-sistem fisis menggambarkan performansi dinamik dari suatu sistem fisis yang diperoleh dengan mengaplikasikan hukum-hukum fisika pada proses sistem tersebut. Persamaan diferensial berguna untuk menghubungkan laju perubahan variabel dan parameter-parameter lain dari suatu sistem fisis. Pada buku ini diberikan pemodelan dari sistem-sistem fisis pada sistem mekanik, sistem listrik serta elektro-mekanik dimana hubungan antar variabel dan parameter-parameternya dituliskan dalam sebuah persamaan diferensial.
4.4 Fungsi Alih
Cara klasik pemodelan sistem linier adalah menggunakan fungsi alih untuk mewakili hubungan masukan dan keluaran antar variabel. Salah satu cara untuk menentukan fungsi alih adalah dengan menggunakan respons impulse seperti yang akan dijelaskan berikut ini.
Perhatikan bahwa sebuah sistem LTI mempunyai masukan u (t) dan keluaran y(t). Sistem dikarakterisasi dengan respon impulsenya yaitu g(t), yang diartikan sebagai keluaran ketika masukannya fungsi impulse satuan, (t). Ketika respon impulse dari sistem linier diketahui, keluaran sistem y(t) dengan masukan u(t) apapun, dapat ditemukan dengan menggunakan fungsi alih.
TEKNIK KONTROL OTOMATIK SAEFUL BAHRI, ST, MT Fungsi alih dari sistem LTI diartikan sebagai transformasi Laplace dari respon impulse dengan seluruh kondisi awal adalah nol. Misalkan G(s) menyatakan fungsi alih dari sistem masukan tunggal keluaran tunggal dengan masukan u(t) dan keluaran y(t) serta respon impulse g(t), maka fungsi alih G(s) didefinisikan sebagai :
)]
(
[
)
(
s
g
t
G
L
(4.1)Fungsi alih G(s) berhubungan dengan transformasi Laplace masukan dan keluaran melalui hubungan berikut :
(4.2)
Dengan seluruh kondisi awal nol, Y(s) dan U(s) merupakan transformasi Laplace dari y(t) dan u(t).
4.5 Model Sistem Listrik
Cara klasik untuk menuliskan persamaan-persamaan rangkaian listrik adalah didasari pada metode simpul yang dirumuskan dari dua hukum kirchoff, yaitu hukum arus kirchoff dan hukum tegangan kirchoff.
Hukum Arus Kirchoff (KCL) dan hukum Tegangan Kirchoff (KVL) yaitu :
0 0
loop node V I (4.3) Pada hukum kirchoff arus dinyatakan bahwa Jumlah arus pada setiap titik percabangan adalah nol atau jumlah arus yang masuk ke suatu titik pecabangan sama dengan jumlah arus yang meninggalkannya. Sedangkan pada hukum kirchoff tegangan dinyatakan bahwajumlah tegangan pada setiap simpal adalah sama dengan nol. Hukum-hukum ini merupakan dasar dari prosedur proses pemodelan matematika sistem listrik. Sebenarnya, terlalu banyak jenis-jenis komponen elektrikyang biasar digunakan. Namun, bab ini hanya akan membahas model matematika dari komponen yang sederhana, biasa disebut dengan komponen pasif dan linear. Komponen pasif yang akan dibahas adalah: Resistor, Kapasitor dan Induktor.
Sebuah resistor disimbolkan seperti tampak pada Gambar 4.2a dan memiliki persamaan matematika sebagai berikut:
iR v , atau R dt dq v (4.4)
Sedangkan Kapasitor mempunyai simbol seperti pada Gambar 4.2b dan persamaan matematika sebagai berikut:
idt C v 1 , atau q C v 1 (4.5)Simbol sebuah induktor ditunjukkan pada Gambar 4.2c. Persamaan matematika dari sebuah induktor adalah:
dt di L v , atau 2 2 dt q d L v (4.6) (a) (b) (c)
Gambar 4.2 Simbol-simbol komponen listrik (a) Resistor, (b) Kapasitor dan (c) Induktor
L C
Biasanya, penggunaan arus, i, lebih disukai dalam penggunaan komponen elektrik praktis selain penggunaan muatan, q. Penggunaan muatan, q, akan membuat persamaan matematikanya menjadi persamaan diferensial biasa.
Sebagai contoh, sebuah rangkaian R-L-C seri lup tunggal digambarkan pada Gambar 4.3. Persamaan tegangan dari gambar tersebut adalah :
v0, 0 v v e vR C L ) ( ) ( ) ( 1 ) ( e t dt t di L dt t i C R t i
(4.7) atau : ( ) 1 ( ) ( ) ( ) 2 2 t e dt t q d L t q C R dt t dq (4.8)Gambar 4.3 Sebuah rangkaian R-L-C seri
Persamaan diferensial diatas dapat diselesaikan salah satunya dengan menggunakan kaidah Transformasi Laplace. Jika transformasi Laplace dilakukan pada persamaan (4.8), maka berdasarkan pada persamaan 3.6 dan 3.7 diperoleh fungsi alih sistem adalah :
) ( ) ( ) ( 1 ) ( e t dt t di L dt t i C R t i
R e C + - L i) ( ) ( . ) ( 1 ) ( I s LsI s E s sC R s I (4.9) ) ( 1 ) ( Ls E s sC R s I
C Rs Ls Ls sC R s E s I 1 1 1 1 ) ( ) ( 2 (4.10)Jika sebuah rangkaian listrik mempunyai 2 buah lup, seperti yang ditunjukkan pada Gambar 4.4:
Gambar 4.4 Sebuah rangkaian R-L-C dua lup
Persamaan-persamaan diferensial dari Gambar 4.4 tersebut di atas dapat dijelaskan sebagai berikut :
Persamaan pada lup 1: 0 1 1 1v v e vR C L ) ( ) ( ) ( 1 ) ( 1 ) ( 1 1 2 1 1 1 1 1 e t dt t di L dt t i C dt t i C R t i
(4.11)Persamaan pada lup 2: 0 1 2 2 2 C L C R v v v v e + - R1 L1 i1 R2 L2 C1 C2 i2
0 1 1 1 1 1 2 1 2 2 2 2 2 2
idt C dt i C dt di L dt i C R i (4.12)Jika transformasi Laplace dilakukan pada persamaan (4.11) dan (4.12), maka diperoleh fungsi alih sistem adalah :
) ( ) ( ) ( 1 ) ( 1 ) ( 1 1 2 1 1 1 1 1 e t dt t di L dt t i C dt t i C R t i
) ( ) ( ) ( 1 ) ( 1 ) ( 2 1 1 1 1 1 1 1 I s Ls I s E s sC s I sC R s I ) ( ) ( 1 1 ) ( 2 1 1 1 1 1 I s E s sC s L sC R s I (4.13) 0 1 1 1 1 1 2 1 2 2 2 2 2 2
i dt C dt i C dt di L dt i C R i 0 ) ( 1 ) ( ) ( 1 ) ( 1 1 2 2 2 2 2 2 I s sC s I s L s I sC R s I 0 1 ) ( ) ( 1 2 2 2 2 1 1 L s sC R s I s I sC (4.14)Jika persamaan (4.13) dan (4.14) dituliskan kedalam bentuk matriks diperoleh :
0 ) ( ) ( ) ( 1 1 1 1 2 1 2 2 2 1 1 1 1 1 s E s I s I s L sC R sC sC s L sC R (4.15)
4.6 Model Sistem Mekanik Translasi
Sistem mekanik adalah sistem yang berkaitan erat dengan masalah posisi (jarak), kecepatan dan percepatan. Kaidah umum yang dipakai pada sistem mekanik adalah Hukum-Hukum Gerak Newton. Komponen sistem mekanik translasi yang akan dibahas adalah komponen pasif dan linear, yaitu: massa (M), pegas (K) dan komponen gesek atau serap (D).
Simbol dan persamaan gaya dari massa, adalah:
Gambar 4.5 Simbol sebuah Massa, M pada gerak translasi
2 2 , , dt x d M F dt dv M F Ma F a ta u a ta u (4.16)
Sedangkan, simbol dan persamaan pegas adalah sebagai berikut:
Gambar 4.6 Simbol sebuah pegas Kx
Dan, simbol serta persamaan gesek adalah sebagai berikut:
Gambar 4.7 Simbol gesekan viskos dt
dx D
F (4.18)
Berdasarkan ketiga komponen pasif itulah, dapat dirancang sebuah sistem mekanik translasi.
Untuk membuat model matematika sistem mekanik translasi, hanya memerlukan satu persamaan diferensial, yang disebut persamaan gerak. Biasanya disepakati, bahwa arah tertentu (misalnya arah ke kanan atau ke bawah) adalah arah positif, dan berarti arah sebaliknya (arah ke kiri atau ke atas) adalah arah negative. Kemudian, berdasarkan kesepakatan arah tersebut, digambarkan free body diagram, yaitu menempatkan semua gaya-gaya yang terjadi pada bagian sistem. Setelah itu, Hukum Newton diterapkan dengan menjumlahkan semua gaya-gaya tersebut dan menyamakannya dengan nol.
Contoh sebuah sistem mekanik adalah sebagai berikut:
Gambar 4.8 Sistem Mekanika
D
F
x K
maka, free body diagram-nya adalah sebagai berikut:
Gambar 4.9 Free body diagram Sistem Mekanik untuk Gambar 4.8
sehingga, persamaan geraknya adalah:
F dt dx D Kx dt x d M F F F F F D K M
2 2 0 0 (4.19)Seperti sistem elektrik, sistem mekanik juga mempunyai rangkaian 2 lup, sebagaimana tampak pada Gambar 4.10 dibawah ini:
Gambar 4.10 Sistem Mekanik 2 Lup D1 F x1 K1 M1 K2 M2 D2 K3 x2 FD F x FK M FM
maka, terdapat 2 free body diagram, seperti tampak pada Gambar berikut ini:
Gambar 4.11 Free body diagram Sistem Mekanik 2 Lup:
(a) Lup pertama, dan (b) Lup kedua
Berdasarkan free body diagram diatas, dapat diturunkan 2 persamaan gerak, yaitu:
Lup pertama: 0 0 2 2 1 2 1 1 1 1 2 1 2 1 2 1 1 1 x K x K dt dx D x K dt x d M F F F FM K D K (4.20) Lup kedua: F x K dt dx D x K x K dt x d M F F F F FM K D K 2 3 2 2 1 2 2 2 2 2 2 2 3 2 2 2 (4.21)
Secara umum, sistem mekanik memiliki bentuk persamaan yang sama dengan sistem mekanik. Karakteristik ini dikenal dengan istilah Analogi Elektrik-Mekanik.
x2 F M2 FK3 FM2 FD2 FK2 FK2 (a) (b) x1 FD1 FK1 M1 FM1 FK2 FK2 x1
Contoh Soal:
Turunkan model matematika (dalam bentuk persamaan matematika) (a) sistem elektrik dan (b) sistem mekanik di bawah ini :
D1 F x1 K1 M1 M2 D3 K2 x2 D2 (b) V + - R1 L1 R2 L2 C1 C2 (a)