PEMODELAN KINEMATIKA SISTEM PENGARAHAN MISIL DENGAN PERHITUNGAN GANGGUAN PADA LANDASAN
Moh. Imam Afandi*)
ABSTRACT
Kinematic modeling of missile aiming system has been done for a moving target with the calculation of base disturbances, i.e roll, pitch and yaw disturbances. Kinematic modeling of missile aiming system is made using Denavit-Hartenberg convention. The missile trajectory calculation will also be explained without aerodynamic analysis. The kinematics of missile aiming system can be proved mathematically with high precision to the predicted target although there is an occurrence of base disturbances.
Keywords : kinematics, missile, roll, pitch, yaw, Denavit-Hartenberg convention, trajectory.
PENDAHULUAN
Sistem alat penembak sangat memerlukan sistematika pengarahan untuk menjamin misil tepat pada sasaran. Sistem alat penembak ini biasanya banyak dipasang pada kendaraan-kendaraan perang seperti pada kapal perang, kapal selam, tank, pesawat tempur, dsb. Hal ini jelas mengakibatkan gerakan pada landasan alat penembak sehingga sistematika perhitungan dari pengarahan misil akan menjadi sangat kompleks. Gangguan pada landasan sistem ini biasanya disebabkan oleh gangguan luar. Sebagai contoh, kapal mengalami gangguan landasan karena gelombang laut, tank mengalami gangguan landasan karena medan yang tidak rata, kapal selam mengalami gangguan landasan disebabkan oleh arus bawah laut, pesawat mengalami gangguan landasan karena turbulensi angin dan gerakan manuvernya sendiri. Gangguan landasan tersebut dapat dikelompokkan menjadi 3 bentuk gangguan, yaitu gangguan roll, gangguan pitch dan gangguan yaw. Gangguan roll merupakan gangguan yang mengakibatkan sistem menjadi miring, gangguan pitch merupakan gangguan yang mengakibatkan sistem mengangguk, sedangkan gangguan yaw merupakan gangguan yang mengakibatkan sistem berputar.
Ketiga bentuk gangguan tersebut akan mengakibatkan kesalahan pengarahan yang sangat
signifikan dalam sistem penembakan. Untuk mengatasi gangguan ini, salah satunya dapat
diselesaikan dengan menggunakan persamaan kinematika robotika. Persamaan
juga memperhitungkan trayektori misil. Perhitungan trayektori misil dengan berbagai karakteristik aerodinamikanya telah banyak dikemukakan oleh beberapa ahli(Lee et al.,1999; Akcay, 2004; Akgul & Karasoy, 2005).
Dalam tulisan ini akan dibahas pemodelan kinematika sistem pengarahan misil dengan memperhitungkan gangguan pada landasan menggunakan konvensi persamaan Denavit-Hartenberg. Selain itu, trayektori misil juga diperhitungkan dalam pemodelan ini, namun dibatasi tanpa memperhatikan faktor aerodinamikanya. Hal ini bertujuan untuk memudahkan perhitungan dan mempercepat respon sistem secara real time.
DASAR TEORI
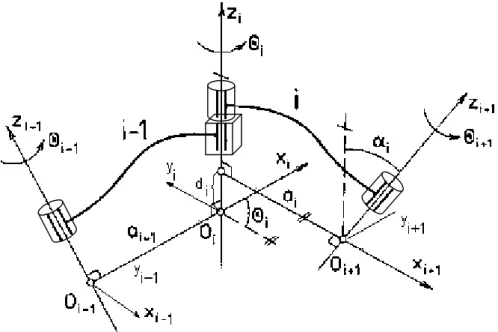
Untuk menyelesaikan permasalahan kinematika, harus mempunyai pengetahuan dasar mengenai matrik transformasi homogenous(Selig, 1992). Selanjutnya, penyelesaian permasalahan kinematika dari suatu sistem dapat diselesaikan dengan menggunakan konvensi parameter Denavit-Hartenberg(Sciavicco & Siciliano, 1996). Konvensi ini dapat dijelaskan dengan beberapa langkah. Langkah pertama adalah menentukan lokasi sendi dengan menamakan sumbu sendi Z 0 . . . Z n-1 dengan n = jumlah sendi, serta menyesuaikan sumbu X 0 dan Y 0 seperti yang diberikan pada Gambar 1.
Gambar 1. Koordinat Sumbu Sendi
Selanjutnya pada langkah kedua, menentukan lokasi titik asal O i pada perpotongan Z i-1 dengan keadaan bidang normal ke Z i-1 dan Z i seperti yang diberikan pada Gambar 2. Jika Z i-1 adalah paralel dan sendi i adalah sendi putar(revolute), yang diilustrasikan dalam bentuk tabung, maka tentukan O i sehingga d i = 0. Namun jika sendi i adalah sendi translasi(prismatic), yang diilustrasikan dalam bentuk kubus, maka tentukan O i pada posisi referensi dari sendi i - 1.
X 0
Y 0
X n-1
Y n-1
Z n-1
...
..
Gambar 2. Transformasi Link Konvensi Parameter Denavit-Hartenberg
Kemudian dengan tetap mengacu pada Gambar 2, pada langkah ketiga, adalah menentukan sumbu X i yang mempunyai garis normal terhadap sumbu Z i dan Z i-1 yang mempunyai arah terhadap sendi i ke sendi i + 1. Langkah keempat, menentukan Yi dengan kaidah tangan kanan seperti yang ditunjukkan pada Gambar 1. Langkah kelima, menentukan tabel dari parameter lengan a i , d i , α i dan θ i dimana a i menyatakan jarak sepanjang X i dari O i ke perpotongan O i+1 , sedangkan d i menyatakan jarak sepanjang Z i-1
dari O i-1 ke perpotongan O i dan d i merupakan variabel jika sendinya translasi(prismatic).
Selanjutnya α i menyatakan sudut antara Z i-1 dan Z i terhadap sumbu X i yang nilainya positif jika rotasi berlawanan arah jarum jam. Untuk θ i menyatakan sudut antara X i-1 dan X i terhadap sumbu Z i-1 yang nilainya positif jika berlawanan arah jarum jam dan juga parameter θ i merupakan variabel jika sendinya putar(revolute). Langkah keenam, dilakukan dengan cara mensubstitusikan parameter a i , d i , α i dan θ i ke dalam persamaan matrik transformasi homogeneous A
ii1seperti yang diberikan pada Persamaan (1).
Selanjutnya, dilakukan perkalian seluruh matrik transformasi homogeneous A
ii1sehingga membentuk persamaan kinematika maju T
n0 A
10... A
nn1, yang memberikan
posisi dan orientasi dari kerangka ujung terhadap kerangka dasar.
1 0
0 0
cos sin
0
cos . sin
. cos cos
. cos sin
cos . sin
. sin cos
. sin cos
1
i i
i
i i i i i
i i
i i
i i i
i i
i
i
d
a c a
A
untuk i 1 ,..., n ... ( 1 )
Hasil perkalian matrik homogeneous T
n0ini memiliki vektor-vektor yang relatif terhadap sumbu utama yang dapat dijabarkan sebagai berikut :
1 0 0 0
0
z z z z
y y y y
x x x x
n
n s a d
d a s n
d a s n
T ... ( 2 )
dimana : n = vektor arah sumbu O n X n terhadap O 0 X 0 Y 0 Z 0 (normal) s = vektor arah sumbu O n Y n terhadap O 0 X 0 Y 0 Z 0 (sliding) a = vektor arah sumbu O n Z n terhadap O 0 X 0 Y 0 Z 0 (approach) d = vektor pergeseran O n terhadap O 0 (translasi)
Dari parameter-parameter tersebut di atas selanjutnya dapat diturunkan persamaan model kinematika sesuai dengan sistem yang didisain .
Untuk perhitungan trayektori misil dimana faktor aerodinamikanya diabaikan, maka dalam hal ini hanya gravitasi bumi yang mempengaruhi pergerakan misil. Oleh sebab itu dapat diterapkan persamaan gerak trayektori parabola seperti yang diberikan pada Gambar 3.
Gambar 3. Gerak Trayektori Parabola
Persamaan gerak trayektori parabola(Wikipedia, 2002) yang penting untuk diketahui
dalam perhitungan trayektori misil, antara lain :
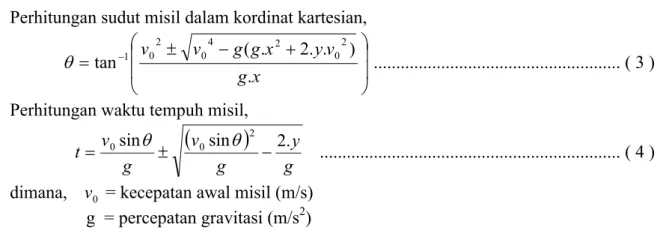
Perhitungan sudut misil dalam kordinat kartesian,
x g
v y x g g v v
.
) . . 2 . tan (
2 0 4 2
0 2 1 0
... ( 3 ) Perhitungan waktu tempuh misil,
g y g
v g
t v
0sin
0sin
2 2 .
... ( 4 ) dimana, v = kecepatan awal misil (m/s)
0g = percepatan gravitasi (m/s 2 )
PEMODELAN KINEMATIKA SISTEM
Sistem pengarahan misil minimal menggunakan dua penggerak utama yaitu penggerak azimuth(bearing/pen) dan penggerak elevasi(tilt). Sementara itu juga ada 3 bentuk gangguan pada landasan yang berupa gangguan roll, pitch dan yaw. Kemudian dengan menggabungkan ketiga bentuk gangguan tersebut dengan dua penggerak utama sistem, maka akan didapatkan kinematika sistem pengarahan dengan 5 derajad kebebasan seperti yang diberikan pada Gambar 4.a. Kemudian untuk menghasilkan tabel konvensi yang unik, maka sumbu koordinat setiap sendi ditentukan seperti yang diberikan pada Gambar 4.b.
Gambar 4. a. Susunan Sendi Sistem Pengarahan Misil O
0(a) (b)
O
1O
2O
3O
4Missile Aiming
Pitch Roll Azimuth
Elevasi
L
x
2y
2z
2z
1y
1y
3x
3z
3z
4x
4y
4x
1Yaw
z
0x
0y
0HASIL DAN PEMBAHASAN
Dengan menerapkan langkah-langkah yang telah ditetapkan oleh konvensi parameter Denavit-Hartenberg, maka dengan mengacu pada Gambar 4.b. akan didapatkan hasil yang diberikan pada Tabel 1.
Tabel 1. Parameter Denavit-Hartenberg Pada Sistem Pengarahan Misil
i Sendi a
iα
id
iθ
i1 Yaw 0 90
00 θ
12 Pitch 0 90
00 θ
2+90
03 Roll 0 90
00 θ
3+90
04 Azimuth 0 90
0L θ
4+90
05 Elevasi 0 0 0 θ
5Data yang ditampilkan pada Tabel 1. dapat dijelaskan dengan cara sederhana, misalnya pada sendi yaw, parameter a 1 bernilai nol karena tidak jarak antara O 0 dan O 1
sepanjang sumbu x o . Sedangkan parameter α 1 bernilai 90 0 karena terjadi perputaran berlawanan arah jarum jam dengan sudut 90 0 dari z 0 ke z 1 jika dilihat dari sumbu x 1 . Kemudian parameter d 1 juga bernilai nol karena tidak ada jarak antara O 0 dan O 1
sepanjang sumbu z 0 . Sedangkan untuk parameter θ 1 adalah variabel karena merupakan sendi putar(revolute). Parameter θ 1 ini tidak ada penambahan konstanta sudut karena sumbu x o dan sumbu x 1 tidak membentuk sudut jika dilihat dari sumbu z 0 . Hal ini juga berlaku sama pada sendi-sendi yang lain.
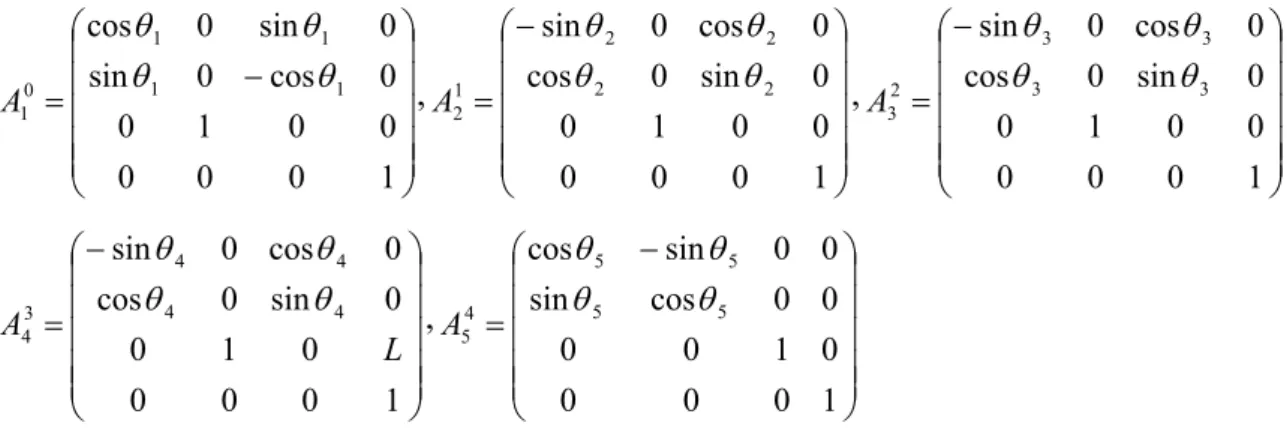
Selanjutnya data Tabel 1. tersebut dimasukkan ke dalam Persamaan (1) dan hasilnya sebagai berikut ini :
1 0 0 0
0 0 1 0
0 cos 0
sin
0 sin 0 cos
1 1
1 1
0 1
A ,
1 0 0 0
0 0 1 0
0 sin 0 cos
0 cos 0 sin
2 2
2 2
1 2
A ,
1 0 0 0
0 0 1 0
0 sin 0 cos
0 cos 0 sin
3 3
3 3
2 3
A
1 0 0 0
0 1 0
0 sin 0 cos
0 cos 0 sin
4 4
4 4
3
4
L
A
,
1 0 0 0
0 1 0 0
0 0 cos sin
0 0 sin cos
5 5
5 5
4 5
A
Kemudian dengan memisalkan cos c dan sin s untuk i = 1 ... 5, maka
1 0 0 0
0
z z z z
y y y y
x x x x
n
n s a d
d a s n
d a s n T
dimana, n
x (-(c
1s
2s
3+ s
1c
3)s
4+ c
1c
2c
4)c
5+ (-c
1s
2c
3+ s
1s
3)s
5n
y ( -(s
1s
2s
3- c
1c
3)s
4+ s
1c
2c
4)c
5+ (-s
1s
2c
3- c
1s
3)s
5n
z (c
2s
3s
4+ s
2c
4)c
5+ c
2c
3s
5s
x -(-(c
1s
2s
3+ s
1c
3)s
4+ c
1c
2c
4)s
5+ (-c
1s
2c
3+ s
1s
3)c
5s
y -(-(s
1s
2s
3- c
1c
3)s
4+ s
1c
2c
4)s
5+ (-s
1s
2c
3- c
1s
3)c
5s
z -(c
2s
3s
4+ s
2c
4)s
5+ c
2c
3c
5a
x (c
1s
2s
3+ s
1c
3)c
4+ c
1c
2s
4a
y (s
1s
2s
3- c
1c
3)c
4+ s
1c
2s
4a
z -c
2s
3c
4+ s
2s
4d
x (-c
1s
2c
3+ s
1s
3)L d
y (-s
1s
2c
3- c
1s
3)L d
z c
2c
3L
Kemudian dengan melihat kembali pada Gambar 4.b, akan didapatkan bahwa sistem pengarahan misil diwakili oleh koordinat sumbu x 4 yang relatif terhadap sumbu koordinat base O o x o y o z o . Sehingga matrik sudut pengarahan misil dengan gangguan landasan direpresentasikan oleh kolom pertama dari hasil kali perkalian matrik transformasi homogenous,
θ 1 θ 2 θ 3 0 →
5 3 2 5 4 2 4 3 2
5 3 1 3 2 1 5 4 2 1 4 3 1 3 2 1
5 3 1 3 2 1 5 4 2 1 4 3 1 3 2 1
s c c + )c c s + s s (c
)s s c - c s (-s + )c c c s + )s c c - s s (-(s
)s s s + c s (-c + )c c c c + )s c s + s s (-(c Z
Y X
sehingga untuk mengatasi kesalahan sudut pengarahan yang terjadi, dapat dipakai sudut referensi pada masing-masing penggerak sebagai berikut :
Kemudian hal yang paling penting dalam suatu penembakan yang efektif adalah sistem dapat diperbolehkan menembak jika sasaran berada di dalam jangkauan penembakan. Pada sasaran yang bergerak juga diperlukan data posisi untuk setiap waktu sebagai dasar pengambilan keputusan dalam menentukan prediksi sasaran dengan tepat.
Misalkan posisi sasaran diwakili oleh koordinat ruang (x s , y s , z s ) yang relatif terhadap sumbu koordinat O o . Selanjutnya koordinat posisi sasaran ini ditransformasikan ke dalam posisi sasaran trayektori parabola misil,
2 2
s
s
y
x
x , y ... ( 5 ) z
sDalam perhitungan trayektori misil ini, banyak dilema yang ditemui dalam penentuan sudut penembakan yang tepat pada sasaran bergerak. Hal ini disebabkan oleh adanya 2 variabel yang belum diketahui dan saling ketergantungan. Variabel itu adalah prediksi titik sasaran dan waktu tempuh yang sama antara misil dan sasaran untuk menuju prediksi titik pertemuan.
Untuk memudahkan permasalahan tersebut, diasumsikan bahwa waktu tempuh misil sangat cepat dan mengenai sasaran hampir mendekati nol, sehingga posisi prediksi sasaran hampir sama dengan posisi sasaran yang terdeteksi. Selain itu, harus dipastikan terlebih dahulu bahwa sasaran sudah berada dalam daerah jangkauan penembakan, dengan persyaratan sebagai berikut :
2 0 2
4 2
0
g . x 2 . g . y . v
v ,
g y v
. 2
2
0... ( 6 ) Persyaratan ini didapatkan dengan menghindari nilai akar-akar yang tidak imajiner pada Persamaan (3) dan (4). Selanjutnya dapat dihitung sudut pengarahan misil untuk posisi prediksi sasaran menggunakan Persamaan (3). Kemudian, hasil sudut pengarahan misil ini menjadi sudut referensi untuk penggerak elevasi, sedangkan sudut referensi untuk penggerak azimuth dihasilkan dari sudut yang dibentuk oleh posisi x s dan y s
sasaran terhadap koordinat sumbu O 0 pada Gambar 4.b.
Untuk membuktikan metode di atas, digunakan data-data sebagai berikut :
kecepatan awal misil (v o )= 1000 m/s, gravitasi bumi (g) = 9,8 m/s 2 , posisi sasaran berada
di koordinat (1000,1000,1000) dalam satuan meter, sudut gangguan roll 30 0 , sudut
Selanjutnya, dipastikan terlebih dahulu bahwa sasaran sudah berada dalam daerah jangkauan penembakan dengan menggunakan Persamaan (6),
benar v y g x g v
10 12
8 2 12
0 2
4 2 0
10 . 98 . 1 10
10 . 196 9 , 192076315 10
. . . 2
. ,
benar g
y v
3 3
6 3 2
0
10 . 51 10
8 , 9 . 2 10 10 .
2
Setelah persyaratan dipenuhi, selanjutnya dapat dihitung sudut pengarahannya dengan menggunakan Persamaan (3), sehingga diperoleh
1 6 12 4 82 0 4 2
0 2 0 1
10 . 4 . 1
10 . 98 . 1 10 tan 10
.
) . . 2 . tan (
x g
v y x g g v
v
1 6 4 410 . 4 . 1
10 . 99
tan 10
4 04 6
1
35 , 5
10 . 4 . 1
10 . 99
tan 10
dan diperoleh
5 35 . 5
0, sedangkan
4 tan
1( 1000 , 1000 ) 45
0, sehingga didapatkan matrik sudut pengarahan misil dengan gangguan landasan,
0.9719 0.232 0.0147 -
s c c + )c c s + s s (c
)s s c - c s (-s + )c c c s + )s c c - s s (-(s
)s s s + c s (-c + )c c c c + )s c s + s s (-(c
5 3 2 5 4 2 4 3 2
5 3 1 3 2 1 5 4 2 1 4 3 1 3 2 1
5 3 1 3 2 1 5 4 2 1 4 3 1 3 2 1
Z Y X
kemudian, akan didapatkan
Sudut referensi untuk penggerak azimuth =
4
4 Arc . Tan 2 Y , X
= 45 + ( 45 - 93.61 ) = -3.61 0 Sudut referensi untuk penggerak elevasi =
4
4 Arc . Tan 2 Y , X
= 35.5 + ( 35.5 - 76.54 ) = -5.54 0
Cara lain yang paling mudah untuk membuktikannya adalah tanpa memberikan gangguan landasan, yaitu dengan memberikan nilai θ 1 = θ 2 = θ 3 = 0. Sehingga akan diperoleh,
θ 1 = θ 2 = θ 3 = 0 →
5 5 4
5 4
0 0 0