Makalah Seminar Tugas Akhir
PENGGUNAAN ADAPTIVE NOISE CANCELLATION (ANC) UNTUK PENEKANAN DERAU PADA PERCAKAPAN TELEPON
Syaiful Amri[1], Achmad Hidayatno, ST, MT[2], Darjat, ST, MT[2]
The problems that occur when put through a phone conversation on a noisy environment, is the background voice that caught by a microphone. Background voice make the information can’t clearly heard by the opponent to speak. This rises the duration of telephone conversation because the conversation must be repeated until the information clearly heard. This interference will be felt, because the cost of a telephone conversation at this time is very expensive.
There is a method to minimize the background voice by using an adaptive filter. In this final task we use Recursive Least Square (RLS) algorithm simulated using MATLAB 7.6 program.
The experiment done by giving a voice input data in *.wav form which has 5,6 kHz (GSM half rate), 8 kHz (GSM AMR standard) and 13 kHz (GSM full rate) frequency samplings. Then we adjust the adaptive filter parameter that is filter length (l) and forgetting factor () in order to get the value of the cost function. For the filter length we use 1 – 32 and for the forgetting factor () we use 0.6, 0.7, 0.8, 0.9, 0.995, and 0.999. Results obtained from the experiment show that filter reach optimal conditions on the value of forgetting factor 0.999 (near 1) and in a certain filter length. At optimal conditions, the output signal of filtration has been freed from the background noise and telephone conversation clearly heard.
Keyword : RLS, forgetting factor, filter length, frequency sampling.
I. PENDAHULUAN
1.1 Latar Belakang
Pada saat telepon genggam digunakan pada lingkungan yang bising/berderau, derau yang ada akan ikut tertangkap oleh mikrofon telepon genggam. Sehingga informasi yang disampaikan tidak jelas terdengar oleh lawan bicara. Hal ini menimbulkan durasi penggunaan telepon genggam yang lebih lama, karena percakapan telepon harus diulang – ulang sampai informasi dapat terdengar jelas. Gangguan ini akan sangat terasa mengingat biaya percakapan telepon saat ini sangat mahal.
Untuk membantu mendapatkan sinyal suara yang bebas dari pengaruh derau, sering digunakan suatu perangkat atau alat tambahan yang dinamakan tapis. Tapis yang umum dikenal biasanya bekerja dengan cara melewatkan sinyal dengan karakteristik (bentuk gelombang, frekuensi, fase dan amplitude) tertentu. Dengan menggunakan tapis dapat diperoleh sinyal yang terbebas dari derau dengan cara membangkitkan sinyal yang serupa dengan derau dan mengurangkannya dengan sinyal yang bercampur dengan derau. Sehingga diperoleh sinyal yang terbebas dari pengaruh derau.
Salah satu tapis yang dapat digunakan untuk menekan derau pada sinyal informasi adalah tapis adaptif. Tapis adaptif merupakan tapis digital yang menggunakan umpan balik untuk menemukan nilai koefisien tapis terbaik yang dipakai untuk memperoleh sinyal yang diinginkan. Tapis adaptif sudah mulai banyak digunakan pada perangkat – perangkat komunikasi seperti telepon selular, kamera digital, dan juga peralatan medis.
1.2 Tujuan
Tujuan pembuatan tugas akhir ini adalah
membuat aplikasi untuk
mengurangi/menghilangkan derau pada perangkat telepon genggam akibat percakapan pada lingkungan berderau dengan menggunakan tapis adaptif. Tapis adaptif yang dikembangkan pada tugas akhir ini menggunakan tapis FIR (Finite Impulse Response) yang menerapkan algoritma RLS (Recursive Least Squre).
1.3 Pembatasan Masalah
Agar pembahasan atau analisis tidak melebar dan terarah, maka permasalahan dibatasi pada : 1. Percakapan telepon hanya terjadi satu arah dan
mengabaikan adanya efek echo, baik elektrik echo maupun akustik echo.
2. Data masukan berupa suara percapakapan telpon satu arah yang bercapur dengan suara derau (suara air dan suara angin).
3. Format data masukan yang digunakan adalah *.wav.
4. Proses pengolahan suara – suara masukan dilakukan dengan bantuan program Cool Edit Pro versi 2.0.
5. Tapis yang digunakan adalah tapis FIR yang bobotnya diperbaharui secara adaptif dengan algoritma RLS.
6. Pembuatan program dilakukan dengan menggunakan MATLAB 7.6.
II. LANDASAN TEORI
2.1 Tapis
Pada pemrosesan sinyal, tapis adalah sebuah sistem atau jaringan yang akan secara selektif merubah karakteristik (bentuk gelombang, frekuensi, fase dan amplitudo) dari sebuah sinyal. Ada dua jenis tapis yang biasa digunakan, yaitu
tapis analog dan tapis digital. Tapis analog adalah suatu instrumen elektronika berupa rangkaian elektronika analog yang biasanya terdiri dari komponen elektronika seperti resistor, kapasitor, transistor, dan op-amp. Tapis digital adalah semua tapis elektronik yang bekerja dengan menerapkan operasi matematika digital pada pemrosesannya. Tapis digital dapat diwakili oleh prosesor digital berupa PC (Personal Computer) atau DSP (Digital Signal Processing) Chip.
Tapis Finite Impulse Response (FIR) merupakan salah satu tapis digital yang mempunyai tanggapan impuls yang berhingga. Beberapa kelebihan tapis FIR adalah memiliki tanggapan fase yang linier dan sifatnya yang selalu stabil. Karakteristik dasar dari tapis FIR menurut persamaan berikut :
( ) = ℎ( ) ( − ) (2.1)
( ) = ℎ( ) (2.2)
dengan :
x(n) = sinyal masukan tapis y(n) = sinyal keluaran tapis
h(k), k =0,1,….N-1 adalah koefisien tanggapan tapis
H(z) adalah fungsi sistem N adalah panjang tapis
Blok diagram tapis FIR dapat dilihat pada gambar 2.1 berikut ini. x(n) adalah sinyal masukan dan y(n) adalah sinyal keluaran tapis.
Gambar 2.1 Bentuk transversal tapis FIR
2.2 Sistem Adaptif
Sistem adaptif adalah sistem yang mampu menyesuaikan dan beradaptasi langsung dengan setiap perubahan yang terjadi di lingkungan sekitar maupun dengan perubahan kondisi yang terjadi pada sistem itu sendiri.
Salah satu contoh dari sistem adaptif adalah tapis adaptif. Tapis adaptif terdiri dari dua bagian yaitu tapis digital yang memiliki koefisien yang dapat diubah dan suatu algoritma adaptif yang digunakan untuk mengubah atau memperbaharui koefisien dari tapis digital tersebut.
Penerapan sistem adaptif yang digunakan dalam penelitian ini adalah penghapusan derau. Gambar blok arsitektur tapis adaptif pada rangkaian penghapus derau adalah sebagai berikut.
Gambar 2.2 Blok diagram tapis adaptif pada sistem penekanan derau
2.3 Adaptive Noise Cancellation (ANC)
Adaptive noise cancellation adalah cara untuk mengurangi/menghilangkan derau dengan cara membangkitkan sinyal yang akan mengurangi atau menghilangkan noise tersebut. Istilah adaptive menunjukkan bahwa dalam memperoleh sinyal penghilang noise, sistem akan melakukan adaptasi terhadap noise yang sudah ada, dan melakukan pendekatan - pendekatan sehingga diperoleh sinyal yang benar – benar mampu menghilangkan noise yang ada. Pada Gambar 2.2 diatas sinyal masukan d(n) adalah penjumlahan dari sinyal suara s(n) dengan derau yang menyertai sinyal suara tersebut x(n).
d(n) = s(n) + x(n) ... (2.3) Sinyal masukan pada tapis adaptif x’(n) adalah sinyal derau yang dicuplik dari sumber derau yang menginterferensi sinyal suara, sehingga x’(n) merupakan sinyal yang berkorelasi dengan x(n). Pada tapis adaptif digunakan umpan balik untuk menentukan nilai koefisien tapis setiap ordenya, sehingga diperoleh hasil pendekatan noise yang bercampur dengan sinyal suara masukan x’’(n). Pada kondisi akhir penapisan, diharapkan x’’(n) = x (n) sehingga sinyal e(n) hanya mengandung sinyal informasi x(n), atau dengan kata lain, sinyal keluaran adalah sinyal suara yang telah terbebas dari derau.
2.4 Recursive Least Square (RLS)
Inti dari algoritma RLS adalah meminimalkan nilai cost function ( ) yang didefinisikan sebagai hasil penjumlahan kuadrat error.
( ) = | ( )| ... (2.4)
Dimana disebut sebagai forgetting factor, yaitu bilangan positif yang sangat mendekati, tetapi kuang dari 1 (0 < < 1).
Proses adaptif algoritma RLS mempunyai langkah – langkah sebagai berikut :
1. Inisialisasi bobot awal filter dan (0). Nilai (0) = . I merupakan matriks identitas dan adalah konstanta positif yang nilainya besar. Sedangkan nilai adalah konstanta positif yang sangat mendekati, tetapi kurang dari 1. Pada kondisi awal (n = 0), bobot filter (0) adalah matriks 0 dengan jumlah komponennya sebanyak panjang tapis (L). 2. Menghitung gain vektor
( ) = ( − 1) ( )
1 + ( ) ( − 1) ( ) ...(2.5) 3. Menghitung estimasi error
( ) = ( ) − ( − 1) ( ) . ....(2.6) 4. Update koefisien filter
( ) = ( − 1) + ′( ) ( ) ... (2.7) 5. Update error korelation matriks
( ) = ( − 1) −
( ) ( ) ( − 1) . .(2.8)
III. PERANCANGAN DAN
IMPLEMENTASI SISTEM
Pembuatan program simulasi Adaptive Noise Cancellation mengikuti diagram alir sebagai berikut.
Gambar 3.1 Diagram alir program Adaptive Noise
Cancellation
Secara umum program simulasi Adaptive Noise Cancellation ini terdiri dari tiga bagian, yaitu penentuan data masukan, proses adaptif dan penampilan hasil simulasi program.
3.1 Penentuan Data Masukan
Data masukan berupa sinyal suara dengan frekuensi cuplik 5,6 kHz (frekuensi cuplik untuk GSM half rate), 8 kHz (frekuensi cuplik untuk GSM AMR Standar) dan 13 kHz (frekuensi cuplik untuk GSM full rate).
3.2 Proses Adaptif
Proses adaptif dalam program simulasi Adaptive Noise Cancellation ini dilakukan dengan algoritma Recursive Least Square (RLS). Variabel – variable tapis yang digunakan adalah panjang tapis (l) dan forgetting factor ().
3.3 Penampilan Hasil Simulasi
Hasil simulasi ditampikan dalam bentuk nilai cost function, grafik sinyal keluaran dan sinyal suara dalam *.wav.
3.4 Menghitung Nilai MSE
Setelah diperoleh nilai cost function pada kondisi optimal, kemudian dihitung nilai MSE untuk tiap sinyal keluaran pada panjang tapis yang sama untuk masing – masing percobaan (dengan nilai berbeda) untuk mengetahui apakah derau yang ada pada sinyal masukan telah berhasil ditapis.
IV. PENGUJIAN DAN ANALISIS
Pengujian dilakukan dengan dua macam sinyal suara, yaitu :
- Sinyal suara percakapan telepon yang bercampur dengan derau suara angin.
- Sinyal suara percakapan telepon yang bercampur dengan derau suara air.
4.1 Pengujian dengan Masukan Derau
Suara Angin
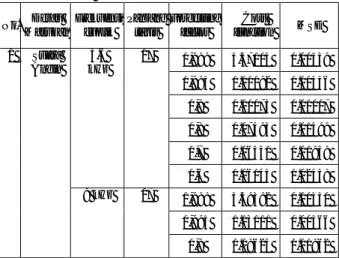
Pengujian dilakukan dengan mengubah – ubah panjang tapis dan nilai . Dari hasil pengujian ini, diperoleh data bahwa tapis mencapai kondisi optimal pada saat panjang tapis (l) = 17 ditandai dengan nilai cost function yang diperoleh kecil dan sinyal keluaran yang jernih (terbebas dari derau). Kemudian untuk kondisi ini, dilakukan pengujian untuk mengetahui pada nilai berapakah tapis mencapai kondisi optimal. Hasil pengujiannya ditunjukkan oleh tabel 4.1 berikut ini.
Tabel 4.1 Hasil pengujian dengan masukan derau suara angin No. Derau Masukan Frekuensi cuplik Panjang tapis Forgetting factor Cost function MSE 1 Suara Angin 5,6 kHz 17 0,999 5.37113 0.00539 0,995 1.11182 0.00556 0,9 0.10073 0.01007 0,8 0.07493 0.01499 0,7 0.06530 0.01959 0,6 0.06145 0.02458 8 kHz 17 0,999 5.49392 0.00550 0,995 1.13111 0.00566 0,9 0.09623 0.00962
Tabel 4.1 Hasil pengujian dengan masukan derau suara angin No. Derau Masukan Frekuensi cuplik Panjang tapis Forgetting factor Cost function MSE 0,8 0.06836 0.01367 0,7 0.05950 0.01785 0,6 0.05613 0.02245 13 kHz 17 0,999 5.55375 0.00555 0,995 1.13830 0.00569 0,9 0.08616 0.00862 0,8 0.05607 0.01121 0,7 0.04603 0.01381 0,6 0.04162 0.01665
Gambar sinyal diperoleh dari hasil pengujian dengan masukan derau suara angin dengan panjang tapis (l) = 17, = 0,999 dan frekuensi cuplik 5,6 kHz dapat dilihat pada gambar berikut ini.
Gambar 4.1 Gambar sinyal masukan pengujian dengan derau suara angin 5,6 kHz
Gambar 4.2 Gambar sinyal keluaran pengujian dengan derau suara angin 5,6 kHz
Gambar 4.3 Grafik kuadrat error pengujian dengan derau suara angin 5,6 kHz
4.2 Pengujian dengan Masukan Derau
Suara Air
Pengujian dilakukan dengan mengubah – ubah panjang tapis dan nilai . Dari hasil pengujian ini, diperoleh data bahwa tapis mencapai kondisi optimal pada saat panjang tapis (l) = 21 pada frekuensi cuplik 5,6 kHz, 22 pada frekuensi cuplik 8 kHz dan 21 pada frekuensi cuplik 13 kHz, ditandai dengan nilai cost function yang diperoleh kecil dan sinyal keluaran yang jernih (terbebas dari derau). Kemudian untuk kondisi ini, dilakukan pengujian untuk mengetahui pada nilai berapakah tapis mencapai
kondisi optimal. Hasil pengujiannya ditunjukkan oleh tabel 4.2 berikut ini.
Tabel 4.2 Hasil pengujian dengan masukan derau suara air No Derau Masukan Frekuensi cuplik Panjang tapis Forgetting factor Cost function MSE 1 Suara Air 5,6 kHz 21 0,999 5.40502 0.00543 0,995 1.12872 0.00564 0,9 0.11857 0.01186 0,8 0.10149 0.02030 0,7 0.09823 0.02947 0,6 0.10012 0.04005 8 kHz 22 0,999 5.52561 0.00553 0,995 1.14881 0.00574 0,9 0.12188 0.01219 0,8 0.10397 0.02079 0,7 0.10459 0.03138 0,6 0.10901 0.04361 13 kHz 21 0,999 5.58900 0.00559 0,995 1.15554 0.00578 0,9 0.11677 0.01168 0,8 0.09725 0.01945 0,7 0.09503 0.02851 0,6 0.09646 0.03858
Gambar sinyal diperoleh dari hasil pengujian dengan masukan derau suara air dengan panjang tapis (l) = 21, = 0,999 dan frekuensi cuplik 5,6 kHz dapat dilihat pada gambar berikut ini.
Gambar 4.4 Gambar sinyal masukan pengujian dengan derau suara air 5,6 kHz
Gambar 4.5 Gambar sinyal keluaran pengujian dengan derau suara air 5,6 kHz
Gambar 4.6 Grafik kuadrat error pengujian dengan derau suara air 5,6 kHz
V. PENUTUP 5.1 Kesimpulan
Dari pengujian yang telah dilakukan diperoleh kesimpulan bahwa:
1. Proses adaptif yang dilakukan pada setiap data masukan akan menghasilkan nilai cost function (J) yang berbeda untuk masing-masing panjang tapis yang digunakan. 2. Tingkat keberhasilan penapisan ditentukan
oleh nilai cost function (J) dan MSE. Nilai MSE yang besar menunjukkan derau yang terdapat pada sinyal keluaran besar. Nilai MSE yang kecil menunjukkan derau yang terdapat pada sinyal keluaran kecil.
3. Nilai forgetting factor () yang kecil menyebabkan pengaruh data pada iterasi sebelumnya terhadap iterasi saat ini besar. 4. Nilai cost function (J) dipengaruhi oleh
panjang tapis (l) dan nilai forgetting factor ().
5. Tapis mencapai kondisi optimal pada saat nilai forgetting factor () sangat mendekati 1 ( = 0,999) dan panjang tapis (l) tertentu. 6. Pada saat mencapai kondisi optimal, derau
yang bercampur dengan suara percakapan telepon berhasil ditapis dan suara percakapan telepon terdengar jernih.
7. Dari pengujian yang telah dilakukan terhadap sinyal suara yang bercampur dengan suara angin dengan frekuensi cuplik 5,6 kHz, 8 kHz, dan 13 kHz, tapis mencapai kondisi optimal pada saat = 0,999 dan panjang tapis (l) = 17.
8. Dari pengujian yang telah dilakukan terhadap sinyal suara yang bercampur dengan suara air dengan frekuensi cuplik 5,6 kHz, 8 kHz, dan 13 kHz, tapis mencapai kondisi optimal berturut – turut pada saat = 0,999 dan panjang tapis (l) = 21, = 0,999 dan panjang tapis (l) = 22 dan = 0,999 dan panjang tapis (l) = 21.
5.2 Saran
1. Penggunaan tapis adaptif dengan algoritma RLS dapat dikembangkan untuk aplikasi lainnya, seperti pada pembuatan film pada tempat yang bising.
2. Program simulasi ini dapat
diimplementasikan ke dalam modul Digital Signal Processor (DSP) yang telah ada di pasaran. Sehingga dapat dimanfaatkan secara nyata.
DAFTAR PUSTAKA
[1] DeFatta D. J. and Lucas J. G., Digital Signal Processing, John Wiley and Sons , 1988.
[2] Haykin S., Adaptive Filter Theory, McMaster University, prentice hall Englewood cliffs, NJ 07632, 1991.
[3] Ifeachor J. C. and Jervis B. W., Digital Signal Processing A Practical Approach, Addison-Wessley, 1993.
[4] Kuc R, Introduction To Digital Signal Processing, McGraw-Hill Book company, 1988.
[5] ____, Acoustic Echo using Digital Signal Processing,
innovexpo.itee.uq.edu.au/2003/exhibits/s365 914/thesis.pdf,Januari 2009.
[6] ____, Adaptive Multi Rate,
http://en.wikipedia.org/wiki/Adaptive_Multi-Rate .htm, Juni 2009.
[7] ____, Adaptive Noise Cancellation,
http://www.owlnet.rice.edu/~ryank ing/elec431/,Januari 2009. [8] ____, Full Rate, http://en.wikipedia.org/wiki/Full_Rate.htm, Juni 2009. [9] ____, Half Rate, http://en.wikipedia.org/wiki/Half_Rate.htm, Juni 2009.
[10] ____, Matlab® 7 Creating Graphical User Interfaces, The MathWorks, Inc, 2008.
BIOGRAFI
Syaiful Amri, lahir di Kudus, 23 Mei 1986. Menempuh pendidikan dasar di SD 1 Mejobo lulus tahun 1998, SMP 1 Kudus lulus tahun 2001 dan SMA 1 Kudus lulus tahun 2004. Saat ini
sedang menempuh
pendidikan strata satu di Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Semarang, konsentrasi Elektronika dan Telekomunikasi.
Mengetahui dan Mengesahkan Pembimbing I,
Achmad Hidayatno, ST, MT Pembimbing II,