viii
INTISARI
Kualitas air kolam ikan harus terjaga untuk menjamin kelangsungan hidup ikan. Air sungai yang masuk ke kolam menentukan kualitas air kolam. Kualitas air kolam tersebut dapat diukur dengan bantuan sensor seperti suhu, DO, pH, kekeruhan air serta konduktivitas. Permasalahan yang ada pemilik kolam perlu sering meninjau kondisi kolam untuk nilai sensor tersebut. Penelitian ini bertujuan membuat sistem telemetri antara bagian pengukur sensor serta bagian penampil untuk mempermudah pemilik kolam dalam menjaga kualitas air kolam.
Sistem telemetri dilakukan dengan cara modul terminal unit melakukan pengukuran parameter kualitas air sungai serta menentukan posisi buka-tutup pintu air kolam. Informasi tersebut kemudian dikirimkan ke modul sentral unit yang bertugas sebagai penampil secara telemetri menggunakan modul RX01-433D dan TX02-433D. Mikrokontroler Atmega8535 pada modul sentral unit digunakan untuk memproses paket data dari terminal unit yang kemudian dikirim ke komputer menggunakan kabel. Visual Basic 6.0 sebagai GUI digunakan untuk parsing paket data menjadi parameter yang ada serta menyimpan dan menampilkan ke dalam bentuk grafik.
Pengiriman paket data saat frequency deviation +/-90kHz hingga +/-180kHz dapat mengirim paket data dengan tingkat keberhasilan 100% hingga jarak 20 meter. Proses parsing paket data telah sesuai dengan informasi yang diberikan dan ditampilkan dalam grafik. Sentral unit juga dapat mengatur periode pengiriman paket data dari terminal unit serta batasan kendali masing-masing sensor pada terminal unit. Secara keseluruhan sistem mampu bekerja seusai dengan perencanaan namun pengiriman paket data tidak dapat mencapai jarak 100 meter atau sesuai dengan datasheet. Hal ini disebabkan pengaturan modul RX01-433D dan TX02-433D meliputi banyak faktor.
ix
ABSTRACT
The fish pond water must be kept in the highest quality for the life of fish. Water is the most important thing of that. The quality can be measured with the sensor of temperature, oxygen, pH, turbidy and conductivity. The problem is the owner always checking his fish pond water for many times. This research has a goal that made the telemetry system between sensor and the display to make easier the owner for keeping the quality of his fish pond water.
The telemetry system did when terminal unit will be measures the fish pond water using that sensor and control the inlet and outlet of fish pond water. Then, the information of fish pond water is sent to the central unit using RX01-433D and TX02-433D. Microcontroller Atmega8535 in central unit is used to process the package from terminal unit and will be sent to computer used a cable. Visual Basic 6.0 as the GUI will be descended the package by that parameter, saving the data and displaying into a graphic.
When the package is sent using frequency deviation from 90kHz until +/-180kHz, it can be sent 100% successful until 20 meter. The package can be parsing by that parameter and can be displayed into a graphic. Central unit can control the time of terminal unit for sending the package and the limitation of that sensor. Overall, the system works like the plan but when the package is sent, it cannot reach 100 meter or not same as the datasheet. The reason is the initialization of RX01-433D and TX02-433D has many factors.
TUGAS AKHIR
SISTEM TELEMETRI KUALITAS AIR KOLAM IKAN
MENGGUNAKAN TX02-433D DAN RX01-433D
SEBAGAI UNIT SENTRAL
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
ANTONIUS BUDI PRASETYO JATI 115114016
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
i
TUGAS AKHIR
SISTEM TELEMETRI KUALITAS AIR KOLAM IKAN
MENGGUNAKAN TX02-433D DAN RX01-433D
SEBAGAI UNIT SENTRAL
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
ANTONIUS BUDI PRASETYO JATI 115114016
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
THE TELEMETRY SYSTEM OF FISH POND WATER
QUALITY USING TX02-433D AND RX01-433D
AS A CENTRAL UNIT
Presented As Partial Fulfillment Of The Requirements To Obtain The Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
ANTONIUS BUDI PRASETYO JATI 115114016
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
v
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 10 November 2015
vi
HALAMAN PERSEMBAHAN DAN MOTO HIDUP
MOTTO :
Hidup itu penuh dengan tantangan
Teruslah berjuang untuk menghadapi tantangan itu
Skripsi ini ku
persembahkan untuk…..
Yesus Kristus,Bunda Maria,Saint Antonius Pembimbingku yang setia
Eyang Kakung dan Eyang Putri di surga
Bapak Blasius Basuki dan Mamah Maria Goretti yang aku banggakan
Mas Jati Mbak Idha dan Karina yang aku cintai
Veronica Vania atas komitmen dan dukungan yang harus diperjuangkan
viii
INTISARI
Kualitas air kolam ikan harus terjaga untuk menjamin kelangsungan hidup ikan. Air sungai yang masuk ke kolam menentukan kualitas air kolam. Kualitas air kolam tersebut dapat diukur dengan bantuan sensor seperti suhu, DO, pH, kekeruhan air serta konduktivitas. Permasalahan yang ada pemilik kolam perlu sering meninjau kondisi kolam untuk nilai sensor tersebut. Penelitian ini bertujuan membuat sistem telemetri antara bagian pengukur sensor serta bagian penampil untuk mempermudah pemilik kolam dalam menjaga kualitas air kolam.
Sistem telemetri dilakukan dengan cara modul terminal unit melakukan pengukuran parameter kualitas air sungai serta menentukan posisi buka-tutup pintu air kolam. Informasi tersebut kemudian dikirimkan ke modul sentral unit yang bertugas sebagai penampil secara telemetri menggunakan modul RX01-433D dan TX02-433D. Mikrokontroler Atmega8535 pada modul sentral unit digunakan untuk memproses paket data dari terminal unit yang kemudian dikirim ke komputer menggunakan kabel. Visual Basic 6.0 sebagai GUI digunakan untuk parsing paket data menjadi parameter yang ada serta menyimpan dan menampilkan ke dalam bentuk grafik.
Pengiriman paket data saat frequency deviation +/-90kHz hingga +/-180kHz dapat mengirim paket data dengan tingkat keberhasilan 100% hingga jarak 20 meter. Proses parsing paket data telah sesuai dengan informasi yang diberikan dan ditampilkan dalam grafik. Sentral unit juga dapat mengatur periode pengiriman paket data dari terminal unit serta batasan kendali masing-masing sensor pada terminal unit. Secara keseluruhan sistem mampu bekerja seusai dengan perencanaan namun pengiriman paket data tidak dapat mencapai jarak 100 meter atau sesuai dengan datasheet. Hal ini disebabkan pengaturan modul RX01-433D dan TX02-433D meliputi banyak faktor.
ix
ABSTRACT
The fish pond water must be kept in the highest quality for the life of fish. Water is the most important thing of that. The quality can be measured with the sensor of temperature, oxygen, pH, turbidy and conductivity. The problem is the owner always checking his fish pond water for many times. This research has a goal that made the telemetry system between sensor and the display to make easier the owner for keeping the quality of his fish pond water.
The telemetry system did when terminal unit will be measures the fish pond water using that sensor and control the inlet and outlet of fish pond water. Then, the information of fish pond water is sent to the central unit using RX01-433D and TX02-433D. Microcontroller Atmega8535 in central unit is used to process the package from terminal unit and will be sent to computer used a cable. Visual Basic 6.0 as the GUI will be descended the package by that parameter, saving the data and displaying into a graphic.
When the package is sent using frequency deviation from 90kHz until +/-180kHz, it can be sent 100% successful until 20 meter. The package can be parsing by that parameter and can be displayed into a graphic. Central unit can control the time of terminal unit for sending the package and the limitation of that sensor. Overall, the system works like the plan but when the package is sent, it cannot reach 100 meter or not same as the datasheet. The reason is the initialization of RX01-433D and TX02-433D has many factors.
x
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Tuhan Yesus Kristus karena telah memberikan berkat-Nya sehingga penulis dapat menyelesaikan laporan akhir ini dengan baik. Laporan akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana.
Penulis mengucapkan terima kasih kepada :
1. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta. 2. Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
3. Martanto, S.T., M.T., dosen pembimbing yang dengan penuh pengertian dan ketulusan hati memberi bimbingan, kritik, saran, serta motivasi dalam penulisan skripsi ini.
4. Petrus Setyo Prabowo, S.T., M.T., Ir. Theresia Prima, M.T. dosen penguji yang telah memberikan masukan, bimbingan, saran dalam merevisi skripsi ini.
5. Bapak, Mamah, Mas Jati, Mbak Idha, Karina, Vanya atas dukungan, doa, cinta, perhatian, kasih sayang yang tiada henti.
6. Staff sekretariat Teknik Elektro, atas bantuan dalam melayani mahasiswa.
7. Kawan-kawan seperjuangan angkatan 2011 Teknik Elektro, dan kawan-kawan kost Buah Manggis yang mendukung saya dalam mendukung dalam menyelesaikan tugas akhir ini.
8. Epan Supaganda, atas pinjaman kamar dan fasilitas-fasilitas yang diberikan.
9. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang telah diberikan dalam penyelesaian skripsi ini.
Penulis menyadari bahwa dalam penyusunan laporan akhir ini masih mengalami kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan, kritik dan saran yang membangun agar skripsi ini menjadi lebih baik. Dan semoga skripsi ini dapat bermanfaat sebagaimana mestinya.
Penulis
xi
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xviii
BAB I : PENDAHULUAN
1.1. Latar Belakang ... 11.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II : DASAR TEORI
2.1. Kualitas Air Kolam Ikan... 52.1.1. Temperatur Air ... 5
2.1.2. Derajat Keasaman Air (pH) ... 5
2.1.3. Derajat Kekeruhan ... 6
2.1.4. Kandungan Oksigen ... 6
2.1.5. Konduktivitas ... 6
xii
2.2.1. Data Pengujian Pengendalian Suhu Air... 9
2.2.2. Data Pengujian Pengendalian pH Air ... 9
2.2.3. Data Pengujian Pengendalian Kekeruhan Air ... 10
2.2.4. Data Pengujian Pengendalian Kandungan Oksigen (DO) ... 11
2.2.5. Data Pengujian Pengendalian Konduktivitas Air ... 11
2.3. Regulator Tegangan ... 12
2.3.1. PENGATUR TEGANGAN IC 78XX ... 12
2.4. Module PL2303 ... 14
2.5. Mikrokontroler AVR ... 15
2.5.1. Arsitektur Mikrokontroler AVR 8535 ... 15
2.6. Port Input / Output ... 18
2.7. Komunikasi Serial USART (Universal Synchronous and Asynchronous serial Receiver and Transmitter) ... 18
2.8. Serial Pheripheral Interface (SPI) ... 21
2.9. RX01-433D ... 23
2.10. TX02-433D ... 25
2.11. LCD 16x2 ... 27
2.12. Visual Basic 6.0 ... 28
BAB III : PERANCANGAN PENELITIAN
3.1. Perancangan Regulator Tegangan ... 313.2. Perancangan Minimum Sistem dan Display LCD 16x2 ... 32
3.3. Perancangan Program ... 33
3.3.1. Subrutin Setting Waktu Pengiriman VB ... 39
3.3.2. Subrutin Setting Batas Suhu atau pH VB ... 40
3.3.3. Subrutin Setting Batas DO, Kekeruhan, Konduktifitas VB ... 40
3.3.4. Subrutin Ambil Data Sensor VB ... 41
3.3.5. Subrutin Terima Paket Data VB ... 42
3.4. Program Utama Mikrokontroler ATMega8535 ... 44
3.4.1. Subrutin Terima Paket Data ... 45
3.4.2. Subrutin Setting Waktu Pengiriman ... 46
xiii
3.4.4. Subrutin Ambil Data Sensor ... 47
BAB IV HASIL DAN PEMBAHASAN
4.1. Bentuk Fisik Sistem ... 504.2. Subsistem Elektronik ... 52
4.2.1. Rangkaian LCD 16x2 ... 52
4.2.2. Rangkaian TX02-433D dan RX01-433D ... 52
4.2.3. Rangkaian Mikrokontroler dan Catu Daya ... 53
4.3. Cara Penggunaan Alat ... 53
4.4. Pengujian TX02-433D dan RX01-433D ... 54
4.5. Pengujian Sistem ... 56
4.5.1. Pengujian Terima Paket Data ... 57
4.5.2. Pengujian Terima Paket Data GUI ... 59
4.5.3. Pengujian Kirim Paket Data dan GUI ... 61
4.5.4. Pengujian Kirim Paket Data Atur Periode Pengiriman Modul Terminal Unit……. ... 62
4.5.5. Pengujian Kirim Paket Data Atur Batas Kendali Sensor Suhu dan PH Modul Terminal Unit ... 64
4.5.6. Pengujian Kirim Paket Data Atur Batas Kendali Sensor DO, Kekeruhan dan Konduktifitas Modul Terminal Unit ... 65
4.5.7. Pengujian Kirim Paket Data Minta Data Salah Satu Sensor Modul Terminal Unit ... 67
4.5.8. Pengujian Program Menampilkan Data Pada Grafik ... 69
4.6. Pengujian Catu Daya ... 71
BAB V : KESIMPULAN DAN SARAN
5.1. Kesimpulan ... 725.2. Saran…… ... 72
DAFTAR PUSTAKA
LAMPIRAN
xiv
xv
DAFTAR GAMBAR
Hal
Gambar 1.1. Bagan Proses Pengiriman Paket Data ... 4
Gambar 2.1. Posisi bak prototype ... 7
Gambar 2.2. Gambar plan pengendalian air kolam ... 7
Gambar 2.3. Rangkaian dasar regulator 78XX ... 13
Gambar 2.4. Module PL2303 ... 14
Gambar 2.5. Blok diagram fungsional mikrokontroler ATMega8535 ... 16
Gambar 2.6. Pin ATMega8535 ... 17
Gambar 2.7. Blok diagram USART ... 19
Gambar 2.8. Rumus perhitungan nilai UBRR ... 20
Gambar 2.9. USART data register ... 20
Gambar 2.10. Control and status register A ... 20
Gambar 2.11. Control and status register B ... 21
Gambar 2.12. Control and status register C ... 21
Gambar 2.13. Koneksi master-slave dengan SPI ... 21
Gambar 2.14. SPI data register ... 22
Gambar 2.15. SPI control register ... 22
Gambar 2.16. SPI status register ... 22
Gambar 2.17. Konfigurasi Pin RX01-433D ... 23
Gambar 2.18. Blok diagram RX01-433D... 23
Gambar 2.19. Skematik RX01-433D ... 24
Gambar 2.20. Konfigurasi pin TX02-433D ... 25
Gambar 2.21. Blok diagram TX02-433D ... 26
Gambar 2.22. Skematik TX02-433D ... 26
Gambar 2.23. LCD 16x2 M168535 ... 27
Gambar 3.1. Konsep perancangan ... 29
Gambar 3.2. Rangkaian catu daya ... 31
Gambar 3.3. Minimum sistem dan LCD 16x2 ... 32
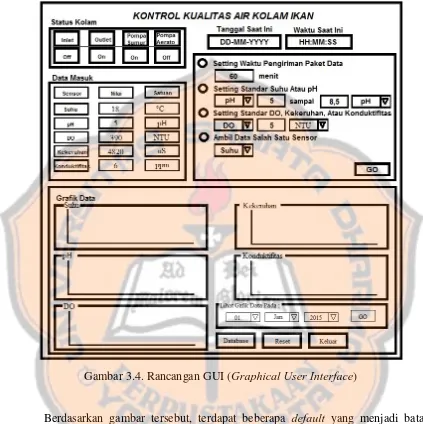
Gambar 3.4. Rancangan GUI (Graphical User Interface) ... 34
xvi
Gambar 3.6. Rancangan grafik data pH ... 35
Gambar 3.7. Rancangan grafik data DO ... 35
Gambar 3.8. Rancangan grafik data kekeruhan... 36
Gambar 3.9. Rancangan grafik data konduktifitas ... 36
Gambar 3.10. Diagram alir utama GUI ... 37
Gambar 3.11. (Lanjutan) Diagram alir utama GUI ... 38
Gambar 3.12. Diagram alir subrutin setting waktu pengiriman VB ... 39
Gambar 3.13. Diagram alir subrutin setting batas suhu atau pH VB ... 40
Gambar 3.14. Diagram alir subrutin setting DO, kekeruhan, konduktifitas VB ... 41
Gambar 3.15. Diagram alir subrutin ambil data sensor VB ... 42
Gambar 3.16. Diagram alir terima paket data VB ... 43
Gambar 3.17. Diagram alir program utama Mikrokontroler ATMega8535 ... 44
Gambar 3.18. Diagram alir terima paket data ... 45
Gambar 3.19. Subrutin setting waktu pengiriman ... 46
Gambar 3.20. Subrutin setting waktu pengiriman ... 47
Gambar 3.21. Diagram alir ambil data sensor ... 48
Gambar 3.22. (Lanjutan) Diagram alir ambil data sensor ... 49
Gambar 4.1. Bentuk fisik sistem tampak depan ... 50
Gambar 4.2. Bentuk fisik sistem tampak samping kanan ... 51
Gambar 4.3. Bentuk fisik sistem tampak samping kiri ... 51
Gambar 4.4. Bentuk fisik sistem tampak belakang ... 51
Gambar 4.5. Rangkaian LCD 16x2 ... 52
Gambar 4.6. Rangkaian TX02-433D dan RX01-433D ... 52
Gambar 4.7. Rangkaian mikrokontroler dan catu daya ... 53
Gambar 4.8. Tampilan LCD 16x2 kirim karakter “C” modul sentral unit ... 56
Gambar 4.9. Tampilan LCD 16x2 terima karakter “C” modul terminal unit ... 56
Gambar 4.10. Tampilan LCD 16x2 tidak terima data ... 56
Gambar 4.11. Tampilan LCD 16x2 terima paket data pertama ... 58
Gambar 4.12. Tampilan LCD 16x2 terima paket data kedua ... 58
Gambar 4.13. Tampilan LCD 16x2 terima paket data ... 58
Gambar 4.14. Tampilan LCD 16x2 menunggu paket data ... 59
Gambar 4.15. Tampilan GUI ... 59
xvii
Gambar 4.17. Tampilan GUI pemisahan paket data ... 60
Gambar 4.18. Lokasi penyimpanan data ... 60
Gambar 4.19. Data yang berhasil disimpan pada microsoft excel 2007 ... 60
Gambar 4.20. Tampilan visual basic kolom menu ... 63
Gambar 4.21. Tampilan GUI kirim setting waktu ... 63
Gambar 4.22. Tampilan LCD 16x2 kirim paket data setting waktu sentral unit... 63
Gambar 4.23. Tampilan LCD 16x2 terima paket data setting waktu terminal unit ... 63
Gambar 4.24. Tampilan GUI kirim setting standar suhu ... 64
Gambar 4.25. Tampilan LCD 16x2 kirim setting standar suhu sentral unit... 64
Gambar 4.26. Tampilan LCD 16x2 kirim setting standar suhu terminal unit ... 64
Gambar 4.27. Tampilan GUI kirim setting standar PH ... 65
Gambar 4.28. Tampilan LCD 16x2 kirim setting standar PH sentral unit ... 65
Gambar 4.29. Tampilan LCD 16x2 kirim setting standar PH terminal unit ... 65
Gambar 4.30. Tampilan GUI kirim setting standar DO ... 65
Gambar 4.31. Tampilan LCD 16x2 kirim setting standar DO sentral unit ... 66
Gambar 4.32. Tampilan LCD 16x2 kirim setting standar DO terminal unit ... 66
Gambar 4.33. Tampilan GUI kirim setting standar kekeruhan ... 66
Gambar 4.34. Tampilan LCD 16x2 kirim setting standar kekeruhan sentral unit ... 66
Gambar 4.35. Tampilan LCD 16x2 kirim setting standar kekeruhan terminal unit ... 66
Gambar 4.36. Tampilan GUI kirim setting standar konduktifitas ... 66
Gambar 4.37. Tampilan LCD 16x2 kirim setting standar konduktifitas sentral unit ... 67
Gambar 4.38. Tampilan LCD 16x2 kirim setting standar konduktifitas terminal unit ... 67
Gambar 4.39. Tampilan GUI minta data sensor suhu ... 68
Gambar 4.40. Tampilan LCD 16x2 minta data sensor suhu sentral unit ... 68
Gambar 4.41. Tampilan LCD 16x2 minta data sensor suhu sentral unit ... 68
Gambar 4.42. Tampilan LCD 16x2 terima paket data pertama sentral unit ... 68
Gambar 4.43. Tampilan LCD 16x2 terima paket data kedua sentral unit ... 68
Gambar 4.44. Tampilan LCD 16x2 terima paket data sensor suhu sentral unit ... 69
Gambar 4.45. Tampilan GUI terima paket data sensor suhu ... 69
Gambar 4.46. Tampilan grafik pada GUI sebelum bergeser ... 69
Gambar 4.47. Tampilan grafik pada GUI setelah bergeser ... 70
xviii
DAFTAR TABEL
Hal
Tabel.2.1. Aksi pengendalian ... 8
Tabel.2.2. Data pengujian pengendalian suhu naik ... 9
Tabel.2.3. Data pengujian pengendalian suhu turun ... 9
Tabel.2.4. Data pengujian pH asam ... 10
Tabel.2.5. Data pengujian pH basa ... 10
Tabel.2.6. Data pengujian kekeruhan air ... 10
Tabel.2.7. (Lanjutan) Data pengujian kekeruhan air ... 11
Tabel.2.8. Data pengujian kandungan oksigen ... 11
Tabel.2.9. Data pengujian konduktivitas air ... 11
Tabel.2.10. (Lanjutan) Data Pengujian Konduktivitas air ... 12
Tabel.2.11. Tipe IC 78XX... 12
Tabel.2.12. (Lanjutan) Tipe IC 78XX ... 13
Tabel.2.13. Fungsi pin RX01-433D ... 24
Tabel.2.14. (Lanjutan) Fungsi pin RX01-433D ... 25
Tabel.2.15. Fungsi pin TX02-433D ... 27
Tabel.2.16. Konfigurasi pin LCD M168535 ... 28
Tabel.3.1. Fungsi port ATMega8535 ... 33
Tabel.3.2. Rancangan format database ... 37
Tabel.3.3. Pengaturan karakter ambil data salah satu sensor ... 41
Tabel.3.4. (Lanjutan) Pengaturan karakter ambil data salah satu sensor ... 42
Tabel.3.5. Paket data terima ... 43
Tabel.3.6. Format data setting ... 47
Tabel.4.1. Pengujian komunikasi frekuensi 434Mhz ... 55
Tabel.4.2. Pengujian komunikasi frekuensi 435Mhz ... 55
Tabel.4.3. Pengujian terima paket data dari terminal unit ... 57
Tabel.4.4. Contoh data yang dikirim ... 58
Tabel.4.5. Pengujian kirim paket data ... 61
Tabel.4.6. (Lanjutan) Pengujian kirim paket data ... 62
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Usaha budidaya ikan air tawar semakin hari semakin menggiurkan. Menurut laporan Badan Pangan PBB/ Food and Agriculture Organization (FAO) pada tahun 2021 konsumsi ikan perkapita penduduk dunia akan mencapai 19,6 kg per tahun. Meski saat ini konsumsi ikan lebih banyak dipasok oleh ikan laut, namun pada tahun 2018 produksi ikan air tawar akan menyalip produksi perikanan tangkap. Hal ini disebabkan karena produksi perikanan tangkap akan mengalami penurunan akibat overfishing. Ikan di laut semakin sulit didapatkan. Bahkan bila tidak ada perubahan model produksi, para peneliti meramalkan pada tahun 2048 tak ada lagi ikan untuk ditangkap[1].
Kenaikan produksi budidaya ikan dalam kolam air tawar cukup pesat yaitu berkisar 11 persen setiap tahun. Hal ini menujukkan ada gairah besar di masyarakat untuk mengembangkan usaha budidaya ikan air tawar. Tentunya pertumbuhan produksi ini mengacu pada permintaan pasar yang terus meningkat[1]. Dalam pemeliharaannya kualitas air untuk pemeliharaan ikan, tidak terlalu keruh dan tidak tercemar bahan-bahan kimia beracun, dan minyak/limbah pabrik, dan juga harus terhindar dari hama dan penyakit. Dengan ukuran kolam yang cukup besar, tentu sangat sulit menjaga kualitas air tersebut untuk menghasilkan ikan yang banyak dan memiliki kualitas yang baik. Tidak sedikit ikan yang mati karena kualitas air yang buruk, sehingga produksi ikan pun menjadi menurun dan pengusah mengalami kerugian yang besar[2].
Air merupakan faktor paling utama dalam kehidupan ikan. Faktor lingkungan seperti air, temperature, derajat keasaman (pH), kandungan oksigen (DO), dan lain-lain sangat diperlukan untuk biota air tawar (ikan, plankton, ganggang, zooplankton, dll). Kesesuaian lingkungan hidup untuk setiap ikan berbeda tergantung pada jenis ikan. Jenis ikan tertentu yang sesuai dengan kondisi lingkungannya dapat bertumbuh dan berkembang[3].
pengendalian aerator, dan penjernihan air. Sistem tersebut dilengkapi dengan mikrokontroler dalam menentukan aksi yang akan dilakuan berdasarkan masukkan hasil pengukuran[4].
Berdasarkan hal tersebut penulis berusaha mengembangkan penelitian tersebut dengan membuat sistem telemetri antara sentral unit yang bertugas sebagai pengendali utama sistem tersebut dengan terminal unit yang bertugas mengumpulkan data-data dari parameter suhu, DO, pH, kekeruhan air serta konduktivitas air kolam. Data-data yang telah diterima sentral unit kemudian akan ditampilkan pada komputer berupa nilai dan grafik suhu, DO, pH, kekeruhan air serta konduktivitas air kolam sebagai user interface.
1.2.
Tujuan dan Manfaat
Tujuan penelitian ini yaitu:
a. Menerima dan menampilkan data-data dari parameter suhu, DO, pH, kekeruhan air serta konduktivitas air kolam dalam bentuk grafik pada PC (Personal Computer) yang dikirim melalui terminal unit, serta menyimpan data-data tersebut pada database.
b. Mengatur batasan standar air pada masing-masing parameter suhu, DO, pH, kekeruhan air serta konduktivitas air kolam melalui terminal unit.
Manfaat dalam penelitian ini adalah membantu peternak ikan air tawar untuk memonitoring kualitas air kolam ikan secara jarak jauh.
1.3.
Batasan Masalah
Batasan Masalah dalam penelitian ini berisikan tentang batasan komponen yang akan digunakan, antara lain:
a. Menggunakan ATMEGA 8535 sebagai mikrokontroler.
b. TX02-433D sebagai pengirim instruksi ke terminal unit dan RX01-433D sebagai penerima paket data dari terminal unit.
c. Proses pengiriman perintah dan pengambilan paket data dilakukan secara bergantian atau half duplex.
e. Paket data yang dikirim dari terminal unit diterima sebanyak dua kali dengan isi paket data pertama dan kedua sama.
f. Paket data pertama dan kedua dibandingkan untuk memastikan isi paket data yang diterima sesuai dengan paket data pada terminal unit .
g. Paket data yang diterima akan ditampilkan pada monitor komputer dengan aplikasi Visual Basic dan disimpan pada database menggunakan Microsoft Excel.
1.4.
Metodologi Penelitian
Metode penelitian yang digunakan adalah:
a. Studi literatur berupa pengumpulan referensi buku, internet, jurnal, dan artikel.
b. Studi kasus terhadap alat yang sudah dibuat sebelumnya. Tahap ini dilakukan untuk memahami prinsip kerja dari alat yang telah dibuat sebelumnya.
c. Perancangan sistem hardware dan software. Tahap ini bertujuan mencari bentuk model yang optimal dari sistem yang dibuat dengan mempertimbangkan dari berbagai faktor permasalahan dan kebutuhan yang telah ditentukan.
d. Pembuatan sistem hardware dan software. Sistem bekerja apabila, paket data yang dikirimkan dari terminal unit dapat diterima di sentral unit menggunakan RX01-433D, memberikan instruksi ke terminal unit untuk mengirimkan data dari salah satu parameter menggunakan TX02-433D dan menampilkan data pada komputer/laptop menggunakan program Visual Basic.
e. Proses pengambilan data dilakukan dengan bantuan terminal unit untuk mendapatkan data dari setiap parameter yang kemudian dibuat dalam sebuah paket data dan dikirimkan dalam bentuk paket data. Paket data tersebut kemudian akan diuraikan sesuai dengan satuan pada setiap parameter yang dibuat menjadi bentuk grafik dan ditampilkan pada Visual Basic.
f. Instruksi yang dikirimkan ke terminal unit adalah mengubah batasan air pada masing-masing standar air parameter suhu, DO, pH, kekeruhan air serta konduktivitas air kolam, meminta data pada salah satu parameter yang diinginkan user, serta mengatur waktu pengiriman paket data dari terminal unit.
5
BAB II
DASAR TEORI
2.1. Kualitas Air Kolam Ikan
Faktor lingkungan seperti air, temperatur, derajat keasaman (pH), kandungan oksigen (DO), dan lain-lain sangat diperlukan untuk biota air tawar (ikan, plankton, ganggang, zooplankton, dll). Kesesuaian lingkungan hidup untuk setiap ikan berbeda tergantung pada jenis ikan, jenis ikan tertentu yang sesuai dengan kondisi lingkungannya dapat bertumbuh dan berkembang[3]. Sebaliknya, jika keadaan tidak sesuai dapat menghambat pertumbuhan dan perkembangannya.
2.1.1. Temperatur Air
Temperatur air sangat berpengaruh pada pertumbuhan dan perkembangan ikan. Temperatur air yang tidak cocok, misalnya terlalu tinggi atau terlalu rendah dapat menyebabkan ikan tidak dapat bertumbuh dengan baik. Temperatur yang cocok untuk pertumbuhan ikan adalah berkisar antara 15ºC - 30ºC dan perbedaan suhu antara siang dan malam kurang dari 5ºC. Perubahan suhu yang mendadak berpengaruh buruk pada kehidupan ikan karena ikan tidak dapat hidup dengan baik pada suhu yang telalu dingin atau terlalu panas[3].
2.1.2. Derajat Keasaman Air (pH)
2.1.3. Derajat Kekeruhan
Air yang terlalu keruh dapat menyebabkan ikan mengalami gangguan pernafasan (sulit bernafas) karena insangnya terganggu oleh kotoran. Di samping itu juga air keruh dapat menurunkan atau dapat melenyapkan selera makan karena daya penglihatan ikan terganggu. Batas kekeruhan dapat diukur dengan memasukan benda yang terang (berwarna putih) sampai kedalaman 40cm[3]. Jika masih kelihatan, maka kekeruhan air masih belum mengganggu kehidupan ikan. Satuan yang biasa dipakai dalam kekeruhan ialah NTU (Nephelometric Turbidity Units). Kekeruahan juga sering digambarkan dengan dalam satuan TSS (Total Suspended Solids) atau mg/l (miligram per liter). Air murni memiliki NTU kurang dari 1 atau 0 mg/l[5]. Standart kekeruhan air yang baik bagi ikan harus kurang dari 500 NTU[5], bila kekeruhan berada di atas 500 NTU dapat mengganggu pertumbuhan ikan.
2.1.4. Kandungan Oksigen
Oksigen sangat diperlukan untuk pernapasan dan metabolisme ikan serta jasad – jasad renik dalam air. Kandungan oksigen yang tidak mencukupi kebutuhan ikan dan biota lainya dapat menyebabkan penurunan daya hidup ikan. Kandungan oksigen terlarut dalam air cocok untuk kehidupan dan pertumbuhan ikan gurami sebesar 5ppm, untuk ikan nila lebih dari 3ppm, dan ikan mas berkisar 5 – 7ppm (5 – 7cc /liter air)[3]. Pengaliran air yang baik dan permukaan kolam yang selalu terbuka dapat meningkatkan kadar oksigen dalam air.
2.1.5. Konduktivitas
Nilai konduktivitas merupakan ukuran terhadap konsentrasi total elektrolit di dalam air. Kandungan elektrolit yang pada prinsipnya merupakan garam-garam yang terlarut dalam air, berkaitan dengan kemampuan air didalam menghantarkan arus listrik. Standar konduktivitas yang baik bagi ikan ialah kurang dari 5000μS/cm dengan suhu 25ºC[6]. Bila konduktivitas berada diatas 5000μS/cm maka akan mengganggu kehidupan ikan.
2.2. State of The Art
Gambar 2.1. Posisi bak prototipe
Posisi bak prototipe merupakan penjelasan tentang aliran air pada masing-masing bak sesuai pada aksi pengendalian tabel 2.1. Pada bak kolam ikan terdapat lima buah sensor yaitu sensor suhu, pH, DO, kekeruhan dan konduktifitas. Pada bagian ini sepenuhnya sepenuhnya dikendalikan oleh terminal unit. Aksi pengendalian akan berubah saat user dari sentral unit mengubah nilai-nilai pada batasan aksi pengendalian masing– masing parameter.
Gambar 2.2. Gambar plan pengendalian air kolam
Keterangan Gambar 2.1: 1. Bak Sumber
2. Boks Elektronik 3. Bak Kolam
Penelitian ini dijelaskan bahwa bak sumber adalah bak yang berisi air sungai. Bak ini difungsikan sebagai tempat air yang berasal dari sungai sebagai sumber utama air yang masuk ke dalam kolam. Air dari bak sumber akan masuk saat pintu inlet terbuka. Boks elektronik merupakan tempat pengendalian dari plant yang ada. Bak kolam merupakan bak sebagai tempat pengujian yang utama atau sebagai habitat dari ikan tersebut. Penampang aerator merupakan tempat aerator atau pemberian oksigen ke bak kolam. Bak pembuangan merupakan bak tempat keluaran dari bak kolam. Air akan keluar saat pintu outlet dalam keadaan terbuka. Bak sumur adalah bak yang berisikan air sumur. Air sumur digunakan untuk penambahan konduktifitas air kolam.
Tabel 2.1. menjelaskan tentang aksi pengendalian atau kondisi yang harus dijalankan saat kolam berada pada standar air yang ada. Kondisi kolam dapat diketahui dari kelima sensor yang ada.
Tabel 2.1. Aksi pengendalian[4]
Kualitas Yang diamati Standar air Aksi Pengendalian
Suhu 18-28 ºC Jika suhu air kolam >28 ºC atau <18 maka: - Inlet off
- Outlet on
- Pompa sumur on
Dengan asumsi suhu air sumur selalu berada pada suhu 18ºC – 28ºC.
pH 5-8,5 Jika pH air kolam >8.5 atau <5 maka: - Inlet off
- Outlet on
- Pompa sumur on
Dengan asumsi PH air sumur selalu berada diantara 5 – 8,5.
Kekeruhan <380 NTU Jika kekeruhan air kolam >380 NTU maka: - Inlet off
- Outlet on
- Pompa sumur on
Dengan asumsi kekeruhan air sumur < 80 NTU Konduktivitas < 4800 μS Jika konduktifitas air kolam > 4800 μS
maka: - Inlet off - Outlet on
- Pompa sumur on
Dengan asumsi konduktifitas air sumur <4800 μS
2.2.1. Data Pengujian Pengendalian Suhu Air
[image:30.595.85.509.168.639.2]Dari hasil penelitian sebelumnya, terdapat dua hasil pengujian saat suhu kolam naik dan suhu kolam turun. Hal ini dilakukan dengan cara pemberian air sumur yang memiliki suhu 27°C[4].
Tabel 2.2. Data pengujian pengendalian suhu naik[4]
Tinggi air (cm) Suhu (°C) Keterangan
12,5 18 Batas bawah ketinggian air
13,5 20
14,5 20
15,5 21
16,5 21
17,5 22
18,5 22
19,5 23 Air keluar melalui outlet
Tabel 2.3. Data pengujian pengendalian suhu turun[4]
Tinggi air (cm) Suhu (°C) Keterangan
12,5 31 Batas bawah
13,5 31
14,5 31
15,5 30
16,5 30
17,5 30
18,5 29
19,5 29 Air keluar melalui outlet
2.2.2. Data Pengujian Pengendalian pH Air
sedangkan untuk mendapatkan pH yang lebih dari 8,7 air kolam dicampur dengan deterjen[4].
Tabel 2.4. Data pengujian pH asam[4]
Tinggi air (cm) pH Keterangan
12,5 4,6 Batas bawah ketinggian air
13,5 4,7
14,5 4,8
15,5 4,8
16,5 4,9
17,5 5,6
18,5 5,7
19,5 5,7 Air keluar melalui Outlet
Tabel 2.5. Data pengujian pH basa[4]
Tinggi air (cm) pH Keterangan
12,5 8,9 Batas bawah ketinggian air
13,5 8,7
14,5 8,6
15,5 8,5
16,5 8,5
17,5 8,4
18,5 8,4
19,5 8,3 Air keluar melalui Inlet
2.2.3. Data Pengujian Pengendalian Kekeruhan Air
Pengujian pengendalian kekeruhan air dilakukan dengan mencampurkan air sumur dengan air kolam. Air kolam yang dibuat keruh (434 NTU) dikendalikan dengan sumur yang memiliki kekeruhan sebesar 104 NTU[4].
Tabel 2.6. Data pengujian kekeruhan air[4] Tinggi air (cm) Kekeruhan
(NTU)
Keterangan
Tabel 2.7. (Lanjutan) Data pengujian kekeruhan air[4] Tinggi air (cm) Kekeruhan
(NTU)
Keterangan
13,5 372
14,5 286
15,5 256
16,5 219
17,5 196
18,5 178
19,5 158 Air keluar melalui Inlet
2.2.4. Data Pengujian Pengendalian Kandungan Oksigen (DO)
Peningkatan DO ditingkatkan dengan menggunakan aerator. Peningkatan DO dikarenakan kontak yang terjadi antara air dan udara, sehingga oksigen dalam air meningkat dari sebelumnya 0.07339% menjadi 0.33763%. Data yang diperoleh belum dapat mengetahui seberapa lama waktu yang dibutuhkan untuk mengendalikan DO, hal ini dikarenakan alat ukur DO yang digunakan pada sistem ini memerlukan waktu yang cukup lama dalam melakukan pengukuran, sehingga data yang diperoleh merupakan data pengendalian setelah 20 menit dikendalikan[4].
Tabel 2.8. Data pengujian kandungan oksigen [4]
Aksi Waktu DO Sebelum Aksi DO Sesudah Aksi
Motor Aerator on 20 menit 0,07339% 0,33736%
2.2.5. Data Pengujian Pengendalian Konduktivitas Air
Pengujian pengendalian konduktivitas air dilakukan dengan mencampurkan air kolam dengan air sumur. Air kolam yang memiliki konduktivitas 5548 uS/cm kendalikan dengan mencampurkan air sumur yang memiliki konduktivitas sebesar 543 uS/cm. Untuk mendapatkan konduktivitas yang lebih dari 5000 uS/cm, air kolam dicampur dengan garam[4].
Tabel 2.9. Data pengujian konduktivitas air[4]
Tinggi air (cm) Konduktivitas (uS/cm) Keterangan
[image:32.595.82.527.82.582.2]Tabel 2.10. (Lanjutan) Data Pengujian Konduktivitas air[4] Tinggi air (cm) Konduktivitas (uS/cm) Keterangan
13,5 4561
14,5 3972
15,5 853574
16,5 2706
17,5 2007
18,5 1660
19,5 1646 Air keluar melalui Outlet
2.3. Regulator Tegangan
Pengatur tegangan (voltage regulator) berfungsi menyediakan suatu tegangan keluaran dc tetap yang tidak dipengaruhi oleh perubahan tegangan masukan, arus beban keluaran, dan suhu. Pengatur tegangan adalah salah satu bagian dari rangkaian catu daya DC. Tegangan masukan berasal dari tegangan keluaran filter, setelah melalui proses penyearahan tegangan AC menjadi DC[7].
Pengatur tegangan dikelompokkan dalam dua kategori, pengatur linier dan switching regulator. Kategori pengatur tegangan linier adalah pengatur tegangan seri
(Series Regulator) dan pengatur tegangan parallel (Shunt Regualtors). Dua jenis pengatur di atas dapat diperoleh untuk keluaran tegangan positif maupun negatif. Switching regulator terdapat tiga jenis konfiguarsi yaitu, step-up, step-down dan inverting[7].
2.3.1. PENGATUR TEGANGAN IC 78XX
IC 78XX adalah regulator tegangan positif dengan tiga terminal, masing-masing inpuit, ground dan output. IC 78XX tersedia untuk beberapa nilai tegangan keluaran seperti terlihat pada tabel 2.9.[7]
Tabel 2.11. Tipe IC 78XX[7] Type VOUT
(Volt)
IOUT (A) VIN (Volt)
78XXC 78LXX 78MXX Min Maks
7805 5 1 0,1 0,5 7,5 20
7806 6 1 0,1 0,5 8,6 21
Tabel 2.12. (Lanjutan) Tipe IC 78XX[7] Type VOUT
(Volt)
IOUT (A) VIN (Volt)
78XXC 78LXX 78MXX Min Maks
7809 9 1 0,1 0,5 11,5 24
7810 10 1 0,1 0,5 12,5 25
7812 12 1 0,1 0,5 14,5 27
7815 15 1 0,1 0,5 17,5 30
7818 18 1 0,1 0,5 21 33
7824 24 1 0,1 0,5 27 38
Meskipun semula dirancang untuk regulator tegangan tetap, namun regulator ini dapat dikembangkan untuk tegangan dan arus yang dapat diatur. Rangkaian dasar 78XX ditunjukkan pada gambar 2.1., untuk tegangan dan arus output sesuai nilai nominalnya.
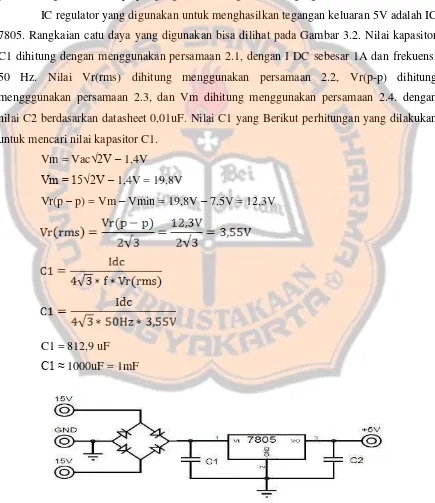
Gambar 2.3. Rangkaian dasar regulator 78XX
C1 diperlukan jika regulator jauh dari Kapasitor filter pencatu daya sedangkan C2 diperlukan untuk memperbaiki tanggapan kilasan dan penindasan kerut (trancient response). Dalam penerapannya, tegangan masukan VIN harus lebih besar dari tegangan
keluaran, jika kurang maka regulator tidak berfungsi tetapi bila melebihi nilai VIN
maksimumnya dapat merusak regulator[7].
Perhitungan nilai kapasitor C1 menggunakan persamaan:[8]
(2.1)
dengan
C : Kapasitor dalam Farad Idc : Arus beban dalam Ampere f : Frekuensi dalam Hz
Di mana nilai Vr(rms) dapat dicari dengan menggunakan persamaan:[8]
(2.2)
dengan Vr(p-p) adalah tegangan ripple peak to peak yang merupakan selisih antara tegangan masukan regulator dengan tegangan masukan minimum IC regulator yang digunakan atau dapat dirumuskan sebagai berikut:[8]
(2.3)
dengan:
Vm : Tegangan masukkan regulator dalam volt Vmin : Tegangan masukkan minimum IC regulator
Apabila tegangan masukan regulator berasal dari tegangan AC yang kemudian disearahkan menggunakan dioda, nilai Vm dicari menggunakan persamaan:[8]
(2.4) Dengan Vac merupakan nilai tegangan AC yang sudah diturunkan menggunakan trafo step-down (volt) dan adanya nilai 1,4V karena menggunakan dioda sebagai penyearah.
2.4. Module PL2303
PL2303 adalah sebuah modul USB to Serial TTL yang berfungsi untuk melakukan komunikasi serial UART ke USB dan sebaliknya. Modul ini berukuran kecil dan sangat mudah digunakan yang dapat dipakai pada 2 level tegangan TTL, yaitu 5V dan 3,3V.
Terdapat 5 buah pin yang terdiri dari GND, TXD, RXD, 3.3V and 5.0V. Pin GND berfungsi sebagai grounding, pin TXD berfungsi sebagai pin keluaran data ke serial port. Pin RXD berfungsi sebagai masukkan data dari serial BUS. Pin 3.3V dan 5.0V berfungsi sebagai sumber tegangan tambahan yang dapat digunakan untuk mencatu komponen yang lain.
2.5. Mikrokontroler AVR
Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai kemampuan untuk mengendalikan masukan dan keluaran alat elektronika digital lainnya dengan menggunakan program. ATMEL dalam pembuatan mikrokontroler mengeluarkan dua jenis yaitu MCS dan AVR. AVR (Alf and Vegard’s Ricsprocessor) merupakan mikrokontroler yang menggunakan teknologi RICS (Reduce Instruction Set Computer). Mikrokontroler AVR sendiri dikelompokan dalam menjadi empat kelas, yaitu keluarga Attiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT86RFxx. Kecepatan frekuensi kerja MCS adalah satu per-dua belas dari frekuensi osilator yang digunakan. Kecepatan frekuensi kerja AVR sama dengan kecepatan kerja osilator yang digunakan, sehingga AVR mempunyai kecepatan kerja dua belas kali lebih cepat dari MCS[9].
2.5.1. Arsitektur Mikrokontroler AVR 8535
Mikrokontroler AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 8535 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal. Register keperluan umum menempati space data pada alamat terbawah, yaitu 00 sampai 1F[9].
Sementara itu, register khusus untuk menangani I/O dan control terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari 20 hingga 5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral microcontroller, seperti control register, timer/conter, fungsi-fungsi I/O, dan sebagainya. 11 Register khusus alamat memori secara lengkap Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F[9].
Mikrokontroler ATMega8535 memiliki bagian sebagai berikut[9]:
c. Tiga buah Timer/Counter dengan kemampuan perbandingan. d. CPU yang terdiri atas 8535 buah register.
e. Watchdog Timer dengan osilator internal. f. SRAM sebesar 512 byte.
g. Memori Flash sebesar 8535 kb dengan kemampuan Read While Write. h. Unit interupsi internal dan eksternal.
i. Port antarmuka SPI.
j. EEPROM sebesar 512 byte yang dapt diprogram saat operasi. k. Antarmuka komparator analog.
l. Port USART untuk komunikasi serial.
Gambar 2.5. Blok diagram fungsional mikrokontroler ATMega8535
Pada gambar 2.6. pin ATMega8535 dapat dijelaskan secara fungsional konfigurasi pin mikrokontroler ATMega8535 sebagai berikut[9]:
c. Port A (PA0..PA7) mereupakan pin I/O dua arah dan pin masukan ADC.
d. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog, dan SPI.
e. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Oscilator.
f. Port D (PD0..PD7) merupakan pin I/O dua rah dan fungsi pin khusus, yaitu komparator analog, interupsi eksternal, dan komunikasi serial.
g. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. h. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
i. AVCC merupakan pin masukan tegangan untuk ADC. j. AREF merupakan pin masukan tegangan refrensi ADC.
Gambar 2.6. Pin ATMega8535
Data yang dipakai dalam mikrokontroler ATMega8535 dipresentasikan dalam sistem bilangan biner, desimal, dan bilangan heksadesimal. Data yang terdapat di mikrokontroler dapat diolah dengan berbagai operasi aritmatik (penjumlahan, pengurangan dan perkalian) maupun operasi nalar (AND, OR, dan EOR /eksklusif OR)[9]. AVR Atmega 8535 memiliki tiga buah timer, yaitu[10]:
a. Timer/counter 0 (8 bit). b. Timer/ counter 1 (16 bit). c. Timer/counter 2 (8 bit).
b. Kapabilitas memori flash 8 kb, SRAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
c. ADC internal dengan fidelitas 10 bit sebanyak 8 channels.
d. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps. e. Enam pilihan mode sleep menghemat penggunaan daya listrik.
2.6. Port Input / Output
Port I/O pada mikrokontroler ATMega8535 dapat difungsikan sebagai input ataupun output dengan keluaran high atau low. Untuk mengatur fungsi port I/O sebagai input ataupun output, perlu dilakukan setting pada DDR dan Port.
Output High saat DDR bit = 1 dan port bit = 1, output Low saat DDR bit = 1 dan port bit = 0. Input pull-up saat DDR bit = 0 dan port bit = 1, input floating saat DDR bit = 0 dan port bit = 0. Pull up artinya saat tidak ada tegangan dari luar pin, akan cenderung berkondisi High. Floating artinya pin bisa berlogika high bisa juga berlogika low.
Berikut tabel pengaturan port I/O:
Tabel 2.10. Konfigurasi setting untuk port I/O[9]
DDR bit = 1 DDR bit = 0 Port bit = 1 Output High Input pull-up
Port bit = 0 Output Low Input Floating
Port I/O sebagai output hanya memberikan arus sourcing sebesar 20mA sehingga untuk menggerakan motor atau kendali alat elektronis yang lain, perlu diberikan penguat tambahan atau dapat juga dengan konfigurasi port sebagai sinking current, seperti pada port yang digunakan untuk menyalakan LED, yang akan menyala saat port diberikan logika low dan mati saat port logika high.
2.7.
Komunikasi
Serial
USART
(Universal
Synchronous
and
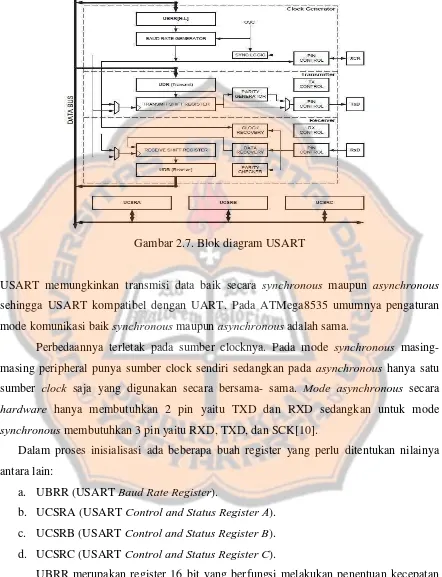
Asynchronous serial Receiver and Transmitter)
Universal Synchronous and Asynchronous Serial Receiver and Transmitter
untuk melakukan transfer data baik antara mikrokontroler maupun dengan modul modul eksternal termasuk PC yang mempunyai fitur UART[10].
Gambar 2.7. Blok diagram USART
USART memungkinkan transmisi data baik secara synchronous maupun asynchronous sehingga USART kompatibel dengan UART. Pada ATMega8535 umumnya pengaturan mode komunikasi baik synchronous maupun asynchronous adalah sama.
Perbedaannya terletak pada sumber clocknya. Pada mode synchronous masing-masing peripheral punya sumber clock sendiri sedangkan pada asynchronous hanya satu sumber clock saja yang digunakan secara bersama- sama. Mode asynchronous secara hardware hanya membutuhkan 2 pin yaitu TXD dan RXD sedangkan untuk mode
synchronous membutuhkan 3 pin yaitu RXD, TXD, dan SCK[10].
Dalam proses inisialisasi ada beberapa buah register yang perlu ditentukan nilainya antara lain:
a. UBRR (USART Baud Rate Register).
b. UCSRA (USART Control and Status Register A). c. UCSRB (USART Control and Status Register B). d. UCSRC (USART Control and Status Register C).
sisanya. UBRRH dan UBRRL dihitung menggunakan rumus di dibawah ini. U2X merupakan bit pada register UCSRA[10].
Gambar 2.8. Rumus perhitungan nilai UBRR[12]
Untuk penyimpanan data baik yang dikirim maupun yang diterima dalam komunikasi USART, register yang digunakan adalah USART Data Register (UDR). Meskipun register UDR hanya menempati satu lokasi memori yaitu 0x0C (0x02C) tetapi sebenarnya register UDR mempunyai 2 register I/O yaitu RXB sebagai buffer untuk menyimpan data yang diterima dan TXB sebagai buffer untuk menyimpan data yang dikirim.
Buffer kirim TXB hanya dapat ditulis atau diisi jika bit UDRE dalam register
UCSRA bernilai “1”. Jika data telah diisikan ke buffer kirim TXB dan transmitter USART
diaktifkan (TXEN pada register UCSRB bernilai “1”) maka data ini akan dimasukkan ke
shift register untuk dikirimkan secara serial melalui pin TXD. Bagan UDR bisa dilihat
pada gambar 2.9.
Gambar 2.9. USART data register [12]
UCSRA merupakan register 8 bit yang berperan dalam pengaturan data yang diterima dan yang dikirim.
UCSRB merupakan register 8 bit pengatur aktivitas penerima dan pengirim USART.
Gambar 2.11. Control and status register B [12]
UCSRB merupakan register 8 bit yang digunakan untuk mengatur mode dan kecepatan komunikasi serial yang dilakukan.
Gambar 2.12. Control and status register C [12]
2.8. Serial Pheripheral Interface (SPI)
Transfer data dengan SPI digunakan antara Master (Microcontroller) dgn slave (microcontroller atau SPI device seperti MMC card, SPI ADC , dll) dalam jarak dekat dan kecepatan cukup tinggi. Komunikasi serial data antara master dan slave pada SPI diatur melalui 4 buah pin yang terdiri dari SCK, MOSI, MISO, dan SS , sebagai berikut [9]:
a. SCK berfungsi sebagai sinyal clock yang menggeser bit yang hendak dituliskan ke dalam register lain.
b. MOSI jalur data dari master dan masuk ke dalam slave.
c. MISO jalur data keluar dari slave dan masuk ke dalam master.
d. SS (slave select) merupakan pin yang berfungsi untuk mengaktifkan slave.
Ada dua macam SPI, yaitu satu master dengan satu slave dan satu master dengan banyak slave.
SPI memiliki tiga buah register yang terdiri dari SPDR(SPI Data Register), SPCR(SPI Control Register), dan SPSR(SPI Status Register).
Gambar 2.14. SPI data register[12]
Gambar 2.15. SPI control register[12]
Gambar 2.16. SPI status register[12]
Penjelasan bit SPI Control Register sebagai berikut[10]:
a. SPIE (SPI Interrupt Enable) : jika bernilai 1 akan membangkitkan interupsi SPI setelah transfer data selesai.
b. SPE (SPI Enable) : untuk mengaktifkan SPI.
c. DORD (Data Order) : jika bernilai 1, maka LSB dikirim terlebih dahulu; jia bernilai 0, maka MSB akan dikirim dahulu.
d. MSTR (Master/Slave Select) : jika bernilai 1, maka AVR sebagai master; jika bernilai 0, maka AVR sebagai slave.
e. CPOL (Clock Polarity) dan CPHA(Clock Phase) : menentukan cara mencuplik data berkaitan dengan pulsa clock.
f. SPR1 dan SPR0 (SPI Clock Rate Select) : menentukan frekuensi dari sinyal clock SCK.
Penjelasan bit SPI Status Register sebagai berikut[10]:
a. SPIF(SPI Interrupt Flag) : akan bernilai 1 jika transfer data telah selesai.
2.9.
RX01-433D
RX01-433D merupakan modul receiver dimana modul tersebut bekerja menggunakan modulasi Frequency Shift Keying (FSK) dengan menggunakan frekuensi kerja 433 Mhz[13]. Untuk konfigurasi pin RX01-433D dapat dilihat pada gambar 2.16 sedangkan blok diagram dapat dilihat pada gambar 2.17. Fungsi setiap pinnya dapat dilihat pada table 2.11.
Gambar 2.17. Konfigurasi Pin RX01-433D
Gambar 2.18. Blok diagram RX01-433D
RX01-433D memiliki spesifikasi, diantaranya sebagai berikut[13]: a. Tidak membutuhkan tuning pada frekuensi.
b. Menggunakan teknologi PLL.
c. Bit rate sampai 115.2 kbps saat mode digital dan 256 kbps saat mode analog. d. Differential antenna.
f. Tegangan Supply 2.2 V sampai 5.4 V.
g. Bandwidth dapat diatur antara 67 KHz sampai 400 KHz. h. Automatic Frequency Control dan Data Quality Detection. i. Menggunakan Antarmuka SPI.
Gambar 2.19. Skematik RX01-433D[13]
Tabel 2.13. Fungsi pin RX01-433D[13]
Pin Nama Tipe Fungsi
1 SDI DI Data input of serial control interface 2 SCK DI Clock input of serial control interface
3 nSEL DI Chip select input of three-wire control interface (active Low) 4 FFIT/SDO DO FIFO IT (active low) or serial data out for Status Read
Command. Tristate with bushold cell if nSEL = H 5 nIRQ DO Interrupt request output, (active low)
6 DATA DO Receiver data output (FIFO not used) nFFS DI FIFO select input
7
DCLK DO Received data clock output (Digital filter used, FIFO not used)
CFIL AIO External data filter capacitor connection (Analog filter used) FFIT DO FIFP IT (active high) FIFO empety function can be achieved
Tabel 2.14. (Lanjutan) Fungsi pin RX01-433D[13]
Pin Nama Tipe Fungsi
9 XTL/REF AIO Crystal connection (other terminal of crystal to VSS)/ External reference input
10 nRES DO Reset output (active low) 11 VSS_D S Digital VSS (connect to VSS) 12 VSS_A S Analog VSS (connect to VSS) 13 VSS_LNA S LNA VSS (connect to VSS) 14 IN2 AI RF differential signal input 15 IN1 AI RF differetial signal input 16 VDD_LNA S Positive supply voltage
17 VDD_A S Analog VDD (connect to VDD) 18 VDD_D S Digital VDD (connect to VDD) 19 ARSSI AO Analog RSSI output
20 VDI DO Valid Data Indicator output
2.10.
TX02-433D
TX02-433D merupakan modul transmitter dimana modul tersebut bekerja menggunakan modulasi Frequency Shift Keying (FSK) dengan menggunakan frekuensi kerja 433 Mhz[14]. Untuk blok diagram TX02-433D dapat dilihat pada gambar 2.10 serta koneksi pin pada TX02-433D dapat dilihat pada gambar 2.10.
Fungsi setiap pinnya dapat dilihat pada table 2.7. TX02-433D memiliki spesifikasi, diantaranya sebagai berikut[14]:
a. Tidak membutuhkan tuning pada frekuensi. b. Menggunakan teknologi PLL.
c. Menggunakan modulasi FSK yang stabil dan akurat. d. Differential antenna.
e. Tuning antena otomatis dilakukan oleh modul. f. Tegangan Supply 2.2 V sampai 5.4 V.
g. Menggunakan Antarmuka SPI.
Gambar 2.21. Blok diagram TX02-433D
Tabel 2.15. Fungsi pin TX02-433D [14]
Pin Nama Tipe Fungsi
1 SDI DI Data input of serial control interface 2 SCK DI Clock input of serial control interface
3 nSEL DI Chip select input of serial control interface (active Low) 4 CLK DO Microcontroller clock (1 MHz-10 MHz)
5 XTL AIO Crystal connection (other terminal of crystal to VSS) 6 VSS_D S Digital VSS (Connect to VSS)
7 VSS_A S Analog VSS (Connect to VSS) 8 VSS_RF S RF VSS (Connect to VSS) 9 MOD DI Connect to logic high
10 RFN AO Power amplifier output (open collector) 11 RFP AO Power amplifier output (open collector)
12 nIRQ DO Interrupt request output for microcontroller (active low) and status read output
13 VDD_RF S RF VDD (Connect to VDD) 14 VDD_A S Analog VDD (Connect to VDD) 15 VDD_D S Digital VDD (Connect to VDD) 16 FSK DI Serial data input for FSK modulation
2.11.
LCD 16x2
LCD (liquid cell display) merupakan salah satu alat komponen elektronika yang berfungsi untuk menampilkan data berupa karakter [15]. LCD yang digunakan adalah tipe M168535 yang ditunjukkan pada Gambar 2.21.
LCD tipe ini memiliki 2 baris dimana masing-masing baris memuat 16 karakter. Selain sangat mudah dioperasikan, kebutuhan daya LCD ini sangat rendah[15]. Konfigurasi pin LCDM168535 dapat dilihat pada Tabel 2.15.
Tabel 2.16. Konfigurasi pin LCD M168535 [16]
No. Nama Fungsi
1 Vss 0V (GND)
2 Vdd 5V
3 VLC LCD Contrast Voltage
4 RS Register Select; H: Data Input; L: Instruction Input
5 RW H: Read; L: Write
6 EN Enable Signal
7 D0 Data Bus
8 D1 Data Bus
9 D2 Data Bus
10 D3 Data Bus
11 D4 Data Bus
12 D5 Data Bus
13 D6 Data Bus
14 D7 Data Bus
15 V+BL Positif backlight voltage (4,1V; 112mA) 16 V–BL Negative backlight voltage (0V; GND)
2.12. Visual Basic 6.0
29
BAB III
RANCANGAN PENELITIAN
Perancangan sistem telemetri kualitas kolam air ikan sebagai sentral unit ini dibagi menjadi dua bagian utama yaitu perancangan hardware yang terdiri dari mikrokontroler serta perangkat pendukung yaitu modul TX02-433D, RX01-433D, USB to TTL dan LCD. Bagian berikutnya yaitu perancangan software yang terdiri dari pemograman utama, serta subrutin – subrutin pada mikrokontroler dan GUI pada Visual Basic.
Gambar 3.1 Konsep perancangan
Konsep perancangan tersebut merupakan hubungan dari komponen yang digunakan dalam penelitian ini, dimana RX01-433D digunakan untuk menerima data dari terminal unit secara wireless yang kemudian akan diolah pada ATMega8535. RX01-433D secara keseluruhan bekerja sebagai receiver atau penerima. Penggunaan RX01-433D dengan menggunakan komunikasi SPI (Serial Pheripheral Interface). Paket data tersebut kemudian diolah pada mikrokontroler ATMega8535 dengan cara bila data tersebut merupakan paket data maka akan dipecah terlebih dahulu sesuai dengan urutan karakter yang dikirimkan sehingga menjadi data-data yang terdiri dari data suhu, DO, pH, kekeruhan air serta konduktivitas air kolam. LCD 16x2 akan menampilkan data-data yang diterima dari terminal unit serta perintah ke terminal unit.
Kegunaan dari modul PL2303 USB to TTL sebagai piranti penghubung antara mikrokontroler ATMega8535 dengan Personal Computer (PC) menggunakan komunikasi USART. Data yang berasal dari mikrokontroler ATMega8535 akan dikirim ke Personal Computer (PC) sesuai dengan data yang telah dipecah pada mikrokontroler ATMega8535
komputer yang dipilih oleh pengguna ke ATMega8535 juga melalui modul PL2303 USB to TTL.
TX02-433D digunakan untuk pengirim data atau instruksi ke terminal unit secara wireless dari ATMega8535. TX02-433D secara keseluruhan bekerja sebagai transmitter
atau pengirim. Penggunaan TX02-433D dengan menggunakan komunikasi SPI (Serial Pheripheral Interface). Personal Computer (PC) memiliki fungsi sebagai piranti untuk
menampilkan data yang berasal dari terminal unit. Data yang masuk berupa suhu, DO, pH, kekeruhan air serta konduktivitas air kolam akan ditampilkan secara terpisah dalam bentuk grafik yang real time. Software yang digunakan pada Personal Computer (PC) adalah pemrograman visual basic. Pada visual basic data yang masuk ke Personal Computer (PC) disimpan dalam bentuk database, selain itu pada Visual Basic akan tertampil pilihan menu yaitu meminta salah satu data pada sensor , mengatur nilai batasan masing-masing sensor ke terminal unit, serta mengatur waktu pada terminal unit untuk mengirimkan paket data.
Secara keseluruhan, cara kerja sistem dibagi menjadi dua, yaitu sistem primer dan sistem sekunder. Sistem primer adalah sistem bekerja dalam keadaan ke-5 data dari parameter dikirimkan secara bersamaan dalam paket data. Sistem sekunder adalah data dikirmkan sesuai dengan parameter yang diinginkan oleh pengguna. Sistem primer bekerja berawal dari terminal unit dengan cara paket data yang masuk dari terminal unit melalui RX01-433D sebanyak dua kali kemudian dibandingkan terlebih dahulu, jika paket data tersebut sama maka paket data tersebut kemudian diolah pada mikrokontroler ATMega8535 berdasarkan jenis data yang dikirimkan. Paket data kemudian akan dipecah menjadi lima buah sesuai dengan parameter yang ada. Lima data tersebut kemudian dikirim ke Personal Computer (PC) melalui PL2303 USB to TTL. Dengan menggunakan visual basic, paket data akan tertampil dalam kolom dan baris data masuk serta dalam bentuk grafik dan keterangan kondisi kolam yang ada.
3.1.
Perancangan Regulator Tegangan
Perancangan regulator tegangan digunakan untuk menyalakan piranti-piranti mikrokontroler ATMega8535, LCD 16x2, RX01-433D, dan TX02-433D. Piranti-piranti tersebut membutuhkan catu daya sebesar 5V. Rangkaian catu daya memperoleh sumber tegangan dari jala-jala listrik PLN. Tegangan AC 220V harus diturunkan terlebih dahulu melalui trafo 1A. Penurunan tegangan menjadi sekitar 15V. Tegangan AC tersebut kemudian disearahkan menggunakan diode bridge, sehingga menghasilkan gelombang penuh. Rangkaian catu daya yang digunakan menghasilkan tegangan catu sebesar 5V.
IC regulator yang digunakan untuk menghasilkan tegangan keluaran 5V adalah IC 7805. Rangkaian catu daya yang digunakan bisa dilihat pada Gambar 3.2. Nilai kapasitor C1 dihitung dengan menggunakan persamaan 2.1, dengan I DC sebesar 1A dan frekuensi 50 Hz. Nilai Vr(rms) dihitung menggunakan persamaan 2.2, Vr(p-p) dihitung mengggunakan persamaan 2.3, dan Vm dihitung menggunakan persamaan 2.4. dengan nilai C2 berdasarkan datasheet 0,01uF. Nilai C1 yang Berikut perhitungan yang dilakukan untuk mencari nilai kapasitor C1.
Vm = Vac√2V – 1,4V
Vm = 15√2V – 1,4V = 19,8V
Vr(p – p) = Vm – Vmin = 19,8V – 7,5V = 12,3V
C1 = 812,9 uF
[image:52.595.87.522.238.741.2]C1 ≈ 1000uF = 1mF
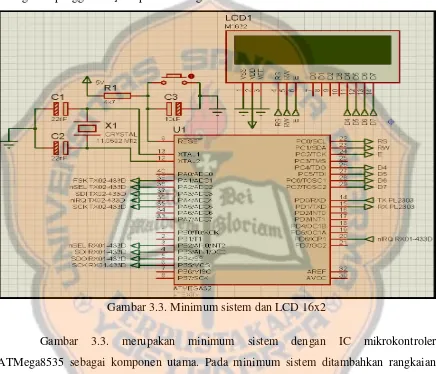
3.2. Perancangan Minimum Sistem dan Display LCD 16x2
[image:53.595.88.526.215.589.2]Minimum sistem merupakan pusat kontrol dan pengolahan data dari maupun ke terminal unit serta dari maupun ke Personal Computer (PC). Display LCD 16x2 merupakan perangkat interface untuk menampilkan paket data yang diterima serta instruksi ke terminal unit. Seluruh bagian kontrol mekanik sistem akan diatur dengan minimum sistem. Gambar 3.3. merupakan gambar rangkaian minsis dengan LCD 16x2 serta konfigurasi penggunaan port pada ATMega8535.
Gambar 3.3. Minimum sistem dan LCD 16x2
Gambar 3.3. merupakan minimum sistem dengan IC mikrokontroler ATMega8535 sebagai komponen utama. Pada minimum sistem ditambahkan rangkaian clock ekstrnal. Nilai kapasitor C1 dan C2 sesuai dengan datasheet ATMega8535, yang berfungsi mengopimalkan clock yang dihasilkan dari crystal 11,0592 MHz. Nilai kapasitor C3 dan resistor R1 sesuai dengan datasheet. Kapasitor C3, resistor R1 serta push button merupakan bagian dari rangkaian reset. LCD akan menampilkan data dari salah satu sensor yang dikirim oleh terminal unit maupun paket data dan karakter yang sedang dijalankan. nIRQ dan nSEL pada TX02-433D maupun RX01-433D akan aktif saat 0 atau Low. Adapun konfigurasi penggunaan port dapat dilihat pada tabel 3.1.
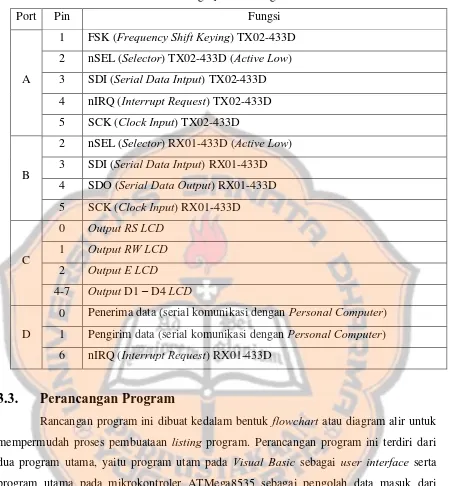
Tabel 3.1. Fungsi port ATMega8535
Port Pin Fungsi
A
1 FSK (Frequency Shift Keying) TX02-433D 2 nSEL (Selector) TX02-433D (Active Low) 3 SDI (Serial Data Intput) TX02-433D 4 nIRQ (Interrupt Request) TX02-433D 5 SCK (Clock Input) TX02-433D
B
2 nSEL (Selector) RX01-433D (Active Low) 3 SDI (Serial Data Intput) RX01-433D 4 SDO (Serial Data Output) RX01-433D 5 SCK (Clock Input) RX01-433D
C
0 Output RS LCD 1 Output RW LCD 2 Output E LCD
4-7 Output D1 – D4 LCD
D
0 Penerima data (serial komunikasi dengan Personal Computer) 1 Pengirim data (serial komunikasi dengan Personal Computer) 6 nIRQ (Interrupt Request) RX01-433D
3.3. Perancangan Program
Rancangan program ini dibuat kedalam bentuk flowchart atau diagram alir untuk mempermudah proses pembuataan listing program. Perancangan program ini terdiri dari dua program utama, yaitu program utam pada Visual Basic sebagai user interface serta program utama pada mikrokontroler ATMega8535 sebagai pengolah data masuk dari terminal unit serta data menuju ke Visual Basic. Program mikrokontroler yang akan dibuat menggunakan bahasa C, kemudian program tersebut disusun (compile) secara otomatis ke dalam bentuk file *.hex untuk dimasukan ke dalam IC mikrokontroler. Listing program yang akan dibuat meliputi:
a. Penerimaan paket data dari terminal unit yang ditampilkan pada Visual Basic. b. Setting waktu pengiriman paket data dari terminal unit.
c. Setting perubahan batasan sensor.
Rancangan flowchart pada gambar 3.4. dapat dilihat berdasarkan GUI (Graphical User Interface) yang telah dirancang. Menu akan dijalankan saat user menge-click tombol “GO”.
[image:55.595.84.507.142.566.2]
Gambar 3.4. Rancangan GUI (Graphical User Interface)
Berdasarkan gambar tersebut, terdapat beberapa default yang menjadi batasan utama dalam program ini. Pengiriman paket data dilaksanakan setiap 60 menit sekali. Batasan suhu yang dapat dirubah adalah 18ºC - 28ºC sesuai teori. Batasan pH yang dapat diubah adalah 5 – 8. Batasan DO yang dapat diubah adalah > 5 ppm. Batasan Kekeruhan yang dapat diubah adalah kurang dari 380 NTU dan batasan konduktivitas yang dapat dirubah adalah kurang dari 4800 μS/cm. Pada grafik data untuk masing-masing grafik data yang dapat ditampilkan adalah 30 paket data terkahir dari database.
yang baru. Garis refrensi pada masing-masing grafik disesuaikan dengan default atau sesuai dengan perubahan yang telah ditetapkan oleh user.
Gambar 3.5. Rancangan grafik data suhu
Gambar 3.6. Rancangan grafik data pH
Gambar 3.8. Rancangan grafik data kekeruhan
Gambar 3.9. Rancangan grafik data konduktifitas
Pada sumbu y adalah 15 data terakhir yang berasal dari database, sehingga ketika terdapat paket data yang baru masuk data pertama hilang data ke-2 hingga ke-15 bergeser ke kiri dan data terkhir adalah data ke-16 dan seterusnya.
Pada perancangan database setiap paket data yang diterima akan disimpan pada database. Paket data yang diterima mempunyai sembilan buah data yang terdiri dari data
disimpan sejumlah 144 paket data. Berdasarkan hal tersebut dengan mengasumsikan satu bulan adalah 31 hari, maka:
Satu hari = 24 jam = 1.440 menit. Satu paket data = 10 menit.
Satu hari = 1.440 / 10 = 144 paket data. Satu bulan = 31 hari.
Satu bulan = 144 x 31 = 4.464 paket data. Tiga bulan = 4.464 x 3 = 13.392 paket data.
[image:58.595.78.535.255.736.2]Pada perhitungan tersebut, dengan perhitungan minimum maka jika dalam satu excel dapat menampung paket data selama tiga bulan membutuhkan 13.392 paket data. Berdasarkan jumlah maksimum dalam satu excel maka dengan menggunakan excel sebagai penyimpanan paket data dapat mencukupi penyimpanan paket data selama tiga bulan.
Tabel 3.2. Rancangan format database
Gambar 3.11. (Lanjutan) Diagram alir utama GUI
Pada diagram alir utama pada Visual Basic tersebut, huruf “Y” berarti Yes dan
memilih pilihan Database, maka database pada microsoft excel akan tertampil pada layar kemudian bila user memilih reset, maka batasan kondisi air normal masing-masing sensor akan kembali ke normal. Saat user memilih tanggal untuk melihat grafik yang user inginkan, maka pada datagrid akan tertampil data sesuai dengan tanggal yang diingikan. Bila user memilih keluar, maka program visual basic akan tertutup. Pada diagram alir ini VB berarti visual basic.
3.3.1. Subrutin Setting Waktu Pengiriman VB
[image:60.595.85.509.252.650.2]Subrutin ini dilaksanakan saat user memilih menu untuk mengatur lama waktu terminal unit mengirimkan paket data ke sentral unit.
Gambar 3.12. Diagram alir subrutin setting waktu pengiriman VB
merupakan data satuan menit. Nilai ff bila kurang dari 10 maka tertampil msgbox “Batasan
minimal 10 menit” dan jika ff leb
![Tabel 2.2. Data pengujian pengendalian suhu naik[4]](https://thumb-ap.123doks.com/thumbv2/123dok/805013.603515/30.595.85.509.168.639/tabel-data-pengujian-pengendalian-suhu-naik.webp)
![Tabel 2.4. Data pengujian pH asam[4]](https://thumb-ap.123doks.com/thumbv2/123dok/805013.603515/31.595.86.508.125.598/tabel-data-pengujian-ph-asam.webp)
![Tabel 2.7. (Lanjutan) Data pengujian kekeruhan air[4]](https://thumb-ap.123doks.com/thumbv2/123dok/805013.603515/32.595.82.527.82.582/tabel-lanjutan-data-pengujian-kekeruhan-air.webp)
![Tabel 2.10. (Lanjutan) Data Pengujian Konduktivitas air[4]](https://thumb-ap.123doks.com/thumbv2/123dok/805013.603515/33.595.80.534.88.753/tabel-lanjutan-data-pengujian-konduktivitas-air.webp)
![Tabel 2.12. (Lanjutan) Tipe IC 78XX[7]](https://thumb-ap.123doks.com/thumbv2/123dok/805013.603515/34.595.80.533.124.767/tabel-lanjutan-tipe-ic-xx.webp)