Model Matematika dan Solusi dari Sistem Getaran Dua Derajat Kebebasan (Getaran Tergandeng).
Teks penuh
Gambar



Dokumen terkait
Sistem Akuisisi Data yang dibuat menggunakan sensor potensiometer, penguatan sinyal dilakukan oleh penguat non inverting, pengubahan data analog ke digital (ADC) dan pengiriman
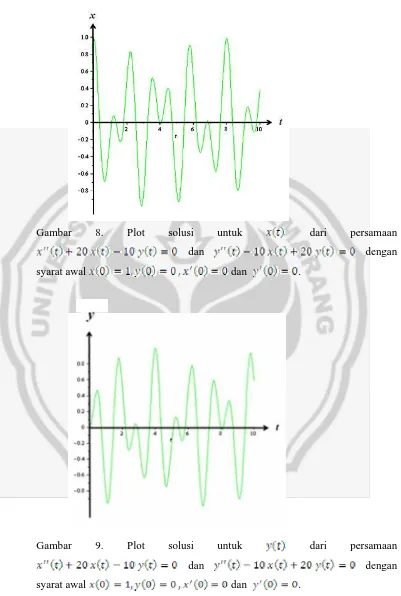
Transform Laplace dapat diterapkan untuk menyelesaikan masalah nilai awal persamaan diferensial linear orde dua dengan koefisien konstan khususnya pada getaran pegas
Pada tugas akhir ini telah dibangun suatu robot planar direct drive dua derajat kebebasan dengan semaksimal mungkin mendekati model ideal dari suatu robot eksperimen. Robot
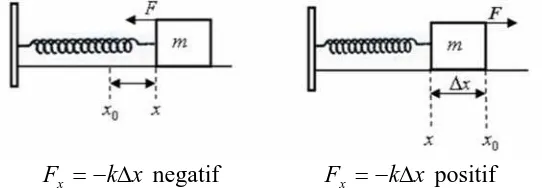
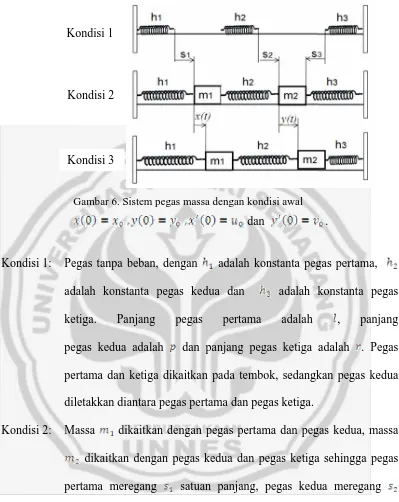
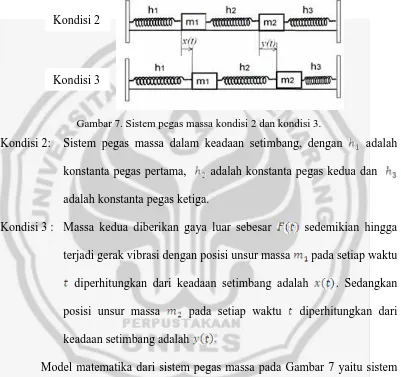
Persamaan gerak untuk sistem dengan satu derajat kebebasan dapat diperoleh dengan prinsip keseimbangan dari gaya-gaya yang bekerja pada sistem tersebut, yaitu gaya luar dan
Tahap pertama adalah mempelajari metode untuk mencari eksistensi solusi gelombang jalan model model sistem nonlinier dan membuktikan kestabilan solusi gelombang jalan yang
Untuk pengendali 2 derajat kebebasan tipe paralel, jenis – jenis pengendali yang dirancang meliputi pengendali Proporsional Derivative (PD), pengendali
Dengan menggunakan kontrol PID bertingkat, robot keseimbangan beroda dua telah mampu menyeimbangkan diri dengan osilasi berkisar ± 15,00 derajat dan dapat bergerak menuju
Pada penelitian ini, sistem kendali self tuning dua derajat kebebasan PI-P dengan menggunakan metode fuzzy logic digunakan untuk mengendalikan kecepatan motor sinkron magnet permanen
