BAB 2
TEORI DASAR
2.1 Umum
Analisis respon struktur terhadap beban gempa memerlukan pemodelan. Pemodelan struktur dilakukan menurut derajat kebebasan pada struktur. Pada tugas ini ada dua jenis pemodelan struktur berdasarkan jumlah derajat kebebasannya, yakni struktur dengan satu derajat kebebasan (single degree of freedom) dan struktur dengan banyak derajat kebebasan (multi degree of freedom). Untuk multi degree of freedom dibatasi sampai tiga lantai saja. Teori mengenai struktur dengan satu derajat kebebasan maupun dengan banyak derajat kebebasan disajikan dalam bab ini.
2.2 Sistem Dinamik dengan Satu Derajat Kebebasan
Sistem dengan satu derajat kebebasan dibedakan menjadi struktur tanpa redaman dan struktur dengan redaman.
2.2.1 Sistem Dinamik Satu Derajat Kebebasan tanpa Redaman
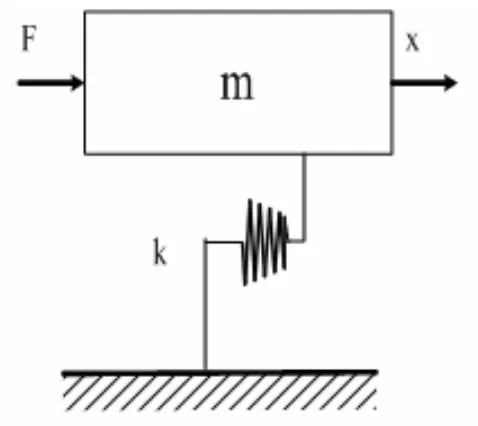
Untuk bangunan dengan satu lantai dapat dimodelkan dengan sistem dinamik satu derajat kebebasan. Persamaan gerak untuk sistem dengan satu derajat kebebasan dapat diperoleh dengan prinsip keseimbangan dari gaya-gaya yang bekerja pada sistem tersebut, yaitu gaya luar dan gaya-gaya lainnya yang terjadi akibat adanya gerakan-gerakan pada sistem tersebut, seperti gaya inersia, gaya redaman, dan gaya elastik pegas.
Persamaan gerak untuk sistem satu derajat kebebasan di atas adalah:
FI + FS= F(t) (2-1)
Di mana FI adalah gaya inersia oleh massa m, FS adalah gaya pegas, dan F(t) adalah gaya
dinamik luar yang bekerja pada sistem. Gaya inersia dan gaya pegas tersebut dapat ditulis sebagai berikut: ( ) ( ) I S F mx t F kx t = = (2-2)
Apabila persamaan (2-2) disubstitusikan ke dalam persamaan (2-1) maka persamaan gerak sistem berderajat kebebasan satu tanpa redaman adalah:
( ) ( ) ( )
mx t +kx t =F t (2-3)
Di mana
x(t) = percepatan fungsi dari waktu x(t) = perpindahan fungsi dari waktu
F(t) = beban luar dinamik fungsi dari waktu.
Dengan m dan k berturut-turut adalah massa dan kekakuan sistem.
Seperti yang kita lihat pada gambar 2.1 di atas, pemodelan struktur SDOF tanpa redaman cukup sederhana, namun perlu diketahui bahwa untuk memodelkan struktur seperti di atas massa m merupakan massa struktur terkumpul termasuk setengah dari massa kolom ditambah dengan massa pelat lantai, massa dari balok, dan massa (beban) lain yang bekerja pada SDOF tersebut.
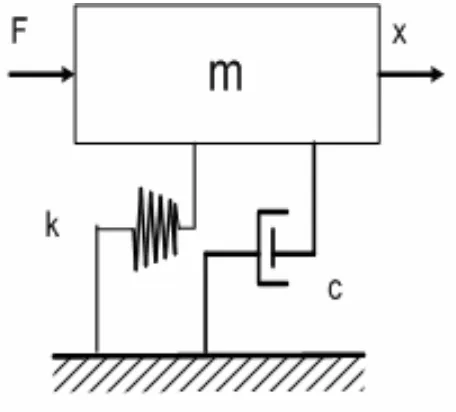
2.2.2 Sistem Dinamik Satu Derajat Kebebasan dengan Redaman
Untuk sistem satu derajat kebebasan dengan redaman persamaan geraknya dapat ditulis sebagai berikut: FI + FD + FS = F(t) ( ) ( ) ( ) mx t +cx+kx t =F t (2-4) Di mana
x(t) = percepatan fungsi dari waktu x(t) = kecepatan fungsi dari waktu x(t) = perpindahan fungsi dari waktu
F(t) = beban luar dinamik fungsi dari waktu.
2.3 Sistem Dinamik dengan Banyak Derajat Kebebasan.
Sebenarnya setiap struktur mempunyai derajat kebebasan yang tak terhingga jumlahnya, dan suatu struktur mempunyai frekuensi alami sebanyak derajat kebebasan yang dimilikinya. Akan tetapi untuk menyederhanakan analisis dan perhitungan, maka struktur tersebut dianggap memiliki derajat kebebasan terbatas. Dalam studi ini sistem bangunan dimodelkan sebagai sistem lump mass yang hanya memiliki derajat kebebasan searah dengan gaya luar yang bekerja pada sistem tersebut. Model lump mass tersebut akan identik dengan jumlah lantai bangunan, di mana massa lantai dan beban lainnya baik beban mati maupun hidup akan disatukan dalam satu massa. Struktur bangunan dengan tiga lantai akan dimodelkan dengan sistem dengan tiga derajat kebebasan.
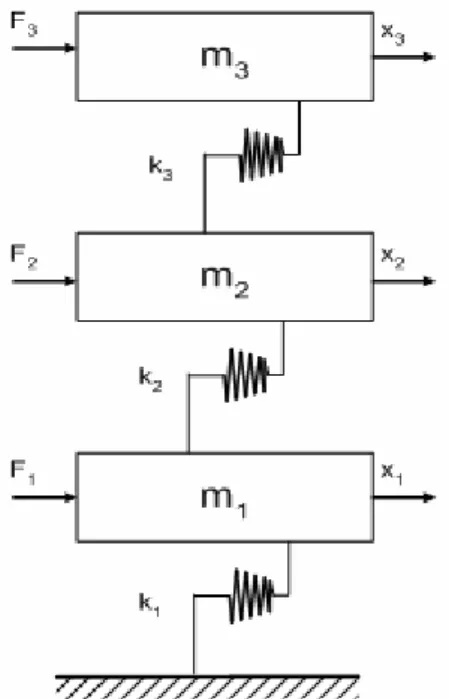
2.3.1 Getaran Bebas pada Sistem Banyak Derajat Kebebasan tanpa Redaman
Gambar 2.3 Sistem dinamik banyak derajat kebebasan tanpa redaman
Persamaan gerak sistem dengan banyak derajat kebebasan tergantung pada letak setiap komponennya. Untuk sistem dinamik seperti pada gambar 2.3 di atas persamaan geraknya dapat ditulis sebagai berikut:
(
)
(
)
1 1 1 2 1 2 2 1 2 2 2 3 2 2 1 3 3 3 3 3 3 3 2 3 m x k k x k x F m x k k x k x k x F m x k x k x F + + − = + + − − = + − = 2 1 2 3 (2-5)Persamaan 2-5 dapat ditulis dalam bentuk matrik sebagai berikut.
1 1 1 1 2 2 2 2 2 2 3 3 2 3 3 3 3 3 0 0 0 0 0 0 0 0 x x F m k k k m x k k k k x m k k F x x F + − ⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎛ ⎞ ⎛ ⎞ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎜ ⎟ + −⎜ + − ⎟ = ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎜ ⎟ ⎜ ⎟ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎜ ⎟ ⎜ − ⎟ ⎝ ⎠⎩ ⎭ ⎝ ⎠⎩ ⎭ ⎩ ⎭ (2-6)
Persamaan di atas dapat disederhanakan sebagai berikut.
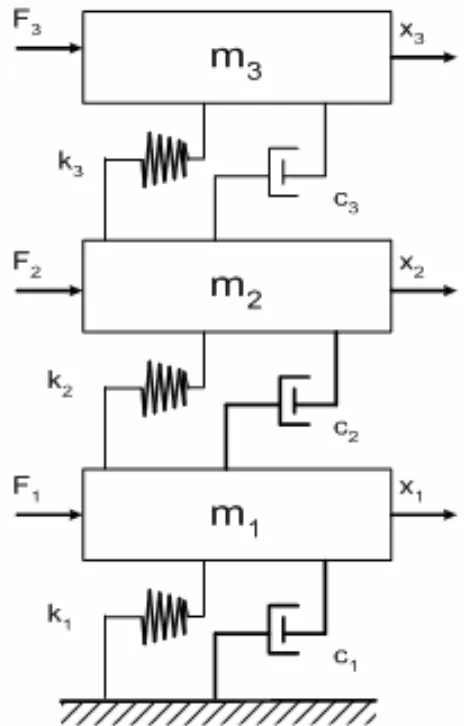
2.3.2 Getaran Bebas pada Sistem Banyak Derajat Kebebasan dengan Redaman
Persaamaan gerak untuk sistem dengan banyak derajat kebebasan, MDOF (Multiple Degree of Freedom), diperoleh dari prinsip keseimbangan gaya-gaya yang bekerja pada sistem tersebut, yaitu gaya luar, gaya inersia, gaya elastik pegas, dan gaya redaman.
Gambar 2.4 Sistem dinamik banyak derajat kebebasan dengan redaman
Misalnya untuk persamaan gerak sistem MDOF dengan redaman seperti pada gambar 2.4 di atas persamaan geraknya dapat ditulis sebagai berikut:
(
)
(
)
(
)
(
)
1 1 1 2 1 2 2 1 2 1 2 2 1 2 2 2 3 2 2 1 3 2 3 2 2 1 3 3 3 3 3 3 3 2 3 3 3 2 3 m x c c x c x k k x k x F m x c c x c x c x k k x k x k x F m x c x c x k x k x F + + − + − = 2 + + − − + + − − = + − + − = (2-8)Persaman 2-8 dapat ditulis dalam bentuk matrik sebagai berikut.
1 1 1 1 2 2 1 2 2 2 2 2 2 3 3 2 2 2 3 3 2 3 3 3 3 3 3 3 0 0 0 0 0 0 0 0 0 0 1 1 2 3 3 x x x m c c c k k k m x c c c c x k k k k x m c c k k F F x x x + − + − ⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎜ ⎟ + −⎜ + − ⎟ + −⎜ + − ⎟ = ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎜ ⎟ ⎜ − ⎟ ⎜ − ⎟ ⎝ ⎠⎩ ⎭ ⎝ ⎠⎩ ⎭ ⎝ ⎠⎩ ⎭ ⎩ ⎭ F (2-9)
Persamaan 2-9 dapat disederhanakan sebagai berikut.
2.4 Redaman pada Struktur
Pada sub bab sebelumnya telah dibahas persamaan gerak sistem dinamik dengan redaman. Untuk system dinamik bebas dengan redaman persamaan gerak sistem dapat ditulis kembali sebagai berikut.
0
mx cx kx+ + = (2-11) Jawaban dari persamaan (2-11) di atas adalah:
( )
( )
( )
2 st st st x t Ce x t sCe x t s Ce = = = (2-12)Dengan s = bilangan laplace = ± Ωj j = bilangan imajiner
Jika persamaan (2-12) disubstitusikan kedalam persamaan (2-11) maka didapat.
(
2)
st 0ms + +cs k Ce = (2-13)
Karena nilai C tidak sama dengan nol, maka persamaan (2-13) akan mempunyai jawab bila:
2 0
ms + + =cs k (2-14)
Dari persamaan kuadrat (2-14) dapat dihitung harga s1 dan s2 sebagai berikut. 2 1 2 2 2 2 1 2 4 , 2 2 4 , 2 2 c c m s s m m m c c s s m m − ⎛ ⎞ = ± ⎜ ⎟ − ⎝ ⎠ − ⎛ ⎞ = ± ⎜ ⎟ − Ω ⎝ ⎠ k (2-15) 2.4.1 Redaman Kritis
Nilai redaman kritis dapat didefinisikan sebagai redaman yang didapat jika harga di dalam akar pada persamaan (2-15) sama dengan nol, sehingga persamaan (2-15) hanya mempunyai satu harga s.
2 2 0 2 c m ⎛ ⎞ −Ω = ⎜ ⎟ ⎝ ⎠ (2-16)
Dari persamaan G didapat redaman c=ccradalah 2
cr
2.4.2 Sistem Underdamped
Pada umumnya struktur memiliki redaman walaupun tidak terlalu besar. Dalam hal praktis nilai redaman suatu sistem sering dibandingkan dengan nilai redaman kritisnya yaitu
2 cr
c = mω. Perbandingan nilai redaman didefinisikan sebagai:
2 cr c c c m ξ = = Ω (2-18)
Jika digunakan dalam bentuk persen, maka nilai redaman ξ dari persamaan (2-18) di atas harus dikalikan dengan seratus. Besaran tanpa dimensi ini sering disebut faktor redaman viskus (viscous damping factor).
Substitusi persamaan (2-18) ke dalam persamaan (2-15) maka didapat:
( )
( )
2 2 1 2 2 2 1 2 1 2 , , , D s s s s s s i ξ ξ ξ ξ ξ = − Ω ± Ω − Ω = − Ω ± Ω − Ω = − Ω ± Ω (2-19) 2 1 D ξ Ω = Ω − (2-20) DΩ disebut juga sebagai frekuensi teredam, dan k m
Ω = merupakan frekuensi alami dari
sistem.
2.4.3 Sistem Redaman Berlebih (overdamped system)
Suatu system dinamis disebut mempunyai redaman berlebih jika koefisien redamannya melebihi koefisien redaman kritis. Hal ini sangat jarang ditemui dalam kondisi normal. Dalam hal ξ >1 harga di bawah akar pada persamaan (2-15) mempunyai nilai positif, sehingga persamaan (2-20)dapat ditulis dalam bentuk:
( )
2 2 1 2 1 2 2 , ˆ , ˆ 1 s s s s atau ξω ξω ω ξω ω ω ω ξ = − ± − = − ± = − (2-21)2.5 Prinsip Bandul Sederhana
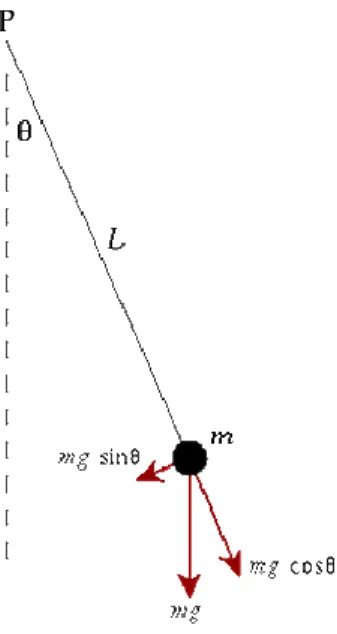
Bandul (pendulum) merupakan sebuah benda yang digantungkan pada ujung sebuah lengan, sehingga dapat berayun sesuai dengan frekuensinya. Pada tugas ini bandul yang
digunakan adalah bandul gravitasi sederhana, yang memiliki satu buah massa, dan satu lengan.
Bandul akan berayun dengan periode tertentu yang ditentukan sebagai berikut:
l T g g l ω = = (2-22)
Di mana l adalah panjang lengan bandul, g adalah percepatan gravitasi, dan ω dalam Hertz (Hz).
Gambar 2.5 Bandul sederhana
Penggunaan persamaan (2-22) di atas akan dimodifikasi sesuai dengan studi kasus yang akan diambil. Lengan bandul bisa terbuat dari baja atau bahan lainnya, dan perletakan ujung dijepit, sehingga bandul akan memiliki kekakuan. Untuk lebih jelas tentang penggunaan rumus di atas akan di bahas pada bab studi kasus.
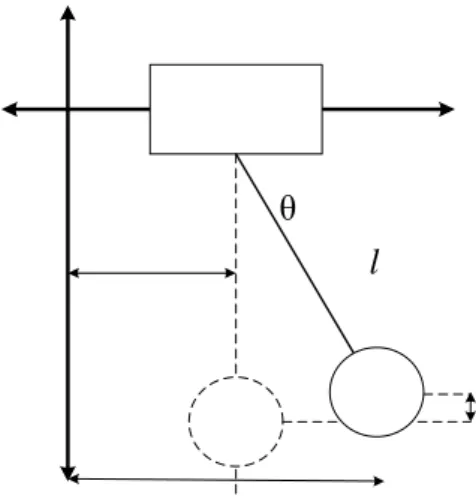
2.6 Bandul pada Support yang Bergerak
θ
l
Gambar 2.6 Bandul pada support yang bergerak
Misalkan sebuah bandul digantung pada sebuah benda dengan massa M yang bergerak hanya pada arah x (horizontal). Bandul digantung dengan sebuah pegas dengan panjang l. bandul menerima gaya dari massa M sehingga bandul berosilasi dan membentuk simpangan terhadap sumbu vertikal yang dinyatakan dengan θ.
Posisi dari bandul terhadap titik awal dari sistem adalah sebagai berikut. sin cos pendulum pendulum x x l y l θ θ = + = (2-23)
Apabila persamaan di atas diturunkan, maka akan didapat persamaan kecepatan sebagai berikut. cos sin pendulum pendulum x x l y l θ θ θ θ = + = − (2-24)
Maka energi kinetik dari bandul dapat ditulis sebagai berikut:
(
) (
(
2)
1 cos sin 2 pend K = m x l+ θ θ + lθ θ)
2 (2-25)Sedangkan energi potensial dari bandul adalah sebagai berikut. cos
V = −mgl θ (2-26)
Persamaan Lagrange adalah sebagai berikut.
0 L T V d L L dt θ θ = − ∂ −∂ = ∂ ∂ (2-27)
Maka untuk persamaan energi bandul di atas dapat ditulis menjadi
(
) (
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)(
)
2 2 2 2 2 2 2 2 2 1cos sin cos
2
1 1
cos sin cos
2 2
cos cos sin sin
cos cos cos
cos cos cos sin L m x l l mgl L m x l m l mgl L m x l l m l l L m xl l l L m xl l ml x l L m x l l m l θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ = + + + = + + + ∂ = + + ∂ ∂ = + + ∂ ∂ = + = + ∂ ∂ = + − + ∂
(
)(
)
(
)
(
)
(
)
2 2 2 2sin cos sin
sin cos sin cos sin sin
sin sin sin l mgl L m x l l l mgl L mxl mgl L ml x g θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ − ∂ = − − + − ∂ ∂ = − − ∂ ∂ = − + ∂ (2-28)
(
cos)
sin(
0 d L L d ml x l ml x g dt θ θ dt θ θ θ θ ∂ −∂ = ⎡ + ⎤+ +)
⎣ ⎦ ∂ ∂ = (2-29)Maka persamaan gerak bandul dapat ditulis sebagai berikut.
2 cos sin 0 cos sin 0 mlx ml mgl atau mx ml mg θ θ θ θ θ θ + + = + + = (2-30)
Untuk θ yang sangat kecil maka sinθ θ≈ dan cosθ≈1
Persamaan gerak bandul untuk model di atas dapat disederhanakan menjadi:
(
0m x l+ θ+gθ
)
= (2-31) Seperti yang telah diuraikan pada sub bab sebelumnya bahwa redaman struktur terdiri dari underdamped, critical damped, dan overdamped, di mana struktur pada umumnya adalah memiliki redaman dengan underdamped, dan pada tugas ini struktur akan dimodelkan dengan underdamped system, maka frekuensi dari struktur adalah sebagai Ω = Ω −D 1 ξ2. Ketika struktur mendapat respon akibat gempa, maka struktur akan bergetar dengan frekuensi teredam ωD. Bandul yang digantung pada sistem akan berosilasi dengan frekuensi yang sama dengan frekuensi sistem di mana bandul digantung. Karena banduljuga memiliki frekuensi alami, maka ada tiga kemungkinan bandul akan bergetar, yakni sebagai berikut:
1. Frekuensi alami bandul jauh lebih tinggi dari frekuensi struktur 2. Frekuensi bandul jauh lebih rendah dari frekuensi struktur 3. Frekuensi bandul sama atau mendekati frekuensi stuktur
Untuk kondisi pertama bandul akan mengikuti support di mana bandul digantung, dan simpangan θ akan sangat kecil, sehingga bandul hampir vertikal. Namun walaupun demikian bandul akan tetap berosilasi dan membentuk keseimbangan dengan frekuensi sama dengan frekuensi support. Untuk kondisi kedua transfer getaran hampir nol, sehingga massa bandul akan hampir tidak bergerak walaupun support bergetar di atasnya. Untuk kondisi ketiga di mana frekuensi alami bandul mendekati frekuensi dari support, maka kondisi ini disebut dengan resonansi. Bandul akan bergetar dengan simpangan maksimum.
2.7 Penyelesaian Persamaan Gerak Sistem Dinamis dengan Metoda Runge Kutta Untuk menganalisis beban acak seperti gempa, ada banyak cara yang dapat digunakan, salah satunya adalah dengan metoda integrasi numerik Runge-Kutta. Integrasi numerik dengan menggunakan metoda Runge-Kutta ini banyak digunakan karena ketepatan dan kemudahannya. Metoda ini digunakan untuk menyelesaikan persamaan diferensial tingkat satu. Untuk menyelesaikan persamaan diferensial yang merupakan persamaan diferensial tingkat dua, persamaan tersebut harus dibuat menjadi persamaan diferensial tingkat satu. Persamaan diferensial tingkat dua dari suatu system dinamik dengan satu derajat kebebasan dapat ditulis sebagai:
[
]
1 ( ) ( , , ) x f t cx kx g x x t m = − − = (2-32)Dengan membuat x= y, maka persamaan di atas dapat ditulis menjadi dua persamaan diferensial tingkat satu:
( , , ) x y y f x y t = = (2-33)
Kedua suku x dan y di sekitar xi dan yi dapat dinyatakan dalam deret Taylor. Dengan
2 2 2 2 2 2 ... 2 ... 2 i i i i i i dx d x h x x h dt dt dy d y h y y h dt dt ⎛ ⎞ ⎛ ⎞ = +⎜ ⎟ + ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ ⎛ ⎞ ⎛ ⎞ + = +⎜ ⎟ + ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ + (2-34)
Dengan menggunakan deret dari persamaan (2-34) dapat diambil turunan pertama sebagai rata-rata kemiringan, sehingga turunan yang lebih tinggi dapat dihilangkan.
av i i av i i dx x x h dt dy y y h dt ⎛ ⎞ = + ⎜ ⎟⎝ ⎠ ⎛ ⎞ = + ⎜ ⎟⎝ ⎠ (2-35)
Dengan menggunakan metoda Simpson, rata-rata kemiringan dalam interval waktu h menjadi: 2 1 4 6 i i av h i t t dy dy dy dy dt dt dt + dt + i t h ⎡ ⎤ ⎛ ⎞ = ⎢⎛ ⎞ + ⎛ ⎞ +⎛ ⎞ ⎥ ⎜ ⎟ ⎢⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎥ ⎝ ⎠ ⎣⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎦ (2-36)
Metoda Runge-Kutta menggunakan persamaan (2-36) dan mengubah bagian tengah dari persamaan tersebut menjadi dua bagian, sehingga mempunyai empat parameter. Keempat parameter dapat dihitung dengan menggunakan persamaan berikut:
1 1 1 1 1 1 2 2 1 2 1 2 2 3 3 2 3 2 3 3 ( , , ) ( , , ) 2 2 2 ( , 2 2 2 i i i i i i i i i T t X x Y y F g T X Y h h h T t X x Y Y y F F g T X Y h h h T t X x Y Y y F F g T X = = = = = + = + = + = = + = + = + = 3 4 4 3 4 3 4 4 , ) ( , , ) i i i Y T = +t h X = +x Y h Y = +y F h F =g T X Y 1 2 2 3 4 4 (2-37)
Dari persamaan (2-37) terlihat bahwa empat nilai dibagi enam merupakan rata-rata
kemiringan
i Y dx
dt dan empat nilai dibagi enam merupakan rata-rata kemiringan Fi dy dt . Dengan kondisi awal:
0 0 0 0 ( ) ( ) x t x 0 x t x y = = = (2-38)
Substitusi kondisi awal pada persamaan (2-38), respon struktur sebagai fungsi waktu untuk setiap interval waktu h atau ∆t dapat dihitung dengan menggunakan persamaan:
[
]
1 2 3 4 1 2 3 4 1 ( ) ( ) ( 2 2 ) 6 1 ( ) ( ) ( 2 2 6 1 ( ) ( ) ( ) ( ) n n n n n n n n ) x t h x t h Y Y Y Y x t h x t h F F F F x t f t cx t kx t m + = + + + + + = + + + + = − − (2-39) Dengan ( )n ( )n h t x t y t = ∆ = (2-40) 2.8 Beban GempaSeperti yang kita ketahui beban gempa sangatlah berpotensi meruntuhkan bangunan, karena beban gempa memiliki energi yang sangat besar. Dalam tugas ini teori mengenai gempa tidak dibahas secara mendalam, namun ada beberapa hal penting tentang gempa yang perlu diketahui untuk dicantumkan dalam tugas ini. Ada beberapa macam gempa bumi berdasarkan penyebabnya, yakni sebagai berikut:
1. Gempa bumi runtuhan
Disebabkan antara lain oleh kerutuhan yang terjadi baik di atas maupun di bawah permukaan tanah, misalnya akibat tanah longsor, salju longsor, atau batu jatuhan. 2. Gempa bumi vulkanik
Disebabkan oleh kegiata gunung berapi baik sebelum maupun pada saat meletusnya gunung tersebut.
3. Gempa bumi tektonik
Disebabkan oleh terjadinya pergeseran kulit bumi (lithosphere) yang umumnya terjadi di daerah patahan kulit bumi.
Gempa yang paling menimbulkan kerusakan paling luas adalah gempa tektonik. Gempa bumi tektonik terjadi akibat gerakan tiba-tiba dari kulit bumi karena energi yang dikandungnya melampaui energi yang dapat diterima oleh kulit bumi. Kulit bumi yang didominasi oleh komponen silikat terbagi-bagi dalam sejumlah lempeng kaku yang merupakan mosaik. Masing-masing lempeng mempunyai pergerakan sendiri. Kulit bumi yang kaku ini dapat bergerak karena letaknya yang mengambang di atas lapisan mantel yang plastis.
1. Subduction
Interaksi antar lempeng yang tebalnya hampir sama, di mana lempeng pertama tenggelam di bawah lempeng kedua. Biasanya terjadi di sepanjang busur pulau. 2. Transcursion
Interaksi antara dua lempeng, di mana keduanya dapat berupa lempeng laut atau antar lempeng lempeng laut dengan lempeng benua yang bergerak horizontal satu terhadap lainnya.
3. Extrusion
Interaksi antara dua lempeng tipis yang bergerak saling menjauh
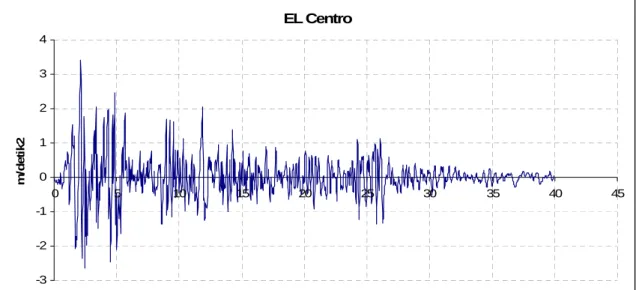
Energi yang dilepaskan saat terjadinya gempa akan ditransfer melalui media perantara yakni batuan dasar ke tempat lain, sejauh energi tesebut masih merambat. Energi tersebut ditransfer dalam bentuk getaran (gelombang). Gelombang ini kemudian ditransfer oleh batuan dasar ke lapisan tanah di atasnya, yang kemudian bisa dirasakan oleh manusia dan komponen lainnya di permukaan bumi seperti bangunan. Goyangan oleh gelombang gempa memiliki percepatan. Percetan inilah yang menimbulkan gaya geser pada pondasi yang besarnya sesuai dengan hukum kedua Newton, yakni F = ⋅m a, di mana m adalah massa bangunan. Untuk detail gaya-gaya yang terjadi pada struktur bangunan akan dibahas lebih dalam pada bab berikutnya. Bentuk gelombang yang ditransfer bisa diidentifkasi dengan adanya alat seismograf. Sebagai contoh dari bentuk beban gempa yang terukur dengan baik adalah gempa El-centro berikut di bawah ini.
EL Centro -3 -2 -1 0 1 2 3 4 0 5 10 15 20 25 30 35 40 45 Waktu (detik) m/ d e ti k 2