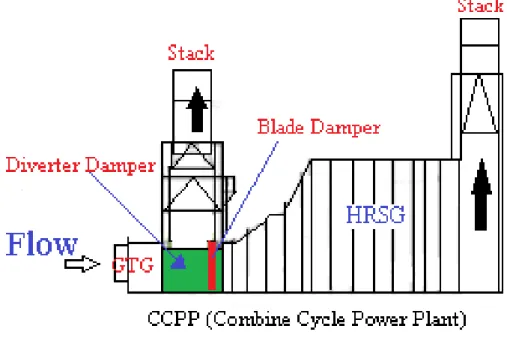
5 2.1 Diverter Damper
Diverter damper adalah salah satu komponen PLTGU yang berfungsi untuk
mengatur besarnya flow (debit) sisa gas pembakaran dari GTG masuk ke dalam HRSG.
Gambar 2.1 Letak diverter damper
Mekanisme kerja dari diverter damper adalah fluida bertekanan yang ada pada
actuator diubah menjadi gerak mekanis untuk mendorong arm torque sehingga blade damper akan membuka secara penuh (combine cycle). Pada gambar 2.1
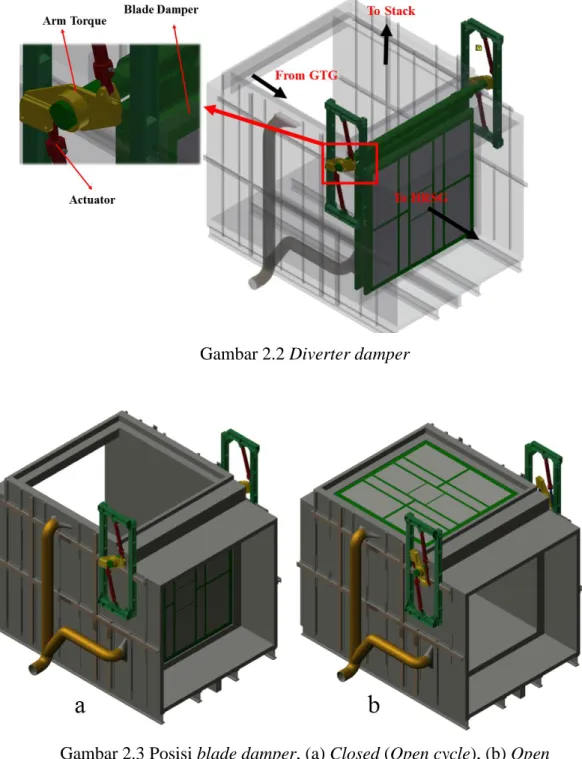
ditunjukkan letak dari diverter damper yaitu berada diantara GTG dan HRSG diberi warna hijau dan blade damper dengan warna merah pada posisi closed (open cycle). Detail dari diverter damper dan arah aliran gas ditunjukkan pada gambar 2.2 sedangkan posisi blade damper ketika open cycle dan combine cycle ditunjukkan pada gambar 2.3(a) dan gambar 2.3(b).
Gambar 2.2 Diverter damper
Gambar 2.3 Posisi blade damper, (a) Closed (Open cycle), (b) Open (Combine cycle)
Pada diverter damper terdapat beberapa komponen utama yaitu sistem mekanis, sistem hidrolik, dan seal air fan.
2.1.1 Komponen Sistem Mekanis Diverter Damper A. Blade Damper
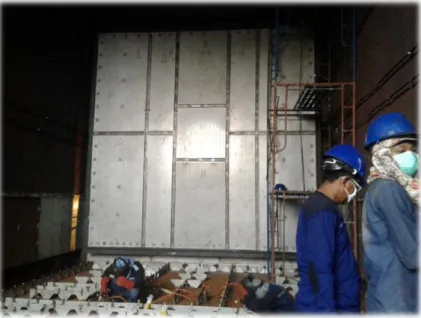
Blade damper berfungsi sebagai katup (valve) untuk mengatur aliran gas dari
GTG menuju HRSG. Blade damper pada HRSG memiliki bobot 3.5 - 5 ton, lebar 5060 mm, tebal 670 mm dan tinggi 5058 mm ditunjukkan pada gambar 2.4 dan gambar 2.5.
Gambar 2.4 Blade Damper di PT Indonesia Power UP Semarang
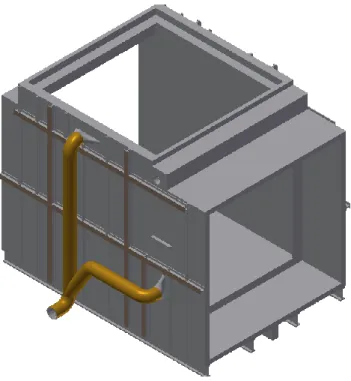
B. Diverter Damper Casing
Diverter damper casing berfungsi untuk mengatur aliran gas sisa pembakaran
dari GTG menuju HRSG. Selain itu diverter damper casing berfungsi sebagai dudukan komponen sistem mekanis dan sistem hidrolik serta sistem pendukung yang lain. Pada diverter damper casing terdapat saluran udara dari sisi luar yang digunakan saat proses open cycle, saluran tersebut berfungsi mencegah gas sisa pembakaran masuk ke dalam HRSG. Gambar 2.6 menunjukkan bentuk dari pipa saluran udara dengan warna kuning. Gambar 2.6 dan gambar 2.7 adalah bentuk dan dimensi dari diverter damper casing.
Gambar 2.7 dimensi dari diverter damper casing
C. Arm Torque
Arm torque berfungsi untuk mengubah gerakan translasi actuator menjadi
gerak rotasi pada blade damper. Gerakan rotasi digunakan untuk membuka dan menutup blade damper sehingga dapat mengatur aliran gas sisa pembakaran. Pada gambar 2.8 dan gambar 2.9 adalah bentuk dan dimensi dari arm torque.
Gambar 2.9 Dimensi Arm torque
D. Actuator
Actuator berfungsi untuk mengubah tekanan hidrolik menjadi geraktranslasi.
Pada gambar 2.10 dan gambar 2.11 merupakan bentuk dan ukuran dari actuator di PT Indonesia Power UP Semarang. Bagian plunger pada actuator dihubungkan dengan arm torque dan bagian cylinder dihubungkan dengan
frame.
Gambar 2.11 Dimensi Actuator
E. Frame
Frame berfungsi sebagai dudukan untuk actuator. Frame terletak menempel
pada diverter damper casing disambung menggunakan las. Bentuk dan dimensi
frame ditunjukkan pada gambar 2..12 dan 2.13 sedangkan posisi ketika di assembly ditunjukkan pada gambar 2.2.
Gambar 2.13 Dimensi Frame
F. Hydraulic System
Hydraulic System berfungsi untuk menghasilkan tekanan fluida yang
digunakan untuk menggerakkan blade damper melalui actuator sehingga dapat membuka dan menutup. Gambar 2.14 adalah foto dari rumah sistem kontrol hidrolik, di dalamnya terdapat komponen utama sistem hidrolik seperti pompa,
relief valve, instrument, dan blader.
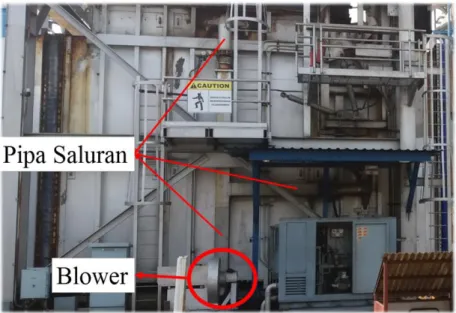
G. Seal Air Fan
Seal air fan berfungsi sebagai perapat dan mencegah gas panas sisa
pembakaran masuk ke dalam HRSG. Seal air fan ditunjukkan pada gambar 2.15 memiliki komponen utama blower dan pipa saluran. Seal air fan digunakan ketika sistem combine cycle di non aktifkan, cara kerja seal air fan dengan mengalikran udara dari luar yang dipompa menggunakan blower dan diteruskan ke dalam
diverter damper melalui pipa saluran seperti ditunjukkan pada gambar 2.15.
Gambar 2.15 Seal air fan
2.2 Software Perancangan
Pada perancangan sistem penahan blade damper pada PLTGU PT Indonesia Power UP Semarang penulis menggunakan software Autodesk Inventor Professional 2015 (AIP 2015). Sebagai perbandingan hasil simulasi dari software AIP 2015 penulis melakukan simulasi menggunakan software SolidWorks 2015. Pada sub bab di bawah ini akan dijelaskan pengertian dan fungsi dari masing-masing software yang digunakan.
2.2.1 Autodesk Inventor Professional 2015 (AIP 2015)
Autodesk Inventor Professional (AIP) adalah salah satu perangkat lunak (software) jenis Computer Aided Drawing (CAD) yang lebih menekankan pada pemodelan solid. Perangkat lunak ini adalah salah satu produk dari Autodesk Inc. Autodesk Inventor lebih ditujukan untuk penggambaran teknik pemesinan (Mechanical Engineering) yang menyediakan secara lengkap fasilitas untuk memvisualisasikan model dalam 3D, gambar rakitan (assembly), gambar kerja (drawing), analisa tegangan (stress analysis), dan animasi dari benda yang akan dibuat secara digital. Stess analysis AIP menggunakan metode elemen hingga (finite element methode)/Finite Element Analysis atau yang sering disebut FEA.
Gambar 2.16 Logo Autodesk Inventor Professional 2015
Pada Autodesk Inventor terdapat pilihan beberapa template yang terdapat pada halaman depan seperti ditunjukkan pada gambar 2.17. Template pada Autodeks Inventor Professional 2015 mempunyai kegunaan dan fungsi yang berbeda sesuai pekerjaan yang dibutuhkan.
Berikut adalah penjelasan pada masing-masing template :
1. Sheet Metal.ipt
Digunakan untuk membuat bidang kerja baru untuk part atau komponen berjenis
metal seperti benda-benda yang terbuat dari plat besi yang ditekuk-tekuk.
2. Standard.dwg
Digunakan membuat bidang kerja baru untuk gambar kerja 2D.
3. Standard.iam
Digunakan untuk membuat bidang kerja baru berupa gambar assembly yang terdiri atas beberapa part atau komponen.
4. Standard.idw
Digunakan membuat bidang kerja baru untuk gambar kerja 2D.
5. Standard.ipn
Digunakan untuk membuat bidang kerja baru berupa animasi urutan perakitan dari gambar assembly yang telah dirakit. Kita dapat memanfaatkannya untuk membuat gambar Explode View.
6. Standard.ipt
Digunakan untuk membuat bidang kerja baru berupa part atau komponen secara umum tanpa spesifikasi khusus seperti dalam pembuatan part pada Sheet Metal.
2.3 Pasak (Key)
Pasak adalah potongan baja karbon yang diselipkan antara poros dan hub dan sejajar dengan sumbu poros. Pasak digunakan sebagai pengunci sementara dan menerima tegangan geser.
Jenis pasak ada 5 macam yaitu sunk keys, saddle keys, tangent keys, round
keys, dan splines.
2.3.1 Sunk Keys
Sunk keys diberikan setengah lubang pasak pada poros dan setengah lubang
pasak pada hub. Macam-macam sunk keys sebagai berikut:
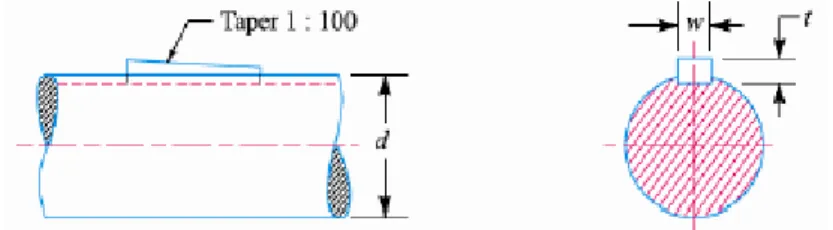
1. Rectangular Sunk Keys
Gambar 2.18 menunjukkan bentuk dari rectangular sunk keys. Lebar w=d/4, tebal pasak t=d/6, dimana d= diameter poros. Pasak memiliki ketirusan pada sisi atas 1:100.
Gambar 2.18 Rectangular sunk keys (Zainuri, 2010)
2. Square Sunk Keys
Square Sunk Keys memiliki jenis yang hampir sama dengan Rectangular sunk keys, perbedaan terjadi pada lebar dan ketebalan pasak. Square sunk keys memiliki lebar dan tebal yang sama.
3. Paralel Sunk keys
Paralel Sunk keys memiliki lebar dan ketebalan yang seragam dan tidak
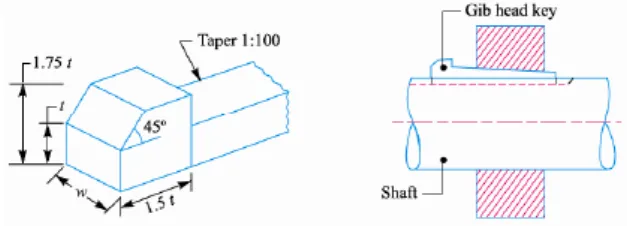
4. Gib-Head Keys
Pasak gib-head keys adalah sebuah rectangular sunk key dengan kepala pada salah satu ujung diketahui seperti gib-head key. Pasak ini biasanya digunakan untuk memudahkan pelepasan pasak sepertiditunjukkan pada gambar 2.19.
Gambar 2.19 Gib-head keys (Zainuri, 2010)
5. Feather Keys
Feather Keys adalah sebuah pasak yang dipasang antara poros dan hub
yang memungkinkan terjadinya pergerakan secara aksial. Pasak ini merupakan jenis khusus dari pasak sejajar yang mentransmisikan sebuah gerak putar dan juga gerak aksial. Pasak dikunci oleh salah satu poros atau hub. Gambar 2.20 menunjukkan pasak jenis feather keys. Pada tabel 2.1 menunjukkan variasi ukuran dari pasak jenis feather key, parallel key,
tapered key, dan gib-hed key.
Gambar 2.20 Feather Key (a). Feather key yang dikunci dengan ulir pada poros, (b). Feather key dengan gib head key. (Zainuri, 2010)
Tabel 2.1 Variasi ukuran dari pasak jenis feather key, parallel key,
tapered key, dan gib-hed key (Zainuri, 2010)
6. Woodruff Key
Woodruff key pasak ini dapat dipasang dengan mudah pada poros dan hub,
memiliki bentuk seperti potongan piringan silinder yang terdiri dari beberapa bagian penampang seperti ditunjukkan gambar 2.21.
Gambar 2.21 Woodruff Key (Zainuri, 2010)
2.3.2 Saddle Keys 1. Flat Saddle Key
Flat saddle key adalah pasak tirus yang terpasang pada lubang hub dan
datar terhadap poros seperti ditunjukkan pada gambar 2.22. pasak ini memungkinkan terjadinya slip sehingga digunakan untuk beban ringan
Width (m m ) Thickness (m m ) Width (m m ) Thickness (m m ) 6 2 2 85 25 14 8 3 3 95 28 16 10 4 4 110 32 18 12 5 5 130 36 20 17 6 6 150 40 22 22 8 7 170 45 25 30 10 8 200 50 28 38 12 8 230 56 32 44 14 9 260 63 32 50 16 10 290 70 36 58 18 11 330 80 40 65 20 12 380 90 45 75 22 14 440 100 50 Key cross-section Shaftt diam eter (m m ) upto
and including
Shaftt diam eter (m m ) upto and including
2. Hollow Saddle Key
Hollow Saddle Key adalah pasak yang terpasang pada lubang hub dengan
permukaan berbentuk lengkung pada poros dan hanya mampu menahan beban ringan. Pada gambar 2.22 menunjukkan pasak jenis hollow saddle
key.
Gambar 2.22 Pasak jenis flar saddle key dan hollow saddle key (Zainuri, 2010)
2.3.3 Tangent Keys
Pasak jenis tangent key hanya menerima beban satu arah seperti ditunjukkan pada gambar 2.23 dan cocok untuk poros yang menerima beban berat.
Gambar 2.23 Pasak jenis tangen key (Zainuri, 2010)
2.3.4 Round Keys
Round key seperti ditunjukkan pada gambar 2.24 berpenampang bulat dan
sesuai dengan lubang drill yang terpasang sebagian pada poros dan sebagian pada hub. Pasak ini biasa digunakan pada daya rendah.
2.3.5 Splines
Pada gambar 2.25 menunjukkan pasak jenis splines, pasak jenis ini memiliki lubang pada poros berjumlah 4, 10 atau 16 pasak sehingga lebih kuat daripada pasak tunggal.
Gambar 2.25 Pasak jenis splines (Zainuri, 2010)
2.3.6 Analisa Gaya Pada Sunk Key
Ketika pasak digunakan untuk mentransmisikan torsi dari sebuah poros ke hub, maka ada dua jenis gaya aksi yang terjadi.
1. Gaya F1 akibat tahanan pasak dalam lubang pasak. Gaya ini
menghasilkan tegangan tekan/tegangan normal yang sulit ditentukan. 2. Gaya F yang disebabkan oleh torsi pada poros. Gaya ini menghasilkan
tegangan geser dan tekan pada pasak. Sebuah pasak menghubungkan poros dan hub seperti ditunjukkan pada gambar 2.26.
Gambar 2.26 Poros dan pasak (Zainuri, 2010)
Tegangan geser akibat torsi: T = 𝐹 𝑥 𝑑
2 = 𝑙 𝑥 𝑤 𝑥 𝜏 𝑥 𝑑
Tegangan normal akibat torsi: T = 𝑙 𝑥 𝑡 2 𝑥 𝜎 𝑥 𝑑 2 (2.2) Dengan: T = Torsi (Nmm) F = Gaya normal (N) d = Diameter poros(mm) l = Panjang pasak (mm) w = Lebar pasak (mm) t = Tebal pasak (mm) σ = Tegangan normal (MPa) τ = Tegangan geser (MPa)
2.4 Bantalan (Bearing)
Menurut Sularso dan Suga, (1997), bantalan adalah elemen mesin yang menumpu poros berbeban, sehingga putaran atau gerakan bolak-baliknya dapat berlangsung secara halus, aman, dan panjang umurnya. Bantalan harus cukup kokoh untuk memungkinkan poros serta elemen mesin lainnya bekerja dengan baik. Jika bantalan tidak berfungsi dengan baik maka prestasi seluruh sistem akan menurun atau tidak berfungsi secara mestinya. Jadi, bantalan dalam permesinan dapat disamakan perannya dengan pondasi pada gedung. Bantalan dapat diklasifikasikan sebagai berikut :
1. Gerak bantalan terhadap poros. a. Bantalan luncur
Pada bantalan luncur ini terjadi gesekan luncur antara poros roda dan bantalan karena permukaan poros ditumpu oleh permukaan bantalan dengan perantara lapisan pelumas. Seperti terlihat pada gambar 2.27(a).
b. Bantalan gelinding
Gesekan gelinding antara bagian yang berputar dengan yang diam melalui elemen gelinding seperti bola (peluru), rol atau rol jarum, dan rol bulat. Seperti terlihat pada gambar 2.27(b).
Gambar 2.27 Bantalan (a). Bantalan luncur radial (b1). Bantalan gelinding radial dengan elemen silinder (b2). Bantalan gelinding radial dengan elemen bola (c). Bantalan gilinding aksial dengan elemen berbentuk jarum (d). Bantalan gelinding
radial dengan dua baris elemen berbentuk silinder (e). Bantalan kombinasi (Nugroho, 2014)
2. Arah pembeban terhadap poros
a. Bantalan radial. Arah beban yang ditumpu bantalan ini adalah tegak lurus sumbu poros bantalan ini sering digunakan untuk komstir pada sepeda motor, sepada, mobil dll.
b. Bantalan aksial. Arah beban bantalan ini sejajar dengan sumbu poros. c. Bantalan gelinding khusus. Bantalan ini dapat menumpu beban yang
arahnya sejajar dan tegak lurus dengan sumbu poros.
2.5 Sambungan Ulir
2.5.1 Pengertian Sambungan Ulir
Sebuah ulir (screwed) dibuat dengan melakukan pemotongan secara kontinyu alur melingkar pada permukaan silinder. Sambungan ulir sebagian besar terdiri dari dua elemen yaitu baut (bolt) dan mur (nut). Sambungan ulir banyak digunakan pada mesin yang membutuhkan kemudahan dalam menyambung dan melepas kembali tanpa merusak komponen. Hal ini, dilakukan dengan maksud untuk menyesuaikan/menyetel pada saat perakitan (assembly) atau perbaikan.
2.5.2 Istilah Penting Pada Ulir
Istilah berikut digunakan pada ulir seperti pada Gambar 2.28.
Gambar 2.28. Istilah pada ulir (Zainuri, 2010)
Keterangan Gambar 2.28:
1. Major diameter adalah diameter terbesar pada ulir eksternal atau internal. Dinamakan juga outside atau nominal diameter.
2. Minor diameter adalah diameter terkecil pada ulir eksternal atau internal. Dinamakan juga core atau root diameter.
3. Pitch diameter adalah diameter rata-rata silinder. Dinamakan juga effective
diameter.
4. Pitch adalah jarak antar puncak ulir. Secara matematika dapat dihitung:
pitch = 1
jumlah puncak ulir per unit panjang ulir
5. Crest adalah permukaan atas pada ulir.
6. Root adalah permukaan bawah yang dibentuk oleh dua sisi berdekatan dari ulir.
7. Depth of thread adalah jarak tegak lurus antara crest dan root. 8. Flank adalah permukaan antara crest dan root.
9. Angle of thread adalah sudut antara flank ulir. 10. Slope adalah setengah pitch ulir.
2.5.3 Ulir Matrix
Ulir matrix banyak digunakan dilambangkan dengan huruf M, misalnya M8 x 1.25, atau M8 x 1.5, seperti pada gambar 2.29.
Gambar 2.29 Metrik thread (Zainuri, 2010)
2.5.4 Jenis Sambungan Ulir 1. Through bolts
Pada Through bolts baut dan mur mengikat dua bagian/plat secara bersamaan. Jenis baut ini banyak digunakan pada baut mesin dan lain-lain. Seperti terlihat pada gambar 2.30(a).
(a) (b) (c) Gambar 2.30Jenis sambungan ulir (a). Through bolts, (b). Tap bolt, (c). Stud
2. Tap bolts
Pada tap bolt ulir dimasukkan ke lubang tap pada salah satu bagiannya dikencangkan tanpa mur. Seperti terlihat pada gambar 2.30(b).
3. Stud
Stud pada ujungnya cenderung berulir semua. Salah satu ujung ulir
dimasukkan ke lubang tap kemudian dikencangkan, sementara ujung yang lain ditutup dengan mur. Seperti pada gambar 2.30(c).
2.5.5 Sambungan Baut Akibat Beban Eksentris
Beberapa aplikasi sambungan baut yang mendapat beban eksentris seperti
bracket, tiang crane, dll. Beban eksentris dapat berupa:
1. Sejajar dengan sumbu baut. 2. Tegak lurus dengan sumbu baut. 3. Dalam bidang baut.
2.5.6 Beban Eksentris Yang Sejajar Terhadap Dengan Sumbu Baut
Pada Gambar 2.31 ada empat baut yang mana setiap baut mendapat beban tarik utama W
t1 =W/n, dimana n adalah jumlah baut.
Gambar 2.31 Beban eksentris yang sejajar dengan sumbu baut (Zainuri, 2010)
Keterangan:
w = Beban baut per unit jarak terhadap pengaruh balik bracket
W
Besar beban setiap baut pada jarak L
1 adalah:
W
1 = w × L1 (2.3)
Dan besar momen gaya terhadap sisi tepi adalah:
W
1= w × .L1 × L1 = w × (L1)2
(2.4) Besar beban setiap baut pada jarak L
2 adalah:
W
2 = w × L2 (2.5)
Dan besar momen gaya terhadap sisi tepi = w
. × L2 × L2 = w × (L2) 2
Total momen gaya pada baut terhadap sisi tepi adalah: 2 w . × (L1) 2 + 2 w . × (L2) 2 ( 2.6)
Besar momen akibat beban W terhadap sisi tepi adalah:
W × L (2.7)
Dari persamaan (2.6) dan (2.7), diperoleh:
W× L = 2 × w × (L1)2 + 2 × w ×(L 2)2 w = W× L 2× [(L1)2 + (L 2)2] (2.8)
Beban tarik dalam setiap baut pada jarak L
2 adalah:
𝑊𝑡2 = 𝑊2 = 𝑤 × 𝐿2 = 𝑊 × 𝐿 × 𝐿2 2 × [(𝐿1)2 + (𝐿
2)2] (2.9)
Beban tarik total pada baut yang terbebani paling besar adalah:
W
t = Wt1 + Wt2 (2.10)
Jika d
c adalah diameter core (minor) dari baut dan σt adalah tegangan tarik untuk
material baut, maka total beban tarik W
t adalah sebagai berikut:
𝑊t = 𝜋
4 (dc)2 × σt (2.11)
Dari persamaan (2.10) dan (2.11), nilai d
2.5.7 Beban Eksentris Yang Tegak Lurus Terhadap Sumbu Baut
Sebuah dinding breacket membawa beban eksentris yang tegak lurus terhadap sumbu baut seperti pada gambar 2.32 di bawah ini.
Gambar 2.32 Beban eksentris yang tegak lurus terhadap sumbu baut (Zainuri, 2010)
Dalam kasus ini, baut menerima beban geser utama yang sama pada seluruh baut. Sehingga beban geser utama pada setiap baut adalah:
W
s = W/n, (2.12)
Keterangan :
n = Jumlah baut
Beban tarik maksimum pada baut 3 dan 4 adalah seperti pada persamaan (2.13). 𝑊𝑡2= 𝑊𝑡= 𝑤 × 𝐿2 =
𝑊 × 𝐿 × 𝐿2
2 × [(𝐿1)2+ (𝐿2)2] (2.13)
Ketika baut dikenai geser yang sama dengan beban tarik, kemudian beban ekuivalen dapat ditentukan dengan hubungan berikut:
Beban tarik ekuivalen adalah:
𝑊𝑡𝑒 = 12× [𝑊𝑡+ √(𝑊𝑡)2+ 4(𝑊𝑆)2 ] (2.14)
Dan beban geser ekuivalen adalah sebagai berikut: 𝑊𝑠𝑒 = 12× [√(𝑊𝑡)2+ 4(𝑊
2.5.8 Jenis Ulir
Menurut Sularso dan Suga, (1997), ulir digolongkan menurut bentuk profit penampangnya sebagai berikut: ulir segi tiga, persegi, trapesium, gigi gergaji, dan bulat. Bentuk persegi, trapesium, dan gigi gergaji, pada umumnya dipakai untuk penggerak atau penerus gaya, sedangkan ulir bulat dipakai untuk menghindari kemacetan karena kotoran.
Ulir segi tiga diklasifikasikan lagi menurut jarak baginya dalam ukuran metris dan inchi, dan menurut ulir kasar dan ulir lembut sebagai berikut:
1. Seri ulir kasar metris (Tabel 2.2 dan Tabel 2.3) 2. Seri ulir kasar UNG
3. Seri ulir lembut metris 4. Seri ulir lembut UNF
2.5.9 Dimensi Ulir Standar
Dimensi desain JIS B 0205, untuk ulir, baut dan mur dapat dilihat pada tabel 2.2 dan tabel 2.3 berikut:
Tabel 2.2 Dimensi mur dan baut JIS B 0205, (Sularso dan Suga 1997) Diameter nominal (d = D) Gang (P) Diameter tengah (d1 = D2) Baut Mur Diameter terkecil (d3) Luas tegangan tarik (As1 (mm^2)) Diameter terkecil (d1) Diameter mata bor M 1 M 1,2 M 1,6 M 2 M 2,5 M 3 M 4 M 5 M 6 M 8 M 10 M 12 M (14) M 16 M (18) 0.20 0.25 0.35 0.4 0.45 0.5 0.7 0.8 1 1.25 1.5 1.75 2 2 2.5 0.838 1.038 1.373 1.740 2.208 2.675 3.545 4.480 5.350 7.188 9.026 10.863 12.700 14.701 16.376 0.69 0.89 1.71 1.51 1.95 2.39 3.14 4.02 4.77 6.47 8.16 9.85 11.55 13.55 14.93 0.46 0.73 1.27 2.07 3.39 5.03 8.78 14.2 20.1 36.6 58.0 84.3 115 157 192 0.73 0.93 1.22 1.57 2.01 2.46 3.24 4.13 4.91 6.65 8.37 10.10 11.83 13.83 15.29 0.75 0.95 1.25 1.5 2 2.5 3.3 4.2 5 6.8 8.5 10.2 12 14 15.5
Tabel 2.3 Ukuran standar ulir metris kasar (JIS B 0205), (Sularso dan Suga 1997).
2.6 Actuator
Actuator berfungsi untuk menghasilkan gerak atau usaha yang merupakan
hasil akhir dari sistem hidrolik/pneumatik. Macam-macam aktuator:
1. Linear Motion Actuator (Penggerak lurus)
a. Single Acting Cylinder (Silinder Kerja Tunggal) b. Double Acting Cylinder (Sistem Kerja Ganda)
Ulir (1) Jarak bagi p Tinggi Kaitan H1 Ulir dalam Diameter luar D Diameter efektif D2 Diameter dalam D1 1 2 3 Ulir luar Diameter luar d Diameter efektif d2 Diameter inti d1 M 0,25 M 0,3 M 0,35 0,075 0,08 0,09 0,041 0,043 0,049 0,250 0,300 0,350 0,201 0,248 0,292 0,169 0,213 0,253 M 0,4 M 0,5 M 0,45 0,1 0,1 0,125 0,054 0,054 0,068 0,400 0,450 0,500 0,335 0,385 0,419 0,292 0,342 0,365 M 0,6 M 0,55 M 0,7 0,125 0,15 0,175 0,068 0,081 0,095 0,550 0,600 0,700 0,469 0,503 0,586 0,415 0,438 0,511 M 0,8 M 1 M 0,9 0,2 0,225 0,25 0,108 0,122 0,135 0,800 0,900 1,000 0,670 0,754 0,838 0,583 0,656 0,729 M 1,2 M 1,4 M 1,7 0,25 0,3 0,35 0,135 0,162 0,189 1,200 1,400 1,700 1,038 1,205 1,473 0,929 1,075 1,321 M 2 M 2,3 M 2,6 0,4 0,4 0,45 0,217 0,217 0,244 2,000 2,300 2,600 1,740 2,040 2,308 1,567 1,867 2,113 M 3 x 0,5 M 3,5 0,5 0,6 0,6 0,271 0,325 0,325 3,000 3,000 3,500 2,675 2,610 3,110 2,459 2,350 2,850 M 4 x 0,7 M 4,5 0,7 0,75 0,75 0,379 0,406 0,406 4,000 4,000 4,500 3,515 3,513 4,013 3,242 3,188 3,688 M 5 x 0,8 0,8 0,9 0,9 0,433 0,487 0,487 5,000 5,000 5,500 4,480 4,415 4,915 4,134 4,026 4,526
2. Rotary Motion Actuator (Limited Rotary Actuator) a. Air Motor (Motor Pneumatic)
b. Rotary Actuator
Pemilihan dari jenis aktuator disesuaikan dengan fungsi, beban, dan tujuannya.
2.6.1 Single Acting Cylinder
Silinder ini mendapat suplai tenaga hanya dari satu sisi saja, untuk mengembalikan pada posisi semula digunakan pegas. Gambar 2.33 menunjukkan silinder jenis single acting.
Gambar 2.33 Jenis actuator (a). Single acting cylinder, (b). Simbol untuk
Single acting cylinder (Wirawan dan Pramono, 2008)
Silinder terdiri dari beberapa komponen seperti: torak (plunger), seal, pegas, dan silinder.
2.6.2 Double Acting Cylinder
Silinder ini mendapatkan suplai fluida bertekanan dari dua sisi, konstruksi hampir sama dengan silinder kerja tunggal. Keuntungan dari silinder ini adalah dapat memberikan tenaga pada kedua sisinya. Gambar 2.34 menunjukkan konstruksi dari silinder penggerak ganda.
Gambar 2.34 Double Acting Cylinder dan simbolnya (Wirawan dan Pramono, 2008)
2.7 Tegangan Normal (Normal Stress)
Tegangan normal adalah intensitas gaya yang bekerja normal (tegak lurus) terhadap irisan dan dilambangkan dengan σ (sigma), apabila ada gaya luar yang bekerja pada suatu batang sejajar terhadap sumbu utama dan potongan penampang batang konstan seperti pada irisan A gambar 2.35 maka gaya tersebut akan didistribusikan secara merata. Gaya-gaya seperti itu disebut dengan gaya aksian dan tegangan yang timbul dikenal tegangan aksial. Untuk menyelidiki tegangan-tegangan internal yang timbul akibat gaya aksial dibuat potongan garis khayal pada irisan A yang tegak lurus dengan sumbu longitudinal batang. Irisan A disebut luas penampang, sehingga tegangan yang bekerja tegak lurus dengan luas penampang, dapat dirumuskan sebagai berikut :
𝜎 =𝐹 𝐴 𝑎𝑡𝑎𝑢 𝑔𝑎𝑦𝑎 𝑙𝑢𝑎𝑠 (2.16) dengan: σ = Tegangan normal (N/mm2) F = Gaya normal (N) A = Luas penampang (mm2)
2.8 Tegangan Geser (Shear Stress)
Seperti ditunjukkan pada gambar 2.36 bahwa gaya-gaya yang disalurkan dari sebuah bagian benda kepada benda lainnya menimbulkan tegangan-tegangan dalam bidang sejajar dengan gaya.
τ =𝐹 𝐴 𝑎𝑡𝑎𝑢 𝑔𝑎𝑦𝑎 𝑙𝑢𝑎𝑠 (2.17) dengan: τ = Tegangan geser (N/mm2) F = Gaya geser (N) A = Luas penampang (mm2)
Gambar 2.36 Tegangan geser (Popov, 1984)
2.9 Regangan Normal (Normal Strain)
Regangan (Strain) didefinisikan sebagai perbandingan nilai pertambahan panjang (ΔL) dengan panjang awal (L0) yang disebabkan gaya pada ujung benda
yang berlawan arah (menjauhi pusat benda).
∈ =𝛥𝐿𝐿 0 (2.18) dengan:
ϵ
= Regangan normal ΔL = Perubahan panjang (mm) L0 = Panjang awal (mm)Regangan merupakan besaran yang tidak berdimensi, tetapi lebih baik memiliki dimensi meter per meter atau m/m sering kali regangan diberikan dalam bentuk prosen (%). Besarnya regangan sangat kecil, kecuali untuk beberapa bahan seperti karet. Gambar 2.37 menunjukkan regangan akibat gaya tarik F.
Gambar 2.37 Regangan
Mampatan hampir sama dengan regangan, yang membedakan adalah arah gaya. Untuk regangan arah gaya yang terjadi adalah ke arah luar (gaya tarik/menjauhi pusat benda) sedangkan mampatan gaya yang terjadi kearah dalam (gaya desak/mendekati pusat benda). Umumnya kekuatan tekan > kekuatan tarik sehingga dalam perencanaan cukup menggunakan kekuatan tarik. Gambar 2.38 menunjukkan regangan akibat gaya tekan F
Gambar 2.38 Mampatan
2.10 Hukum Hooke
Hubungan antara tegangan dan regangan berbentuk linier untuk semua material, hal ini menuju kepada penyetaraan (generalisasi) yang berlaku untuk semua material, yang dikenal sebagai hokum Hooke. Hukum Hooke dinyatakan dalam persamaan (2.19) di bawah ini.
atau 𝐸 =𝜎 ∈ (2.20) dengan: 𝐸 = Modulus elastisitas (N/mm2) σ = Tegangan (N/mm2) ∈ = Regangan Normal
Secara sederhanan tegangan berbanding lurus dengan regangan, karena
ϵ
tidak berdimensi maka dari persamaam 2.19 dan 2.20 E mempunyai satuan tegangan dalam SI yaitu N/m2 atau Pa.Secara grafis E ditafsirkan sebagai kemiringan (slope) dari garis lurus yang ditarik dari titik asal kearah titik A pada diagram tegangan-regangan. Tegangan yang didapat pada titik A pada gambar 2.39 dan gambar 2.40 tersebut dinamakan batas proporsional (proportional limit) dari bahan tersebut. Nilai modulus elastisitas merupakan suatu sifat yang pasti dari suatu bahan (popov, 1984).
Gambar 2.40 Diagram tegangan-regangan untuk material getas (popov, 1984)
2.11 Hukum Hooke Untuk Tegangan dan Regangan Geser
Apabila suatu benda diberi tegangan seperti gambar 2.41(a) maka akan terbentuk tegangan dan regangan geser pada benda tersebut. Tegangan geser yang terjadi akan menyebabkan perubahan bentuk pada benda elastis seperti keadaan yang ditunjukkan pada gambar 2.41(c). Perubahan bentuk terjadi pada benda homogen sempurna dan memiliki sifat-sifat yang sama pada semua arah. Diagonal-diagonal OA dan BC adalah sumbu-sumbu simetris pada elemen yang mengalami distorsi.
Gambar 2.41 Suatu elemen yang mengalamai geseran murni, (a). Tegangan geser dalam 3D, (b). Tegangan geser dalam 2D, (c). Efek akibat tegangan geser.
Dari uraian di atas diperoleh hubunga yang linier antara dan sudut 𝛾 (gamma) pada gambar 2.41(c). Apabila 𝛾 didefinisikan sebagai regangan geser (shear strain), maka perluasan hukum Hooke untuk tegangan dan regangan geser dapat dinyatakan sebagai berikut :
𝜏 = 𝐺𝛾 (2.21)
dengan:
τ = Tegangan geser (N/mm2)
G = Modulus geser (Gpa) 𝛾 = Regangan geser
Pernyataan untuk ketiga posisi regangan geser pada gambar 2.24(a) dapat dituliskan : 𝛾𝑥𝑦 =𝜏𝑥𝑦 𝐺 , 𝛾𝑦𝑧 = 𝜏𝑦𝑧 𝐺 , 𝛾𝑧𝑥 = 𝜏𝑦𝑧 𝐺 (2.22)
Untuk memudahkan, gambar 2.42(c) digambar ulang pada sumbu yang berbeda dengan sudut 𝛾 muncul pada satu sisi elemen yang mengalami distorsi ditunjukkan pada gambar 2.42. Besarnya regangan yang terjadi sangat kecil sehingga untuk masalah ketelitian dapat diselesaikan secara numerik.
Gambar 2.42 Distorsi akibat geseran murni (popov, 1984)
2.12 Gaya Normal (Normal Forces Diagram)/NFD
Gaya normal adalah gaya yang sejajar dengan sumbu batang, seperti ditunjukkan pada gambar 2.43.
Gambar 2.43 Normal forces diagram (NFD) (ma’arif, 2012)
Notasi :
a. Positif (+) jika gaya normal tarik b. Negatif (-) jika gaya normal tekan
Gambar 2.43 menunjukkan bahwa adanya gaya normal diakibatkan oleh beban sebesar Pα, jika diuraikan gayanya menjadi vertikal dan harisontal. Gaya arah horisontal akan dilawan oleh gaya PH (arah ke kanan) sehingga timbul gaya normal
tekan.
2.13 Gaya Geser (Shear Forces Diagram)/SFD
Gaya geser (Shear Forces Diagram) adalah susunan gaya yang tegak lurus dengan sumbu batang, ditunjukkan pada gambar 2.44.
Notasi :
a. Positif (+) apabila searah jarum jam b. Negatif (-) apabila berlawanan jarum jam
Gambar 2.45 Shear Forces Diagram (SFD) (ma’arif, 2012)
Pada gambar 2.45 menunjukkan bahwa nilai gaya geser akan memiliki nilai positif (+) apabila perputaran gaya yang searah jarum jam. Pada tumpuan A gaya memiliki perputaran searah jarum jam dan berlawan arah jarum jam pada tumpuan B.
2.14 Momen Banding (Bending Forces Diagram)/BMD
Momen adalah hasil kali antara gaya dengan jarak. Pada gambar 2.46 ditunjukkan bahwa momen terbesar berada pada titik C.
2.15 Modulus Elastisitas (Elasticity Modulus)
Modulus elastisitas adalah angka yang digunakan untuk mengukur ketahan bahan terhadap deformasi elastis akibat gaya yang bekerja. Modulus elastisitas juga didefinisikan sebagai kemiringan dari kurva tegangan-regangan pada daerah elastis. Bahan dengan kekakuan yang tinggi akan memiliki nilai modulus elastisitas yang besar, dilambangkan dengan huruf E dan memiliki satuan N/mm2.
2.16 Modulus Geser (Shear Modulus)
Modulus geser pada bahan dilambangkan dengan G, didefinisikan sebagai rasio antara tegangan geser terhadap regangan geser seperti pada persamaan 2.23 di bawah ini.
𝐺 = 𝜏/𝛾 (2.23)
dengan:
τ = Tegangan geser (N/mm2) G = Modulus geser (Gpa) 𝛾 = Regangan geser
Satuan dari modulus geser adalah Gpa (KN/mm2) dan selalu bernilai positif.
2.17 Poisson Rasio
Deformasi pada material tidak hanya searah dengan gaya yang bekerja tetapi juga terjadi pada arah tegak lurus dengan gaya yang disebut pemuaian dan penyusutan. Suatu benda diberi gaya tarik pada arah aksial maka akan terjadi penyusutan pada arah lateral dan begitu juga untuk pemuaian lateral pada gaya tekan arah aksial. Pemuaian dan penyusutan lateral ditunjukkan pada gambar 2.47 di bawah ini.
Gambar 2.47 Efek poisson; (a). Penyusutan lateral, (b). Pemuaian lateral (Popov, 1984)
Dari gambar 2.48 di atas diperoleh rumus poisson rasio adalah perbandingan dari regangan lateral dengan regangan aksial dilambangkan dengan 𝜐 (nu), seperti persamaan 2.24 dan persamaan 2.25.
𝜐 =𝑅𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝐿𝑎𝑡𝑒𝑟𝑎𝑙 𝑅𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝐴𝑘𝑠𝑖𝑎𝑙 (2.24) 𝜐 =Δ𝐷 𝐷0 𝑥 𝐿0 Δ𝐿 (2.25) dengan: 𝜐 = Poisson rasio D0 = Diameter awal (mm) Δ𝐷 = Perubahan diameter (mm) L0 = Panjang awal (mm) Δ𝐿 = Perubahan panjang (mm)
2.18 Hukum Hooke Secara Umum (3D)
Pada sub bab 2.11 di atas hukum Hooke didefinisikan sebagai perbandingan regangan lateral terhadap regangan aksial pada pembebanan secara aksial dan berlaku untuk keadaan tegangan yang uniaksial pada suatu benda. Pada sub bab ini ditinjau pada keadaan yang lebih umum untuk menghubungkan tegangan dengan deformasi pada suatu benda isotropik.
Sebuah balok yang sisi-sisinya adalah a, b, dan c diberi tegangan tarik secara
uniform pada seluruh permukaan benda seperti pada gambar 2.48(a). Tegangan
geser yang ada dihilangkan karena regangan yang disebabkan oleh tegangan normal tidak terpengaruh oleh deformasi geser yang kecil.
Perubahan panjang pada arah x diperoleh menggunakan azas superposisi berdasarkan asumsi resultan tegangan dan regangan pada jumlah aljabar dari efek masing-masing gaya bila dipisahkan. Asumsi ini benar apabila efek berbanding lurus dan linier dengan gaya. Berdasarkan prinsip tersebut di atas, efek-efek yang terpisahkan pada gambar-gambar 2.48(b), (c), dan (d) dapat dijumlahkan.
Gambar 2.48 Benda yang mengalami tegangan normal berdasarkan arah sumbu koordinat, (a). Tegangan ke segala arah, (b). Tegangan arah sumbu x, (c).
Tegangan arah sumbu y, (d). Tegangan arah sumbu z, (Popov, 1984)
Tegangan pada arah x menghasilkan regangan positif ∈ ′𝑥= 𝜎𝑥/𝐸. Tegangan
positif dalam arah y dan z menghasilkan regangan negatif dalam arah x akibat efek poisson. Regangan berturut-turut adalah ∈ ′′𝑥 = −𝑣𝜎𝑦/𝐸 dan ∈ ′′′𝑥 = −𝑣𝜎𝑧/𝐸. Regangan dalam arah y dan z dapat diperoleh dengan jalan yang yang sama, sehingga jumlah regangan-regangan aksial pada masing-masing ketiga arah adalah sebagai berikut ∈𝑥= + 𝜎𝑥 𝐸 − 𝑣 𝜎𝑦 𝐸 − 𝑣 𝜎𝑧 𝐸 (2.26) ∈𝑦= − 𝜎𝑥 𝐸 + 𝑣 𝜎𝑦 𝐸 − 𝑣 𝜎𝑧 𝐸 (2.27)
∈𝑧= −𝜎𝑥 𝐸 − 𝑣 𝜎𝑦 𝐸 + 𝑣 𝜎𝑧 𝐸 (2.28)
Bila suatu tegangan tertentu adalah tekan (kompresi), maka tanda dari suku-suku persamaan di atas akan berubah. Regangan yang diberikan oleh persamaan 2.26, 2.27, dan 2.28 harus dikalikan dengan dimensi suatu elemen menurut arah yang bersangkutan untuk mendapatkan deformasi total. Deformasi total pada arah x adalah:
∆𝑥= ∈𝑥 𝐿𝑥 (2.29)
Untuk menentukan nilai ∆𝑦 dan ∆𝑧 adalah sama dengan cara ∆𝑥.
2.19 Konsentrasi Tegangan
Rumus-rumus tegangan telah ditunjukkan pada persamaan 2.16 dan 2.27 dimana setiap tegangan yang terjadi disertai oleh nilai deformasi. Bila deformasi terjadi pada elemen-elemen yang berdampingan dengan tingkat keseragaman yang sama, maka pada bahan-bahan isotropik tidak akan terjadi tegangan tambahan selain yang diberikan oleh persamaan 2.16 dan 2.17 Ketika keseragaman dari luas penampang pada struktur berbeban aksial berbeda maka suatu gangguan pada tegangan dapat terjadi. Hal ini disebabkan oleh status deformasi pada elemen-elemen yang berbatasan harus kontinu secara fisis. Struktur tersebut harus meregang atau menciut dengan besaran yang sama. Deformasi yang dihasilkan dipengaruhi oleh sifat-sifat bahan E, G, dan v serta gaya yang terjadi pada struktur. Metode untuk mendapatkan distribusi tegangan yang terjadi dibahas dalam teori elastisitas matematis. Untuk menyelesaikan persoalan konsentrasi tegangan dilakukan dengan pendekatan numerik yang dirumuskan dengan metode elemen hingga untuk menentukan distribusi tegangan.
Pada gambar 2.49(a) ditunjukkan sebuah balok pendek yang dibebani dengan gaya sebesar P. Masalah ini dapat diselesaikan dengan persamaan 2.1. secara kualitatif adalah nilai regangan haruslah maksimum disekitar gaya terpakai, sehingga tegangan yang terjadi maksimum. Hasil untuk nilai distribusi tegangan
normal pada berbagai irisan yang terjadi ditunjukkan pada gambar 2.49 (b), (c), dan (d).
Gambar 2.49 Distribusi tegangan disekitar gaya terpusat (Popov, 1984)
Dari gambar 2.50 diperlihatkan bahwa puncak tertinggi pada tegangan normal pada setiap irisan letak dekat dengan gaya terpakai. Untuk menentukan besarnya nilai tegangan puncak maka dikembangkan skema yang sesuai. Skema ini secara sederhana terdiri dari perhitungan tegangan dengan persamaan-persamaan elementer (seperti persamaan 2.16 dan 2.17) dan kemudian mengalikan hasil perhitungan tegangan dengan sebuah angka yang disebut faktor konsentrasi tegangan (stress concentration factor).
σ𝑚𝑎𝑥 = 𝐾
𝑃
𝐴 (2.30)
dengan:
σ = Tegangan normal maksimum (N/mm2) K = Faktor konsentrasi tegangan
P = Gaya yang bekerja (N) A = Luas penampang (mm2)
Pada gambar 2.49(d) bagian puncak sebesar seperampat lebar bagian konstruksi, K = 2.575 sehingga 𝜎𝑚𝑎𝑥 = 2,575 𝜎𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎
Gambar 2.50 Faktor konsentrasi tegangan dengan pembebanan tarik (Popov, 1984)
Gambar 2.50 di atas merupakan dua faktor konsentrasi tegangan dengan pembebanan aksial. Pada lubang melingkar adalah struktur berbentuk silinder dengan ukuran diameter yang sama pada semua sisi dan dilubangi tegak lurus dengan sumbu longitudinal. Lis kukuh merupakan struktur silinder dengan diameter yang berbeda pada ujungnya. Dari kedua struktur tersebut diperoleh bahwa perubahan bentuk dan ukuran akan menimbulkan konsentrasi tegangan pada bagian yang berbatasan seperti ditunjukkan pada gambar 2.51.
Gambar 2.51 Faktor konsentrasi tegangan K dalam bentuk perbandingan tegangan (Popov, 1984)
Gambar 2.51 di atas memperlihatkan tegangan maksimum terjadi pada bagian penampang yang mengalami perubahan bentuk sehingga besarnya tegangan maksimum dipengaruhi nilai K.
2.20 Transformasi Tegangan
Sebuah gaya internal yang diperoleh dari metode irisan dan bekerja pada sebuah luasan seperti pada gambar 2.52 kemudian gaya diletakkan pada sumbu koordinat cartesian ditunjukkan pada gambar 2.53. Pada posisi ini ΔF diuraikan menjadi 3 komponen seperti pada persamaan 2.31, 2.32, dan 2.33.
Gambar 2.52 Irisan benda yang diberi gaya (Popov, 1984)
𝜎𝑧 = lim ∆𝐴→0( ∆𝐹𝑧 ∆𝐴) (2.31) 𝜏𝑥 = lim ∆𝐴→0( ∆𝐹𝑥 ∆𝐴) (2.32) 𝜏𝑦 = lim ∆𝐴→0( ∆𝐹𝑦 ∆𝐴) (2.33)
Sebuah elemen kecil dari irisan benda diletakkan di sumbu koordinat cartesian. Pada elemen tersebut bekerja 3 buah tegangan di setiap sisinya (general
state of stress) tetapi tegagan ini memiliki harga yang sama dan memiliki 6 buah
komponen tegangan seperti gambar 2.54.
Gambar 2.54 General state of stress (Popov, 1984)
Untuk memudahkan analisa maka elemen tersebut akan dilihat pada sumbu z-y dan tegangan yang ada hanya 3 tegangan yaitu 𝜎𝑥, 𝜎𝑦, 𝑑𝑎𝑛 𝜏𝑥′𝑦′ yang disebut
state of stress 2D pada gambar 2.55.
Selanjutnya memindahkan sumbu xy ke sumbu x’y’ dengan sebesar 𝛉 diperoleh persamaan transformasi tegangannya adalah:
𝜎𝑥′= 𝜎𝑥+𝜎𝑦 2 + 𝜎𝑥−𝜎𝑦 2 𝑐𝑜𝑠 2𝜃 + 𝜏𝑥𝑦𝑠𝑖𝑛 2𝜃 (2.34) 𝜎𝑦′=𝜎𝑥+𝜎2 𝑦−𝜎𝑥−𝜎2 𝑦𝑐𝑜𝑠 2𝜃 − 𝜏𝑥𝑦𝑠𝑖𝑛 2𝜃 (2.35) 𝜏𝑥′𝑦′= −𝜎𝑥−𝜎2 𝑦𝑠𝑖𝑛 2𝜃 + 𝜏𝑥𝑦𝑐𝑜𝑠 2𝜃 (2.36)
Tegangan prinsipal adalah tegangan normal maksimum yang bekerja pada sebuah elemen ketika harganya sama dengan nol. Untuk memperoleh tegangan prinsipal maka sumbu kerja tegangan ditransformasikan sebesar 𝛉P seperti pada gambar 2.56.
Gambar 2.56 pergeseran xy menuju x’y’ (Popov, 1984)
Persamaan 2.37 merupakan sudut yang menentukan bidang dengan tegangan normal maksimum dan minimum, sedangkan persamaan 2.38, 2.39 adalah besarnya tegangan normal dan regangan normal yang memiliki nilai maksimum minimum. tan 2𝜃𝑝 = 𝜏𝑥𝑦 (𝜎𝑥− 𝜎𝑦)/2 (2.37) 𝜎1,2 = 𝜎𝑥+ 𝜎𝑦 2 ± √( 𝜎𝑥− 𝜎𝑦 2 ) 2 + 𝜏𝑥𝑦2 (2.38) ∈1,2= ∈𝑥+∈𝑦 2 ± 1 2√(∈𝑥−∈𝑦) 2 + 𝛾𝑥𝑦2 (2.39)
Untuk besarnya sudut, tegangan, dan regangan geser maksimum minimum ditunjukkan pada persamaan 2.40, 2.41, dan 2.42.
tan 2𝜃𝑝 = −(𝜎𝑥− 𝜎𝑦)/2 𝜏𝑥𝑦 (2.40) 𝜏1,2 = ±√( 𝜎𝑥− 𝜎𝑦 2 ) 2 + 𝜏𝑥𝑦2 (2.41) 𝛾𝑚𝑎𝑥 2 = ± 1 2√(∈𝑥−∈𝑦) 2 + 𝛾𝑥𝑦2 (2.42)
2.21 Faktor Keamanan (Safety Factor)
Untuk desain pada bagian-bagian struktur tingkat tegangan disebut tegangan ijin (allowable stress) dengan nilai yang lebih rendah daripada tegangan maksimumnya. Berdasarkan persamaan sebelumnya bahwa tegagan dikalikan luas sama dengan gaya, maka tegangan ijin dan tegangan maksimum dapat diubah dalam bentuk gaya atau beban yang diijinkan dan tegangan maksimum yang dapat ditahan oleh sebuah benda. Suatu perbandingan (ratio) yang penting dapat dirumuskan.
𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑚𝑎𝑘𝑠𝑖𝑚𝑢𝑚 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑖𝑗𝑖𝑛 =
𝜎𝑚𝑎𝑥
𝜎𝑚𝑖𝑛 = 𝑆𝐹 (2.43)
Perbandingan ini disebut faktor keamanan (safety factor) dan harus lebih besar dari satu.
2.22 Momen Puntir (Torque)
Torsi adalah suatu puntiran sebuah batang yang disebabkan oleh gaya dengan jarak sebesar c dari sumbu longitudinal, seperti ditunjukkan pada gambar 2.57 dan persamaan 2.29.
Gambar 2.57 Variasi tegangan akibat torsi pada silinder pejal (Popov,1984)
Torsi yang terjadi pada poros menyebabkan adanya tegangan geser. Tegangan geser pada sumbu sebesar nol dan maksimum pada permukaan luar poros hal ini ditunjukkan pada persamaan 2.44 dan gambar 2.58.
𝑇 = 𝐹. 𝑐 (2.44)
dengan:
T = Torsi (N.mm)
F = Gaya yang bekerja (N) c = Jarak dari sumbu poros (mm)
𝜏 = 𝑇. 𝑐
𝐼 (2.45)
dengan:
𝜏 = Tegangan geser pada poros (N/mm2) T = Torsi (N.mm)
c = Jarak dari sumbu poros (mm) I = Momen inersia (mm4)
Torsi pada poros akan menyebabkan adanya simpangan yang terjadi pada poros dinyatakan dalam sudut ( ͦ ) seperti pada gambar 2.58 dan persamaan 2.46.
Gambar 2.58 Sudut geser akibat momen puntir (Zainuri, 2010) 𝜃 =𝑇. 𝐿 𝐼. 𝐺 (2.46) dengan: 𝜃 = Sudut geser ( ͦ ) T = Torsi (N.mm) L = Panjang poros (mm) I = Inersia polar (mm4) G = Modulus Geser (N/mm2) 2.23 Momen Bending
Momen bending merupakan tegangan yang terjadi akibat momen lentur yang bekerja pada benda. Momen bending menyebabkan terjadi tegangan tarik pada bagian atas dan tegangan tekan pada bagian bawah benda. Pada bagian sumbu merupakan bagian yang memiliki tegangan geser akibat momen bending sebesar 0, sehingga semakin besar jarak dari sumbu maka menyebabkan nilai tegangan akan meningkat. Momen bending ditunjukkan pada gambar 2.59.
Rumus untuk momen bending ditunjukkan pada persamaan 2.47. 𝑀 𝐼 = 𝜎𝑏 𝑦 (2.47) dengan: M = Momen bending (N.mm) I = Momen inersia (mm4) 𝜎𝑏 = Tegangan bending (MPa)
y = Jarak dari sumbu netral ke permukaan luar / jari-jari (mm)
untuk poros pejal, momen inersia :
𝐼 = 𝜋
64 𝑥 𝑑4 (2.48)
dengan:
d = Diameter poros (mm)
subtitusi ke persamaan (2.47) didapat:
𝑀 = 𝜋
32 𝑥 𝜎𝑏 𝑥 𝑑3 (2.49)
dengan:
M = Momen bending (N.mm) I = Momen inersia (mm4)
𝜎𝑏 = Tegangan bending (MPa)
d = Diameter poros (mm
2.24 Beban Kombinasi antara Momen Bending dan Momen Puntir
Ketika poros menerima momen torsi dan momen bending maka analisa dilakukan dengan beban secara simultan (bersamaan). Dua teori berikut sangat penting diketahui dalam perancangan :
1. Teori tegangan geser maksimum atau teori Guest’s digunakan untuk material yang ulet seperti baja karbon.
2. Teori tegangan normal maksimum atau teori Rankin’s digunakan untuk material getas seperti besi cor.
Tegangan geser maksimum dalam poros adalah :
𝜏𝑚𝑎𝑥 =
1
2√(𝜎𝑏)2+ 4𝜏2 (2.50)
Diketahui bahwa torsi untuk poros pejal : 𝑇 = 𝜋
16 𝑥 𝜏 𝑥 𝑑3 (2.51)
Dan momen bending :
𝑀 = 𝜋
32 𝑥 𝜎𝑏 𝑥 𝑑3 (2.52)
Subtitusi nilai τ dari persamaan (2.52) dan nilai 𝜎𝑏 dari persamaan (2.52).
𝜏𝑚𝑎𝑥 = 1 2√(32𝑀𝜋𝑑3) 2 + (16𝑇 𝜋𝑑3) 2 = 16 𝜋𝑑3[√𝑀2+ 𝑇2] (2.53) 2.25 Buckling
Buckling adalah kegagalan yang diakibatkan oleh ketidakstabilan suatu
elemen struktur yang dipengaruhi oleh gaya (beban tekuk). Beban tekuk adalah beban yang menyebabkan suatu kolom menekuk, beban ini disebut dengan beban kritis. Buckling terjadi pada struktur elemen dengan bentuk luas penampang yang konstan dan panjang, seperti ditunjukkan pada gambar 2.60. Pada gambar 2.43 menunjukkan sebuah kolom panjang dengan luas penampang yang konstan diberi beban maka kolom tersebut akan bengkok akibat beban yang diterimanya lebih dari beban kritis.
Gambar 2.60 Buckling pada kolom (Popov, 1984)
Penahan pada ujung kolom terdapat beberapa jenis yang menghasilkan tekukan dengan faktor panjang efektif (K) dan panjang efektif (L) yang berbeda-beda seperti ditunjukkan pada gambar 2.61.
Gambar 2.61 L dan nilai K pada berbagai jenis ujung kolom (Popov, 1984)
Dengan menggunakan persamaan Euler diperoleh rumus untuk beban kritis pada kolom seperti persamaan 2.54, tegangan kritis pada kolom ditunjukkan pada persamaan 2.55.
𝑃𝑐𝑟 = 𝜋2𝐸𝐼
Dengan :
P = Beban kritis (N)
E = Modulus elastisitas (MPa) I = Momen inersia (mm4)
K = Faktor panajang efektif (mm) L = Panjang efektif (mm) 𝜎𝑐𝑟 = 𝜋2𝐸 (𝐾𝐿𝑟 𝐺) 2 (2.55) Dengan :
𝜎𝑐𝑟 = Tegangan kritis (MPa) E = Modulus elastisitas (MPa) K = Faktor panajang efektif (mm) L = Panjang efektif (mm)
𝑟𝐺 = Jari-jari girasi (mm)
2.26 Teori Tegangan Geser Maksimum (Tresca)
Teori tegangan maksimum merupakan hasil dari pengamatan pada bahan material lunak/ulet, deformasi terjadi selama peluluhan (yielding) sepanjang bidang yang mengalami tegangan kritis. Tegangan geser maksimum sebagai peranan utama dan dianggap bahwa peluluhan bahan tersebut tergantung pada tegangan geser maksimum yang dicapai dalam sebuah elemen. Ketika harga kritis tertentu (τcr ) tercapai maka peluluhan pada suatu elemen tersebut mulai terjadi. Menurut
persamaan 2.56, bila σx = ± σ1 ≠ 0, dan σy = τxy = 0.
𝜏𝑚𝑎𝑥 𝑚𝑖𝑛 = ±√( 𝜎𝑥− 𝜎𝑦 2 ) 2 + 𝜏𝑥𝑦2 (2.56)
Maka,
𝜏𝑚𝑎𝑥 = 𝜏𝑐𝑟 = |±𝜎1 2| =
𝜎𝑦𝑝
2 (2.57)
𝜎𝑦𝑝 merupakan tegangan luluh yang diperoleh dari pengujian tarik material,
sehingga tegangan geser maksimum yang bersangkutan besarnya adalah setengah. Untuk menggunakan kriteria tegangan geser maksimum pada suatu status tegangan pada suatu sumbu ganda tertentu, maka harus ditentukan dahulu tegangan geser maksimumnya. Tegangan geser maksimum yang diperoleh kemudian disamakan dengan 𝜏𝑚𝑎𝑥 yang diberikan oleh persamaan 2.57. Dengan menyatakan tegangan geser maksimum untuk status tegangan yang diberikan dalam bentuk tegangan utama, kemudian menghilangkan angka 2 yang ada pada penyebut, maka diperoleh kriteria luluh sebagai berikut:
|𝜎1| ≤ 𝜎𝑦𝑝 dan |𝜎2| ≤ 𝜎𝑦𝑝
|𝜎1−𝜎2| ≤ 𝜎𝑦𝑝
(2.58) (2.59)
Persamaan 2.58 berlaku apabila σ1 dan σ2 mempunyai tanda yang sama,
sedangkan persamaan 2.59 berlaku apabila σ1 dan σ2 mempunyai tanda yang
berlawanan. Untuk tegangan-tegangan utama yang berlawanan tanda maka tegangan geser terbesar diberikan oleh (σ1-σ2)/2. Pada gambar 2.62 menunjukkan
σ1 dan σ2 sebagai koordinat sebuah titik pada daerah tegangan σ1-σ2.
Gambar 2.62 Kriteria luluh berdasarkan tegangan geser maksimum (Popov, 1984)
Tegangan yang berada di dalam segienam pada gambar 2.62 tidak terjadi peluluhan pada bahan. Ketika tegangan yang terjadi menyentuh titik-titik pada segienam memperlihatkan bahwa bahan tersebut sedang mengalami peluluhan.
2.27 Teori Distorsi Energi Maksimum (Von Mises)
Kriteria lain mengenai peluluhan bahan isotropik yang ulet yang diterima secara luas adalah berdasarkan konsep energi. Pada pendekatan ini energi elastis total dibagi menjadi dua bagian yaitu yang berhubungan dengan perubahan volumetrik bahan dan penyebab distorsi (gangguan) geser pada bahan. Dengan menyamakan energi distorsi geser pada titik luluh dalam pengaruh tegangan tarik sederhana dan di bawah pengaruh tegangan gabungan, kita dapat membuat kriteria luluh untuk tegangan gabungan.
Syarat luluh untuk bahan plastis secara ideal di bawah status tegangan triaksial dapat diperoleh dalam bentuk tegangan utama sebagai berikut:
(𝜎1− 𝜎2)2 + (𝜎3− 𝜎3)2+ (𝜎3− 𝜎1)2 = 2𝜎𝑦𝑝2 (2.60)
Untuk tegangan bidang 𝜎3 = 0, maka persamaan 2.60 dalam bentuk tanpa
dimensi menjadi: (𝜎1 𝜎𝑦𝑝) 2 + (𝜎1 𝜎𝑦𝑝 𝜎2 𝜎𝑦𝑝) + ( 𝜎2 𝜎𝑦𝑝) 2 = 1 (2.61)
Persamaan 2.61 di atas merupakan sebuah ellips, seperti ditunjukkan pada gambar 2.64. Tegangan yang terletak di dalam ellips menunjukkan bahwa bahan bersifat ulet sedangkan titik pada ellips menunjukkan bahan dalam keadaan meluluh ditunjukka pada gambar 2.63. Gambar 2.63 merupakan penafsiran yang sama dari gambar 2.62.
Teori ini tidak memperkirakan perubahan bahan tersebut apabila ditambah tegangan tarik atau tekan hidrostatik. Persamaan 2.61 menunjukkan hanya perbedaan tegangan yang terdapat pada persamaan tersebut, sehingga penambahan
tegangan yang konstan pada masing-masing tidak mempengaruhi syarat luluh, oleh karena itu permukaan luluh berbentuk silinder. Besarnya sudut kosinus dari ketiga arah dengan sumbunya adalah sama yaitu 1√3. Silinder ditunjukkan pada gambar 2.64. Ellips dalam gambar 2.63 merupakan potongan antara silinder dengan bidang 𝜎1− 𝜎2
Gambar 2.63 Kriteria luluh berdasarkan energi distorsi maksimum (Popov, 1984)
Gambar 2.64 Permukaan luluh untuk status tegangan tiga dimensi (Popov, 1984)
2.28 Metode Elemen Hingga (Finite Element Methode)
Finite Element Methode (FEM) atau yang biasa disebut dengan Finite Element Analysis (FEA) adalah prosedur numeris yang dapat dipakai untuk
menyelesaikan masalah-masalah dalam bidang rekayasa (engineering), seperti analisa tegangan pada struktur, perpindahan panas, elektromagnetis, dan aliran fluida. Metode ini digunakan dalam masalah-masalah rekayasa dimana exact
solution/analysical solution tidak dapat menyelesaikannya. Kerja dari FEM adalah
dengan membagi suatu benda yang akan dianalisa menjadi beberapa bagian dengan jumlah hingga (finite). Bagian-bagian dari tiap elemen dihubungkan dengan nodal (node). Kemudian dibangun persamaan matematika yang menjadi representasi benda tersebut. Gambar 2.65 adalah proses pembagian benda menjadi beberapa bagian disebut meshing.
Gambar 2.65 Meshing pada plate (MechanicalBrothers, 2011)
Pada tahun Pada tahun (1954) Argyris dan Kelsey mengembangkan analisa struktur metode matrik menggunakan metode energi. Pengembangan ini menunjukkan pentingnya pendekatan prinsip energi dalam penyelesaian persamaan-persamaan metode elemen hingga. Istilah finite element diperkenalkan oleh Clough (1960) saat menggunakan elemen segitiga dan segi empat dalam
analisa tegangan bidang (plane stress analysis). Hingga tahun 1950-an, metode matriks dan metode elemen hingga sulit digunakan dalam menyelesaikan persamaan-persamaan yang kompleks sehingga tidak praktis ketika digunakan, dengan hadirnya computer maka perhitungan dari penyelesaian persamaan dari sistem struktur dapat diselesaikan dengan cepat (Handayanu,2006).
2.29 Transformasi Koordinat
Koordinat yang banyak digunakan dalam metode elemen hingga adalah koordinat kartesian, koordinat sering dinyatakan dalam bentuk vector yang dijabarkan sebagai berikut :
Gambar 2.66 Tranformasi Koordinat 2 Dimensi (Sonief, 2003) 𝑃 = {𝑋𝑌𝑝 𝑝} 𝑃 = { 𝑋′𝑝 𝑌′𝑝} 𝑋′𝑝 = 𝑋𝑝𝐶𝑜𝑠𝜃 + 𝑌𝑝𝑆𝑖𝑛𝜃 (2.62) 𝑌′𝑝 = −𝑋𝑝𝑆𝑖𝑛𝜃 + 𝑌𝑝𝐶𝑜𝑠𝜃 (2.63) {𝑋𝑌𝑝 𝑝} = [𝐶𝑜𝑠𝜃 − 𝑠𝑖𝑛𝜃𝑆𝑖𝑛𝜃 𝐶𝑜𝑠𝜃] {𝑋′𝑌′} (2.64) [𝑇]−1= [𝑇]𝑇→ 𝑜𝑟𝑡ℎ𝑜𝑔𝑜𝑛𝑎𝑙𝑖𝑡𝑦
Koordinat dinyatakan dalam 3 dimensi 𝑂𝑟𝑖𝑒𝑛𝑡𝑎𝑠𝑖 𝑌′(𝑙 1, 𝑚1, 𝑛1) 𝑂𝑟𝑖𝑒𝑛𝑡𝑎𝑠𝑖 𝑌′(𝑙 2, 𝑚2, 𝑛2) 𝑂𝑟𝑖𝑒𝑛𝑡𝑎𝑠𝑖 𝑌′(𝑙 3, 𝑚3, 𝑛3)
{𝑋 ′ 𝑌′ 𝑍′} = [ 𝑙1𝑚1𝑛1 𝑙2𝑚2𝑛2 𝑙3𝑚3𝑛3] { 𝑋 𝑌 𝑍 } (2.65)
Gambar 2.67 Tranformasi Koordinat 3 Dimensi (Sonief, 2003)
2.30 Hubungan Tegangan-Regangan
Berikut adalah rumus-rumus yang menjelaskan hubungan antara Tegangan – Regangan. 𝜀𝑥= 𝜎𝑥− 𝑣. 𝜎𝑦 − 𝑣. 𝜎𝑧 𝐸 (2.66) 𝜀𝑦 = 𝜎𝑦− 𝑣. 𝜎𝑥− 𝑣. 𝜎𝑧 𝐸 (2.67) 𝜀𝑧 = 𝜎𝑧− 𝑣. 𝜎𝑥− 𝑣. 𝜎𝑦 𝐸 (2.68) 𝛾𝑥𝑦 = 𝜏𝑥𝑦 𝐺 ; 𝛾𝑥𝑧 = 𝜏𝑥𝑧 𝐺 ; 𝛾𝑧𝑥 = 𝜏𝑧𝑥 𝐺 ; (2.69) 𝐺 = 𝐸 2(1 + 𝑣) (2.70) Dimana: E = Modulus Elastisitas (N/m2) v = Poisson’s ratio σ = Tegangan Normal (N/m2) τ = Tegangan Geser (N/m2)
{𝜀} = [𝐶]. {𝜎} (2.71) {𝜀}𝑇= {𝜀 𝑥𝜀𝑦𝜀𝑧𝜀𝑥𝑦𝜀𝑧𝑦𝜀𝑧𝑥} (2.72) 𝑐 = 1 𝐸 [ 1 −𝑣 −𝑣 0 0 0 −𝑣 1 0 0 0 0 −𝑣 −𝑣 1 0 0 0 0 0 0 2. (1 + 𝑣) 0 0 0 0 0 0 2. (1 + 𝑣) 0 0 0 0 0 0 2. (1 + 𝑣)] (2.73) Selanjutnya: {𝜎} = [𝐸′]{𝜀} (2.74) Dengan: ε = Regangan E = Modulus Elastisitas (N/m2) Dimana: [𝐸′] = 𝐸 1 + 𝑉 [ 𝑎 𝑏 𝑏 0 0 0 𝑏 𝑎 𝑏 0 0 0 𝑏 𝑏 𝑎 0 0 0 0 0 0 𝑐 0 0 0 0 0 0 𝑐 0 0 0 0 0 0 𝑐] (2.75) 𝑎 = 1 − 𝑉 1 − 2𝑉; (2.76) 𝑏 = 𝑉 1 − 2𝑉; (2.77) Dengan: 𝑐 =12 [𝐸′] = [𝐶]−1 (2.78)
2.31 Material Sistem Mekanis Diverter Damper
Tabel 2.4 sampai 2.9 adalah karakteristik material yang digunakan pada sistem mekanis diverter damper.
Tabel 2.4 Spesifikasi material SS 321 (AK Steel, 2013)
Yield Tensile Strength 241 MPa (34954 Psi)
Ultimate Tensile Strength 586 MPa (84992 Psi)
Young Modulus 193 GPa (2,8E+07 Psi)
Density 8,09 g/cm3 (0,29 lbf/in3)
Tabel 2.5 Spesifikasi material SS 347 (Aperam, 2017)
Yield Tensile Strength 345 MPa (50038 Psi)
Ultimate Tensile Strength 645 MPa (93549 Psi)
Young Modulus 193 GPa (2,8E+07 Psi)
Density 8 g/cm3 (0,289lbf/in3)
Tabel 2.6 Data material mild steel (Ashby dan Jones, 1980)
Yield Tensile Strength 220 MPa (31908 Psi)
Ultimate Tensile Strength 430 MPa (62366 Psi)
Young Modulus 193 GPa (2,8E+07 Psi)
Density 7,8 g/cm3 (0,282 lbf/in3)
Tabel 2.7 Spesifikasi material ductile iron (Aggressive Hydraulics, 2016)
Yield Tensile Strength 517 MPa (75000Psi)
Ultimate Tensile Strength 800 MPa (116000 Psi)
Young Modulus 177 GPa (2,5E+07 Psi)
Tabel 2.8 Spesifikasi material AISI 1025 (Azo, 2017)
Yield Tensile Strength 370 MPa (53700 Psi)
Ultimate Tensile Strength 440 MPa (63800Psi)
Young Modulus 200 GPa (2,9E+07 Psi)
Density 7,3 g/cm3 (0,264 lbf/in3)
Tabel 2.9 Spesifikasi material AISI 440C (Azo, 2017)
Yield Tensile Strength 420 MPa (60915Psi)
Ultimate Tensile Strength 785 MPa (113854 Psi)
Young Modulus 210 GPa (3E+07 Psi)
Tabel 2.10 menunjukkan material yang digunakan pada sistem mekanis
diverter damper.
Tabel 2.10 Material pada sistem mekanis diverter damper
Komponen Material
Blade SS 321
Arm torque SS 321
Blade Shaft SS 347
Actuator (Plunger) Ductile Iron
Actuator (Cylinder) AISI 1025
Actuator (Pin) SS 321
Key 1 SS 347
Key 2 SS 347
Frame Mild Steel
Blade Damper Bearing AISI 440C