PENGATURAN KECEPATAN MOTOR DC SHUNT DENGAN MIKROKONTROLER M68HC11 - Diponegoro University | Institutional Repository (UNDIP-IR)
Teks penuh
Gambar




Dokumen terkait
diinginkan baik itu secara manual maupun dengan memasukkan nilai kecepatan motor yang diinginkan pada tampilan program pada setiap pengujian sistem. Ucapan
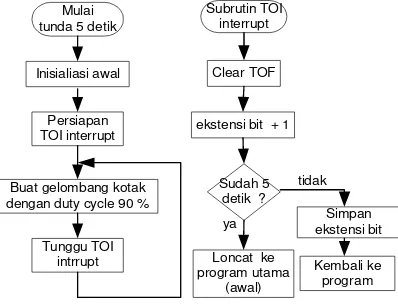
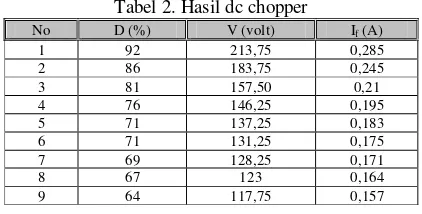
Kemudian pada blok mikrokontroller berfungsi sebagai pembentuk sinyal dc chopper yaitu pulsa-pulsa pwm untuk mengendalikan kecepatan motor dimana pulsa- pulsa
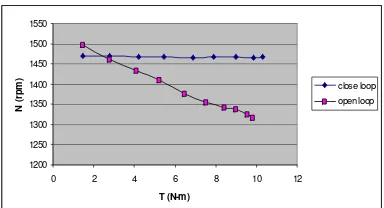
(b) Grafik relasi tegangan kendali terhadap waktu Gambar 18 Grafik pengendalian kecepatan motor DC. menggunakan PLL
Kemudian pada blok mikrokontroller berfungsi sebagai pembentuk sinyal dc chopper yaitu pulsa-pulsa pwm untuk mengendalikan kecepatan motor dimana pulsa- pulsa
mikrokontroller berfungsi sebagai pembentuk sinyal dc chopper yaitu pulsa-pulsa pwm untuk mengendalikan kecepatan motor dimana pulsa- pulsa keluaran mikrokontroller
Pengaturan kecepatan pada motor arus searah dilakukan untuk mendapatkan kecepatan motor sesuai dengan yang diinginkan.. Pengaturan kecepatan motor arus searah lebih mudah
Berikut tentang kecepatan motor shunt: Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torque tertentu setelah kecepatannya berkurang) dan
diinginkan baik itu secara manual maupun dengan memasukkan nilai kecepatan motor yang diinginkan pada tampilan program pada setiap pengujian sistem. Ucapan
