1. GİRİŞ
İmal usullerinden talaşsız imalat yönteminde oldukça sık kullanılan eksantrik presler, mekanik pres olarak da bilinmektedir. Ülkemizde eksantrik pres üretimi geniş bir yelpazede yaklaşık 250 firma tarafından yapılmaktadır. Bu kadar çok üretici olmasına karşın yaygın kullanılan bir teknik bulunmamaktadır. Çoğunlukla tecrübeye dayalı yapılan üretimler istenmeyen durumların oluşmasına, malzeme israfına ve aynı zamanda gelişme önünde engellere neden olmaktadır.
Bu tezin amacı eksantrik pres imalatının kontrollü bir şekilde, mühendislik çalışmalarına dayanan bir yapıya ulaştırılmasıdır.
Eksantrik pres projelendirilmesinde birinci faktör müşteri istekleridir. Çalışılacak kalıp ölçülerine ve kullanılacak talaşsız imal usulüne göre bir dizayn gerekmektedir. Bu nedenle müşteri istekleri ve ilgili standartlar eşliğinde presin tipi ve bazı dış ölçüleri kendiliğinden elde edilmektedir. Pres üzerinde bulunan elemanların projelendirilmesi aşamasında ise istenen tonaja göre mukavemet hesaplarından çıkan sonuçlar kullanılmaktadır.
Bu tezde, kesme kalıbıyla çalışacak bir firmanın ihtiyacına yönelik bir tasarım yapılmıştır. Firmanın istediği çalışma tonajı 60 ton, eksantriklik 50 mm olup ölçüleri 710 mm x 550 mm (uzunluk x genişlik) olan bir plaka kullanılmak istenmektedir. Plaka (tabla) ölçüleri DIN 55173 Alman standardıyla belirtilen 60 ton için standart ölçülerdir. Tüm hesaplamalar bu ölçüler baz alınarak yapılacaktır.
Projelendirme aşamaları sırasıyla : Gövde grubu, krank grubu, başlık grubu, biyel grubu şeklinde olacaktır. Bu gruplarda bulunan pres makinesi elemanları da yine kendi grupları altında projelendirilecektir.
2. PRES GRUPLARININ PROJELENDİRİLMESİ
2.1 Pres Ana Elemanları
Bu bölümde presi oluşturan ve projelendirme aşamasında ilk sıralarda gelen elemanlara değinilecektir.
2.1.1 Gövde Grubu
Firma üretim şekline uygun olarak C tipi pres seçilmiştir. Bu seçimi yaparken firmanın hedeflediği üretim adedi, hızı, sac besleme şekli ve maliyet gibi parametreler göz önünde bulundurulmuştur.
Şekil 2.2. Pres ön görünüşü
Yukarıda verilen pres yan ve ön görünüşlerinde belirtilen “plaka uzunluğu”, “plaka genişliği” daha önce de belirttiğimiz gibi firma tarafından belirlenmiştir. Aynı zamanda maksimum kalıp yüksekliğine bağlı olarak da “açıklık” diye adlandırdığımız ölçü elde edilmektedir. Bu ölçülerin pres gövde tasarımında yerine koyulmasıyla krank milinin yatak merkezi koordinatları kısmen de olsa belirir. Tam yerinin belirlenebilmesi için başlık kızak ve biyel vida boylarının da seçilmiş olması gerekecektir.
Başlık kızak boyunun belirlenmesi için belirli bir yöntem yoktur. Bu değerler de ampirik yöntemlerle elde edilir. Burada önemli olan nokta, müşteri isteğinde belirlenen eksantriklik değeri referans alınmalıdır. Mumak Makine San. ve Tic. A.Ş.‟de kızak boylarını elde etmek
amacıyla ampirik bir formül geliştirilmiştir:
Başlık Kızak Boyu = [en uzun plaka boyu / 2 + maksimum eksantrik değer] x 1,3 (2.1)
Konstrüktif anlamda tasarımın netleşmesi açısından ihtiyaç duyduğumuz biyel vidası ve diğer elemanların ölçüleri ilerleyen aşamalarda belirtilecektir. Bunlarla beraber dişli çiftlerinin yerleştirilmesi ve ağırlık merkezinin de ortada tutulması dış gövde tasarımında elemanların pozisyonlanacağı noktaları kesinleşecektir.
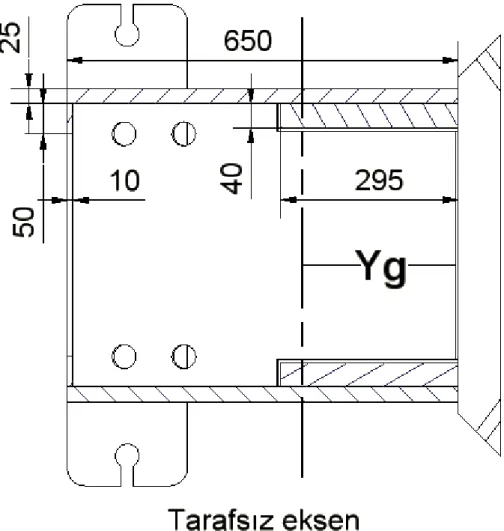
Mukavemet açısından bakıldığında gövdeye etkiyen maksimum gerilmeleri hesaplarken kuvvet etkisi altında kalan gövde kesitinden faydalanacağız. Bunun için;
Yg =
i gi i A Y A .(ağırlık merkezinin bulunması) (2.2)
Ixg =
Ixg
Ai Yg2i (Stainer teoremi-eylemsizliklerin ötelenmesi) (2.3)
c I
Wxg xg (c: tarafsız eksene olan uzaklık) (2.4)
l F
Meğ . (l: krank ekseninden tarafsız eksene olan uzaklık) (2.5)
xg eğ eğ W M (2.6) formülleri kullanılacaktır.
Şekil 2.3. Pres kesit görüntüsü
Elde edilen gerinim değerleri emniyetli gerinim değerleriyle karşılaştırılıp tasarımın uygunluğu irdelenecek ve gerekiyorsa takviyeler yapılacaktır.
Baskı kuvveti (F) etkisiyle pres gövdesinin ön kısmı tarafsız eksene göre çeki etkisiyle gerilecektir. Arkada kalan kısım ise kuvvet ile tarafsız eksene göre moment kolunun karşı tarafında kaldığından bası etkisiyle gerilecektir. Aynı zamanda yukarı doğru uygulanan baskı kuvveti bütün kesiti çekmeye zorlayacaktır. Bütün bu hususlar dikkate alındığında bileşik gerinimlerin toplanması ve toplam etkinin irdelenmesi gerekecektir.
Şekil 2.4. Baskı kuvvetinin oluşturduğu gerilmeler
Presin ön kısmında üstteki şekilden de görüleceği gibi çeki gerilmesiyle eğme gerilmesinin toplamı etkirken, arka kısmında ise bu ikisinin farkı etkimektedir. Bunları hesaplarken ;
A F çeki
(çeki gerilmesi) (2.7)
Presin arka kısmında : em eğ çeki top (2.9)
bağıntılarıyla oluşan gerilmeler bulunur.
Elde edilen bu gerilmeler sonlu elemanlar analiz programıyla (T-Flex v. 9.35) doğrulanmaya çalışılacaktır. Fakat bu değerlerle bilgisayar tarafından elde edilecek değerler arasında farkların olması kaçınılmazdır.
Pres ön görünüşünden (Şekil 2.2) açıkça görülen yan saclar arası mesafe de plaka boyutlarına bağlı olarak birtakım mukavemet hesaplarına göre bulunmaktadır. “Presin genişliği” diye adlandırdığımız bu açıklığı projelendirirken plakayı maksimum şekilde mesnetleyecek yapıda bir seçim yapmamız gerekecektir. Bu değere göre birçok değer de bağıl olarak değişecektir. Krank miline uygulanacak momentin büyüklüğü, başlığın genişliği, yatak boyutları gibi birçok parametre bu açıklıktan etkilenecektir. Birçok değişken olduğu için bize gereken ve birinci önceliğe sahip olan plakayı maksimum şekilde mesnetleyen tasarım dikkate alınacaktır. Ayrıca bu değerler uluslararası standartlarda yer almaktadır ve tasarımını yaptığımız preste de standart ölçü kullanılmıştır.
2.1.2 Krank ve Angrenaj Grubu
Preslerde, pres boyutlarına oranla fazla güç gerektiği durumlarda angrenaj mili ile bir dişli sistemi oluşturulur ve krankın uyguladığı moment tahvil oranında katlanır. Fazladan güç istendiği durumlarda yapılması gereken volanın ebatlarının büyütülmesidir. Ancak pres gövdesine kıyasla çok büyük bir volan hem dengesizliğe hem de tasarım açısından sakıncalara yol açmakta, pres ölçüleri değişmektedir. Bu nedenle angrenaj uygulaması yaygın kullanılmaktadır.
Angrenaj milinin ilettiği moment bizim için referans teşkil edecek fiziksel büyüklüktür. Öncelikle angrenaj miliyle büyüklüğü katlanacak olan momente esas ihtiyacı olan krank
milini incelememiz gerekecektir.
Krank mili aşağıdaki şekilde de görüleceği gibi dönüşlerde eksantriklik yapacak şekilde tasarlanan bir mildir ve biyelle birlikte bir mekanizma haline gelip dairesel hareketi öteleme hareketine çevirir. Krank mili dinamiği detaylı olarak incelendiğinde maksimum gücün alt ölü noktaya varmadan 30° içinde elde edildiği bilinmektedir. Tasarımlar bu 30° içinde maksimum güç kullanılacak şekilde yapılacaktır Lisans tezi seviyesinde bir çalışma olduğundan krank milinin dinamiği analiz edilmeyecektir.
Şekil 2.5. Krank mili
Krank mili üzerinde konstrüksiyon gereği kama kanalları, eksantrik kavramanın şekil bağlı olarak oturacağı geometri ve diğer geometriler bulunmaktadır.
Krank mili tasarımında önceliğimizi pres stroğuna bağlı olarak eksantrikliğe vermeliyiz. Müşteri istekleri doğrultusunda ayarlanabilir stroklu ve sabit stroklu presler olabilir. Bizim tasarımını yaptığımız pres ayarlanabilir stroklu istenmektedir ve strok 0-100 mm arası değişmesi istenmektedir. Buna bağlı olarak;
2 1 max max Strok /2 e e e (2.10) 1 2 min min Strok /2 e e e (2.11)
eşit seçilip 25‟er mm alınmıştır.
Mukavemet hesaplarını maksimum momenti elde edeceğimiz maksimum eksantrikliğe göre yapacağız.
Şekil 2.6. Krank mekanizması (Ölçekli çizilmiştir)
Bunun için; e L10. (ampirik ön kabul) (2.12) sin sin e L (2.13) sin . F T (2.14) formülleri kullanılır.
Elde edilen bu değerlerle krankın ihtiyacı olan döndürme momenti hesaplanabilir;
T e
Mkrnkdön . (2.15)
Bu döndürme momentini sağlıklı şekilde karşılayacak krank mili kesit ölçüleri burulma eğilmeye ve kesmeye göre kolaylıkla hesap edilecektir. Bunun için;
em krnk b W M dön (2.16) 12 .d3 W (2.17) A Fyatak kayma (2.18)
em p ang I G M . . max (2.19)
ve (2.6) no‟lu formül kullanılacaktır.
Angrenaj milinin sahip olması gereken döndürme momenti doğal olarak çevrim oranınca katlanması gerekir. Bunun yanında dişli çiftlerinin çalışma verimi de bu döndürme momentini etkileyecektir. Bu verim %100‟ün altında olduğundan kesinlikle daha yüksek alınması gerekecektir. dişiş ang dön krnk M i M .. (2.20)
Preste kullanılan redüksiyon oranı çalışma şeklini de değiştirecektir. Bu nedenle preste yapılacak işe ve çalışma şekline göre bir redüksiyon oranı seçmek gerekecektir. Örneğin sıvama işlemi yapılacaksa başlık hızının kontrollü olması gerekmekte ve dolayısıyla bir redüksiyon uygulanmışsa bu oran nispeten büyük seçilmelidir ki sac parçada bir deformasyon meydana getirmesin. Tabi burada sac malzemesi de önem kazanmaktadır. Tasarımını yaptığımız preste redüksiyon oranı olarak 5 seçilmiştir.
Bu veriler ışığında angrenaj milinin projelendirilmesi mümkün olmaktadır. Angrenaj miline bir burulma gerilmesi ve ucuna monte edilen volan ağırlığından ötürü bir de eğilme gerilmesi uygulanmaktadır. Volan boyutları henüz belli olmadığından ortalama bir kütle kabul edilip projelendirilecektir. Daha sonra geriye dönülerek düzeltmeler yapılacaktır.
Burulma hesabında krank milinin projelendirilmesinde kullanılan (2.6), (2.16), (2.17) ve (2.19) no‟lu formüllerden yararlanılacaktır.
2 2 . 3 b eğ top (2.21) formülü kullanılacaktır.
Krank ve angrenaj millerinin projelendirilmeleri neticesinde yataklanmaları için gerekli yatak tipi seçimlerinin yapılması gerekmektedir. Bunun için millere gelen yatak kuvvetleri, dişli çiftlerinden tesir eden radyal ve eksenel kuvvetleri belirlenmesi gerekmektedir. Ayrıca krank ve angrenaj millerinin çapları belirlendikten sonra dişlilerin pozisyonlanacağı şekle ve mukavemet hesabına göre ölçüleri elde edilecektir. Tasarıma devam edebilmemiz açısından bir kabul yaparak angrenaj mili yatak boşluklarını yüksek güçlerde tolere edecek şekilde yatakları oynak makaralı rulman tipinde seçeriz. Katalog değerlerine hesaplamalar kısmında yer verilecektir. Bunun yanında krank mili dengesiz olarak darbelere maruz kalacağından bronz malzemeyle desteklenmiş kaymalı yatakla yataklanacaktır. Burada yatak basınçlarına bakacağız; em yatak P D L F P . (2.22) 2.1.3 Dişli Çarklar
Angrenaj sisteminde bir pinyon ve bir de büyük olmak üzere 2 adet dişli çark kullanılmaktadır. Bütün gücün aktarıldığı nokta olması nedeniyle son derece hassas şekilde projelendilirmesi gerekmektedir.
Dişli çiftin ölçülerinin bulunmasında öncelikle dişli tipi (helis, düz vs.) seçilerek bir başlangıç yapılmalıdır. Mumak Mak. San. ve Tic. A.Ş‟de bugüne kadar üretilen 60 tonluk C tipi preslerde 5° açılı helis dişli kullanımı başarılı sonuçlar vermiştir. Gerek açı büyümesiyle oluşacak eksenel yatak kuvvetlerini azaltma gerekse çalışma uyumu açısından yüksek performans elde edilmiştir.
2 ). (z1 z2 ma a (2.23) cos n a m m (2.24) 1 2 i .z z ang (2.25)
formülleri kullanılarak modül, diş sayıları bulunur ve eksenler arası mesafe doğrulaması yapılır. Dişli çark çaplarını ve genişliklerini elde etmek için ise;
a m z d1 1. (2.26) a m z d2 2. (2.27) n m m B . (2.28) formülleri kullanılacaktır.
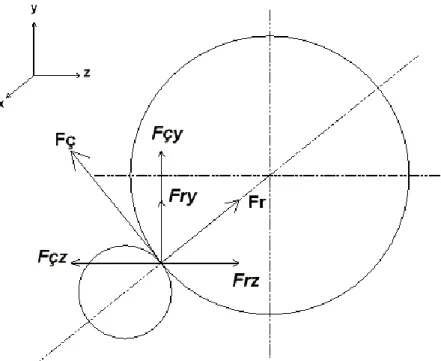
Dişli ölçülerinin çıkarılması sonrasında dişlilere uygulanan kuvvetlerin tespit edilmesi ve sonrasında diş dibi kesilmesi, ezilme kontrolü yapılması gerekmektedir. Öncelikle dişli çiftine gelen kuvvetleri gösterelim:
Şekil 2.7. Dişli çifti üzerindeki kuvvetler (pinyon ve büyük dişli) 2 d M F krnkdön ç (2.29) cos ç n F F (2.30) .tan sin . ç n a F F F (2.31) cos tan . ç r F F (2.32)
Büyük dişli için gösterilen kuvvetlerin tepkileri doğal olarak pinyon dişli üzerine etkiyecektir. Çizim üzerinde tekrar göstermeye gerek duyulmamıştır.
Helis dişli, çevre hızı ve normal işçilik bakımından bu değerler hesaplamalar kısmında tablolardan alınarak kullanılacaktır. Bunlara göre emniyetli gerilme değeri;
em n ç fm d e B m F K K . . . . (2.33) şeklinde olmalıdır.
Diş ezilme kontrolü için ise;
i i d B F K K K K K P m a d ç 1 . . . . . . 2 max (2.34) E Km 0,35. (2.35) .tan cos 1 2 a K (2.36) cos K (2.37) 1 K (2.38)
Bu veriler ışığında daha önce kabul yapıp seçtiğimiz rulmanlar ve krank kaymalı yatak boyları kontrol edilir, emniyetliyse tasarıma devam edilir, değilse uygun düzeltmeler yapılır.
2.1.4 Biyel Grubu
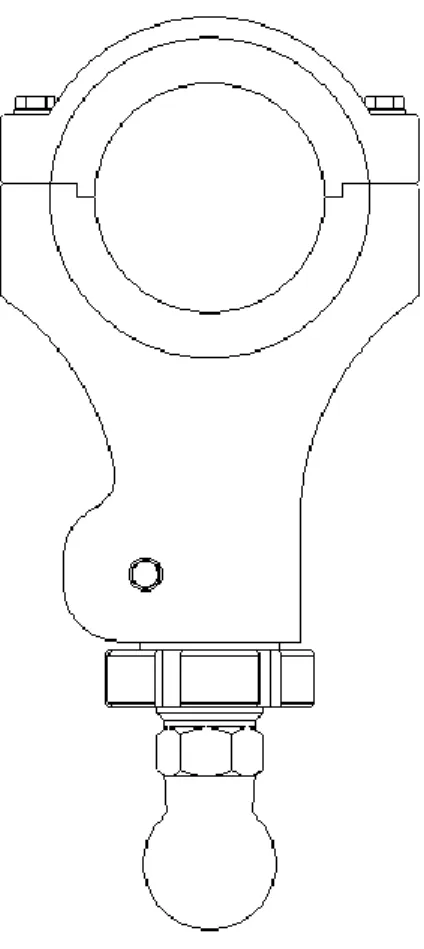
Krank-biyel mekanizmasını oluşturan elemanlardan biyel, krankın yaptığı eksantrik hareketi doğrusal harekete çeviren parçadır. Bütün baskı gücünü üzerinde toplayacak şekilde çalışır ve buna göre projelendirilmelidir. Bir ucu krankın eksantrik kısmına bağlı diğeri ise doğrusal hareket yapacak şekilde kızaklandığı için açısal hareketleri tolere edecek bir dizayna sahip olmalıdır. Bu nedenle biyel mekanizması içinde yer alan biyel vidasının ucu küresel olarak tasarlanmıştır.
Şekil 2.8. Biyel kolu ve biyel vidası montaj resmi
Biyel kolu tam gücü krank alt ölü noktaya gelmeden kalan 30° içinde yapacağından düşey eksenle çakışmayıp açılı bir şekilde pozisyonlanacaktır. Bu nedenle baskı kuvvetinden daha yüksek bir kuvvete maruz kalacak ve bu da bası gerilmesi olarak sonuçlanacaktır. Biyel vidasının küre ucu sayesinde uç tarafı serbest şekilde salınım yapacak ve son derece kaygan
aşamada sadece bası gerilmesine karşı ölçülendirilecektir. Basıya karşı emniyet kontrolü için öncelikle vida ucundaki kürenin çapının tayin edelim:
em küre P d F P 4 . ' 2 (2.39) cos ' F F (2.40)
Bunun dışında biyel vidasını biyel koluna montaj şeklimiz vida-somun prensibine dayandığı için biyel koluna ve vidasına açılması gereken uygun diş profilini de seçmemiz gerekecektir. Bu seçimi yaparken diş dibi çapının maksimum mukavemetine ve diş ortalama çapındaki ezilmeye bakacağız. Ezilme bakımından;
em P t d z F P . . . ' 2 (2.41)
Emniyetli basınca göre biyel vidasına açılması gereken diş sayısına ulaşılacaktır. Buradan biyel kolunun uzaması gereken minimum ve maksimum uzaklığa göre biyel vidasının toplam diş boyu elde edilecektir.
Vida diş dibinin kesilme kontrolü için;
em t d z F . . . ' 3 (2.42)
4 . ' 2 3 d F (2.43) formüllerinden yararlanılır.
Aynı şekilde biyel koluna vidanın monte edildiği kesit yüzeyi için de ezilme kontrolü yapmak gerekir; 4 . ' 2 .kolu b d F P (2.44) 2.1.5 Başlık Grubu
Genel olarak gayıt, kayıt vs. olarak adlandırılan başlık, preste kalıbın bağlanacağı ve doğrusal hareketin elde edildiği son elemandır.
Başlığın altta kalan ve kalıbın bağlandığı yüzeyin baskı kuvvetlerine karşı dayanıklı olması gerekir. Genelde küçük tonajlarda (150 ton aşağısı) kullanılan başlıklar dökme demirden imal edilir. Başlığın alt alanına göre bir basınç hesabı yaparak emniyetli olup olmadığı kontrol edilmelidir.
koç
A F
P (2.45)
Aynı zamanda başlığın geometrisi karmaşık olduğundan sonlu elemanlarla ayrıca bir mukavemet analizi yapılacaktır.
Eksantrik preslerde başlıkların kızak sayıları hassasiyet açısından önemlidir. Burada bir mukavemet hesabından çok şekil bağlı bir yataklama düşüncesiyle hareket edilmelidir. Kızak sayısı olarak 4, 8 kızak kullanılan presler vardır. C tipi preslerde ve özellikle aşırı hassas konstrüksiyon istenmediği takdirde 4 kızak tercih edilir. Kızaklar aşınmaları tolere edecek şekilde ya bronzla takviye edilir ya da dökme demirdeki grafitin yağlama özelliğinden faydalanılarak bronz kullanılmaz.
2.1.6 Volan Grubu
Eksantrik preste iş yapmak için gerekli olan enerji elektrik motorundan alınır. Fakat iş çevrimlerinde sürekli olarak motorun durup tekrar çalışması ve yeterli enerjiyi tek başına sağlayabilmesi için yüksek maliyetli bir motora ihtiyaç vardır. Bunun yanında presin elektrik tüketimi konusunda oldukça yüksek meblağlar elde edilir.
Bu tip makinalarda bir enerji düzensizliği olmaması ve gerektiğinde yüksek güçlerin karşılanabilmesi için enerji depolayan akülere ihtiyaç vardır. İşte mekanik anlamada bu akülere volan denmektedir ve eksantrik preste baş rol bu elemandadır.
Volanın geometrisi itibariyle sürekli dönüp bir enerji depolayacağından dairesel formda olması kaçınılmazdır. Dönme hareketinden kaynaklanan açısal hız ve kütlesinden
kaynaklanan ataletle bir dönme kinetik enerji depolar. Depolanan bu enerji preste iş yapmak amacıyla kullanılır. Pres iş yapılmadığı anlarda dönmesine devam ederek bir enerji sürekliliği meydana getirir. Volan için enerji ifadesini detaylandıracak olursak;
ang volan M M (2.46) volan M A . . 2 2 1 (2.47) 30 .n (2.48) g L D . 32 . . . 4 (2.49)
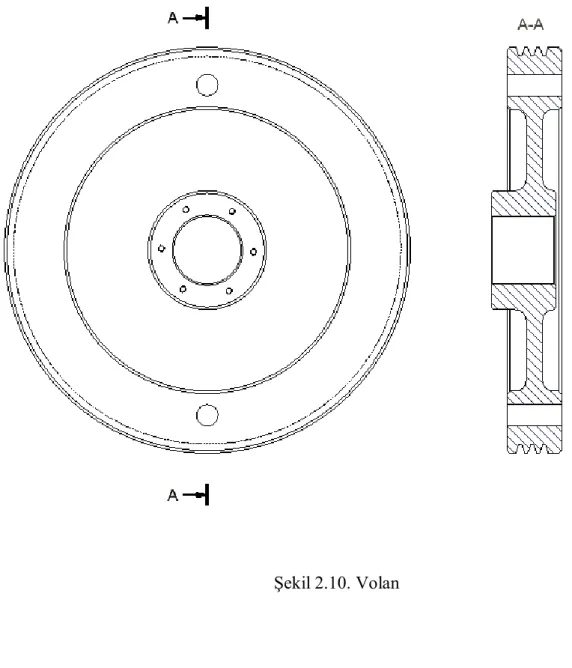
Bu ifadelerle pres için gerekli olan volan ölçülerine ulaşabiliriz ve volanla birlikte çalışacak olan kavrama tipi de momente bağlı olarak seçilir.
Şekil 2.10. Volan
2.2 Pres Yardımcı Elemanları
Bu bölümde pres üzerinde bulunan ve ikinci planda projelendirilmeleri gereken elemanlara değinilecektir.
2.2.1 Mekanik Sigorta
Eksantrik preslerde alt ölü noktaya yaklaşırken taranan 30° derece içinde maksimum güç verilir. Eğer kalıp bağlamada bir yanlışlık yapılırsa ya da iş parçası kalınlığı kalıbın kapanmasına engel oluyor ve kesme kuvveti yeterli olmayacak kalınlıktaysa bir sıkışma söz konusu olabilmektedir. Pres bu durumda alt ölü noktaya gelmesine rağmen kesme işlemi tamamlanamayacağından muazzam bir kuvvetle sıkışma olacaktır. Buna sanayide “bindirme”
denmektedir. Bu durumda prese olası sıkışmalarda korumak ve aşırı yüklenmelerde kesilmek üzere bir sigorta ilave edilir. Bu sigorta, kesiti belli bir kuvvete kadar dayanabilecek şekilde dizayn edilmeli ve kesilme anında çökerek presin sıkışmasını da önlemelidir. Bu gereksinimlerden hareketle en uygun tasarım aşağıdaki şekildeki gibi olmaktadır:
Şekil 2.11. Mekanik sigorta
Mekanik sigortayı projelendirirken en zayıf kesit olan iç çaptaki çevresel alana gelen kesme kuvveti üzerinde durulacaktır.Bunun için;
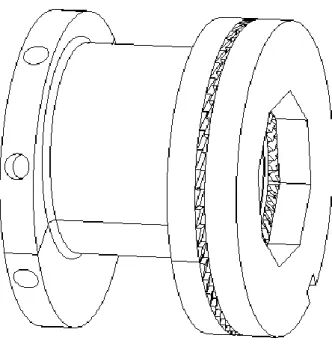
A F (2.50) formülü kullanılacaktır. 2.2.2 Eksantrik Kavrama
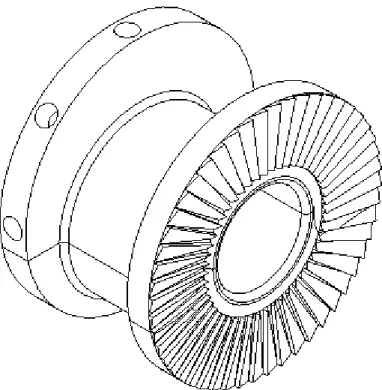
Biyel koluna bağlanarak istendiğinde eksantrikliği değiştirmemize imkan veren bu eleman değişik dizaynlara sahip olabilir. Sonuçta krank miline şekil bağlı olarak monte edileceğinden dizaynlar da buna göre yapılır. Mumak Makine San. ve Tic. A.Ş‟de kullanılan eksantrik kavrama tipi aşağıdaki gibidir:
Şekil 2.12. Eksantrik kavrama
Eksantrik kavrama projelendirilirken dişlerdeki kesme kuvveti göz önünde bulundurulacaktır. Bunun dışındaki parametreler diğer elemanlardan gelen ölçülere göre şekil kazanacaktır. Bu kavramanın görevimin yapabilmesi için bir de karşılığının olması gerekecektir. O da kranka şekil bağlı olarak monte edilecektir ve aynı şekilde diş profiline sahip olması gerekmektedir. Birleşmelerini gösteren resim ağıdaki gibidir:
Şekil 2.13. Eksantrik kavrama ve karşılığı montaj resmi
Diş başına gelen kesme kuvvetini bulmak için; em diş ort dön krnk A r M . 1 (2.51)
Dairesel geometriden oluşan diş kesit alanını hesaplayabilmek için bu alanı yamuk alanına benzetiriz ya da toplam yüzey alanının yarısı bize dişlerin toplam kesit alanını verecektir.
2.2.3 Kamalar
Pres üzerine birçok yerde kama kullanma ihtiyacı olacaktır.Krank miline bağlı büyük dişli angrenaj miline bağlı volan, pnömatik kavrama, ve pinyon dişlilerde kamalardan yararlanılacaktır. Bu kamaların emniyetli çalışabilmesi için uygun şekilde kataloglardan seçilmeleri gerekmektedir. Öncelikle angrenaj mili üzerindeki kamaları seçelim:
Angrenaj mili üzerinde volan ve pinyon dişli bulunmaktadır. Motordan iletilen momentin volandan angrenaj miline sağlıklı geçebilmesi için kamaların ezilmeye ve kesilmeye karşı uygun ölçülerde olmaları gerekmektedir. Sırasıyla ezilme ve kesilme açısından incelendiğinde; kama ang ç r M F (2.52) em ç P n l t F P . . 1 (2.53) em ç n l b F . . (2.54)
kama boyutları da (2.52), (2.53), (2.54) no‟lu formüllerden elde edilebilir.
Krank mili üzerinde bulunan büyük dişli için de benzer işlemler uygulanır;
kama dön krnk ç r M F (2.55)
ve yine aynı şekilde (2.53), (2.54) no‟lu formüller bize büyük dişli içindeki kamanın boyutlarını verecektir.
2.2.4 Plaka
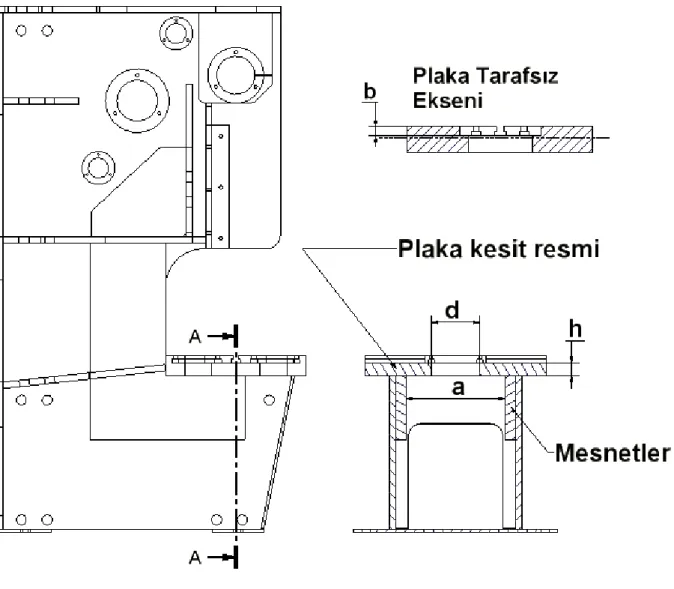
Preste dişi kalıbın (alt kısım) bağlanacağı plaka presin bütün kuvvetine maruz kalmaktadır. Bu nedenle emniyet sınırları içinde minimum şekilde şekil değiştirmesine izin verilmelidir.
Şekil 2.15. Plaka kesit resmi ve tarafsız ekseni
Plaka baskı altındayken orta eksenin göre eğilmeye çalışacaktır ve burada en çok etkilenecek olan kısım en zayıf kesit Şekil 2.15‟te gösterilmiştir. Bu kesite göre yapılacak mukavemet hesaplarına göre emniyetli plaka ölçüleri belirlenir. Plaka ölçülerini projelendirmede;
4 .a F M baskı maks plaka (2.56) em plaka maks plaka eğ W M (2.57)
h I
Wplaka plaka (2.58)
formülleri kullanılacaktır. Bunun dışında plaka için kesme ve ezilme kontrolü yapmak gerekirse yine daha önce bahsetmiş olduğumuz formüllerden yararlanabiliriz:
em mesnet baskı kesme kesit A F (2.60) em plaka baskı P A F P (2.61) 2.2.5 Dengeleyici Pistonlar
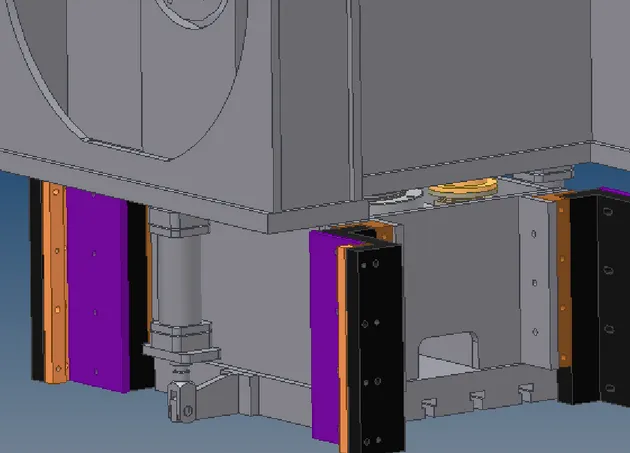
Eksantrik presleri çalışması eksantrik bir harekete bağlı olduğu için büyük başlık ve kalıp ağırlıkları ile yüksek hızlar birleşince muazzam titreşimler meydana gelebilir hatta pres olduğu konumundan çıkıp devrilebilir. Bu tip dengesizlikleri yok etmek veya azaltmak amacıyla pres gövdesiyle başlık arasına pistonlar bağlanıp basınçlı hava yardımıyla başlığın iniş hareketi yumuşatılır. Pnömatik piston denilen bu dengeleyiciler bildiğimiz silindir piston mantığıyla çalışan elemanlardır. Hava bağlantısı olmadan kör tapa ile kullanılabilirler fakat bir süre sonra sızıntılar nedeniyle iç basınç düşmeye başlayacağından verimli olmaz. Buna karşılık hava bağlantılı olarak sürekli sabit basınçta tutulup verimli bir çalışma elde edilmesi mümkündür.
Şekil 2.16. Pnömatik silindirin başlığa montajı
Pnömatik pistonları kullanma mantığı başlık ve kalıbın kendi ağırlıklarıyla bir kontrol ünitesi gerektirmeden havayı sıkıştırmasına dayanmaktadır. Bunun için kataloglardan uygun ağırlığa göre bir piston çifti seçmemiz gerekir. Tasarımını yaptığımız preste ortalama başlık ve bağlanacak kalıp ağırlığı fazla olmadığından bir dengeleme pistonu uygulamasına gerek duyulmamıştır.
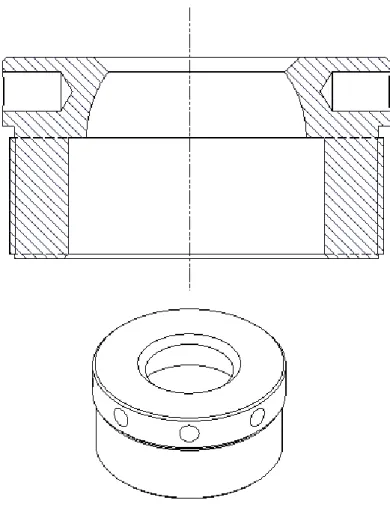
2.2.6 Biyel Vida Küresi Alt ve Üst Parçaları
Pres başlığına krank milinden aldığı eksantrik hareketi doğrusal olarak ileten biyel vidası, alttan ve üstten küresel yataklarla yataklanmıştır. Küresel yataklamanın nedeni ise açısal salınımlara izin vermesidir. Aksi takdirde zaten mekanizma çalışmayacaktır. Biyel vidasıyla yatağı arasındaki en ufak gereksiz boşluklar makinenin verimsiz çalışmasına, yüksek seslere ve makine ömründe azalmalara neden olur. Bu nedenle biyel vidasının küresi önce bir kızılla
takviye edilip daha sonra ince işlenmiş çelik bir yatakla yataklanır. Asıl önemli olan kürenin altında kalan yataktır. Çünkü baskı kuvveti direkt olarak burada sönümlenir. Küre üstünde kalan yatak ise sadece başlık ve kalıp ağırlığıyla bir basıya maruz kalacaktır ve mantıki olarak başlığın ve kalıbın ağırlığını karşılayıp biyel kolundan düşmelerini engelleyecek formda bir yapıya sahip olmalıdır. Şekil 2.16 ve Şekil 2.17‟de görüldüğü gibi küresel formdaki yataklarda projelendirilmesi gereken kesit gösterilmiştir:
Şekil 2.18. Biyel vida küresi üst yatağı
Küre alt yatağında basıya zorlanan kesit için ezilme kontrolü yapılır;
em ak kürealtyat baskı P A F P (2.62)
Küre üst parçada geometrisi itibariyle biyel vida küresini başlığa tutturmak için vida dişleri açılmıştır.Aşağı doğru oluşan ağırlık kuvvetlerini bu dişler karşılamaktadır. Bu dişlerin profil seçiminde ve hatve tayininde (2.41), (2.42), (2.43) no‟lu formüllerden yararlanabiliriz.
3. TASARIM KAPSAMINDAKİ HESAPLAMALAR
3.1 Pres Ana Elemanları
Bu bölümde (2.1) no‟lu bölümde projelendirilen C tipi 60 tonluk eksantrik presin ana elemanlarının gerçek ölçüleri hesaplanacaktır.
3.1.1 Gövde Grubu
Başlık Kızak Boyu = [en uzun plaka boyu / 2 + maksimum eksantrik değer] x 1,3 (2.1)
Başlık Kızak Boyu = (550/2+100) x 1,3 = 487,5 mm
Başka bir kabulle 10.e = 10.50 = 500 şeklinde de alınabilir. Biz ortalama 485 mm olarak alıyoruz. Yg =
i gi i A Y A . (2.2)A-A kesiti için ön kabullerle seçtiğimiz sac boy ve kalınlıklarına göre 2.2 no‟lu denklemle ağırlık merkezini buluruz:
Şekil 3.1. Gövde A-A kesiti ölçülü resmi Yg = 257mm ) 2 . 10 . 50 ( ) 2 . 40 . 295 ( ) 2 . 25 . 650 ( ) 2 . 5 . 10 . 50 ( ) 2 . 5 , 147 . 40 . 295 ( ) 2 . 325 . 25 . 650 ( 2
xg i g xg I A Y I i (2.3) 4 2 3 2 3 2 3 mm 1899222234 2 388 . 10 . 50 12 10 . 50 2 5 , 109 . 295 . 40 12 295 . 40 2 68 . 650 . 25 12 650 . 25 xg Ic I Wxg xg (2.4) 3 1 257 7389970mm 1899222234 xg
W (presin açık-ön tarafı için)
3 2 393 4832627mm
1899222234
xg
W (presin arka tarafı için)
l F
Meğ . (l: krank ekseninden tarafsız eksene olan uzaklık) (2.5)
F=60000 kg (pres anma kuvveti) . 60000kg Meğ (275+257) = 31920000 kgmm xg eğ eğ W M (2.6) 32 , 4 7389970 31920000 1 eğ
kg/mm2 (pres açık-ön tarafındaki eğilme gerilmesi)
61 , 6 4832627 31920000 2 eğ
kg/mm2 (presin arka tarafındaki eğilme gerilmesi)
A F çeki (çeki gerilmesi) (2.7) 05 , 1 ) 2 . 10 . 50 ( ) 2 . 40 . 295 ( ) 2 . 25 . 650 ( 60000 çeki
kg/mm2 (çekmeden oluşan çeki gerilmesi)
em eğ çeki topön (2.8) 24 37 , 5 32 , 4 05 , 1 top
kg/mm2 (presin açık-ön kısmına etkiyen toplam gerilme değeri) (Wellinger Gimmel – Werkstoff Tabellen Der Metalle St37-2 (DIN 1.0161) için dalgalı yükte
24 em
kg/mm2 )
Pres tasarımında önemli olan kuvvet budur. Çünkü pres gövdesini açmaya çalışan kuvvettir.
Bu durumda emniyet katsayısı 5 37 , 5
24
24 56 , 5 61 , 6 05 , 1 arka top kg/mm2
Bu değer de emniyet sınırları içindedir fakat ön kısımdaki toplam gerilme referans alınarak tasarım yapılacağından bu değer önemsenmeyecektir.
Şekil 3.3. Gövde B-B kesiti ölçülü resmi
Aynı hesaplamaları B-B kesiti için de yaparsak;
Yg =
i gi i A Y A . (2.2) Yg = 230mm ) 2 . 40 . 250 ( ) 2 . 25 . 600 ( ) 2 . 125 . 40 . 250 ( ) 2 . 300 . 25 . 600 ( 2
xg i g xg I A Y I i (2.3) 4 2 3 2 3 mm 1298166667 2 105 . 250 . 40 12 250 . 40 2 70 . 600 . 25 12 600 . 25 xg I c I Wxg xg (2.4) 3 1 230 5644203mm 1298166667 xgW (presin açık-ön tarafı için)
3 2 370 3508559mm 1298166667 xg
W (presin yere yakın kısmı için)
l F
Meğ . (l: krank ekseninden tarafsız eksene olan dik uzaklık) (2.5)
16500000 275 . 60000 eğ M kgmm xg eğ eğ W M (2.6) 9 , 2 5644203 16500000 1 eğ
kg/mm2 (pres açık-ön kısmındaki gerilme değeri)
7 , 4 3508559 16500000 2 eğ
kg/mm2 (presin yere yakın kısmındaki gerilme değeri)
Burada da presin açık kısmındaki eğilme gerilmesini referans alıp tasarım yapmalıyız. Çünkü pres gövdesini açmaya çalışan gerilme buradaki gerilmedir.
Pres gövdesine hem A-A hem de B-B etkiyen bileşke gerilmelerin de bileşkesi alınarak en kritik gerilme değeri elde edilmelidir.
A-A‟daki bileşke gerilme : 5,37 kg/mm2
B-B‟deki bileşke gerilme : 2,9 kg/mm2
Toplam bileşke gerilme : bil 5,372 2,92 6,1 kg/mm2 24 kg/mm2
Genel anlamda pres gövdesinin en kritik gerilmeye göre emniyet katsayısı 4 1 , 6 24 s tür.
Bu değer yeterli bir değerdir.
Bu hesaplamalardan çıkan sonuca göre başta tasarım için seçilen sac kalınlıkları ve yerleştirilmeleri yeterli bir dayanım göstermekte, pres gövdesi için emniyet durumunu sağlamaktadır.
3.1.2 Krank ve Angrenaj Grubu
Eksantrik değerleri 25‟er mm seçilmişti.
2 1 max
max Strok /2 e e
e (2.10)
1 2 min min Strok /2 e e e (2.11) 0 25 25 2 / 100 min e 25 1 e mm 25 2 e mm
Verilen değerler presin stroğunun 0-100 mm arası çalışması için uygundur. 30 seçilmiştir. e L10. (ampirik ön kabul) (2.12) 500 50 . 10 L mm sin sin e L (2.13) 86 , 2 sin 30 sin . 10 e e sin . F T (2.14) 30000 30 sin . 60000
T kg emniyetli olması açısından bir katsayı ile çarpılıp presin o kuvvete kadar dayanabilmesi, sınır yükleri biraz geçmesi durumunda hasar oluşmaması amaçlanır. 36000 2 , 1 . 30000 T kg
T e Mkrnkdön . (2.15) 1800000 36000 . 50 dön krnk M kgmm :
i angrenaj oranı 5 seçilmiştir.
em krnk b W M dön (2.16)
4140 (42CrMo4 ya da DIN 1.7225) malzeme için dalgalı yükte bem 30kg/mm2 olarak alınmıştır. em b W 1800000 12 .d3 W (2.17)
Ön kabul olarak krank mili en dar çapı 85 mm alınmıştır.
160778 12 85 . 3 W mm3 30 2 , 11 160778 1800000 b kg/mm2 Bu durumda 2,5 2 , 11 30
s bulunur. Bu değer emniyet
sağlanması açısından yeterlidir.
F
32 , 1 4 85 . 2 / 60000 4 . 2 / 2 2 em krnk yatak kayma d F A F kg/mm2 <30kg/mm2 elde edilir.
Kayma bakımından emniyetlidir.
em p dön krnk I G M . . max (2.19)
Krank mili boyunu ön kabul olarak l905 mm alıyoruz. (1m‟lik boy için em 1/4)
25 , 0 04 , 0 32 85 . . 10 . 1 , 8 905 . 1800000 4 3 max emniyetlidir. dişiş ang dön krnk M i M .. (2.20)
Dişli çiftinin çalışma verimini 0,7 olarak kabul ediyoruz.
514286 7 , 0 . 5 . 1800000Mang Mang kgmm
Krank milinin yataklanması bronz takviyeli çemberlerle sağlanır. Bu nedenle yatak basınçlarına göre uygun yatak boyu seçmemiz gerekecektir. Yataklanacak çap olarak 93 mm seçilmiştir. Yatak iç bronz malzemesinin (CuSn10) emniyetli basınç değeri
7 5 36 s Pem ak kg/mm2 „dir. em yatak P D L F P . (2.22)
175 7 93 . 30000 7 93 . 2 / 60000 L L L
P mm olarak seçildi. Burada yatağa gelen sadece
baskı kuvveti göz önünde bulundurulmuştur. Bunun dışında dişlilerden gelen radyal kuvvetler de dişlilerle ilgili hesaplamalar kısmında hesaba katılarak yatak basınçları kontrol edilecektir.
Angrenaj mili için de aynı işlemler uygulanır. Yalnız angrenaj milinin bir ucunda oldukça yüksek kütleli volan bulunduğundan bunu da hesaba katmak gerekecektir. Bileşke bir gerilme oluşacaktır.Bunun için öncelikle ön kabul yaparak bir volan kütlesi seçiyoruz. Ön kabulde volan kütlesini yaklaşık 230 kg kabul ediyoruz.
Şekil 3.4. Angrenaj mili
Ortalama volan genişliğini 120 mm olarak kabul edersek yukarıdaki şekilde de görüldüğü gibi tahmini olarak verilen değerlere göre yataklama boyunun soluna pnömatik kavrama ve en sola da volan oturtulacaktır. Buna göre volan ağırlık merkezinin yatak sonuna kadar olan mesafesi 182 mm olacaktır.Buna göre 182 mm den 230 kg‟lık momenti göz önünde buludurmamız gerekecektir. (Angrenaj mili malzemesi de DIN 1.7225 (42CrMo4 veya 4140) seçilmiştir) Dinamik dalgalı yüklemelerde 50
em eğ kg/mm2‟dir. xg eğ eğ W M (2.6) 182 . 230 2
em ang b W M (2.16) 30 14 , 4 12 78 . 514286 3 b kg/mm2 . Emniyetlidir.
Ön kabul olarak angrenaj milini krank mili boyuna yakın veya daha uzun alabiliriz. Angrenaj mili boyunun 1115 mm olarak kabul ediyoruz.
em p ang I G M . . max (2.19) 25 , 0 02 , 0 32 78 . . 10 . 1 , 8 1115 . 514286 4 3 max . Emniyetlidir. 2 2 . 3 b eğ top (2.21) 50 2 , 12 04 , 7 . 3 45 , 0 2 2 top
kg/mm2. Emniyetlidir. Emniyet katsayısı 4
2 , 12 50 s
olarak elde edilir ve yeterince iyi bir değerdir.
Angrenaj mili ile ilgili yatak seçimi yapmak gerekirse, göz önünde bulundurulması gereken kuvvetler sadece volan ağırlığı olabilir. Deformasyona yol açacak büyük bir kuvvet bulunmamaktadır. Fakat krank mili projelendirilmesi kısmında bahsedildiği gibi dişlilerden gelen radyal kuvvetlerle sonradan tekrar kontrol edilecektir. Angrenaj mili rulmanlı yatakla yataklanacağı için uygun model katalogdan seçilecektir.
3.1.3 Dişli Çarklar
Dişli çark boyutlandırmaya geçmeden önce birkaç kabul yapmak gerekir:
5
ve mn=7 mm olarak alınır.
Eksenler arası mesafe de gövde üzerindeki pozisyonlarına göre 400 mm olarak alınmıştır.
2 ). (z1 z2 ma a (2.23) cos n a m m (2.24) mm ma 7,03 5 cos 7 1 2 i .z z ang (2.25) 1 2 5 z. z 19 2 03 , 7 ). 5 ( 400 1 1 1 z z z
diş ve z2 95 olarak belirlenir.
a m z d1 1. (2.26) 57 , 133 03 , 7 . 19 d mm
a m z d2 2. (2.27) 85 , 667 03 , 7 . 95 2 d mm
Büyük ve pinyon dişli için;
n m m
B . (2.28)
Hassas işlenmiş dişlilerde diş genişlik sayısı m 15 olarak alınabilir.
105 7 . 15
B mm olarak elde edilir.
Bu aşamadan sonra dişlilerden kaynaklanan radyal ve eksenel kuvvetleri bulalım:
Büyük dişli için;
2 d M F krnkdön ç (2.29) 5390 2 / 85 , 667 1800000 ç F kg cos ç n F F (2.30) 5410 5 cos 5390 n F kg
.tan sin . ç n a F F F (2.31) 5 , 471 5 tan . 5390 5 sin . 5410 a F kg cos tan . ç r F F (2.32) Kavrama açısı 20 „dir. 1969 5 cos 20 tan . 5390 r F kg
Diş dibi kırılma kontrolü bakımından:
Bu hesabı yapmadan önce birkaç değer tablodan okunmalıdır. Çevre hızı 2 m/sn ve normal işçilik için Kd =1 ve 95 diş için form faktörü Kfm=2,21 seçilir.
em n ç fm d e B m F K K . . . . (2.33)
Büyük dişli çelik sac kıvrılarak imal edilmiştir. Malzemesi St60 olarak seçilmiştir. St60 için dinamik gerilme dayanımı D 0,65.K 0,65.6039kg/mm2„dir.em D/Kç Kç 1,5 ve profil kavrama oranı 1 olarak seçilmiştir. Malzeme sertliği HB=1750-1950 olarak tablodan alınmıştır. 26 5 , 1 / 39 16 105 . 1 . 7 5390 . 21 , 2 . 1 e kg/mm2 . Emniyetlidir.
em ç d a m P i i d B F K K K K K P 1 . . . . . . 2 max (2.34) E Km 0,35. (2.35) Malzeme katsayısı Km 0,35.2,1.104 85,7 kg/mm2 .tan cos 1 2 a K (2.36)
Yuvarlama noktası katsayısı 1,77
20 tan . 20 cos 1 2 a K cos K (2.37)
Diş eğim katsayısı K cos5 0,99
1
K (2.38)
Profil kavrama oranı katsayısı 1 1 1 K HB Pem 0,25. 50 / 5 , 487 1950 . 25 , 0 2 N mm Pem kg/mm 2
50 6 , 45 5 1 5 85 , 667 . 105 5390 . 1 . 1 . 99 , 0 . 77 , 1 . 7 , 85 max P kg/mm2 . Emniyetlidir.
Bütün bu hesaplamalar pinyon dişli için de yapılır.
1 d M Fç ang (2.29) 7700 2 / 57 , 133 514286 ç F kg
Normalde büyük dişli ile kuvvetlerin tepkilerinin aynı olması gerekirken kuvvet iletimindeki verimi de göz önünde bulundurarak bu kuvvete dayanabilen bir pinyon elde etmemiz gerekecektir. cos ç n F F (2.30) 7730 5 cos 7700 n F kg .tan sin . ç n a F F F (2.31) 674 5 tan . 7700 5 sin . 7730 a F kg cos tan . ç r F F (2.32)
2813 5 cos 20 tan . 7700 r F kg
Çevre hızı 10 m/sn ve normal işçilik için Kd =1,25 ve 19 diş için form faktörü Kfm=2,9 seçilir.
em n ç fm d e B m F K K . . . . (2.33)
Pinyon dişli silindirik malzemeden imal edilmiştir. Malzemesi 4140 (DIN 1.7225) olarak seçilmiştir. 4140 (DIN 1.7225) için dinamik gerilme dayanımı
60 90 . 65 , 0 . 65 , 0 K D
kg/mm2„dir. em D/Kç Kç 1,5 ve profil kavrama oranı 1
olarak seçilmiştir. Malzeme sertliği HB=2170 olarak tablodan alınmıştır.
40 5 , 1 / 60 38 105 . 1 . 7 7700 . 9 , 2 . 25 , 1 e kg/mm2 . Emniyetlidir.
Diş ezilme kontrolü bakımından;
em ç d a m P i i d B F K K K K K P 1 . . . . . . 2 max (2.34) HB Pem 0,25. 5 , 55 / 5 , 487 2170 . 25 , 0 2 N mm Pem kg/mm 2 5 , 55 53 5 1 5 85 , 667 . 105 7700 . 1 . 1 . 99 , 0 . 77 , 1 . 7 , 85 max P kg/mm2 . Emniyetlidir.
Dişli çiftinden kaynaklanan kuvvetlerin ilavesiyle rulman kontrolü yapmamız gerekecektir. Pinyon dişlinin yataklarına gelen eksenel ve radyal kuvvetleri inceleyelim:
Rulman seçiminde kullanılan basit formüllerden yola çıkarak,
24 , 0 2813 674 e F F r a
elde edilir. Angrenaj milinin pinyon tarafındaki yatağı tek bilyalı sabit rulmanla yataklamak istiyoruz. Bu nedenle katalogdan tek sıra bilyalı sabit rulmanlar kısmında e=0,24 için X ve Y değerleri okunmuştur. X=0,56 ve Y=1,8
a r
o X F Y F
F . . =0,56.2813+1,8.674=2789 kg
İşletme saati açısından tablo değerlerine göre seçilen rulmanın doğru olup olmadığını kontrol edelim. Bunun için bir çalışma saati kabul etmemiz gerekir. İşletme devri 250 d/dak olarak Lh=1600 saat seçilmiştir.Buna karşılık gelen
F C
değeri de 2.88 olarak tablodan okunur. Uygun olup olmadığı kontrol edilir.
(Bilyalı rulmanlarda p=3 alınır).
1592 250 . 60 88 , 2 10 1600 . 60 ) ( 10 6 3 6 n F C L p
h elde edilmiştir. Buradan
8032 88 , 2 . 2789 88 , 2 . F C
Bu da seçilen rulmanın uygun olduğunu gösterir. Seçilen rulmanın teknik olarak kodu : ORS Rulman kataloğundan 6215 „tir.
Angrenaj milinin diğer yatağı volan ağırlığını taşıyacağı için açısal oynamalara biraz da olsa izin vermesi bakımından makaralı oynak rulman kullanılacaktır. Aynı firmanın makaralı oynak rulman kataloğundan 222 16C kodlu rulman seçilir.
dönüp bir sorun olup olmadığını kontrol etmemiz gerekecektir. em yatak P D L F P . (2.22) 175 7 93 . 30000 7 93 . 2 / 60000 L L L
P mm seçilmişti. Ama yeni durumda radyal
kuvvetleri de eklememiz gerekir:
175 7 93 . 31969 7 93 . 1969 2 / 60000 L L L P mm bu durumda da uygundur
değiştirmeye gerek yoktur.
Bir de krank mili dişli bağlanan uçtaki eğilme gerilmesinin hasara yol açıp açmayacağına bakalım: xg eğ eğ W M (2.6) 50 55 , 1 16 85 . 95 . 1969 . 3 krnk r eğ W l F kg/mm2 . Emniyetlidir.
Bunun dışında eksenel kuvvetlere karşı ekstra bir önlem alınmamış bu kuvvetler şekil bağlı olarak, faturalarla tolere edilmiştir. Zaten helis açısı oldukça düşük seçilerek bu kuvvetler minimize edilmişti.
3.1.4 Biyel Grubu
öncelikle küre yüzey basıncına göre emniyetli olup olmadığını kontrol edelim: em küre P d F P 4 . ' 2 (2.39)
Buradaki açısı dişli kısmındaki ile karıştırılmamalıdır. Bu açı biyel kolunun tam güç pozisyonunda düşey eksenle yaptığı açıdır ve değeri
86 , 2 olarak bulunmuştu. cos ' F F (2.40) 60075 86 , 2 cos 60000 ' F kg‟dır.
Kürenin çapını ön kabulle dküre 95mm seçiyoruz. 4140 (DIN 1.7225) malzeme için yüzey
emniyet basıncı 14 5 70 s Pem ak kg/mm2 „dir. 14 46 , 8 4 95 . 60075 2 P kg/mm2 . Emniyetlidir.
Biyel vidasına açılacak dişlerin kontrolü için öncelikle biyel kolundaki ezilme kontrol edilir; (Biyel koluna ve vidasına Whitworth vida açılması uygun görülmüştür)
: 2
d Dişlerin ortalama çapıdır. :t Diş kesit yüksekliğidir. (Alan bulmada yardımcı olmaktadır.)
em P t d z F P . . . ' 2 (2.41)
Şekil 3.5. Biyel vida-kol bağlantısı kesit resmi
2 P t
Biyel vidası diş üstü çapını ön kabul olarak d 75 mm seçiyoruz. Buna göre 353
, 70 2
d mm, d3 65,706mm ve t h7,257mm değerleri tablodan okunur. Biyel kolu malzemesi GGG42 olarak alınmıştır 8,5
5 42 s P Ak em kg/mm2 „dir. 5 5 , 8 257 , 7 . 353 , 70 . . 60075 z z P
diş elde edilir. Buradan diş açılması gereken vida boyu
73 257 , 7 . 2 . 5 . zP L mm çıkar.
Strok değişimlerinde de biyel vidası hareket edip ileri geri oynama yapacağından 100 mm (eksantrikliğin iki katı) daha vida açılmalıdır. Böylelikle toplam vida açılan boy
173 100 73
L mm veya daha fazla olmalıdır. Tasarımın yaptığımız preste diş açılan vida boyu 230 mm olarak seçilmiştir.
Vida diş dibinin kesilme kontrolü için; em t d z F . . . ' 3 (2.42) 30 257 , 7 . 706 , 65 . . 60075 z kg/mm 2
. Bu gerilmeyi karşılayabilecek bir diş sayısı da buradan elde edilecek ve en büyük değer kullanılacaktır. Buna göre z 2 çıkar .Biz daha önceki değeri koruyup onunla tasarıma devam ederiz.
Vida diş dibinin ezilme kontrolü için;
4 . ' 2 3 d F (2.43) 50 18 4 706 , 65 . 60075 2 kg/mm2 . Emniyetlidir.
Biyel kolunun kesit alanına gelen basınca göre de incelersek;
4 . ' 2 .kolu b d F P (2.44)
Şekil 3.6. Biyel kolu en zayıf kesit alanı
Ön kabullerle Şekil 3.5‟teki ölçüleri seçtik.
42 25 , 13 4 ) 65 100 .( 60075 2 2 ak P
. Emniyetlidir. Emniyet katsayısı
5 , 3 25 , 13 / 42 s ‟tir. 3.1.5 Başlık Grubu koç A F P (2.45)
Ön kabullerle yapılan bir tasarımda elde edilen başlık basınç alanı 53584 mm2 çıkmıştır.Başlık malzemesi olarak da GGG60 seçersek 12
5 60 s P ak em kg/mm2 Buna göre bir inceleme yaparsak;
12 12 , 1 53584 60000
P kg/mm2 . Emniyetlidir. Emniyet katsayısı s12/1,1211‟dir.
3.1.6 Volan Grubu
Volanın geometrisine bağlı olarak belirli hızda kazanacağı momenti hesaplamamız gerekiyor.
ang volan M M (2.46) 514286 ang volan M M kgmm volan M A . . 2 2 1 (2.47) 30 .n (2.48)
Preste kullanılacak motor kasnağı 135 mm olarak seçilmiştir. Volan çapı da ön kabulle 750
mm olarak alınmıştır.Buna bağlı olarak dakikada ortalama 1460 devirle dönen elektrik motoruyla tahrik olan kasnak kayışlarla volanı 263
135 / 750 1460 n d/dak. ile döndürür. 2 2 ) / ( 25 , 756 5 , 27 30 263 . dk rad
36 , 1 25 , 756 . . 2 1 29 , 514 514286kgmm kgm kgms2 g L D . 32 . . . 4 (2.49)
Dökme demirden imal edilen volan için 8000kg/mm3‟tür.
Şekil 3.7. Volan ölçülü resmi
alırız. 95 , 1 81 , 9 . 32 8000 . 1 , 0 ) 52 , 0 75 , 0 ( 4 4 1 kgms2 18 , 0 81 , 9 . 32 8000 . 03 , 0 ) 22 , 0 52 , 0 ( 4 4 2 kgms2 02 , 0 81 , 9 . 32 8000 . 114 , 0 ) 131 , 0 22 , 0 ( 4 4 3 kgms2 15 , 2 02 , 0 18 , 0 95 , 1 top
1,36kgms2 . Bu sonuç volanın yeterli ölçülerde olduğunu gösterir.
3.2 Pres Yardımcı Elemanları
3.2.1 Mekanik Sigorta
Sigorta malzemesi olarak St70 seçilmiştir. em 37olarak alnımştır.
37 5 , 32 ) 8 14 .( 98 . 60000
. Pres kuvvetinin biraz üstündeki zorlamalara da izin veren bu ölçülerdeki sigorta yaklaşık olarak 60-65 tonluk kuvvete dayanabilir. Daha yüksek kuvvetlerde kesilerek presin hasar görmesini engeller.
3.2.2 Eksantrik Kavrama
Kavrama malzemesi olarak GGG60 seçilmiştir. Emniyetli çekme ve kayma gerilmeleri 24 e kg/mm2 ,e 14kg/mm2 olarak alınmıştır. em diş ort dön krnk A r M . 1 (2.51)
14 6 , 0 4 ) 138 248 .( 1 . 2 138 248 1800000 2 2 kg/mm2 . Emniyetlidir. 3.2.3 Kamalar
Önce angrenaj mili üzerindeki kamaları ölçülendirelim: Volan ile angrenaj mili arasındaki kamaya bakalım.
Kama malzemesi olarak St50 seçilmiştir. Volan malzemesi daha yumuşak olduğu için volan malzemesinin ezilmemesi için kama boyu kontrolü yapılır. DDD50 için emniyetli yüzey
basıncı 10 5 50 s Pem K kg/mm2.
Şekil 3.10. Angrenaj mili kama montaj çapları
kama ang ç r M F (2.52) 13714 2 / 75 514286 ç F kg em ç P n l t F P . . 1 (2.53)
Gerekli tablolardan 75mm çap için uygun kama genişlik ve yükseklik değeri alınır. Buna göre mile gömülü kısım t1 9mm, göbeğe gömülü kısım t2 5,4mm, genişlik b=22 mm, yükseklik h=14 mm olarak alınır.(n: kama sayısı belirtmektedir.)
76 10 2 . . 9 13714 l l
P mm. Biz 110 mm boyundaki kamalardan 2 adet kullanıyoruz.
Kama kesilmesine karşı (kama için 4,5 4 180 s ak em kg/mm2 ); em ç n l b F . . (2.54) 3 84 , 2 2 . 110 . 22 13714 kg/mm2 . Emniyetlidir.
Mil malzemesi göbek malzemesinden daha sert olduğu için göbeğe göre yapılan hesaplamalar yeterlidir.
Aynı şekilde angrenaj milinin diğer ucunda bulunan pinyon dişli için de kama gerekmektedir. Pinyon dişlinin genişliği önceden elde edildiği için kullanacağımız kama boyu sınırlı olacaktır. Eldeki verilerin emniyetli olup olmadığını kontrol edelim:
Pinyon malzemesi ile angrenaj mili malzemesi aynı olduğundan biri için yapılan ezilme kontrolü yeterli olacaktır. 4140 (DIN 1.7225 veya 42CrMo4) için
5 , 23 3 70 s P ak em kg/mm2 seçildi. kama ang ç r M F (2.52)
15824 2 / 65 514286 ç F kg em ç P n l t F P . . 1 (2.53)
Gerekli tablolardan 65mm çap için uygun kama genişlik ve yükseklik değeri alınır. Buna göre mile gömülü kısım t1 7,5mm, göbeğe gömülü kısım t2 4,9mm, genişlik b=20 mm, yükseklik h=12 mm olarak alınır. Ayrıca pinyon dişli genişliği Bl 105mm olarak alınmıştır. 5 , 23 20 1 . 105 . 5 , 7 15824 P kg/mm2. Emniyetlidir.
Kama kesilmesine karşı (kama için 4,5 4 180 s ak em kg/mm2 ); em ç n l b F . . (2.54) 5 , 4 77 , 3 2 . 105 . 20 15824 kg/mm2 . Emniyetlidir.
Krank mili üzerindeki büyük dişli için de aynı işlemleri yapalım:
kama dön krnk ç r M F (2.55)
Şekil 3.11. Krank mili büyük dişli bağlantı çap ölçüleri 42353 2 / 85 1800000 ç F kg
Büyük dişli malzemesi St60 için 15,5 5 , 2 38 s P ak em kg/mm2 em ç P n l t F P . . 1 (2.53)
Gerekli tablolardan 85mm çap için uygun kama değerleri olarak mile gömülü kısım 9
1
t mm, göbeğe gömülü kısım t2 6,4mm, genişlik b=25 mm, yükseklik h=14 mm olarak alınır 151 5 , 15 2 . . 9 42353 l l
P Buna göre kama boyu standartlara göre 170 mm alınır.
Kama kesilmesine karşı (kama için 7,2 5 , 2 180 s ak em kg/mm2 ); em ç n l b F . . (2.54)
2 , 7 9 , 4 2 . 170 . 25 42353 kg/mm2 .Emniyetlidir. 3.2.4 Plaka
Şekil 3.12. Pres plakası kesit görüntüsü
Plaka için uzunluk ve genişlik değerleri standartlardan gelen değerlerdir (550 x 710 mm2 ). Bunu dışında kalınlığı ve plaka üzerindeki boşluğun yapılacak işe göre uygun olması gerekir.
Şekil 3.13. Plaka üst ve genişlik kesit görünüşü Yg =
i gi i A Y A . (2.2) Yg = 22 2 ). 50 . 180 30 . 155 ( ) 2 . 25 . 50 . 180 2 . 15 . 30 . 155 ( mm ( Şekil 2.15‟te “b” olarak ifade edilen plaka üstünden ağırlık merkezine olan mesafe )
2
xg i g xg I A Y I i (2.3) 180.50.33 2 12 50 . 180 2 7 . 30 . 155 12 30 . 155 2 3 2 3 xg I 24505200 mm4 h I Wplaka plaka (2.58) 1113873 22 24505200 xg W mm3 4 .a F M baskı maks plaka (2.56)a : Plakayı mesnetleyen plakalar arası mesafe olmak üzere 390 mm olarak alınmıştır.
5850000 2 390 2 . 60000 eğ M kgmm em plaka maks plaka eğ W M (2.57) em eğ 5,25 1113873 5850000
Plaka malzemesi St37 için 7
5 34 s ak em kg/mm2 „dir ve 5,257kg/mm2 olduğundan emniyetlidir. Seçilen ölçüler uygundur.
Mesnetler arasında kalan plaka alanının kesilme kontrolünü yaparsak; em mesnet baskı kesme kesit A F (2.60)
Dinamik şartlarda St37 için 2,75 4 110 s ak em kg/mm2 75 , 2 29 , 0 550 . 390 60000 kesme kg/mm2 . Emniyetlidir.
Yüzey ezilmesi açısından bakılırsa;
em plaka baskı P A F P (2.61)
Dinamik şartlarda St37 için 6
4 240 s Pem ak kg/mm2 6 015 , 0 710 . 550 60000 P kg/mm2 . Emniyetlidir. 3.2.5 Dengeleyici Pistonlar
Tasarımını yaptığımız preste pnömatik silindir bulunmamaktadır. Pnömatik silindir bulunan modellerde üretici kataloglarında silindirin maksimum taşıyabileceği ağırlık verilir. Bu değere göre başlık ağırlığı için uygun bir model seçilip bir ucu sabit duran gövde parçasına diğer ucu da başlığa gelecek şekilde monte edilir.
4140 (DIN 1.7225) malzeme için yüzey emniyet basıncı 14 5 70 s P ak em kg/mm2 „dir. Biyel küresinin yarısının bu yatakla çevreleneceğini kabul edersek;
em ak kürealtyat baskı P A F P (2.62) 14 1 , 1 2 95 . . 4 60000 2 . . 4 60000 2 2 d P kg/mm2 . Emniyetlidir.
14 3 , 8 4 96 . 60000 2 P kg/mm2 . Emniyetlidir.
Biyel vida küresini üstten yataklayan parça yine alt parça gibi küresel parçanın rahatlıkla salınım yapmasına izin veren bir geometriye sahiptir. Etrafında dişler açılarak şekil bağlı engellemeyle başlığı aşağıya inişlerde taşıma görevi tamamen bu parça üzerindedir. Biyel vidası üzerinde açılması gereken diş profilini önceki bölümlerde incelemiştik. Yine aynı formda bir diş açacağız. Burada ekstra bir hesaplama yapmamız gerekmeyecektir. Biyel kolundaki diş sayısı ve maruz kaldığı kuvvete bir oranla burada bir seçim yapacağız. Buna göre 3.1.4 no‟lu bölümde bulunduğu gibi 60075 kg ı 5 diş taşıyabilmekteydi. Küre üst parçasının maruz kalacağı maksimum kuvvet ise başlık ağırlığı yani 150-200kg arasındadır. Buna göre bir oran kurup en az diş miktarı elde edebiliriz. Bizim tasarımını yaptığımız preste aşağıdaki gibi bir tasarım yapılmıştır.
4. PRES PARÇALARININ BİLGİSAYAR ORTAMINDA TASARIMI
Bu kısma kadar yapılan hesaplamalarla birtakım ölçüler elde edildi. Bu ölçüler ışığında pres parçaları bilgisayar ortamında çizilebilir ve montaj açısından birbiriyle çalışacak elemanların eksik olan ölçüleri saptanır.
Burada parçalara ait ölçeksiz ve ölçüsüz resimlere yer verilecektir. Ekler kısmında parçalara ait teknik resimler yer alacaktır.
4.1 Pres Ana Elemanları
4.1.2 Krank ve Angrenaj Grubu
Şekil 4.2. Krank ve angrenaj grubunun bilgisayar ortamında tasarımı
4.1.3 Dişli Çarklar
Şekil 4.4. Pinyon dişlinin bilgisayar ortamında tasarımı
4.1.5 Başlık Grubu
Şekil 4.6. Başlığın bilgisayar ortamında tasarımı
4.1.6 Volan Grubu
4.2 Pres Yardımcı Elemanları
4.2.1 Mekanik Sigorta
Şekil 4.8. Mekanik sigortanın bilgisayar ortamında tasarımı
4.2.2 Eksantrik Kavrama
4.2.3 Plaka
Şekil 4.10. Plakanın bilgisayar ortamında tasarımı
4.2.4 Biyel Vida Küresi Alt ve Üst Parçaları
Şekil 4.12. Biyel vida küresi üst parçasının bilgisayar ortamında tasarımı
5. PRES PARÇALARININ SONLU ELEMANLAR YÖNTEMİYLE ANALİZİ
5.1 Pres Ana Elemanları
5.1.1 Gövde Grubu
Presi oluşturan ana ve yardımcı parçaları bu kısma kadar bilinen yöntemlerle basite indirgeyerek hesapladık. Fakat basit indirgeme işlemi bütün olarak presin nasıl etkileneceği hakkında bize tam bir fikir vermeyebilir. Bu nedenle parçaların bütünüyle momentlerden ve basınç kuvvetlerinden nasıl etkilendiğini anlamamız için sonlu elemanlar metodunu kullanacağız. Analiz yaparken T-Flex Parametric CAD adlı programdan yararlanacağız.
5.2 Pres Gövdesini Analizi
Mumak Makine San. ve Tic. A.Ş‟de üç boyutlu tasarım için Autodesk Inventor programı kullanılmaktadır .T-Flex‟te analiz yapabilmemiz için önce her iki programın da yüksek verimle tanıyabildiği STEP formatında dönüşümler yapılır.
Şekil 5.1. Tflex programında gövdenin analize uygun hale getirilmesi
Analiz yapabilmemiz için program bizden birkaç parametre istemektedir. Öncelikle presin sabitleneceği ve kuvvetlerin uygulanacağı yüzeyleri, ardından imal edildiği malzemeyi seçmemiz gerekecektir.
Bu parametreler girildikten sonra program, pres gövdesini binlerce parçaya bölmek için “mesh” işlemi uygular.