SOFTWARE TESTING UNTUK
MOTION CAPTURE YANG
DITERAPKAN PADA TARI
PENDET
By Nita Dwi Wulan Sari (2207100512)
ABSTRACT
The development and implementation of computer and information technology has been extended to various fields. Starting from the implementation in the field of automatic settings, the field of
telecommunications, education, business, internet, and also in the field of entertainment.
In real life - the day we often difficult to capture a movement. With the existence of motion capture under development we will be able to retrieve data from a movement which we will use as an ingredient in making animated films. In some countries that have advanced the data obtained from motion capture can be applied in the field of medicine, entertainment, sports, and military With software that has been made that we will aplication McGegas or apply them to movement a Tari Pendet. So that we can create animations from motion capture data we have first.
1. Pendahuluan
1.1
MOTION CAPTURE
Motion capture atau Mocap adalah teknik merekam gerakan secara digital untuk mendapatkan informasi urutan gerakan yang berguna bagi keperluan iptek, kesehatan, olahraga maupun enterteinmen. Motion capture juga dapat diartikan sebagai proses rekam gerakan dan mengkonversi gerakan kedalam bentuk model gerakan digital. proses ini diakukan untuk merekam gerakan manusia dan memanfaatkan file digital yang dihasilkan untuk menggerakkan model karakter yang sudah dibuat didalam aplikasi animasi 3D.
Penerapan motion capture pada bidang enterteinmen ini banyak digunakan untuk pembuatan film animasi yang sedang banyak dikembangkan di Negara – Negara maju. Penerapan motion capture di bidang enterteinmen ini sangatlah membutuhkan banyak biaya.
Kelebihan dari Motion capture dibandingkan dengan animasi komputer tradisional model 3D antara lain :
• Menghemat waktu, hasilnya dapat diperoleh secara real time. Waktu untuk produksi jadi lebih pendek.
• Saving cost, Dalam aplikasi enterteinment dapat mengurangi biaya dalam hal keyframe-based animation.
• Capture gambar yang dihasilkan lebih bagus dan halus.
Kekurangan dari Motion Capture antara lain : • Membutuhkan hardware dan software
khusus untuk memproses data
• Sofware yang digunakan mahal bagi produksi kecil .
1.2
Basic Proses Motion Capture
Data Motion Capture dihasillkan dari system Ascension Motion Star dan dimasukkan secara langsung dalam model 3D dan animasi program ,softimage pada saat capture time. Data sample yang digunakan sampai dengan 144Hz. High sampling rate digunakan untuk gerakan yang cepet seperti gerakan olahraga dan tari. Slow sampling rate sering menimbulkan masalah pada fase inverse kinematika,terjadi pada saat berkurangnya frametoframe coherence. Actor atau objek menggunakan 13 -18 sensor /marker. Lokasi untuk sensor yang digunakan adalah sebagai berikut :
Metode yang digunakan untuk motion capture ini adalah didesign untuk mendapatkan keuntungan antara lain :
1. menangkap gerakan secara real time dari sensor yang telah ada yang memungkinkan untuk initial kalibrasi dan periodic kalibrasi ulang dari dari sensor offset ke virtual skeleton.
2. perangkat animasi pada softimage digunakan untuk mengontrol data yang akan diambil
3. Kemampuan analisis statistic dan inverse kinematics untuk membuang error dan data yang tidak digunakan dan disesuaikan dengan hierarchical rigid body dengan mengurangi set dari DOF dengan data. Proses ini banyak digunakan diberbagai bidang seperti militer, entertainment, olahraga maupun aplikasi medikal. Dalam bidang perfilman sendiri
proses ini diakukan untuk merekam gerakan sang aktor dan memanfaatkan file digital yang dihasilkan untuk menggerakkan model karakter yang sudah dibuat didalam aplikasi animasi 3D. Proses ini juga mampu merekam gerakan wajah, jari tangan dan ekspresi dengan halus tergantung dari kelengkapan perangkat capturenya. Motion Capture dapat dibagi menjadi dua yaitu Optical Motion Capture dan
Non-optical Motion Capture.
1.1.1. Sistem Optik (Optical System)
Ada beberapa metode yang berbeda yang digunakan untuk menangkap gerakan dari aktor. Satu yang umum digunakan adalah Sistem Optik yang memanfaatkan data yang ditangkap oleh kamera dan triangulates posisi objek dalam ruang 3D. Akuisisi data secara tradisional dilakukan dengan menggunakan penanda khusus yang dipasangkan pada aktor, namun sistem yang lebih baru mampu menghasilkan data yang lebih akurat dimana pelacakan permukaan diidentifikasi secara dinamis untuk setiap subyek tertentu. Sistem penangkap gerak berbasis optik memiliki dua macam, yaitu Markered
dan Markerless.
1.1.1.1. Sistem Optik Pasif
Menggunakan spidol yang telah dilapisi dengan bahan retro reflektif dan memantulkan cahaya ke kamera. Kamera menggunakan inframerah (IR) LED terpasang di sekitar lensa kamera, mereka juga memiliki IR pass filter di lensa. Penyesuaian
thresholding kamera memungkinkan untuk membedakan kain dan kulit, dan hanya reflektif yang cerah yang akan disampel.
1.1.1.2. Sistem Optik Aktif
Untuk merefleksikan cahaya kembali ke kamera yang dihasilkan oleh sumber eksternal, marker aktif dengan sendirinya akan memancarkan sinar inframerah. Dengan marker aktif, jarak dapat lebih besar selama diambil.
1.1.1.3. Optik Tanpa Marker (Markerless Optic)
Ada beberapa metode untuk melacak objek tanpa bantuan marker. Sistem optik ini menggunakan beberapa kamera. Aktor tidak perlu memakai peralatan apapun. Sistem ini disebut Computer Vision dan memiliki kemampuan untuk mendapatkan informasi dari gambar. Sistem menganalisis gambar yang diperoleh dari urutan video, atau untuk dilihat contoh dari beberapa kamera menggunakan algoritma matematika yang canggih. Algoritma ini kemudian mensegmentasi gambar dan bekerja dalam proses di mana informasi tersebut dapat diekstraksi. Visi komputer kedokteran adalah bidang yang dapat
mengambil manfaat dari teknik ini. Para dokter dapat mendeteksi tumor atau perubahan dalam tubuh dengan mengekstraksi informasi dari gambar. Hal ini dapat mengukur dimensi dari organ dan aliran darah.
1.1.2. Sistem Tanpa Optik (Non-Optical System)
Berbagai jenis metode yang tidak menggunakan kamera adalah sistem non-optik yang juga sangat umum. Yang paling digunakan metode non-optik adalah sistem inersia, mechanical motion, dan magnetic motion capture.
1.1.2.1. Magnetic Motion Capture
Magnetic systems meghitung posisi berdasarkan flux magnetik relatif dari tiga coil orthogonal pada pemancar dan penerimanya. Intensitas relatif dari tegangan atau dari tiga coil memungkinkan sistemntk menghitung jarak dan orientasi dengan memetakan pelacakan volume. JZZ Technologies, Inc. menggunakan perangkat keras ini dalam program analisa E-Factor Motion Capture. Output dari sensor ini sebesar 6DOF, yang berguna memberikan hasil yang diperoleh dengan dua per tiga jumlah tanda yang diperlukan dalam sistem optik; satu pada lengan atas dan satu dibawah siku lengan untuk posisi dan sudut. Tanda-tanda yang tidak termasuk dalam non metallic object tapi rentan terhadap gangguan listrik dan magnetis dari logam-logam di sekitarnya, seperti rebar dan kabel, dimana mempengaruhi medan elektromagnetik, dan peralatan elektronik lainnya, seperti monitor, lampu, kabel, dan komputer.
1.1.2.2. Mechanical Motion Capture
Sistem Mechanical Motion Capture secara langsung melacak persendian gerak tubuh manusia dan sering disebut sebagai sistem motion capture exo-skeleton, berdasar pada sensor yang dipasangkan pada tubuh. Seorang objek gerak dipasangkan sebuah kerangka yang menyerupai kerangka tubuh manusia sehingga saat objek bergerak, benda itupun ikut bergerak, sambil mengukur gerakan objek.
1.1. Kalibrasi Kamera
Sebelum dapat melakukan proses rekonstruksi 3D, kalibrasi kamera perlu dilakukan untuk mendapatkan beberapa parameter dari kamera digital yang digunakan. Parameter ini meliputi matriks intrinsik dan ekstrinsik yang nantinya digunakan untuk melakukan perhitungan, sehingga dapat ditentukan letak dari suatu benda dalam ruang 3 dimensi.
Parameter dari matriks intrinsik ini terdiri dari 4 unsur yaitu :
A. Nilai fokus kamera, yaitu jarak antara lensa kamera dengan bidang gambar.
B. Titik pusat proyeksi, yaitu lokasi titik tengah gambar dalam pixel koordinat.
C. Ukuran pixel efektif.
D. Koefisien distorsi, yaitu koefisien tingkat kelengkungan lensa meliputi radial dan tangensial distorsi.
Sedangkan parameter ekstrinsik ini terdiri dari dua buah matriks, yaitu matriks translasi dan matriks rotasi. Parameter ekstrinsik ini menggambarkan orientasi posisi dari kamera terhadap sistem koordinat sebenarnya dalam ruang 3 dimensi atau world coordinate. Untuk melakukan proses kalibrasi kamera digunakan papan catur (chessboard pattern) dengan ukuran sisi perkotaknya 1 atau 3 cm seperti pada Gambar 2.1.
Gambar 2.5 Chessboard Pattern
Langkah pertama yang harus diambil sebelum melakukan kalibrasi kamera adalah mengambil beberapa gambar dari chessboard pattern, kemudian melakukan pencarian titik-titik chessboard
pattern pada gambar. Dengan mengetahui letak
titik-titik pada world coordinate dan pixel coordinate maka dapat dicari matriks yang menghubungkan keduanya. Matriks inilah yang disebut sebagai matriks intrinsik dan ekstrinsik. Metode untuk mencari matriks ini menggunakan metode dari Zhang [8] yang telah diimplementasikan dalam fungsi-fungsi pada OpenCV.
Gambar 2.6. Kalibrasi Kamera
1.1.1. Parameter Instrinsik Kamera
Setelah dilakukan proses kalibrasi maka didapatkan matriks intrinsik dan ektrinsik dari kamera. Matriks intrinsik (W) terdiri atas fokus kamera,titik tengah proyeksi atau principal point, ukuran pixel efektif dan koefisien distorsi radial dan tangensial. Matriks intrinsik adalah matriks yang menyatakan geometri dari kamera itu sendiri.
Wint = (1) K = [k1 k2 p1 p2] (2) Keterangan: fx, fy = fokus kamera Cx, Cy = titik tengah k1, k2 = distorsi radial p1, p2 = distorsi tangensial
1.1.2. Parameter Ekstrinsik Kamera
Selain matriks intrinsik, kalibrasi kamera juga menghasilkan matriks ekstrinsik yang merupakan orientasi posisi dari kamera terhadap
world coordinate. Matriks ekstrinsik ini terdiri atas
matriks rotasi (R) dan matriks translasi (T).
Matriks rotasi sebenarnya adalah gabungan dari rotasi terhadap sumbu X, Y dan Z yang masing-masing berotasi dengan sudut (ψ,θ,φ).
1.1.3. Parameter Sistem Kamera Nyata
Kualitas dari suatu gambar diperoleh dari sistem akuisisi nyata tergantung juga pada banyak faktor lain. Hal ini berhubungan dengan fenomena fisik dan teknologi yang mempengaruhi proses akuisisi.
A. Keterbatasan dinamika sistem
Unsur foto-transduser dasar dalam digital kamera modern mengkonversi jumlah foton yang terkumpul selama interval waktu tertentu (interval integrasi perangkat, analog dengan waktu bukaan dalam kamera film) dalam setiap pixel dalam array sensor menjadi tegangan. Sementara tegangan ini berbanding lurus dengan intensitas fluks foton masukan yang terdapat pada piksel tertentu, sirkuit konverter analog-to-digital berikut adalah terbatas pada jumlah terbatas bit presisi yang mewakili tegangan masuk. Oleh karena itu, dalam rangka memperluas jangkauan sinyal input yang diijinkan sirkuit membatasi secara nonlinier diperkenalkan sebelum digitalisasi. Satu limiter tersebut adalah rangkaian pra-lutut yang karakteristik sirkuit menyebabkan tingkat kejenuhan kecil untuk nilai
yang lebih tinggi dari sinyal masukan. Akibatnya, rentang input sistem meningkat tetapi dengan biaya yang sedikit nonlinier.
B. Resolusi dari elemen CCD dan aliasing
Sesuai perjanjian dengan teori sampling, untuk menghindari aliasing, perangkat mengubah sinyal kontinyu menjadi representasi diskrit harus memenuhi kriteria Nyquist sampling (yaitu frekuensi sampling harus paling sedikit dua kali nilai komponen frekuensi tertinggi sinyal sampel). Dalam sistem pencitraan sebenarnya ada dua faktor yang dapat membantu untuk meringankan masalah aliasing. Yang pertama terdiri dari aplikasi low-pass filter di sirkuit input. Yang kedua adalah low-pass filter efek alami karena lensa itu sendiri, nyata sebagai fungsi penyebaran titik (PSF) atau fungsi transfer modulasi (MTF) yang secara alamiah membatasi frekuensi spasial tinggi saat ini sebelum digitalisasi [3, 4].
C. Noise
Setiap saluran akuisisi gambar berisi banyak sumber noise. Dalam perangkat CCD ada sumber kebisingan dalam bentuk cross-talk. Ini adalah fenomena kebocoran muatan antara fotoreseptor tetangga dalam setiap baris dari CCD. Sumber kebisingan lainnya berasal dari filter dan konverter analog-ke-digital. Yang terakhir ini menambahkan noise kuantisasi yang merupakan hasil dari bit stream yang mewakili sinyal analog.
D. Saturasi sinyal
Fenomena saturasi sinyal menghasilkan level sinyal yang berlebihan yang diterapkan pada masukan dari saluran akuisisi. Seperti sebuah sinyal nonlinear dilemahkan dan tidak dapat secara akurat dikonversi oleh A / C konverter karena jangkauan terbatas dinamis. Dimana ada adegan pencahayaan tidak cukup, karena dapat disebabkan oleh bayang-bayang, sinyal gambar "bottom-out" tidak menyediakan informasi visual yang digunakan untuk menghitung stereo yang cocok.
E. Efek Blooming.
Blooming disebabkan oleh muatan berlebihan yang muncul di beberapa wilayah di perangkat CCD (charge-coupled device). Akibatnya, beberapa bagian dari charge. ini menyebar ke sel CCD tetangga menyebabkan distorsi yang terlihat. Fenomena ini biasanya disebabkan oleh pantulan cahaya yang masuk lensa kamera.
F. Scene kondisi pencahayaan.
Ada berbagai sumber cahaya yang dapat digunakan untuk menerangi sebuah adegan dan model fotometrik berbeda yang berlaku. Setiap titik dari permukaan diterangi dari setiap arah sebagai cahaya yang sama. Model ini merupakan pendekatan yang masuk akal untuk banyak situasi nyata. terutama jika kita hanya mempertimbangkan adegan yang
terdiri dari objek matt dan opak. Dalam kasus nonuniformity sistem stereoskopik dalam adegan pencahayaan secara potensial dapat menyebabkan peningkatan kecocokan palsu. Hal ini terjadi jika metode stereo tidak berusaha untuk mengimbangi ketidaksetaraan lokal dalam iluminasi rata-rata dari gambar stereo-pair.
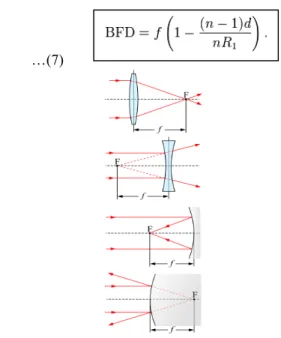
1.2.4. Focal Length
Panjang fokus dari sistem optik adalah ukuran dari seberapa kuat sistem menyatu (fokus) atau menyimpang (defokus) cahaya. Sebuah sistem dengan focal length lebih pendek memiliki kekuatan optik yang lebih besar dari satu dengan focal length panjang, artinya, sinar lebih kuat, membuat sebuah fokus dalam jarak pendek. [9]
A. Front Focal Length (FFL) atau Front Focal
Distance (FFD) adalah jarak dari titik fokus
depan sistem ke simpul permukaan optik pertama.
…(6)
B. Back Focal Length (BFL) atau Back Focal
Distance (BPD) adalah jarak dari titik dari
permukaan terakhir dari sistem optik ke titik fokus belakang.
…(7)
Gambar 2.7 Focal Length.
1.2. Software Testing
Software pengujian merupakan investigasi dilakukan untuk memberikan stakeholder dengan informasi tentang kualitas produk atau jasa sedang
diuji. Software pengujian juga memberikan pandangan, tujuan independen dari perangkat lunak untuk memungkinkan bisnis untuk menghargai dan memahami risiko pada implementasi perangkat lunak. teknik uji meliputi, tetapi tidak terbatas pada, proses eksekusi sebuah program atau aplikasi dengan tujuan untuk menemukan bug perangkat lunak. Software pengujian juga dapat dinyatakan sebagai proses untuk memvalidasi dan memverifikasi bahwa program software / aplikasi / produk:
A. Memenuhi persyaratan bisnis dan teknis yang yang dipandu desain dan pengembangan; B. Bekerja seperti yang diharapkan, dan
C. Dapat diimplementasikan dengan karakteristik yang sama.
Software pengujian, tergantung pada metode pengujian yang digunakan, dapat diterapkan pada setiap saat dalam proses pembangunan. Namun, sebagian besar upaya uji terjadi setelah persyaratan yang telah dibuat dan proses pengkodean telah selesai. Dengan demikian, metodologi tes diatur oleh metodologi pengembangan perangkat lunak diadopsi. model pengembangan perangkat lunak yang berbeda-beda akan memfokuskan upaya uji pada titik-titik yang berbeda dalam proses pembangunan. model-model pembangunan yang lebih baru, seperti Agile, sering menggunakan tes didorong pengembangan dan menempatkan porsi peningkatan pengujian di tangan developer, sebelum mencapai sebuah tim penguji formal. Dalam model yang lebih tradisional, sebagian besar terjadi setelah pelaksanaan tes persyaratan yang telah dibuat dan proses pengkodean telah selesai. 2. Sistem Design
MC Gegas terdiri dari 3 bagian besar antara lain :
1. Motion capture software 2. Animation database engine 3. Render farm
Software Mc Gegas ini adalah pengembangan dari riset teknologi grid yang pernah dibuat sebelumnya. Software ini membuat animasi yaitu dalam proses pembuatan gerakan obyek―bagaimana membuatnya tampil realistis dengan waktu yang relatif cepat. Dengan McGegas, gerakan manusia sebagai model untuk objek 3D dapat ditangkap (capture) secara cepat dan akurat. Hasil dari proses capture tersebut lalu ditransformasikan menjadi gerakan model 3D yang diinginkan. Software ini dikembangkan menggunakan beberapa teknologi open source. Untuk teknologi render farm, kami menggunakan globus server dan toolkitnya. Blender digunakan
untuk modeling animasinya. Dan untuk melakukan pengaturan dan rendering frame, menggunakan Yadra. Selain itu jugamenggunakan teknologi artificial intelligent (AI) untuk melengkapi McGegas
3 Pengolahan data rekonstruksi 2D
Pengambilan data rekonstruksi 2Ddigunakan untuk mendapatkan data berupa matrik yang digunakan untuk menentukan posisis dari masing – masing marker yang kita gunakan pada saat pengambilan data.Dengan adanya data rekonstruksi ini dapat digunakan untuk labeling dari sebuah objek. Data rekonstruksis 2D ini akan kita ambil per kamera sehingga data yang akan kita dapatkan adalah 8 data camera.
Berikut adalah urutan bagaimana cara untuk mendapatkan data rekonstruksi 2D adalah sebagai berikut :
Kita akan memasukkan data dengan cara Open file yang akan kita jadikan data dan kemudian kita play dan akan kita dapatkan kordinat dari masing – masing marker. Seperti yang kita bias liat dibawah ini :
Hasil yang kita dapatkan dari program rekonstruksi 2D adalah berupa matrik sebagai berikut :
Data tersebut diatas yang akan kita gunakan untuk software MC Gegas Motion Capture dan akan diinputkan untuk menentukan posisi dari masing – masing marker sehingga berguna untuk proses labeling.
Berikut adalah banyaknya frame yang dihasilkan dari masing – masing camera adalah sebagai berikut :
Camera Durasi Frame
Camera 1 253 detik 7617 Camera 2 256 detik 7681 Camera 3 255 detik 7671 Camera 4 256 detik 7699 Camera 5 260 detik 7812 Camera 6 255 detik 7669 Camwra 7 263 detik 7904 Camera 8 272 detik 8187 Tabel 3.1 Frame yang dihasilkan masing
4. TESTING PROGRAM
4.1 Proses Input Data
Pertama kali yang akan kita lakukan dalam proses testing dari program adalah memasukkan data untuk mengetahui apakah program tersebut dapat berjalan. Sebelum kita input data terlebih dahulu kita membuat project baru dan mengganti jumlah camera yang ada sesuai dengan yang kita gunakan yaitu 8 camera.
Urutan dari proses input data untuk Program Mc Gegas Motion Capture ini adalah sebagai berikut
1. Input Data Import AVI
Pertama kali yang dilakukan adalah kita import file berupa video yang telah kita ambil sebagai data yang akan kita gunakan. Urutan dari import AVI ini dilakukan per kamera dan sesuai dengan data yang telah kita ambil berupa video Tari pendet dari masing – masing camera.
2. Input Data Matrix Kalibrasi
Input kalibrasi ini digunakan untuk menentukan offset dari program Mc Gegas Motion Capture tersebut. Input dari matrix kalibrasi ini adalah kita gunakan data dari demo12 april yang sudah kita cek untuk kalibrasinya.
Saat kita import kalibrasi yang kita gunakan adalah file .mtx yaitu berupa matrix
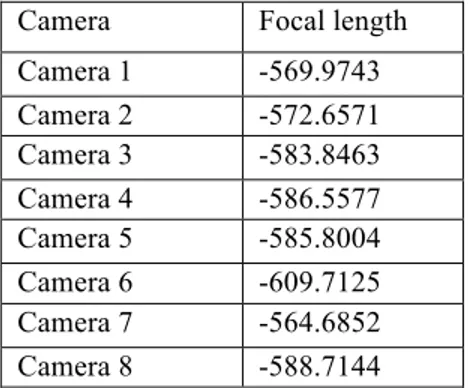
3. Input Data Focal Length
Input dari Focal Length ini adalah kita gunakan data dari demo12 april .
Saat kita input focal length yang kita gunakan adalah file .fcl
Data dari focal length yang kita inputkan adalah sebagai berikut :
Camera Focal length Camera 1 -569.9743 Camera 2 -572.6571 Camera 3 -583.8463 Camera 4 -586.5577 Camera 5 -585.8004 Camera 6 -609.7125 Camera 7 -564.6852 Camera 8 -588.7144
Tabel 4.1.3 Data Focal length dari masing – masing camera
4. Input Data Offset
Input data offset ini kita gunakan untuk menentukan offset dari data video yang kita ambil. Cara untuk menentukan input data offset adalah kita tentukan berdasarkan dari masing – masing camera sehingga waktu untuk memulainya adalah sama.
Gambar 4.1.4 Input Data offset Data dari focal length yang kita inputkan adalah sebagai berikut :
Camera Offset Camera 1 597 Camera 2 555 Camera 3 493 Camera 4 448 Camera 5 297 Camera 6 235 Camera 7 754 Camera 8 955
Tabel 4.1.4 Data Focal offset dari masing – masing camera
5. Input Data Import File Motion
Input data Import file motion ini digunakan untuk menentukan posisi dari masing – masing marker dan berupa titik koordinat dan data yang kita gunakan berupa matrik dari masing – masing kamera yang telah di rekonstruksi 2D.
6. Input Data Set Start Frame
Input data dari set start frame ini digunakan untuk menentukan mulai frame yang sudah kita setting saat input offset sampai stop offset sehingga range frame yang digunakan sama.
Gambar 4.1.6 Input Data Set start Frame Data dari set start frame ini kita mulai dari frame 1 yang telah kita setting terlebih dahulu pada input data offset. Dan kemudian kita setting untuk stop offsetnya adalah 6900 frame.
4.2 Proses Labeling dari software MC Gegas
Motion Capture
Berikut adalah urutan dari testing program MC Gegas Motion Capture setelah kita masukan inputan dari masing – masing data yang diperlukan.
Setelah kita proses data yang telah kita masukkan maka akan kita dapatkan hasil dari video yang telah kita masukkan ke data dengan adanya marker yang tahap selanjutnya harus kita berikan label dengan urutan ABCDEFGHIJKLMN dan kita akan dapatkan rekonstruksi berupa hierarchical rigid-body.
Berikut adalah hasil yang kita peroleh setelah kita lakukan labeling.
5. PENUTUP 5.1 Kesimpulan
1. Pada software MC Gegas Motion capture ini kita dapat lebih menghemat waktu dalam pembuatan motion capture 2. Frame yang dihasilkan untuk setiap
detiknya rata – rata adalah 30 frame 3. Tingkat keakuratan dari data motion
capture ini tergantung dari posisi dari masing – masing marker
5.2 Saran
1. Pada software Mc Gegas Motion Capture ini yang kita terapkan pada Tari pendet membutuhkan beberapa pembaharuan antara lain dari segi marker yaitu memberikan marker dibagian jari untuk mendeteksi gerakan jari untuk tarian pendet .
DAFTAR PUSTAKA
[1]Motion Capture. Online at:
http://www.animationarchive.org
[2] ] J.R. Bergen, P. Anandan, K.J. Hanna, and R. Hingorani. Hierarchical
model-based motion estimation. In ECCV, pages 237–252, 1992.
[3] ] G. Cameron, A. Bustanoby, K. Cope, S. Greenberg, C. Hayes,
and O. Ozoux. Panel on motion capture and cg character animation.