1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Gempa bumi pada tahun 2006 yang terjadi di Yogyakarta mengindikasikan keberadaan Sesar Opak. Sesar Opak adalah sesar yang terletak di sekitar sebelah barat Sungai Opak. Posisi Sesar Opak terletak pada koordinat 423091,6 UTM BT dan 9115631,1 UTM LS (Nurwidyanto, dkk, 2010). Kajian seismik yang dilakukan oleh tim peneliti Teknik Geodesi UGM dan ITB bekerjasama dengan Nagoya University menyimpulkan bahwa sesar penyebab gempa Yogyakarta tahun 2006 merupakan sesar sinistral (left-lateral) dengan sudut stike sekitar 48° dan sudut kemiringan (dip angle) sekitar 89°. Berdasarkan survei GPS yang telah dilakukan, sesar yang menyebabkan gempa Yogyakarta tahun 2006 terletak sekitar 5 s.d 10 km di sebelah timur lokasi Sesar Opak, di mana biasanya digambarkan di sepanjang Sungai Opak (Abidin, dkk, 2009).
Aktifnya Sesar Opak dengan potensi kegempaan relatif tinggi perlu dilakukan pemantauan daerah tersebut secara kontinyu. Pemantauan dilakukan dengan pengadaan stasiun pengamatan yang tersebar di sekitar lokasi Sesar Opak. Pengadaan stasiun pengamatan di sekitar Sesar Opak telah dilakukan oleh Laboratorium Geodesi Jurusan Teknik Geodesi FT UGM tahun 2013. Pengadaan stasiun GNSS pemantauan Sesar Opak yang terbentuk untuk pemantauan geodinamik terdiri atas stasiun Teknik Geodesi, Segoroyoso, dan Opak. Selanjutnya stasiun Teknik Geodesi disebut jaring makro TGD. Stasiun Segoroyoso disebut jaring mikro SGY dan stasiun Opak disebut jaring mikro OPK. Jaring makro TGD menyebar di kabupaten Sleman, Gunung Kidul, Kulonprogo dan Bantul, Daerah Istimewa Yogyakarta yang melingkupi Sesar Opak. Sedangkan jaring mikro SGY terletak di daerah Sesar Segmen Segoroyoso yang lokasinya relatif lebih dekat dengan Sesar Opak.
Analisis pergeseran yang terjadi pada studi geodinamik menuntut penentuan koordinat dengan ketelitian tinggi. Penentuan posisi teliti pada jaring GNSS makro
TGD maupun mikro SGY yang terdapat pada Sesar Opak dipengaruhi oleh berbagai faktor. Menurut Abidin (2002), ketelitian yang didapat dari suatu survei GPS secara umum bergantung pada empat faktor yaitu ketelitian data yang digunakan, geometri pengamatan, strategi pengamatan yang digunakan, dan strategi pengolahan data yang digunakan. Dari hal tersebut, perlunya sinergi antara pemilihan perangkat lunak dan strategi pengolah data yang tepat. Survei pemetaan yang menuntut ketelitian tinggi mengutamakan penggunaan perangkat lunak ilmiah. Salah satu perangkat lunak ilmiah adalah GAMIT (GPS Analysis Package Developed at MIT). Perbedaan yang dapat dilihat dari pemilihan perangkat lunak terdapat pada mekanisme penanganan koreksi terhadap efek dari kesalahan dan bias (Abidin, 2002).
Pengolahan data GPS dengan perangkat lunak ilmiah perlu memperhatikan strategi pengolah data, khususnya perataan jaring untuk menentukan koordinat akhir dari titik kerangka yang terdapat dalam jaringan. Salah satu faktor penting dalam proses perataan jaring adalah pendefinisian terhadap titik ikat. Pemilihan titik ikat didasarkan pada konektivias titik terhadap jaringan, konfigurasi titik ikat dan tingkat ketelitian titik ikat yang digunakan (Abidin, 2002). Pada penelitian ini, evaluasi hasil pengamatan GNSS ditinjau dari strategi pengolahan data dalam hal penggunaan titik ikat dalam perhitungan koordinatnya. Titik ikat berdasarkan cakupan areanya terdiri atas titik ikat global, regional dan lokal. Kajian dalam penelitian ini dilakukan pada jaring makro TGD dan mikro SGY. Evaluasi dilakukan pada koordinat dan ketelitian pada jaring makro TGD mapun mikro SGY pada pengolahan menggunakan titik ikat global dan lokal. Dalam hal ini yang dimaksud titik ikat global adalah stasiun pengamatan International GNSS Services (IGS). Titik ikat lokal adalah stasiun pengamatan Sesar Opak pada jaring makro TGD. Titik ikat lokal ini diolah terlebih dahulu dengan pengolahan GAMIT dan GLOBK. Selanjutnya pengolahan menggunakan titik ikat global disebut dengan pengolahan global, sedangkan pengolahan menggunakan titik ikat lokal disebut pengolahan lokal. Evaluasi hasil koordinat dan ketelitian hasil pengolahan dianalisis perbedaannya dengan uji stastistik. Selanjutnya, hasil evaluasi tersebut dapat digunakan sebagai referensi penggunaan titik ikat untuk penentuan posisi stasiun pengamatan pada studi geodinamika Sesar Opak.
I.2. Identifikasi Masalah
Pada studi geodinamika Sesar Opak diperlukan koordinat dengan ketelitian tinggi. Pada penentuan koordinat tersebut diperlukan sinergi antara pemilihan perangkat lunak dan strategi pengolahan data. Dalam penelitian ini strategi pengolahan data GNSS menggunakan titik ikat global dan titik ikat lokal. Berkaitan dengan hasil pengamatan GNSS jaring makro TGD dan mikro SGY pada Sesar Opak, perlu dikaji ketelitian koordinat yang dihasilkan dengan penggunaan titik ikat yang berbeda.
I.3. Pertanyaan Penelitian Pertanyaan penelitian ini adalah :
1. Berapa nilai koordinat dan ketelitian stasiun pengamatan pada jaring makro TGD dan mikro SGY yang dihitung dengan titik ikat global?
2. Berapa nilai koordinat dan ketelitian stasiun pengamatan pada jaring mikro SGY yang dihitung dengan titik ikat lokal?
3. Apakah terdapat perbedaan signifikan antara ketelitian yang dihasilkan pada jaring makro TGD dengan titik ikat global maupun jaring mikro SGY yang dihitung dengan menggunakan titik ikat berbeda?
I.4. Cakupan Penelitian Cakupan penelitian ini adalah :
1. Data yang digunakan adalah data pengamatan GNSS pada jaring makro TGD dan mikro SGY tahun 2014 (Laboratorium Geodesi Jurusan Teknik Geodesi FT UGM).
2. Jaring makro TGD merupakan jaring yang didefinisikan dengan stasiun TGD yang terletak di wilayah Yogyakarta.
3. Jaring mikro SGY merupakan jaring yang didefinisikan dengan stasiun SGY yang terletak di sekitar Sesar Segmen Segoroyoso.
4. Pengolahan data pengamatan GNSS menggunakan perangkat lunak ilmiah GAMIT/GLOBK 10.5.
5. Evaluasi ketelitian koordinat dilakukan pada hasil pengolahan dengan titik ikat global dan titik ikat lokal.
6. Analisis hasil menggunakan uji stastistik signifikansi perbedaan simpangan baku koordinat.
I.5. Tujuan Penelitian
Tujuan penelitian ini adalah untuk menentukan nilai koordinat dan ketelitian stasiun pengamatan pada jaring GNSS mikro SGY maupun makro TGD dengan perbedaan penggunaan titik ikat lokal dan global pada pengolahannya.
I.6. Manfaat Penelitian
Manfaat yang diperoleh dari kajian ini adalah dapat diketahuinya nilai koordinat dan ketelitian stasiun pengamatan pada pengolahan jaring GNSS mikro SGY maupun makro TGD. Dengan demikian dapat ditentukan strategi pengolahan data GNSS pemantauan Sesar Opak dalam penggunaan titik ikat yang menghasilkan ketelitian koordinat yang tinggi untuk studi geodinamika.
I.7. Tinjauan Pustaka
Widjajanti dan Parseno (2013) melakukan penelitian tentang strategi dalam penentuan jaring kontrol GPS untuk studi geodinamika di Patahan Opak. Penelitian tersebut melakukan kajian optimasi pada jaring makro pemantauan Patahan Opak yang selanjutnya stasiun pengamatannya diberi nama TGD. Penelitian tersebut membandingkan kriteria optimum dari fungsi tujuan akurasi pada desain yang direncanakan. Analisis dilakukan pada sumbu panjang dan sumbu pendek elips kesalahan. Dengan terpenuhinya syarat-syarat optimasi, maka dapat dikatakan bahwa ketelitian koordinat titik pengamatan TGD dengan kondisi jaringan yang terbentuk telah optimum.
Dedi dan Djawahir (2013) dalam penelitiannya mengenai jaring kontrol untuk mengidentifikasi pola deformasi Segmen Segoroyoso. Dalam penelitian tersebut diperoleh bahwa enam (6) titik kontrol untuk monitoring Sesar Opak Segmen Segoroyoso telah terpasang dan telah didefinisikan koordinatnya pada kala 2013. Hasil pengolahan data pengamatan GNSS menggunakan perangkat lunak komersial
menunjukkan hasil yang sesuai dengan hasil hitungan optimasi jaring yang telah dilakukan sebelumnya. Elips kesalahan pada jaring TGD fixed terdistribusi merata dan elips kesalahan titik SGY6 relatif lebih besar dibanding titik lain. Dalam penelitian tersebut disarankan perlu pengikatan pada koordinat TGD2 ke jaring kontrol nasional maupun internasional agar ke depan koordinat pada jaring monitoring Sesar Opak Segmen Segoroyoso ini dapat digabungkan dengan jaring titik kontrol lain.
Safrina (2014) melakukan penelitan tentang penentuan posisi pada stasiun pengamatan GNSS di kawasan Sesar Opak. Pada penelitian tersebut data yang digunakan merupakan data stasiun pengamatan Opak (OPK) tahun 2013 yang diikatkan pada titik ikat global dan stasiun aktif BPN. Titik ikat global dan stasiun aktif BPN yang digunakan sebagai titik ikat masing-masing berjumlah 12 titik. Dalam penelitian tersebut penggunaan 12 titik ikat global meningkatkan ketelitian hasil pengolahan koordinat pada stasiun pengamatan rata-rata 1,5 mm, dibandingkan penggunaan tujuh titik ikat global pada penelitian sebelumnya. Hasil penelitian tersebut adalah penggunaan titik ikat global menghasilkan simpangan baku yang lebih tinggi dibandingkan penggunaan titik ikat stasiun aktif BPN. Selisih rata-rata ketelitian pada komponen X sebesar 0,629 m, komponen Y sebesar 1,006 m dan pada komponen Z sebesar 0,5 m.
Panuntun (2012) melakukan penelitian pada penentuan posisi Anjungan Minyak Lepas Pantai. Penelitian tersebut dilakukan dengan menggunakan enam titik ikat regional dan tujuh titik ikat global. Tujuannya untuk mengetahui posisi anjungan minyak lepas pantai dengan teliti. Hasil dari penelitian ini adalah penggunaan titik ikat global mempunyai ketelitian lebih tinggi dibandingkan dengan titik ikat regional. Ketelitian tertinggi menggunakan titik ikat global mencapai 2,46 mm pada posisi X, 8,54 mm pada posisi Y dan 1,53 mm pada posisi Z. Sedangkan ketelitian tertinggi dengan menggunakan titik ikat regional adalah 55,49 mm pada posisi X, 123,64 mm pada posisi Y, dan 39,29 mm pada posisi Z.
Widjajanti (2008) melakukan penelitian terhadap pengaruh dari konfigurasi stasiun referensi terhadap pengolahan GPS baseline panjang. Penelitian ini dilakukan dengan perancangan beberapa konfigurasi jaringan dalam pengolahan GPS baseline
panjang dengan menguji adanya pengaruh jumlah stasiun referensi dan jarak antar stasiun. Stasiun yang digunakan adalah stasiun global (IGS) dan stasiun regional dengan diolah menggunakan perangkat lunak GAMIT. Hasil dari penelitian ini adalah stasiun referensi meningkatkan kualitas data yang dihasilkan. Pemilihan terhadap stasiun referensi global harus diperhatikan karena jarak yang terlalu panjang dapat menyebabkan konfigurasi jaring yang tidak bagus. Akurasi tertinggi dihasilkan pada posisi X, Y, dan Z adalah masing-masing kurang dari 2 m.
Lestari (2006) melakukan penelitian mengenai stabilitas pada situs Candi Borobudur dengan pengamatan dan pembuatan jaring GPS. Pada penelitian tersebut menggunakan total 12 titik pengamatan GPS. Titik tersebut terdiri dari empat titik pengamatan outer ring yaitu BORA, BORB, BORC, dan BORD dan delapan titik yang terdapat di sekitar Candi Borobudur yang digunakan dalam analisis deformasi. Pada penelitian tersebut pengolahan data dilakukan pada titik BORA, BORB, BORC, dan BORD yang diikatkan terlebih dahulu dengan pengolahan global. Pada pengolahan global, titik ikat yang digunakan yaitu enam titik ikat IGS yang terdiri dari BAKO, COCO, DARW, KARR, JABI, NTUS dan ditambah dua titik ikat regional Indonesia yaitu KOEP dan PARE pada pengolahan data pengamatan 2002. Sedangkan pengolahan data pengamatan 2003, titik ikat global merupakan enam titik IGS ditambah dengan empat titik ikat regional Indonesia yaitu KOEP, AMPE, LMBR, dan BIMA. Titik pengamatan outer ring yang telah dilakukan pada pengolahan tersebut, dijadikan titik ikat pada delapan titik ikat pengamatan lain sebagai pengolahan lokal. Hasil dari penelitian tersebut menunjukkan bahwa nilai deformasi kurang dari 4 mm per tahun untuk posisi horizontal pada semua titik dengan tingkat kepercayaan 95%. Nilai deformasi untuk posisi vertikal pada lorong stupa tingkat kurang dari 7 mm per tahun dengan tingkat kepercayaan 95%. Nilai deformasi tersebut tidak signifikan, namun nilai deformasi yang signifikan dapat ditemukan di sudut lorong stupa tingkat.
Adhicita (2007) melakukan penelitian penggunaan metode relax dan baseline pengolahan data GPS dengan perangkat lunak GAMIT. Penelitian ini melakukan pengolahan data pada proyek pengamatan situs Candi Borobudur 2003 dengan membedakan pengolahan dengan menggunakan opsi choice of experiment pada
GAMIT yaitu relax dan baseline. Pengolahan data membagi mejadi project global dan lokal. Pada project global titik-titik yang terletak di halaman taman candi Borobudur diolah menggunakan titik kontrol regional dan global, sedangkan pada
project lokal titik-titik di teras candi yang sudah diolah tadi dijadikan titik kontrol
guna menentukan titik-titik yang terdapat di atas dan sekitar stupa candi. Hasil penelitian tersebut adalah penggunaan opsi choice of experiment relax, pada kontrol
table GAMIT sesuai digunakan pada pekerjaan melibatkan baseline relatif panjang.
Sedangkan pada choice of experiment baseline sesuai digunakan pada pekerjaan yang melibatkan baseline yang relatif pendek.
Penelitian ini menggunakan data jaring GNSS pengamatan Sesar Opak tahun 2014 yang terdiri dari jaring makro TGD dan mikro SGY. Pengolahan dilakukan dengan referensi titik ikat global dan lokal. Titik ikat lokal merupakan jaring makro TGD yang sebelumnya telah diolah dengan titik ikat global. Pengolahan pada peneltian ini menggunakan perangkat lunak ilmiah GAMIT/GLOBK dengan choice
of experiment relax dan baseline.
I.8. Landasan Teori 1.8.1. Sesar
Sesar (fault) merupakan bentuk rekahan yang terdapat pada lapisan batuan bumi yang menimbulkan suatu blok batuan bergerak relatif terhadap blok yang lain.
Slip merupakan jarak batuan yang telah berpindah di sisi lain dari sebuah sesar.
Gerakan sepanjang sesar mungkin bertahap, atau batuan dapat bergerak secara tiba-tiba, yang menghasilkan gempa bumi. Beberapa sesar yang terdiri atas berbagai patahan yang berdekatan disebut zona sesar. Batuan dapat bergeser ratusan meter atau bahkan kilometer di sepanjang zona sesar. Batuan bergerak berulangkali di sepanjang patahan dan zona patahan disebabkan oleh pergerakan tektonik. Pergerakan tektonik pada umumnya melakukan desakan di tempat yang sama dalam waktu yang lama. Selain itu, disebabkan oleh patahan yang telah terbentuk pertama kali. Hal tersebut memudahkan sebuah pergerakan dapat terjadi lagi (Thompson dan Thurk, 1997).
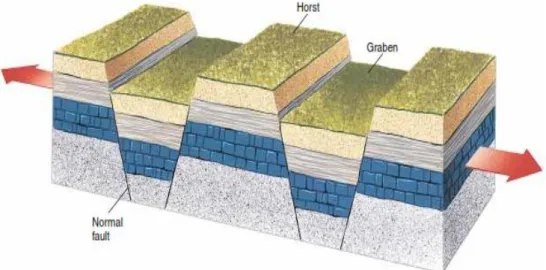
Pergeseran pada sesar bisa terjadi sepanjang garis lurus yang disebut sesar translasi atau terjadi putaran yang dinamakan sesar rotasi. Pergeseran-pergeseran ini mempunyai dimensi berkisar antara beberapa sentimeter sampai ratusan kilometer. Patahan menyebabkan lapisan kulit bumi retak atau patah. Bagian muka bumi yang mengalami patahan seperti horst dan graben. Horst adalah tanah naik, hal tersebut terjadi saat ada pengangkatan. Graben adalah tanah turun, terjadi saat blok batuan mengalami penurunan. Ilustrasi horst dan graben dapat dilihat pada Gambar I.1.
Gambar I.1. Terjadinya horst dan graben (Thompson dan Thurk, 1997). 1.8.2. Sesar Opak
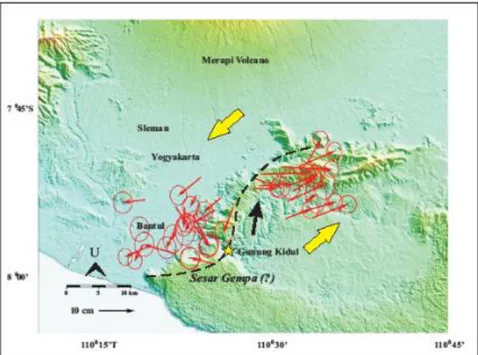
Sesar Opak adalah sesar yang terletak di sepanjang Sungai Opak di mana posisinya terletak di sekitar sebelah barat Sungai Opak. Berdasarkan hasil survei GPS pada tahun 1998, 2006, dan 2008 mendapatkan keterangan bahwa besarnya deformasi koseismik gempa Yogyakarta 2006 berkisar antara 10 s.d 15 cm atau lebih kecil, dilihat dari komponen horizontal maupun vertikal. Deformasi setelah seismik arah horizontal adalah sekitar 0,3 s.d 9,1 cm. Pemodelan dislokasi yang dilakukan Okada didasarkan pada vektor pergeseran deformasi koseismik serta kedalaman gempa-gempa susulan. Proses estimasi pada pemodelan tersebut dihasilkan bahwa sesar penyebab gempa Yogyakarta 2006 adalah sesar sinistral (left-lateral) dengan sudut strike sekitar 48° dan sudut kemiringan (dip angle) sekitar 89° (Abidin, dkk, 2007). Sesar penyebab gempa Yogyakarta 2006 yang diestimasi dari hasil survei GPS ini, terletak sekitar 5 s.d 10 km di sebelah timur lokasi Sesar Opak. Sesar Opak
digambarkan terdapat pada sesar geser kiri yang meliuk sesuai dengan data yang diperolehnya seperti terlihat pada Gambar I.2.
Gambar I.2. Perkiraan lokasi sesar yang menyebabkan gempa Yogyakarta tahun 2006 (Abidin, dkk., 2009)
1.8.3. Global Navigation Satellite System (GNSS)
GNSS adalah metode pengoperasian dan kesesuaian pada gabungan beberapa sistem navigasi satelit yang disediakan dalam rangka kepentingan pengukuran di seluruh dunia. Satelit-satelit yang ada, melakukan transmisi sinyal radio dengan frekuensi tinggi pada receiver. Frekuensi tinggi tersebut membawa data posisi dan waktu yang diambil menggunakan receiver yang memungkinkan pengguna mengetahui posisi lokasi di atas permukaan bumi.
Teknologi GNSS telah jauh berkembang dengan adanya satelit yang bergabung dengan sistem GNSS seperti GPS, GLONASS, dan GALILEO (Abidin, 2007). Satelit GPS dimiliki oleh Amerika serikat, GLONASS milik Eropa, dan GALILEO milik Rusia. GNSS memiliki keuntungan dibandingkan dengan GPS, karena pada sistem GNSS satelit yang ditangkap oleh receiver tidak hanya satelit GPS tetapi juga melibatkan satelit lain. Adanya data pengamatan dari satelit lain, penentuan posisi menjadi semakin baik. Selanjutnya dijelaskan lebih detil tentang teknologi GPS.
1.8.4. Global Positioning System (GPS)
GPS (Global Positioning System) merupakan sistem navigasi dan penentuan posisi menggunakan satelit. GPS dapat digunakan banyak orang sekaligus dalam berbagai cuaca, serta didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti, dan informasi waktu secara kontinyu di seluruh dunia. Sistem GPS terdiri atas tiga segmen utama yaitu segmen angkasa, segmen kontrol dan segmen pemakai (Abidin, 1995).
1.8.4.1. Segmen angkasa. Satelit GPS pada prinsipnya memiliki konstelasi 24 satelit. Konstelasi satelit tersebut menempati enam orbit yang berbentuk mendekati lingkaran. Setiap orbit ditempati oleh empat satelit dengan interval antaranya tidak sama. Orbit satelit GPS memiliki sudut inklinasi sebesar 55° terhadap bidang ekuator dengan ketinggian rata-rata di permukaan bumi sekitar 20.200 km. Setiap satelit GPS secara kontinyu memancarkan sinyal-sinyal pada dua frekuensi L-band yang dinamakan L1 dan L2. Pengamatan terhadap sinyal satelit dengan jumlah waktu cukup dapat diproses untuk mendapatkan informasi posisi, kecepatan, dan waktu.
1.8.4.2. Segmen kontrol. Satelit-satelit GPS dipantau oleh sistem kontrol yang terdiri atas beberapa stasiun monitor dan kontrol yang tersebar di seluruh dunia. Segmen kontrol satelit GPS dilakukan untuk mengecek kelaikgunaan satelit GPS tersebut. Selain itu juga berfungsi sebagai penentuan orbit dari seluruh satelit GPS yang merupakan informasi utama untuk penentuan posisi dengan satelit. Stasiun monitor terdapat di beberapa tempat diantaranya, Diego Garcia (Samudra Hindia), Kwajalein (Samudra Pasifik bagian utara), Pulau Ascension (Samudra Atlantik bagian selatan), Hawai, dan Colorado Springs.
1.8.4.3. Segmen pengguna. Segmen ini terdiri atas berbagai pihak yang memanfaatkan penggunaan satelit GPS untuk berbagai keperluan. Segmen pengguna dapat memanfaatkan fasilitas tersebut, dengan menggunakan alat penerima sinyal
receiver GPS. Receiver GPS diperlukan untuk menerima dan memproses sinyal dari
1.8.5. Pengamatan Dasar GPS
Pengamatan dasar pada GPS dalam penentuan jarak ke satelit terdapat tiga macam yaitu pseudorange, carrier phase dan integrasi doppler (Sunantyo, 2000).
1.8.5.1. Metode pseudorange. Prinsip pengamatan pseudorange adalah pengurangan antara waktu pemancar sinyal dalam suatu skala waktu (t) dan waktu kedatangan sinyal dalam suatu skala waktu (T) yang dipancarkan oleh satelit. Pengukuran jarak pseudorange ini didasarkan pada pengiriman sinyal dari satelit ke
receiver, sinyal tersebut berisi informasi mengenai waktu sementara pemancaran
gelombang, posisi satelit, nomor satelit dan beberapa informasi lainnya yang diperlukan. Metode ini berdasarkan pengukuran waktu rambat sinyal-sinyal yang dipancarkan dari minimal empat satelit GPS ke stasiun pengamatan pada saat bersamaan. Hasil pengamatan ini terkait dengan pengamatan dengan parameter lain dengan hubungan-hubungannya dapat diformulasikan sebagai persamaan (I.1) (Abidin, 1995) :
Pi = ρ + dρ + dtrop – dioni+ (dt – dT) + MPi + Pi ...(I.1) Dalam hal ini,
Pi : pseudorange pada frekuensi fi (m), (i = 1,2)
ρ : jarak geometris antara satelit pengamat (x,y,z) dengan satelit (m)
c : kecepatan cahaya dalam vakum (m/dt)
dρ : kesalahan jarak karena efek ephemeris dtrop : bias karena efek refraksi troposfer (m)
dioni : bias karena efek refraksi ionosfer (m)
dt, dT : kesalahan dan offset antara jam receiver dan jam satelit (m)
MPi : efek dari multipath pada hasil pengamatan Pi Pi : noise pada hasil pengamatan Pi
1.8.5.2. Merode carrier phase. Prinsip carrier phase diperoleh dengan melakukan pengurangan antara sinyal pembawa yang dibangkitkan oleh receiver saat penerimaan sinyal berlangsung dengan sinyal pembawa yang dibangkitkan oleh
pemancar sinyal satelit. Fase pembawa yang tidak penuh dapat diukur ketika sinyal diterima, jumlah integer gelombang penuh yang tidak diketahui disebut ambiguitas fase.
Metode carrier phase mempunyai prinsip perbedaan fase antara vektor posisi satelit ke titik pengamat yang merupakan fungsi perbedaan fase sinyal yang dipancarkan oleh satelit hingga diterima oleh receiver (Sunantyo, 2000). Penentuan jarak dengan carrier phase lebih teliti dibandingkan pseudorange. Jika jarak antara satelit telah diketahui, kemudian menggunakan suatu algoritma dapat dihitung posisi
receiver. Data jarak jika dihitung dengan carrier phase dapat diformulasikan pada
persamaan (I.2) (Abidin, 1995):
Li= ρ + dρ + dtrop – dioni+ (dt – Dt) + MCi - λi.Ni + ...(I.2) Dalam hal ini,
Li : jarak fase (carrier range) pada frekuensi fi (m), (i = 1,2)
ρ : jarak geometris antara pengamat (x,y,z) dengan satelit (m)
dρ : kesalahan jarak karena efek ephemeris
dtrop : bias karena efek refraksi troposfer (m)
dioni : bias karena efek refraksi ionosfer (m)
λi. : panjang gelombang dari sinyal (m)
dt, dT : kesalahan dan offset antara jam receiver dan jam satelit (m)
MCi : efek dari multipath pada hasil pengamatan Li
Ni : ambigiutas fase dari pengamatan fase sinyal-sinyal Li
rCi : gangguan noise hasil pengamatan Ci
1.8.5.3. Metode integrasi doppler. Prinsip dasar pengamatan dengan integrasi
doppler adalah melakukan pengamatan terhadap perubahan frekuensi yang
diakibatkan oleh gerak satelit-satelit GPS terhadap receiver. Berdasarkan prinsip ini maka rumusan matematis menggunakan prinsip integrasi doppler terdapat pada persamaan (I.3) (Sunantyo, 2000):
fr = fs (1-(dj/dt)/c)………...(I.3) Dalam hal ini,
fr : frekuensi yang diterima receiver fs : frekuensi sinyal dari satelit
dj/dt : laju perubahan jarak terhadap perubahan waktu
c : cepat rambat gelombang elektromagnetik dalam vakum 1.8.6. Penentuan Posisi GPS
Penentuan posisi menggunakan GPS memiliki konsep dasar reseksi atau pengikatan ke belakang dengan jarak. Jarak tersebut didapat dari pengukuran secara simultan beberapa satelit GPS yang koordinatnya sudah diketahui. Posisi titik dapat ditentukan menggunakan satu receiver GPS dengan metode penentuan posisi absolut, maupun relatif dengan minimal dua buah receiver yang salah satunya telah diketahui koordinatnya. Posisi yang diberikan GPS adalah posisi dengan dimensi (X,Y,Z atau
,,һ) dalam datum WGS48. Pengamatan ke satelit GPS membutuhkan minimal empat satelit pengamatan. Tiga pengamatan untuk menentukan parameter posisi (X,Y,Z atau,,һ) dan satu pengamatan untuk mendapat parameter waktu (t) (Abidin, 2002).I.8.6.1. Penentuan posisi metode absolut. Penentuan posisi absolut atau yang disebut juga dengan point positioning dilakukan dengan menggunakan satu receiver saja. Metode penentuan posisi absolut umumnya menggunakan data pseudorange. Penentuan posisi absolut pada suatu kala dengan menggunakan data pseudorange memerlukan beberapa parameter yang harus ditentukan ataupun diestimasi yaitu parameter koordinat (X,Y,Z atau,,һ) dan parameter kesalahan waktu yang disebabkan oleh tidak sinkronnya jam osilator satelit dan jam pada receiver GPS. Oleh karena itu, penentuan posisi secara absolut dengan data pseudorange diperlukan minimal pengamatan jarak ke empat buah satelit (Abidin, 1995).
Ketelitian yang dihasilkan dalam penentuan metode absolut tidak begitu tinggi, dalam praktiknya bahkan sampai fraksi meter. Dalam aplikasinya, metode penentuan
absolut terbatas dalam penggunaannya. Pada umumnya penggunaan metode ini digunakan dalam keperluan navigasi.
I.8.6.2. Penentuan posisi metode relatif. Penentuan posisi relatif adalah penentuan vektor jarak antara dua stasiun pengamatan yang dikenal dengan jarak basis (baseline). Penentuan posisi relatif melibatkan pengamatan simultan dari beberapa satelit dengan minimal dua receiver GPS. Penentuan suatu titik ditentukan secara relatif terhadap titik lainnya yang telah diketahui koordinatnya. Data ukuran pengamatan yang digunakan dalam penentuan posisi secara relatif dapat berupa
pseudorange maupun carrier phase.
Metode penentuan posisi relatif dilakukan dengan mengurangkan data pengamatan dua receiver GPS pada saat bersamaan. Beberapa jenis kesalahan dan bias dari data pengamatan dapat direduksi atau dihilangkan. Kesalahan yang dapat direduksi adalah kesalahan bias ionosfer, troposfer, dan ephemeris. Kesalahan yang dapat dihilangkan adalah kesalahan jam receiver dan jam satelit. Sedangkan kesalahan multipath yang bersifat lokal tidak dapat direduksi maupun dihilangkan. Reduksi dan penghilangan berbagai kesalahan dan bias ini meningkatkan ketelitian data, sehingga meningkatkan ketelitian posisi yang diperoleh. Efektifitas proses pengurangan ini tergantung pada jarak antara stasiun monitor dengan stasiun pengamatan yang ditentukan posisinya. Semakin pendek jarak tersebut maka semakin efektif, dan berlaku juga sebaliknya (Abidin, 1995).
1.8.7. Kesalahan dan Bias Pengamatan GPS
Kesalahan dan bias harus diperhitungkan secara baik dan benar agar mendapatkan ketelitian informasi yang tinggi. Kesalahan dan bias tersebut diantaranya adalah (Abidin, 1995) :
1. Kesalahan orbit satelit. Kesalahan yang disebabkan oleh posisi yang dilaporkan oleh ephemeris satelit. Posisi satelit yang dilaporkan ini tidak sama dengan posisi satelit pada keadaan sebenarnya. Kesalahan orbit ini mempengaruhi ketelitian dan koordinat titik-titik yang ditentukan. Kesalahan orbit satelit pada dasarnya disebabkan oleh tiga faktor yaitu tidak telitinya perhitungan orbit satelit oleh stasiun kontrol satelit, kesalahan
prediksi orbit untuk periode waktu setelah uploading ke satelit dan penerapan kesalahan orbit yang disengaja.
2. Bias ionosfer. Ionosfer merupakan lapisan atas atmosfer yang memiliki jumlah elektron dan ion bebas yang dapat mempengaruhi perambatan gelombang radio. Ion-ion bebas dalam lapisan ionosfer mempengaruhi sinyal yang terdapat pada GPS. Efek ionosfer mempengaruhi kecepatan, arah, polarisasi, dan kekuatan dari sinyal GPS yang melaluinya. Efek dari ionosfer yang paling besar terdapat pada kecepatan sinyal, dalam hal ini mempengaruhi ukuran jarak dari pengamat ke satelit.
3. Bias troposfer. Lapisan troposfer merupakan lapisan atmosfer bersifat netral yang berbatasan dengan permukaan bumi, di mana temperatur di sekitarnya menurun. Sinyal GPS mengalami gangguan ketika melalui troposfer yang menyebabkan perubahan pada kecepatan dan arah dari sinyal GPS. Efek utama dari troposfer adalah terhadap kecepatan, dengan kata lain terhadap hasil ukuran jarak. Pada pengolahan dengan menggunakan GAMIT, efek troposfer dapat direduksi dengan menggunakan pemodelan troposfer yaitu atmdisp_ce dan atmdisp_cm. File pemodelan tersebut dapat diunduh melalui ftp://garner.ucsd.edu/pub/GAMIT/tables.
4. Efek multipath. Multipath merupakan suatu fenomena di mana sinyal GPS tiba di antena melalui dua atau lebih lintasan yang berbeda. Satu sinyal merupakan sinyal langsung dari satelit ke antena, sedangkan sinyal lain merupakan sinyal-sinyal yang dipantulkan oleh benda-benda di sekitar antena sebelum akhirnya tiba di antena. Benda yang dapat memantulkan sinyal GPS antara lain jalan raya, sungai, kolam, danau, kendaraan dan gedung. Efek multipath mempengaruhi ukuran pseudorange dan carrier
phase. Efek multipath tergantung pada jenis dan posisi reflektor, posisi
relatif satelit, jarak reflektor ke antena, panjang gelombang ke antena dan juga kekuatan sinyal.
5. Ambiguitas fase. Ambiguitas fase adalah jumlah gelombang penuh yang tidak dapat diukur oleh receiver. Setiap pengamatan dengan satelit tertentu mempunyai nilai ambiguitas fase yang berbeda-beda. Setiap pengamatan fase dari satelit berbeda mempunyai ambiguitas fase tersendiri. Secara
umum terdapat tiga aspek dalam penentuan resolusi ambigutas fase yaitu eliminasi kesalahan dan bias dari data pengamatan, letak geometri satelit, dan teknik resolusi ambiguitas itu sendiri.
6. Cycle slips. Cycle slips merupakan penerimaan yang tidak terus menerus pada jumlah gelombang penuh dari fase gelombang pembawa yang diamati oleh receiver oleh suatu sebab. Cycle slips dapat disebabkan oleh beberapa hal antara lain menghidupkan dan mematikan receiver dengan sengaja secara tiba-tiba, terhalangnya sinyal GPS diterima, dan terdapat kerusakan pada receiver.
I.8.8. International GNSS Service (IGS)
IGS merupakan organisasi internasional yang bergerak dalam bidang stasiun GNSS. IGS mengumpulkan sumber dan data permanen dari stasiun GNSS dan juga melakukan pemeliharaan terhadap sistem tersebut. IGS sebelumnya International GPS Service didirikan oleh International Association of Geodesy (IAG) pada tahun 1993, dan secara formal beroperasi mulai tahun 1994. Setiap negara berkontribusi dalam IGS dengan membangun stasiun-stasiun IGS.
IGS merupakan kolaborasi kontribusi organisasi sukarela lebih dari 200 stasiun di lebih dari 80 negara. IGS global melacak lebih dari 300 jaringan tetap, stasiun GPS yang beroperasi secara terus menerus memberikan berbagai data set untuk analisis IGS pusat, untuk merumuskan produk yang tepat seperti ephemeris satelit
dan clock solutions (Kouba, 2009). Data IGS secara global disediakan melalui situs http://igscb.jpl.nasa.gov yang dapat diunduh secara gratis. Dengan menggunakan produk IGS yang tepat dengan menggabungkan data GPS fase pembawanya dan data pengamatan stasiun IGS yang paling dekat, penggunaan dalam pengukuran geodetik dapat mencapai posisi relatif yang tepat sesuai dengan ITRF global saat ini (Kouba, 2009).
1.8.9. International Terrestrial Reference Frame ( ITRF)
ITRF merupakan suatu kerangka koordinat global yang merupakan realisasi dari ITRS. ITRF direpresentasikan dalam suatu koordinat dan kecepatan yang didapatkan dari sejumlah titik yang tersebar yang berada di seluruh permukaan bumi.
Stasiun ITRF tersebut diamati dengan menggunakan metode-metode GPS, Lunar
Laser Ranging (LLR), Very Long Baseline Interferometry (VLBI), Solar Laser Ranging (SLR), dan DORIS. Jaring koordinat ITRF dipublikasikan oleh IERS setiap
tahunnya. ITRF yang dipublikasikan setiap tahun tersebut diberi nama ITRF-yy. Dalam hal ini, yy menunjukkan tahun terakhir data yang digunakan untuk menentukan kerangka tersebut. Sebagai contoh, ITRF94 menunjukkan kerangka koordinat dan kecepatan yang dihitung pada tahun 1995 dengan menggunakan semua data IERS sampai akhir tahun 1994 (SNI, 19-6724-2002).
1.8.10. Perangkat Lunak TEQC
TEQC merupakan perangkat lunak yang dikeluarkan oleh UNAVCO yang digunakan untuk memecahkan berbagai permasalahan dalam pre-processing data GNSS (Estey, L. dan Stuart, W., 2014):
1. Translation, membaca file GNSS data pengamatan asli dan digunakan untuk
konversi ke dalam data format lain.
2. Editing, digunakan dalam editing pada data pengamatan seperti melakukan
pemotongan dan koreksi dari file rinex hasil konversi.
3. Quality check, memeriksa kualitas data GPS dan/atau GLONASS data rinex
pengamatan file dengan atau tanpa file navigasi dengan ephemeris.
Tiga fungsi tersebut yaitu, translation, editing, dan quality check dapat digunakan secara terpisah, berpasangan ataupun bersama. Perangkat lunak TEQC dapat juga digunakan untuk (Estey, L. dan Stuart, W, 2014):
1. Translate (mengubah) format biner asli tertentu (misalnya, Trimble .*dat) kedalam format data rinex dengan file observation dan/atau tanpa file navigation.
2. Memeriksa file rinex atau spesifikasi file untuk memenuhi versi rinex. 3. Memodifikasi (editing) setiap field header rinex kedalam file rinex dan
output nya.
4. Quality check pada data obsevasi file rinex, tanpa melibatkan data file navigasi (disebut qc-lite, dengan TEQC tidak memiliki informasi posisi satelit) .
5. Quality check pada data observasi file rinex, dengan melibatkan data file navigasi (disebut qc-full, dengan TEQC memiliki informasi posisi satelit) . 6. Melakukan pemotongan (menentukan rentang waktu yang digunakan) atau
menggabungkan dua atau lebih file rinex.
7. Membuat file rinex baru dengan sampling interval lebih lama, misalnya dari 1 detik sampai dengan 30 detik.
Pada pengecekan kualitas data dengan TEQC beberapa parameter hasil pengecekan data pengamatan memenuhi kriteria apabila (Lestari, 2006):
1. Pengaruh ionospheric delay pada perekaman data satelit di elevation mask tidak banyak.
2. Efek multipath MP1 dan MP2 kurang dari 0,5 m.
3. Pengaruh Ionosphere Delay Observable (IOD) slips dan Ionosphere Delay
Observable+multipath (IOD+MP) slips kurang dari 100.
4. Data yang dibuang dari data keseluruhan relatif kecil. 1.8.11. Perangkat Lunak GAMIT/GLOBK
I.8.11.1. Perangkat lunak GAMIT. GPS Analysis Package Developed at MIT (GAMIT) adalah paket analisis GPS secara komprehensif, yang dibuat dan dikembangkan oleh Departement of Earth, Atmospheric and Planetary Science,
Massachussets Institute of Technology, USA. GAMIT merupakan perangkat lunak
ilmiah pengolahan data pengamatan GPS yang digunakan mengestimasi koodinat dan kecepatan, orbit satelit dan parameter orientasi bumi. Perangkat lunak ilmiah ini digunakan untuk mengestimasi posisi relatif tiga dimensi dari stasiun pengamatan dan orbit satelit.
Proses pengolahan GAMIT memerlukan delapan macam input, yaitu (Herring, dkk., 2010) :
1. Raw data merupakan data yang diperoleh dari hasil pengamatan GPS.
2. L-file, merupakan koordinat dari semua stasiun pengamatan dan titik referensi yang digunakan. Koodinat yang digunakan merupakan koodinat kartesi tiga dimensi.
lokasi stasiun, tinggi antena, model antena, model receiver, serta firmware yang digunakan oleh receiver, waktu pengamatan, start dan waktu akhir perekaman data, tahun pengamatan, keterangan doy (day of year).
4. File session.info, merupakan sesi dari data yang diolah. Informasi yang terdapat di dalamnya antara lain (tahun, doy, sesi pengamatan, sampling interval, banyak kala, dan nomor satelit). File session.info dapat dibuat dengan perintah makexp
5. File navigasi, dapat berupa RINEX (Receiver INdependent EXchange
format), navigation messages maupun satelit ephemeris yang telah
disediakan IGS.
6. File sestbl. File ini berisi control table yang menjelaskan karakteristik proses yang dieksekusi oleh GAMIT.
7. File sittbl. File ini memberikan constraint setiap stasiun pengamatan yang digunakan dalam pemrosesan data.
8. File GPS satelit ephemeris yang didapat dari IGS dalam format *sp3.
Hasil akhir yang didapat dalam proses pengolahan data pengamatan GPS menggunakan perangkat lunak GAMIT antara lain:
1. Autcln.summary, file ini terdiri atas autcln.prefit.sum dan autcln.post.sum.
File autcln.summary berisi data statistik hasil editing dengan autcln.
2. q-file, file ini memberikan informasi hasil pengolahan data pengamatan GPS pada GAMIT. Informasi tersebut disajikan dalam dua versi biasses-free
solution dan biasses-fixed solution. Informasi mengenai nilai fract dan nilai postfit nrms terdapat pada q-file.
3. h-file, file ini berisi hasil pengolahan dengan loosely constraint solutions.
File yang ada berupa parameter-parameter serta matriks varian kovarian yang
digunakan untuk input dalam pengolahan menggunakan GLOBK.
I.8.11.2. Perangkat lunak GLOBK. Global Kalman filter VLBI and GPS
analysis program (GLOBK) adalah perangkat lunak yang dapat mengkombinasikan
hasil pemrosesan data survei terestris maupun data survei ekstra terestris. Data input GLOBK merupakan matriks varian kovarian dari koordinat stasiun, parameter orbit,
parameter rotasi bumi, dan koordinat hasil pengamatan. Terdapat tiga aplikasi umum yang digunakan dalam GLOBK, (Lestari, 2006):
1. Memperoleh perkiraan stasiun koordinat rata-rata dari kombinasi sesi individu untuk lebih dari satu pengamatan multi-day.
2. Melakukan kombinasi perkiraan rata-rata data pengamatan stasiun koordinat yang diperoleh dari beberapa tahun pengamatan untuk memperkirakan kecepatan stasiun pengamatan.
3. Mengkombinaskan sesi pengamatan yang dilakukan dengan koordinat stasiun yang dianggap stokastik. Hasil dari proses ini adalah koordinat
repetabilities yang digunakan untuk evaluasi tingkat presisi dari pengukuran
harian maupun tahunan.
File yang digunakan pada pengolahan dengan GLOBK yaitu file koordinat pendekatan (*.apr), earthquake file (eq_file) dan command block file (com_file), sort
file (srt_file), apriori rotasi bumi (in_pmu). Proses harian (daily processing dengan
GLRED) dan terakhir dilakukan proses global (global processing dengan GLOBK). Proses pada GLOBK melakukan kombinasi lebih dari satu solusi, sekaligus melakukan pengikatan terhadap sebuah frame koordinat. Hasil yang didapat dari proses tersebut dapat berupa koordinat kartesi tiga dimensi, data panjang baseline, ketelitian data pengamatan dan titik ikat pengamatan.
I.8.12. Perataan Jaring pada GAMIT/GLOBK
I.8.12.1. Perataan jaring pada GAMIT. Perangkat lunak GAMIT menggunakan hitungan kuadrat terkecil parameter berbobot dengan teknik double difference dari pengamatan data fase untuk melakukan estimasi posisi dan orbit dari titik pengamatan. Pengolahan pada GAMIT berdasarkan pada koordinat observasi pengamatan, koordinat stasiun titik ikat dan parameter orbit (King dan Bock, 2002).
Perataan jaring GPS menggunakan perangkat lunak GAMIT adalah loosely
constrained network dengan menggunakan free-network quasi-observation berbobot
(King dan Bock, 2002). Pendekatan yang dilakukan menggunakan perataan baseline dengan melibatkan matriks varian kovarian sebagai persamaan hitungan kuadrat
terkecil parameter. Persamaan (I.4) berikut ini model matematis yang belum mengalami iterasi.
La = F(Xa) ...(I.4) Apabila terdapat dua receiver yang berada pada titik pengamatan A dan B. Titik pengamatan A mempunyai vektor koordinat XA, YA, ZA sedangkan titik pengamatan B mempunyai vektor koordinat XB, YB, ZB, kemudianreceiver tersebut melakukan pengamatan terhadap dua satelit yaitu m dan n.
Persamaan double difference pada titik pengamatan A dan B terdapat pada persamaan (I.5) dan (I.6).
2
2
2 A m A m A m m A X t X Y t Y Z t Z ...(I.5)
2
2
2 B n B n B n n B X t X Y t Y Z t Z ...(I.6)Koordinat stasiun A dianggap memiliki suatu nilai pendekatan yaitu
XA0,YA0,ZA0
sehingga diperoleh nilai XA, YA, danZA seperti pada persamaan (I.7), (I.8), dan (I.9). XA = X0A + dXA ...(I.7) YA = Y0A + dYA ...(I.8) ZA = Z0A + dZA...(I.9) Kemudian persamaan (I.5) dan (I.6) dilinierisasi sehingga menjadi persamaan (I.10) dan (I.11).
...(I.10) .…...(I.11)
Dengan melakukan substitusi persamaan tersebut ke dalam persamaan matriks residu, menghasilkan penyelesaian double difference menjadi persamaan (I.12).
mn AB A mn A mn A mn mn AB mn AB mn AB t rC t t cx t dX cy tdY cz t dZ N L () () () (). () (). . ...(I.12)
B n B n B n n B n B A m A m A m m A m A dZ t cz dY t cy dX t cx t dZ t cz dY t cy dX t cx t . . . . . . Selanjutnya penerapan metode parameter berbobot pada persamaan (I.4) sehingga menjadi persamaan (I.13).
L’a = Xa...(I.13) Persamaan matriks bobot terdapat pada persamaan (I.14) dan matriks residu pada persamaan (I.15).
2 1 0 0 P P P ...(I.14) V = A X + L ...(I.15) Sedangkan matriks A, X dan L dapat dilihat pada persamaan (I.16), (I.17), dan (I.18).
cx t cy t cz t A ABmn ABmn ABmn ...(I.16)
L t t
L ABmn ABmn ...(I.17) AB A A A N dZ dY dX X ...(I.18)Hasil persamaan observasi (I.15) yang dilinierisasi menjadi persamaan (I.19).
b b b Z Z Y Y X X L 0 0 0 ' ...(I.19)
Dalam hal ini,
L : matriks observasi A : matriks desain X : matriks parameter
N : ambiguitas fase m,n : satelit yang teramat A, B : titik pengamatan
(X0,Y0,Z0): koordinat pendekatan titik
Setelah melakukan perataan jaringan dengan menggunakan GAMIT, proses selanjutnya yaitu pendefinisian kerangka referensi dari loosely constrained network, kemudian melakukan pengolahan lanjutan menggunakan GLOBK.
I.8.12.2. Perataan jaring pada GLOBK. Proses hitungan pada GLOBK merupakan proses Kalman filter dengan kombinasi dari solusi-solusi hasil pengolahan data pengamatan. Terdapat tiga program utama dalam perangkat lunak GLOBK, yaitu GLOBK, GLRED, dan GLORG. GLOBK merupakan proses Kalman
Filtering yang digunakan untuk mengkombinasikan data pengolahan harian GAMIT
dan estimasi posisi rata-rata titik pengamatan. GLORG melakukan pengikatan terhadap titik-titik pengamatan titik-titik referensi yang diberikan. GLRED melakukan perhitungan posisi masing-masing hari. Ketelitian posisi yang diperoleh dengan membandingkan per waktu tertentu (Herring, dkk., 2010).
I.8.13. Evaluasi Hasil Pengolahan GAMIT/GLOBK
I.8.13.1. Evaluasi hasil pengolahan GAMIT. Evaluasi hasil pengolahan GAMIT dapat dilakukan dengan memperhatikan dua parameter evaluasi pada file
output q-file yaitu :
1. Posfit nrms (normalized root mean square). Nilai posfit nrms didapat dari persamaan (I.20).
Nilai postfit nrms = √ ...(I.20) Dengan nilai x = ̂ …...(I.21)
Dalam hal ini,
̂ : varian aposteori untuk unit bobot : varian apriori untuk unit bobot N : jumlah ukuran
Postfit nrms merupakan perbandingan nilai varian aposteriori dan varian
apriori untuk bobot. Standar nilai nrms berkisar antara ± 0,25, jika nilai
nrms kurang dari 0,25 menandakan tidak terdapat kesalahan serius pada
pemodelan (Herring, dkk., 2010).
2. Fract merupakan perbandingan pada nilai adjust dan nilai formal. Nilai fract didapat dari persamaan (I.22).
fract =
...(I.22) Dalam hal ini;
fract : nilai pembagian antara nilai adjust dan formal (m) adjust : nilai perataan masing-masing kordinat pendekatan (m) formal : ketidakpastian pada pemberian bobot hitungan
Nilai fract digunakan menganalisis kejanggalan yang terdapat pada nilai adjust dan pilihan melakukan iterasi untuk mendapatkan nilai adjust yang bebas dari efek
non-linear.
I.8.13.2. Evaluasi hasil pengolahan GLOBK. Evaluasi hasil pengolahan GLOBK dengan melihat pada log file dan plot time series. Log file menunjukkan konsistensi data harian secara internal. Log file berisi nilai stastistik termasuk simpangan baku yang digunakan untuk analisis terhadap nilai koordinat hasil olahan. Selain itu, evaluasi juga bisa dilakukan dengan melihat nilai stastistik chi-squared
increament per degree of freedom (x2/f). Nilai x2/f memiliki limit maksimal yaitu 30 (Lestari, 2006).
I.8.14. Uji Statistik
Uji statistik dilakukan dalam rangka membuat suatu keputusan berdasarkan asumsi-asumsi yang ada. Asumsi tersebut dapat benar (diterima) ataupun salah (ditolak). Uji statistik digunakan dalam hal membandingkan suatu hitungan dengan suatu hasil hitungan peratan sebelumnya, hasil dari hitungan (perataan), ataupun nilai teoritis suatu populasi. Hal tersebut digunakan untuk menjawab sebuah estimasi konsisten terhadap nilai asumsi dan/atau pengambaran nilai dari populasi tersebut atau tidak (Widjajanti, N., 2011).
Pada penelitian ini, evaluasi ketelitian koordinat stasiun pengamatan pada jaring mikro SGY dan makro TGD dilakukan dengan membandingkan nilai varian kovarian koordinat pada masing-masing hasil hitungan. Dalam hal ini, kriteria pengujian yang digunakan sesuai dengan persamaan (I.23) (Ghilani, C.D., 2010).
F= ...(I.23) Hipotesis yang ada, sebagai berikut :
H0 : σ21 = σ22 H : σ2
1 ≠ σ22
Hipotesis nol ditolak jika memenuhi persamaan (I.24) dan (I.25):
F > ...(I.24)
F> ...(I.25) Dalam hal ini,
: varian hasil hitungan pengolahan pertama : varian hasil hitungan pengolahan kedua : derajat kepercayaan
V1 : nilai degree of freedom1 V2 : nilai degree of freedom 2
Hasil yang didapatkan apabila terjadi penerimaan Ho maka ketelitian hasil kedua pengolahan tidak berbeda signifikan. Jika Ho ditolak maka ketelitian hasil kedua pengolahan berbeda signifikan.
I.9. Hipotesis
Hipotesis penelitian ini adalah ketelitian koordinat stasiun pengamatan pada jaring makro TGD dan mikro SGY yang diolah dengan perangkat lunak ilmiah mencapai fraksi milimeter. Jaring pengamatan mikro SGY yang diolah dengan titik ikat lokal diduga memiliki ketelitian yang lebih tinggi dibandingkan dengan pengolahan dengan titik ikat global (IGS). Jaring pengamatan makro TGD yang diolah bersama dengan jaring pengamatan mikro SGY dengan titik ikat global (IGS) diduga memiliki ketelitian lebih tinggi dibandingkan dengan pengolahan tanpa melibatkan jaring pengamatan mikro SGY.