BAB I
PENDAHULUAN
Bus Politeknik Negeri Jakarta atau yang biasa disebut BIPOL memegang peranan yang sangat penting dalam kegiatan akademik yang dilaksanakan di Politeknik Negeri Jakarta. Minimnya jumlah armada dan banyaknya mahasiswa yang memakainya, membuat BIPOL harus dilakukan perawatan dan pengembangan. Perawatan dan pengembangan bertujuan memberikan kenyamanan dan keamanan bagi para penumpang serta memperpanjang masa kelayakan BIPOL dalam beroperasi.
1.1 Latar Belakang
BIPOL memegang peranan penting yang merupakan merupakan satu-satunya transportasi massal yang dapat digunakan secara gratis oleh mahasiswa. Kenyamanan dan keamanan BIPOL tentulah harus mutlak diperhatikan. Pada tahun 2015, tercatat 5 armada BIPOL yang masih beroperasi untuk transportasi para mahasiswa. Minimnya jumlah armada dan banyaknya mahasiswa yang memakainya, membuat BIPOL harus dilakukan perawatan dan pengembangan. Perawatan dan pengembangan bertujuan memberikan kenyamanan dan keamanan bagi para penumpang serta memperpanjang masa kelayakan BIPOL. Diperlukan suatu penanganan lanjut untuk memberikan manfaat berupa kenyamanan bertranspotasi bagi mahasiswa sebagai penumpang BIPOL dan bagi BIPOL itu sendiri.
Sedikitnya jumlah armada BIPOL berbanding terbalik dengan banyaknya jumlah pengguna transportasi BIPOL. Kondisi tersebut mengharuskan suPIR BIPOL memaksakan BIPOL mengangkut penumpang dengan jumlah yang melampauai batas maksimum dari beban yang maksimum yang dianjurkan pabrikan bus. Hal ini menyebabkan ketidaknyamanan pengguna BIPOL disertai Sebuah sistem yang merupakan sistem pendeteksi penumpang dan pembatas jumlah penumpang pada
BIPOL diperlukan untuk memberikan kenyamanan bertransportasi menggunakan BIPOL bagi mahasiswa sebagai penumpang dan menjaga agar muatan penumpang pada BIPOL sesuai dengan berat yang dianjurkan dari muatan beban BIPOL.
Sistem pendeteksi penumpang merupakan suatu sistem yang mendeteksi ada atau tidaknya penumpang yang berdiri di depan pintu masuk atau pintu keluar BIPOL. Sistem ini mendeteksi keberadaan penumpang di depan pintu masuk atau pintu keluar BIPOL, penumpang yang akan menggunakan BIPOL harus berdiri di depan pintu masuk BIPOL agar pintu dapat terbuka secara otomatis dan penumpang dapat masuk kedalam BIPOL begitu juga sistem berlaku pada pintu keluar BIPOL.
Sistem pendeteksi penumpang terdiri dari sensor PIR dan Sistem Pneumatik. Sinyal masukkan yang berasal dari sensor PIR digunakan sebagai trigger untuk mengaktifkan relay yang terhubung ke solenoid valve pada pintu keluar dan pintu masuk. Saat sensor PIR mendeteksi adanya penumpang di depan pintu, sinyal masukkan dari sensor PIR yang berupa
logic 1 (high) digunakan sebagai trigger untuk mengaktifkan coil pada relay
sebesar 24 volt yang berfungsi sebagai input untuk kedua solenoid valve dan kran pada kompressor.
Sistem pembatas penumpang merupakan suatu sistem yang membatasi jumlah penumpang yang ada dalam BIPOL. Sistem ini terdiri dari dua instruksi, yaitu instruksi penghitung jumlah penumpang yang masuk dan keluar BIPOL dan instruksi penghitung jumlah beban setiap penumpang yang masuk dan keluar BIPOL.
Instruksi penghitung jumlah penumpang merupakan instruksi penghitung jumlah penumpang yang masuk dan keluar bus berdasarkan perubahan logic dari sinyal infra merah dari logic 1 (High) ke logic 0 (Low). Setiap penumpang yang masuk dan keluar BIPOL akan dihitung dan ditampilkan melalui indikator yang berupa LCD.
Instruksi penghitung jumlah beban penumpang merupakan instruksi penghitung jumlah beban setiap penumpang yang keluar dan masuk BIPOL
dengan mengukur berat setiap penumpang menggunakan loadcell. Data keluaran dari loadcell yang berupa analog dikonversi oleh modul HX711 yang berupa modul ADC 24 bit keluarannya menjadi data digital. Setiap beban penumpang yang masuk ditambahkan dan setiap beban penumpang yang turun dikurangkan. Ketika data beban penumpang telah mencapai maksimum, maka buzzer akan menyala dan pintu BIPOL akan menutup secara otomatis.
1.2 Perumusan Masalah
Berdasarkan latar belakang yang dipaparkan, timbul permasalahan :
1. BIPOL tidak memiliki sistem penedeteksi penumpang yang membuat pintu dibiarkan terbuka yang dapat membahayakan penumpang dalam bus
2. BIPOL tidak memiliki sistem pembatas penumpang yang menyebabkan seringnya muatan berlebih yang berdampak pada ketidaknyamanan penumpang
3. Muatan berlebih pada BIPOL menyebabkan kinerja dari operasi BIPOl mengalami penurunaan dan tidak sedikit BIPOL yang mengalami beberapa kerusakan pada sebagian titik di BIPOL
4. Penggunaan modul mikrokontroler sebagai pengolah data input dari jumlah mahasiwa yang masuk dan keluar dari bus
5. Penggunaan modul mikrokontroler sebagai penghasil data input dari pengukuran jumlah beban mahasiswa yang masuk dan keluar bus 6. Penggunaan modul mikrokontroler sebagai pengolah data input dari
sensor PIR
7. Menampilkan jumlah kuota penumpang yang tersisa dalam bus pada
LCD
8. Menampilkan indikator status BIPOL saat terjadi muatan berlebih berupa alarm
9. Pemanfaatan sensor Infra Merah sebagai pendeteksi jumlah penumpang yang masuk dan keluar bus
10. Pemanfaatan loadcell sebagai pengukuran dan pengambilan data beban penumpang yang masuk dan keluar bus
1.3 Pembatasan Masalah
1. Membuat instruksi pendeteksian sinyal masukan dari sensor PIR pada pintu masuk dan pintu keluar untuk mengaktifkan relay yang berguna untuk menjalankan sistem pneumatik
2. Membuat instruksi pendeteksian sinyal masukan dari sensor infra merah pada pintu keluar dan pintu masuk
3. Membuat instruksi penghitung maju dari sensor infra merah pada pintu masuk
4. Membuat instruksi penghitung mundur dari sensor infra merah pada pintu keluar
5. Membuat instruksi menampilkan perhitungan dari instruksi penghitung sensor infra merah pada LCD
6. Membuat instruksi pendeteksian sinyal masukan dari loadcell pa pintu keluar dan pintu masuk
7. Membuat instruksi penambahan data masukan dari loadcell pada pintu masuk
8. Membuat instruksi pengurangan data masukan dari loadcell pada pintu keluar
9. Membuat instuksi pembatas jumlah penumpang berdasarkan data masukkan loadcell
10. Membuat instruksi menampilkan data masukkan loadcell pada LCD
1.4 Tujuan
Merancang instruksi pendeteksi penumpang dan penghitung jumlah penumpang pada Bus Politeknik Negeri jakarta
1.5 Metode Penyelesaian Masalah
Metode penyelesaian masalah dalam pembuatan tugas akhir ini adalah : 1. Metode literatur
membaca dan mempelajari artikel ilmiah yang membahas tentang pengaplikasian sensor infra merah sebagai counter, pengaplikasian
loadcell sebagai pengukuran beban, instruksi on-off pada mikrokontroller
terhadap alarm indikator dan instruksi mikrokontroler terhadap solenoid
valve sebagai aktuator pada pintu bus.
2. Rancangbangun
Membuat program sistem pendeteksi penumpang berdasarkan sinyal input sensor PIR (Passive Infra Merah) dan program counter sistem pembatas penumpang berdasarkan pengukuran beban oleh loadcel sebagai counter jumlah beban penumpang.
3. Pengujian Sistem
a. Pengujian sensor infra merah sebagai counter penumpang masuk b. Pengujian loadcell sebagai pengukur beban dan pengambilan data
beban penumpang
c. Pengujian sensor PIR (Passive Infra Merah) sebagai pendeteksi penumpang
4. Pengolahan data
Mengolah data pengujian data masukkandari loadcell berulang-ulang untuk mendapatkan hasil pengukuran yang akurat, mengolah data masukkan dari loadcell untuk membuat instruksi pembatas, dan mengolah data masukkan dari sensor infra merah untuk membuat instruksi pembatas penumpang
5. Pelaporan
Membuat laporan hasil pengujian tiap sensor berulang-ulang pada mikrokontroler sistem pendeteksi dan pembatas penumpang
BAB II
TINJAUAN PUSTAKA
Diperlukan sebuah solusi untuk mengatasi beberapa kerusakan dari sebagian titik di BIPOL dan ketidaknyamanan para pengguna BIPOL yang timbul dari banyaknya muatan. Sistem pendeteksi dan pembatas penumpang yang menggunakan sensor PIR, Loadcell dan sensor infra merah menjadi sebuah solusi untuk mengatasi masalah pada BIPOL.
2.1 Aplikasi Infra Merah Sensor sebagai counter
Inframerah (inframerah) ialah sinar elektromagnet yang panjang gelombangnya lebih daripada cahaya nampak yaitu di antara 700 nm dan 1mm. Sinar inframerah merupakan cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi cahaya
inframerah akan nampak pada spectrum elektromagnet dengan panjang
gelombang di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya inframerah akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa/dideteksi [Anonim, 2008].
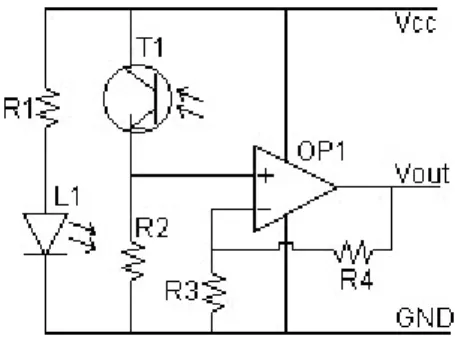
R3 dan R4 menentukan amplifikasi dari op amp, gain = 1 + R4/R3. Rasio yang tepat dapat ditentukan dengan menghubungkan rangkaian dan mengukur tegangan memasuki op amp dan mengetahui nilai ambang batas yang dibutuhkan di Vout. Vout = (1 + R4 / R3) Vin jadi hanya memecahkan rasio menggunakan nilai untuk Vout dan Vin.
Infra merah dalam sistem pembatas berfungsi sebagai pendeteksi adanya penumpang dan menghitung jumlah penumpang yang masuk dan keluar bus. Infra merah menlakukan instruksi penghitung berdasarkan perubahan logic dari 1 ke 0. Hasil perhitungan akan ditampilkan melalui LCD.
2.2 Loadcell
Loadcell merupakan tranduser yang digunakan untuk mengubah
deformasi tekanan menjadi sinyal listrik, yang biasanya terdiri dari empat buah strain gauge dengan variasi resistansi dalam konfigurasi jembatan wheatstone [Leny Limasari, 2009]. Jembatan wheatstone tersebut berada dalam kondisi seimbang ketika tidak diberi tekanan atau deformasi pada loadcell. Pada saat mendapat tekanan, maka resistansi dari strain gauge akan segera mengubah ketidakseimbangan dari rangkaian jembatan wheatstone tersebut. Loadcell ini memiliki kelebihan dengan output berupa sinyal listrik dan memiliki daya akurasi yang cukup tinggi sehingga mempermudah pengolahan data.
Gambar 2.2 KonfigurasiJembatan Wheatstone pada Loadcell [Leny Limasari, 2009]
Sinyal output terukur dalam satuan mikrovolt dan memerlukan penguatan oleh instrumen amplifier sebelum digunakan. Output
loadcell merupakan konversi perubahan hambatan terhadap gaya tekan
pada penampang loadcell.
A g m
P . (1.0)
dimana,
P = Tekanan dengan satuan newton/m 2 m = Massa dengan satuan kilogram
g = Gravitasi dengan satuan m/s2 (9,8 m/s2)
A = Luas penampang dengan satuan m2
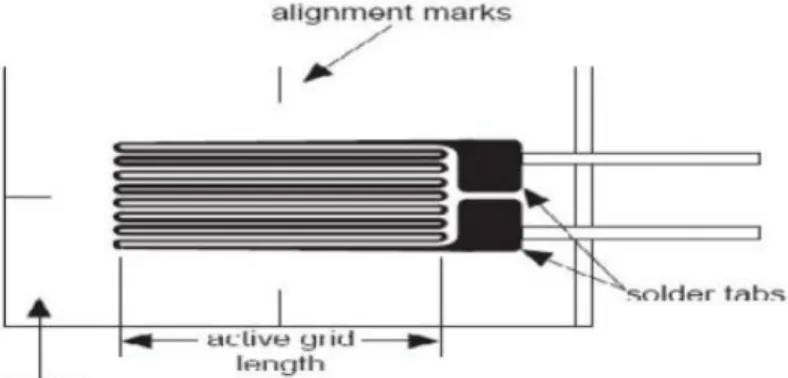
2.2.1 Strain Gauge
Strain gauge merupakan komponen elektronika yang dipakai untuk mengukur tekanan. Komponen ini ditemukan pertama kali oleh Edward E. Simmons pada tahun 1938, dalam bentuk foil logam yang
bersifat insulatif (isolasi) yang menempel pada benda yang akan diukur tekanannya. Jika tekanan pada benda berubah, maka foilnya akan meregang, dan tahanan listrik akan berubah. Perubahan tahanan listrik ini akan dimasukkan ke dalam rangkaian Jembatan Wheatstone. Bentuk strain gauge dapat dilihat seperti gambar 2.2.
Gambar 2.3 Strain Gauge
[Niswari Sulistiowati dan Melania Suweni Muntini, 2011]
Tekanan dari beban yang ditimbang menyebabkan tahanan dari kawa strain gauge berubah. Perubahan tahanannya sebanding dengan perubahan regangan [Thakkar, 2013].
Gambar 2.4 Strain Gauge Loadcell mengalami penekanan [Thakkar, 2013]
Perubahan resistansi berbanding lurus dengan perubahan panjang strain gauge, namun berbanding terbalik dengan perubahan luas penampangnya. Sesuai dengan persamaan 2.1
A R (2.1) dimana, R = Resistansi (Ω) = Masa jenis (Kg/ 3 m ) = Panjang (m) A = Luas penampang (m2) 2.2.2 Wheatstone Bridge
Rangkaian jembatan Wheatstone sering digunakan untuk mengukur regangan pada strain gauge [R. Masiulionis, V. Kvedaras, R. Kvedaras, 2011]. Regangan yang terjadi pada strain gauge hanya
akan mengakibatkan perubahan resistansi yang sangat kecil. Rangkaian jembatan Wheatstone digunakan untuk dapat mendeteksi perubahan resistansi secara akurat. Saat rangkaian jembatan
Wheatstone menghasilkan output tegangan, maka terjadi
ketidakseimangan nilai resistor pada lengan-lenganya. Sekecil apapun perubahan resistansi akibat regangan akan tetap terdeteksi selama lengan-lengan jembatan Wheatstone tidak mengalami keseimbangan.
2.2.3 HX711
Modul HX711 adalah sebuah modul terintegrasi dari “AVIA SEMICONDUCTOR”. Keluaran loadcell adalah beda potensial dari lengan-lengan jembatan wheatstone yang mengalami ketidakseimbangan. Data keluaran sensor loadcell merupakan data analog, sehingga perlu dikonversi menjadi data digital untuk diolah pada mikrokontroller. Modul HX711 mempunyai lebar data 24 bit. Lebar data 24 bit dibuat untuk pengkonversian data analog ke digital dan pengkondisian sinyal khusus untuk pengukuran berat, sensor berat, dan antarmuka langsung aplikasi kontrol industri dengan menggunakan rangkaian jembatan. Gambar 2.3 merupakan gambar modul HX711 [Rajesh, 2014].
Gambar 2.5 Rangkaian dalam modul HX711 [Avia Semiconductor, Datasheet]
(Modul HX711 memiliki dua channel (channel A dan channel B) yang dapat memberikaan penguatan sesuai dengan sinyal clock yang diberikan oleh mikrokontroler. Data output HX711, sinyal, dan penguatan tersebut dapat dilihat pada gambar 2.6
Gambar 2.6 Data output HX711, sinyal, dan penguatan [Avia Semiconductor, Datasheet]
2.3 Aplikasi Sensor PIR (Passive Infra Merah) sebagai pendeteksi adanya penumpang
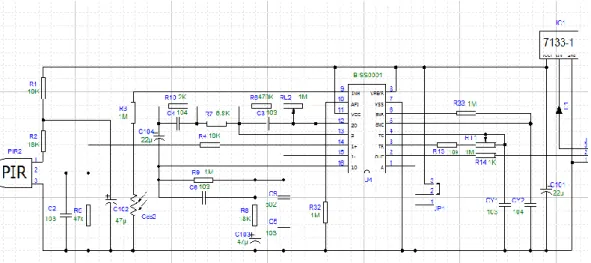
Penelitian sebelumnya dengan menggunakan sensor PIR sebagai detektor, telah dilakukan untuk merancang sistem buka-tutup pintu otomatis berbasis mikrokontroler [Ali, 2008]. Sensor PIR berfungsi mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.
Gambar 2.7 Rangkaian Sensor Passive Infra Merah (PIR)
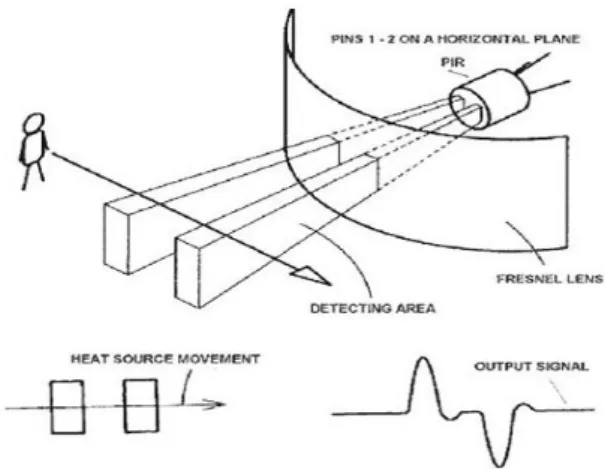
Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. Sensor PIR hanya akan mengeluarkan logika 1 dan 1. Saat sensor mendeteksi adanya infra merah maka akan mengeluarkan logic 1 dan jika tidak maka akan mengeluarkan logic 0.
Gambar 2.8 Area sensor PIR mendeteksi gelombang infra merah
Sensor PIR sebagai pendeteksi penumpang mendeteksi adanya pancaran sinar infra merah yang dipancarkan oleh penumpang yang berada di depan pintu bus. Ketika sensor PIR mendeteksi adanya pancaran sinar infra merah, maka sensor PIR akan mengeluarkan logic 1. Hasil keluaran sensor PIR digunakan sebagai trigger untuk mengaktifkan coil pada relay 24Vdc untuk mensupply daya guna mengaktifkan solenoid valve. Solenoid valve aktif membuka katup mengalirkan angina ke pneumatik dan pintu BIPOL membuka.
2.4 Mikrokontroller ATMega32
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukkan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus. Sederhananya, cara kerja mikrokontroler sebenarnya hanya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untukmengontrol peralatan elektronik, yangmenekankan efisiensi dan efektifitas biaya
Gambar 2.9 Konfigurasi PIN ATMega32 [Datasheet ATMega32]
Mikrokontroler AVR ATmega32 adalah salah satu dari keluarga ATmega. Memiliki memori flash 32k dan 32 jalur input output, serta dilengkapi dengan ADC 8 kanal dengan resolusi 10-bit dan 4 kanal PWM [Winoto, Ardi. 2009]. Fitur yang terdapat pada mikro chip
ATmega32 ini berfungsi sebagai pengkonversi nilai analog ke digital, karena nilai masukan atau keluaran pada ATmega32 menggunakan logika input-output digital yakni 0/1 (high / low).
BAB III
PERANCANGAN DAN REALISASI
3.1 Perancangan Alat dan Program Aplikasi
3.1.1 Perancangan Alat 3.1.1.1 Deskripsi Alat
Nama Alat : Sistem Pendeteksi dan Pembatas
Penumpang pada Bus Politeknik Negeri Jakarta
Fungsi Sistem : Membatasi dan mengantisipasi
kelebihan muatan penumpang pada BIPOL
Nama Sub-sistem : Pemrograman Sistem Pendeteksi dan
Pembatas Penumpang pada Bus
Politeknik Negeri Jakarta
Fungsi Sub-sistem : Membuat instruksi sistem dan
menjalankan sistem 3.1.1.2 Cara Kerja Alat
Sistem pendeteksi penumpang merupakan suatu sistem yang mendeteksi ada atau tidaknya penumpang yang berdiri di depan pintu masuk atau pintu keluar BIPOL. Sistem ini mendeteksi keberadaan penumpang di depan pintu masuk atau pintu keluar BIPOL, penumpang yang akan menggunakan BIPOL harus berdiri di depan pintu masuk BIPOL agar pintu dapat terbuka secara otomatis dan penumpang dapat masuk kedalam BIPOL begitu juga sistem berlaku pada pintu keluar BIPOL. Berikut adalah cara kerja alat :
1. Sistem pendeteksi penumpang terdiri dari sensor PIR dan Sistem Pneumatik. Sinyal masukkan yang berasal dari sensor
PIR digunakan sebagai trigger untuk mengaktifkan relay yang
terhubung ke solenoid valve pada pintu keluar dan pintu masuk. Saat sensor PIR mendeteksi adanya penumpang di depan pintu, sinyal masukkan dari sensor PIR yang berupa
logic 1 (high) digunakan sebagai trigger untuk mengaktifkan coil pada relay sebesar 24 volt yang berfungsi sebagai input
untuk kedua solenoid valve dan kran pada kompressor.
2. Sistem pembatas penumpang merupakan suatu sistem yang membatasi jumlah penumpang yang ada dalam BIPOL. Sistem ini terdiri dari dua instruksi, yaitu instruksi penghitung jumlah penumpang yang masuk dan keluar BIPOL dan instruksi penghitung jumlah beban setiap penumpang yang masuk dan keluar BIPOL.
3. Instruksi penghitung jumlah penumpang merupakan instruksi penghitung jumlah penumpang yang masuk dan keluar bus berdasarkan perubahan logic dari sinyal infra merah dari logic 1 (High) ke logic 0 (Low). Setiap penumpang yang masuk dan keluar BIPOL akan dihitung dan ditampilkan melalui indikator yang berupa LCD.
4. Bila jumlah penumpang telah mencapai jumlah maksimum muatan bus maka alarn akan menyala dan pintu akan menutup secara otomatis.
5. Instruksi penghitung jumlah beban penumpang merupakan instruksi penghitung jumlah beban setiap penumpang yang keluar dan masuk BIPOL dengan mengukur berat setiap penumpang menggunakan loadcell. Data keluaran dari
loadcell yang berupa analog dikonversi oleh modul HX711
yang berupa modul ADC 24 bit keluarannya menjadi data digital.
6. Setiap beban penumpang yang masuk ditambahkan 7. setiap beban penumpang yang turun dikurangkan
8. Ketika data beban penumpang telah mencapai maksimum, maka alarm akan menyala dan pintu BIPOL akan menutup scara otomatis.
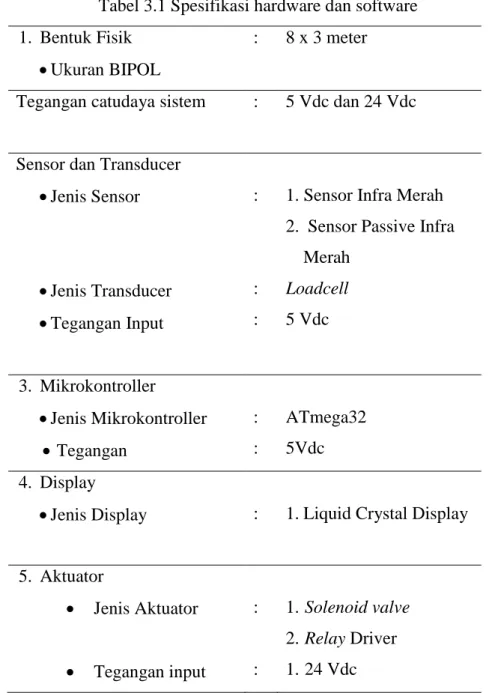
3.1.1.3 Spesifikasi Alat
Tabel 3.1 Spesifikasi hardware dan software 1. Bentuk Fisik
Ukuran BIPOL
: 8 x 3 meter
Tegangan catudaya sistem : 5 Vdc dan 24 Vdc
Sensor dan Transducer
Jenis Sensor Jenis Transducer Tegangan Input : : :
1. Sensor Infra Merah 2. Sensor Passive Infra
Merah Loadcell 5 Vdc 3. Mikrokontroller Jenis Mikrokontroller Tegangan : : ATmega32 5Vdc 4. Display
Jenis Display : 1. Liquid Crystal Display
5. Aktuator Jenis Aktuator Tegangan input : : 1. Solenoid valve 2. Relay Driver 1. 24 Vdc
2. 5 Vdc
6. Software : 1. CV AVR
3.1.2 Deskripsi Program Aplikasi
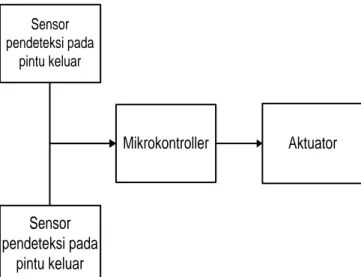
Program sistem pendeteksi penumpang melakukan instruksi pendeteksian sinar infra merah yang dipancarkan oleh gerak manusia. Sinyal keluaran sensor PIR diolah oleh mikrokontroller untuk mengaktifkan relay 24Vdc yang berfungsi sebagai tegangan input bagi
solenoid valve untuk menggerakkan pneumatik yang dipasang pada
pintu keluar/masuk bus. Sensor pendeteksi pada pintu keluar Sensor pendeteksi pada pintu keluar Mikrokontroller Aktuator
Gambar 3.1 Diagram Blok Sistem Pendeteksi Penumpang
Program sistem pembatas penumpang melakukan dua instruksi penghitung jumlah penumpang yang masuk dan keluar berdasarkan perubahan logic keluaran sensor infra merah dari logic 1 ke logic 0 dan instruksi pengambilan berat badan setiap penumpang menggunakan
loadcell (timbangan digital) dimana setiap data hasil pengambilan
diakumulasikan lalu disimpan dalam memori.
Instruksi penghitung jumlah penumpang menghitung setiap penumpang yang masuk dan keluar dari bus. Bila hitungan telah
mencapai nilai maksimum kapasitas penumpang dalam bus, maka mikrokontroller menginstruksikan alarm menyala dan memberikan
trigger bagi relay 24 Vdc untuk menonaktifkan solenoid valve yang
terhubung ke silinder pneumatik.
Transducer penimbang beban
pada pintu keluar Transducer penimbang beban
pada pintu keluar
Mikrokontroller
Sensor penghitung pada pintu keluar
Sensor penghitung pada pintu masuk
Indikator Tampilan
Front Panel Indikator suara
3.1.2 Cara Kerja Program Aplikasi
Program Sistem Pendeteksi dan Pembatas Penumpang
START
INISIALISASI PORT INPUT DAN OUTPUT
INISIALISASI TIMER0 DAN TIMER2 APAKAH SENSOR PIR MENDETEKSI ? APAKAH BERAT LOADCELL PINTU BELAKANG >10?
RELAY MASUK AKTIF
SILINDER PNEUMATIK MEMBUKA PINTU
RELAY KELUAR AKTIF
SILINDER PNEUMATIK MEMBUKA PINTU A B Ya Tidak
Gambar 3.3 Main Program Sistem Pendeteksi dan Pembatas Penumpang pada Bus Politeknik Negeri Jakarta
A B
SENSOR INFRA MERAH PINTU MASUK MENGHITUNG JUMLAH PENUMPANG YANG MASUK
LOADCELL PINTU MASUK MENGHITUNG MASSA PENUMPANG YANG MASUK
PINTU MENUTUP SETELAH 30 DETIK DAN JUMLAH DITAMPILKAN PADA LCD APAKAH BERAT TOTAL > 350 DAN JUMLAH PENUMPANG > 5 BUZZER BUNYI PINTU MENUTUP
SENSOR INFRA MERAH PINTU MASUK MENGHITUNG JUMLAH PENUMPANG YANG KELUAR
LOADCELL PINTU MASUK MENGHITUNG MASSA PENUMPANG YANG KELUAR
PINTU MENUTUP SETELAH 30 DETIK DAN JUMLAH DITAMPILKAN PADA LCD
Gambar 3.4 Sub Program Sistem Pendeteksi dan Pembatas Penumpang pada Bus Politeknik Negeri Jakarta
3.1.3 Rancangan Program Aplikasi
+Mengirimkan data dari mikrokontrollerke LabVIEW() -Komunikasi Serial : int
Database
Interface
+Mengendalikan sistem() -PIR mendeteksi : bool -Infra merah mendeteksi : bool -Loadcell : float
-Kendali relay : bool
Mikrokontroller
+Menimbang massa penumpang() -Massa Penumpang : float
Loadcell
+Menimbang massa penumpang yang masuk() -Massa penumpang : float
Loadcell pintu masuk
+Menimbang massa penumpang yang keluar() -Massa penumpang : float
Loadcell pintu keluar
+Menghitung jumlah penumpang() : <unspecified> -Counter : int
Sensor Infra merah
+Menghitung dan menjumlah penumpang yang masuk () -counter up : int
Sensor Infra merah pada pintu masuk
+Menghitung dan mengurangi jumlah penumpang yang keluar bus() -counter down : int
Sensor infra merah pada pintu keluar
Interface1 Interface2 Interface3 End1 End2 End3 End4 End5 End6 End7 End8
+Menampilkan massa total penumpang() +Menampilkan jumlah orang di dalam bus() -Massa Total : string
-Jumlah penumpang : string
LCD
End9
End10 Interface5
Gambar 3.5 Rancangan program sistem pembatas penumpang pada Bus Politeknik Negeri Jakarta
+Mengendalikan sistem() -PIR mendeteksi : bool -Infra merah mendeteksi : bool -Loadcell : float
-Kendali relay : bool Mikrokontroller
+Menghitung jumlah penumpang() : <unspecified> -Counter : int
Sensor PIR
+mendeteksi keberadaan penumpang() -mendeteksi : bool
Sensor Infra merah pada pintu masuk
Interface3
End5 End6
+Menampilkan massa total penumpang() +Menampilkan jumlah orang di dalam bus() -Massa Total : string
-Jumlah penumpang : string LCD
End9
End10 Interface5
+Menyalurkan supply ke solenoid() -Kendali coil relay : bool
Relay Driver -End1
*
-End2 *
Gambar 3.6 Rancangan program sistem pendeteksi penumpang pada Bus Politeknik Negeri Jakarta
3.2 Realisasi Program Aplikasi
Algoritma dan Pseudo Code Program Aplikasi Sistem Pendeteksi dan Pembatas Penumpang pada Bus Politeknik Negeri Jakarta :
Algoritma Pseudo Code
1. Menginisialisasikan Port Input dan Output pada Mikrokontroller
#define
Inisialisasi port SCK loadcell pintu masuk
Inisialisasi port Data loadcell pintu masuk
Inisialisasi port SCK loadcell pintu keluar
Inisialisasi port Data loadcell pintu keluar
Mendefinisikan logic high sama dengan 1
Mendefinisikan logic low sama dengan 0
Inisialisasi port input sensor PIR pintu masuk
Inisialisasi port input infra merah pada pintu masuk
Inisialisasi port input infra merah pada pintu keluar
Inisialisasi port ouput relay pada pintu masuk
Inisialisasi port ouput relay pada pintu keluar
Inisialisasi port ouput buzzer
PORTA.1 #define MASUK_DT PINA.0 #define KELUAR_SCK PORTA.3 #define KELUAR_DT PINA.2 #define HIGH 1 #define LOW 0 #define PIR PINC.0 #define IR_M PINC.1 #define IR_K PINC.2 #define RELAY_MASUK PORTB.1 #define RELAY_KELUAR PORTB.2 #define BUZZER PORTB.0
2. Mendapatkan nilai data digital massa penumpang dan menambahkan data
massa setiap penumpang yang
masuk yang bekerja pada Timer0
Berat yang akan ditampilkan
TCNT0=0; BM=scan_MASUK() ; berat_masuk=(float)B M*0.30851; //berat loadcell sesungguhnya dibagi
sesungguhnya dibagi dengan pembilang yang dihitung dengan perbandingan nilai massa yang real dengan yang terukur oleh loadcell sebesar 0,30851
Mendefinisian BM1 sama dengan berat masuk atau berat yang asli yang akan ditampilkan
Mendefinisian BM2 sama dengan berat masuk atau berat yang asliyang akan ditampilkan
Data berat masuk akan ditambahkan bila BM1 lebih besar dari 1 dan BM1 sam dengan BM2
Berat total yang merupakan hasil penjumlahan data berat total awal ditambah BM2
Bila berat masuk terukur sama dengan atau kurang dari 10 maka proses berhenti
dengan berat manusia sesungguhnya
BM1=berat_masuk; //BM1 = berat masuk
manusia yang real diukur loadcell delay_ms(100);
BM2=berat_masuk; //BM2 = berat masuk
manusia yang real diukur loadcell count++; if(BM1>1&&BM1== BM2) //bila berat BM1 lebih besar dari 1 dan BM1 = BM2
{
berat_total=berat_tota l+BM2;
//berat total = berat total + BM2 yang telah disamakan sama BM1 while(1) { if(berat_masuk<=10) break;
//bila berat masuk kurang dari 10 maka berhenti
} } 3. Sistem akan membunyikan buzzer
dan menutup pintu apabila jumlah orang dalam bus lebih dari 5 dan massa atau berat total yang terukur lebih dari 350 kg if(berat_total>=350||c ount>=5) {BUZZER=1;RELAY _MASUK=0;}
dari 350kg dan jumlah orang lebih dari 5 buzzer menyala dan relay NC menutup silinder 4.Mendapatkan nilai data digital massa
penumpang dan menambahkan data massa setiap penumpang yang keluar yang bekerja pada Timer2
Berat yang akan ditampilkan
sesungguhnya dibagi dengan
pembilang yang dihitung dengan perbandingan nilai massa yang real dengan yang terukur oleh loadcell sebesar 0,30851
Mendefinisian BK1 sama dengan berat keluar atau berat yang asli yang akan ditampilkan
Mendefinisian BK2 sama dengan berat keluar atau berat yang asliyang akan ditampilkan
Data berat keluar akan dikurangkan bila BK1 lebih besar dari 1 dan BK1 sam dengan BK2
Berat total yang merupakan hasil penjumlahan data berat total awal
ditambah BK2 dan akan
dikurangkan
Bila berat masuk terukur sama dengan atau kurang dari 10 maka
TCNT2=0; BK=scan_KELUAR( ); berat_keluar=(float)B K*0.30851; BK1=berat_keluar; delay_ms(100); BK2=berat_keluar; count++; if(BK1>1&&BK1== BK2) { berat_total=berat_tota l-BK2; while(1) { if(berat_keluar<=10) break; } }
proses berhenti }
5.Sensor PIR yang mendeteksi
keberadaan penumpang akan
memberikan trigger bagi relay
Bila loadcell mengukur beban lebih dari 10 maka relay keluar aktif dan membuka pintu dengan aktifnya pneumatik
Bila sensor PIR mendeteksi
keberadaan penumpang dan berat total dalam bus sama dengan 0 maka program menuju ke x if(PIR==1)break; if(berat_keluar>=10) break; } count=0; if(berat_total==0)got o x; RELAY_KELUAR=1;
6.Sensor Infra merah akan menghitung mengurangi jumlah penumpang bila mendapat logic 0 while(1) { count++; delay_ms(10); if(IR_K==0) { count_org--;
7. X merupakan relay masuk yang mendapat logic 1, sensor infra merah
menghitung orang dengan
menjumlahkan hitungan RELAY_KELUAR=0; x: count=0; RELAY_MASUK=1; while(1) { count++; delay_ms(10); if(IR_M==0)
{
count_org++; 8.Menampilkan data hasil pengukuran
berat total dan jumlah penumpang ke
LCD if(count==3000)break ; sprintf(buff,"JUMLA H ORANG = %3d",count_org); LCD_gotoxy(0,1); LCD_puts(buff); sprintf(buff,"TOTAL BERAT = %3d",berat_total); LCD_gotoxy(0,2); LCD_puts(buff);
BAB IV PEMBAHASAN
4.1 Pengujian
Pengujian sistem pendeteksi penumpang dapat dilakukan dengan memvariasikan jarak pendeteksian penumpang dan sudut penumpang berdiri terhadap sensor PIR. Indikator keberhasilan pendeteksian bergantung pada sensitivitas sensor PIR. Keberhasilan pendeteksian sensor PIR adalah terbukanya pintu bus yang digerakan oleh system pneumatik yang mendapat tegangan dari sumber melalui relay 24Vdc yang aktif coilnya mendapatkan
trigger dari keluaran sensor PIR.
Pengujian sistem pembatas jumlah penumpang dapat dilakukan dengan memvariasikan data berat penumpang yang diukur oleh loadcell dan memvariasikan jarak pendeteksian penumpang terhadap sensor infra merah.
4.1.1 Deskripsi Pengujian
a. Tujuan Pengujian
1. Mengukur jarak penumpang terhadap sensor PIR yang mampu terdeteksi
2. Mengukur jarak penumpang yang masuk dan keluar terhadap sensor infra merah yang mampu terdeteksi dan melakukan instruksi penghitung
3. Mengukur berat penumpang yang masuk dan keluar bus menggunakan loadcell
b. Target Pengujian
1. Sensor PIR dapat mendeteksi penumpang dengan jarak 2-3 meter
2. Sensor Infra merah dapat mendeteksi penumpang dengan jarak 20 cm dan meng-counter jumlah penumpang 3. Loadcell dapat mengukur beban setiap penumpang yang
masuk dan keluar
c. Waktu dan Tempat Pengujian
Lokasi : Bengkel Elektronika Industri
Tanggal : 5 Agustus 2015
Waktu : 13.00
Pelaksana : 1. Ranu Larson Brahmantyo
2. Mukhlis Maulana 3. Nurul Amalia
4.1.2 Prosedur Pengujian
4.1.2.1 Pengujian jarak pendeteksian penumpang terhadap sensor
PIR
a. Konfigurasi pengujian jarak pendeteksian penumpang terhadap sensor PIR
Gambar 4.1 Konfigurasi pengujian jarak dan sudut pendeteksian penumpang terhadap sensor PIR
Sensor PIR Mikrokontroller ATMega32
Relay Driver
Manusia Solenoid valve
b. Daftar alat dan bahan pengujian jarak dan sudut pendeteksian penumpang terhadap sensor PIR
Tabel 4.1 Daftar alat dan bahan pengujian dan sudut pendeteksian penumpang terhadap sensor PIR
No Nama Jenis Fungsi
1 Manusia - Objek yang
memancarkan sinar infra merah yang akan dideteksi oleh sensor PIR
2 Sensor PIR HC- SR502 Mendeteksi pancaran
sinar infra merah
3 Minimum
System ATMega32
AVR module ATmega32
Instruksi on-off pada
relay driver berdasarkan output sensor PIR untuk mengaktifkan
solenoid valve
4 Relay Driver 24Vdc output , 5 Vdc input
Saklar on off yang
terhubung ke pneumatik dari mikrokontroller 5 Solenoid valve SMC 5/2 Double Acting : Single Rod
supply angin dari
kompressor untuk pneumatik 6 Silinder Pneumatik TPC-01 Menutup/membuka pintu bus
c. Langkah-langkah pengujian jarak dan sudut pendeteksian penumpang terhadap sensor PIR
1. Hubungkan pin Vcc dan Ground ke pin Vcc dan Ground pada mikrokontroller
2. Hubungkan pin Out PIR pada pintu masuk ke pin A.0 dan pin Out PIR pada pintu keluar ke pin A.2 mikrokontroller 3. Hubungkan coil input relay driver 24Vdc dengan pinA. 1
dan hubungkan coil input relay driver 24Vdc dengan pinA. 3 mikrokontroller
4. Hubungkan supply input relay driver 24Vdc dengan power supply dari accu bus sebesar 24V
5. Hubungkan modul mikrokontroller dengan power supply 6. Mengunduh program pendeteksian sensor PIR
7. Objek berupa manusia didekatkan dengan sensor PIR dengan jarak 10cm, 20cm, 30cm, 40cm, 50cm an a a su ut ari -
4.1.2.2 Pengujian jarak pendeteksian penumpang terhadap sensor infra merah
a. Konfigurasi pengujian jarak pendeteksian penumpang terhadap sensor infra merah
Gambar 4.2 Konfigurasi pengujian jarak pendeteksian penumpang terhadap sensor infra merah
Sensor IR Mikrokontroller ATMega32
Manusia
b. Daftar alat dan bahan pengujian jarak pendeteksian penumpang terhadap sensor infra merah
Tabel 4.2 Daftar alat dan bahan pengujian jarak pendeteksian penumpang terhadap sensor infra merah
No Nama Jenis Fungsi
1 Manusia - Objek yang akan dideteksi
keberadaannya oleh sensor infra merah
2 Modul Sensor
infra merah
YL-63 Mendeteksi adanya
manusia 3 Minimum System ATMega32 AVR module ATmega32 Instruksi counter berdasarkan perubahan
keluaran sensor infra merah dari logic 1 ke 0
4 LCD Botech Menampilkan jumlah
penumpang dalam bus
c. Langkah-langkah pengujian jarak pendeteksian penumpang terhadap sensor infra merah
1. Hubungkan pin Vcc dan Ground ke pin Vcc dan Ground pada mikrokontroller
2. Hubungkan pin Out infra merah pada pintu masuk ke pin A.0 pada pintu keluar ke pin A.2 mikrokontroller
3. Hubungkan minimum sistem dengan PC menggunakan komunikasi serial RS 232
4. Hubungkan modul mikrokontroller dengan power supply 5. Mengunduh program pendeteksian sensor infra merah
6. Mengekskusi program pengambilan data pada LCD 7. Objek berupa manusia didekatkan dengan sensor infra
merah dengan jarak 2cm, 4cm, 6cm, 8cm, 10cm, 15cm, 20cm, 30cm
8. Catat hasil apakah sensor dapat mendeteksi dan melakukan counter yang ditampilkan pada LCD
4.1.2.3 Pengujian massa tiap penumpang yang masuk dan keluar menggunakan loadcell
a.Konfigurasi pengujian massa tiap penumpang yang masuk dan keluar menggunakan loadcell
Gambar 4.3 Konfigurasi pengujian massa tiap penumpang yang masuk dan keluar menggunakan loadcell
Timbangan Digital Loadcell Mikrokontroller ATMega32 LCD 4x20 Manusia
b. Daftar alat dan bahan pengujian massa setiap penumpang yang masuk dan keluar bus menggunakan loadcell
Tabel 4.3 Daftar alat dan bahan pengujian massa setiap
penumpang yang masuk dan keluar bus menggunakan
loadcell
No Nama Jenis Fungsi
1 Manusia - Objek yang akan
dideteksi keberadaannya oleh sensor infra merah
2 Timbangan digital Loadcell Lisa Half bridge resistance strain gauge Mendeteksi adanya manusia dengan memantulkan pancaran sinar infra merah
3 Minimum System ATMega32 AVR module ATmega32 + Serial RS232 Instruksi counter berdasarkan perubahan keluaran sensor infra merah dari logic 1 ke 0 4 LCD 4x20 LCD 4x20
Bogor
Technologies
Indikator tampilan berat penumpang yang masuk dan keluar
c. Langkah-langkah pengujian massa setiap penumpang yang masuk dan keluar bus menggunakan loadcell
1. Aktifkan sistem penimbang penumpang, sistem penimbang aktif jika LCD telah menyala
2. Penumpang menaiki bus melewati pintu depan. Lihat hasil pengukuran massa penumpang pada LCD
4. Ulangi prosedur 3, 4, dan 5 untuk melakukan pengukuran selanjutnya
5. Penumpang turun bus melewati pintu belakang. Lihat hasil pengukuran massa penumpang pada LCD
6. Catat hasil pengukuran yang terlihat pada LCD
4.1.3 Data Hasil Pengujian
4.1.3.1 Pengujian jarak pendeteksian penumpang terhadap sensor PIR
Tabel 4.4 Data hasil pengujian jarak pendeteksian penumpang terhadap sensor PIR
No Jarak Pendeteksian (cm) Logic High (1) Logic Low (0) Keterangan 1 25 1 - Terdeteksi 2 50 1 - Terdeteksi 3 100 1 - Terdeteksi 4 150 1 - Terdeteksi 5 200 1 - Terdeteksi 6 250 1 - Terdeteksi 7 300 1 - Terdeteksi 8 350 - 0 Tidak Terdeteksi 9 400 - 0 Tidak terdeteksi 10 450 - 0 Tidak terdeteksi
4.1.3.2 Pengujian jarak pendeteksian penumpang terhadap sensor infra merah
Tabel 4.5 Data hasil pengujian jarak pendeteksian penumpang terhadap sensor infra merah
No Jarak Pendeteksian (cm) Logic High (1) Logic Low (0) Keterangan 1 15 1 - Terdeteksi 2 16 1 - Terdeteksi 3 17 1 - Terdeteksi 4 18 1 - Terdeteksi 5 19 1 - Terdeteksi 6 20 1 - Terdeteksi 7 21 - 0 Terdeteksi 8 22 - 0 Terdeteksi 9 23 - 0 Tidak terdeteksi 10 24 - 0 Tidak terdeteksi
4.1.3.3 Pengujian massa tiap penumpang yang masuk dan keluar menggunakan loadcell
Tabel 4.6 Data Hasil Pengujian Pertambahan Berat Penumpang (Naik) No Koresponden Masuk Bus Berat Awal (Kg) Berat Total (Kg) 1 Ranu 57 57 2 Mukhlis 65 122 3 Teguh 62 184 4 Rifqi 66 250 5 Farid 85 335
6 Fitri 51 386
7 Iqbal 62 448
8 Merlin 47 495
9 Deswanto 58 553
10 Rizky 58 611
Tabel 4.7 Data Hasil pengujian Pengurangan Berat Penumpang (Turun)
No Berat Total Berat Koresponden yang terukur (Kg) Berat Total (Kg) 1 611 57 554 2 554 65 489 3 489 62 427 4 427 66 361 5 361 85 276 6 276 51 225 7 225 62 163 8 163 47 116 9 116 58 58 10 58 57 1
4.2 Analisis Data
4.2.1 Analisis pengujian jarak pendeteksian penumpang terhadap sensor PIR
Bedasarkan hasil yang didapat terlihat bahwa sensor PIR dapat mendeteksi penumpang dengan jarak deteksi minimal 0 cm dan jarak deteksi maksimal 300 cm. Diatas range jarak 300 cm, sensor PIR tidak dapat mendeteksi pancaran sinar gelombang infra merah yang dipancarkan penumpang. Sensitivitas sensor
PIR dapat diatur.
4.2.2 Analisis pengujian jarak pendeteksian penumpang terhadap sensor Infra merah
Gambar 4.4 Grafik hasil pengujian jarak pendeteksian penumpang terhadap sensor infra merah
1 2 3 4 5 6 7 8 9 10 Series1 15 16 17 18 19 20 21 22 23 24 Series2 1 1 1 1 1 1 0 0 0 0 0 0.2 0.4 0.6 0.8 1 Logi c H ig h (1)/ Low ( 0)
Data hasil pengujian jarak pendeteksian
penumpang terhadap sensor infra merah
Bedasarkan hasil yang didapat terlihat bahwa Sensor infra merah dapat mendeteksi penumpang dengan jarak deteksi minimal 0 cm dan jarak deteksi maksimal 20 cm hingga 25 cm. Diatas range jarak 25 cm, sensor infra merah menghasikan data yang ambigu antara logic high dan logic low. Namun, jarak deteksi penumpang memiliki jarak ideal sebesar ±10-20 cm
4.2.3 Analisis pengujian massa tiap penumpang yang masuk dan keluar menggunakan loadcell
Bedasarkan hasil pengujian dapat dilihat bahwa, berat penumpang saat masuk tidak selalu sama dengan data penumpang keluar. Terdapat selisih sekitar 1-2 kg saat penumpang menuruni bus. Hal ini dapat terjadi karena tekanan pada pijakan pertama yang penumpang pijakan berbeda dengan tekanan saat pada pijakan terakhir yang penumpang pijakan saat ingin menuruni bis. Penumpang yang berdiri dipijakan dengan terburu buru juga mempengaruhi data hasil uji karena loadcell membutuhkan waktu sekitar 1-2 detik untuk mendapatkan data yang akurat dalam mengukur beban.
Berat yang tidak sama antara berat yang terukur menggunakan loadcell dan berat sesungguhnya penumpang dikarenakan angka kalibrasi loadcell yang masih sedikit kurang presisi
BAB V PENUTUP
5.1 Kesimpulan
Berdasarkan hasil pengujian dan analisa hasil pengujian dari instruksi sistem pendeteksi dan pembatas jumlah penumpang pada bus Politeknik Negeri Jakarta dapat disimpulkan bahwa :
1. Sesnsor PIR dapat mendeteksi keberadaan penumpang dengan jarak minimal 0 cm dan maksimal ±300 cm 2. Sensor PIR hanya mendeteksi adanya penumpang
selama 3-4 detik, sehingga diperlukan instruksi untuk memastikan relay terus dalam kondisi aktif sebagai trigger untuk mengaktifkan solenoid valve
3. Sensor infra merah dapat mendeteksi dan menghitung penumpang yang masuk atau keluar bus dengan maksimal jarak ±20 cm
4. Perbedaan waktu respon loadcell dalam mengukur beban penumpang, angka kalibrasi loadcell dengan berat manusia, dan waktu diam penumpang saat menimbang dalam mengambil data mempengaruhi hasil data yang didapat
5.2 Saran
Untuk hasil pengukuran massa penumpang yang masuk dan keluar bus, lebih baik menggunakan Loadcell yang memiliki massa pengukuran berskala besar untuk mendapat data massa penumpang yang akurat dan stabil
DAFTAR PUSTAKA
Winoto, Ardi. 2009. Mikrokontroller AVR dan Pemrogramannya Dengan Bahasa C pada Win AVR. Informatika. Bandung.
Susanti, Yohana., Erwin Boenyamin Liem,. 2010. Sistem Penimbang Otomatis dengan Menggunakan Mikrokontroller ATmega16. Electrical Engineering Journal, 1(1), hal 41-52. ISSN 1979-2867.
Indrayana, M. 2010. Penentuan Jumlah Kenderaan Transjogja dengan Metode Transportasi. Jogja. Jurnal Optimasi Sistem Industri, Vol.9 No.2, Oktober 2010:53-58
M. Y. Butar-butar. 2008. Penggunaan Simulasi Untuk Pemecahan Masalah Tranportasi, Proceeding ISSN 1411(6286. Seminar Ilmiah Nasional Komputer dan Sistem Intelijen, Universitas Gunadarma, Depok,
Rukmana, Arief Ci ta In ra., Ab ul Ro’uf. 2 14. A likasi Sensor Loa Cell a a Purwarupa Sistem Sortir Barang. IJEIS, Vol.4, No.1. ISSN: 2088-3714. Sulistiowaty, Niswari., Melania Suweni Muntini. 2011. Karakterisasi dan
Kalibrasi Akuisisi Data pada Sensor Massa dengan Menggunakan ADC 16 Bit. Seminar Nasional Pascasarjana XI – ITS, Surabaya. ISBN No. 1.
![Gambar 2.2 KonfigurasiJembatan Wheatstone pada Loadcell [Leny Limasari, 2009]](https://thumb-ap.123doks.com/thumbv2/123dok/4476724.3245023/8.892.370.677.176.468/gambar-konfigurasijembatan-wheatstone-pada-loadcell-leny-limasari.webp)
![Gambar 2.4 Strain Gauge Loadcell mengalami penekanan [Thakkar, 2013]](https://thumb-ap.123doks.com/thumbv2/123dok/4476724.3245023/10.892.241.763.170.480/gambar-strain-gauge-loadcell-mengalami-penekanan-thakkar.webp)
![Gambar 2.5 Rangkaian dalam modul HX711 [Avia Semiconductor, Datasheet]](https://thumb-ap.123doks.com/thumbv2/123dok/4476724.3245023/12.892.240.730.180.477/gambar-rangkaian-modul-hx-avia-semiconductor-datasheet.webp)
![Gambar 2.9 Konfigurasi PIN ATMega32 [Datasheet ATMega32]](https://thumb-ap.123doks.com/thumbv2/123dok/4476724.3245023/15.892.376.681.171.527/gambar-konfigurasi-pin-atmega-datasheet-atmega.webp)