Modul Mekatronika
Bebas
146
0
0
Teks penuh
(2) 1.2 Transistor Daya Transistor daya adalah perangkat yang terdiri dari tiga lapis N-P-N atau P-N-P seperti ditunjukkan pada ganbar 1-1 dan 1-2. Prinsip kerjanya arus kolektor IC. yang. merupakan fungsi dan arus basis IB, perubahan pada arus basis akan mengakibatkan perubahan yang telah dikuatkan pada arus kolektor pada tegangan kolektor-emitor yang dikenakan padanya. Perbandingan kedua arus tersebut antara 15 sampai 100. Simbol yang sesuai dengan gambar 1-1b, karakteristik transistornya ditunjukkan pada gambar 1-4. dengan ragam yang sama untuk perangkat lain, tegangan dadal akan dicapai bila tegangan yang ditambahkan mencapai suatu batas. Tegangan balik kolektor-emitor yang dapat menyebabkan dadal pada gandengan basis-emitor pada level rendah misalnya 10 volt, disini transistor tidak dapat bekerja pada mode reverse. Dapat ditambahkan dioda secara seri untuk memperbesar kemampuan menahan tegangan balik (reverse). Pada gambar 1-2, ditunjukkan transistor P-N-P yang mempunyai karakteristik yang menyerupai transistor N-P-N, tapi arus dan tegangannya dalam arah kebalikannya.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 2.
(3) (a). (b). Gambar 1-1 : N-P-N Transistor (a) Struktur (b) Simbol dan Arah Arus. (a). (b). Gambar 1-2 : P-N-P Transistor (a) Struktur (b) Simbol. Elektronika Industri Oleh Jaja Kustija, M.Sc. 3.
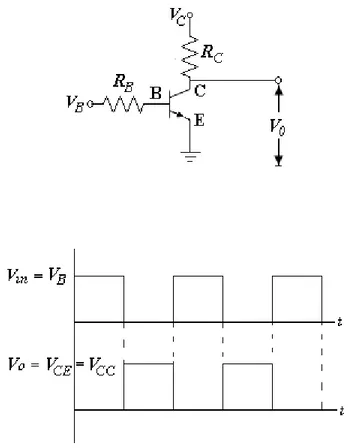
(4) Dengan memanfaatkan karakteristik Transistor emitor bersama, pada kondisi saturasi (jenuh) dan keadaan cut-off (mati) maka transistor dapat dijadikan saklar dengan pemutus dan penyambungnya berupa (tegangan pada basisnya).. Perhatikan rangkaian sebagai berikut :. Gambar 1-3. Rangkaian Transistor Mengotrol Beban. Persamaan transistor memberikan : IC = β IB …1) β = penguatan transistor dari persamaan di atas, jika IB = 0 maka IC = 0 (transistor tidak mengantarkan arus Ic, dengan kata lain posisi cut-off atau mati).. Dari rangkaian diatas diperoleh persamaan sebagai berikut :. IB IC. VB VCE RB VC VCE RC. Elektronika Industri Oleh Jaja Kustija, M.Sc. , disebut persamaan garis beban.. 4.
(5) Sedangkan karakteristik keluaran transistor dan garis beban adalah sebagai berikut :. Gambar 1-4. Karakteristik keluaran Transistor. Dari gambar diatas, pada kondisi saturasi (jenuh) menaikkan I B tidak dapat menaikkan IC. Selanjutnya, lihat IB5 ; IB6 menghasilkan IC yang sama dengan IC saturasi. Pada kondisi ini, diperoleh :. VCE IC. 0 (kecil) VCC RC. Artinya arus besar, tegangan menuju nol (0). Dapat dikatakan hambatan pada CE, menuju nol (sebagai saklar ON) jadi untuk membuat transistor berlaku sebagai saklar yang ON, kita memberikan tegangan VB yang mengakibatkan transistor saturasi. Sedang jika VB = 0 maka IB = 0, dan Ic = 0 , lihat pers 1). Maka pada kondisi ini transistor pada kondisi tidak menghantarkan arus Ic sama dengan kondisi saklar terbuka.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 5.
(6) Lihat gambar rangkaian berikut :. Analog dengan. Gambar 1-5. Analogi Transistor sebagai saklar posisi ON. Analog dengan. Gambar 1-6. Analogi Transistor sebagai saklar posisi OFF. Elektronika Industri Oleh Jaja Kustija, M.Sc. 6.
(7) Gambar 1-7. Hubungan antara Tegangan Input-Output dari Rangkaian Saklar Transistor. Elektronika Industri Oleh Jaja Kustija, M.Sc. 7.
(8) 1.3 Latihan soal 1. Jelaskan karakteristik dari transistor daya !. 2. Jelaskan bagaimana Transistor dapat berfungsi sebagai saklar !. 3. Diberikan rangkaian sebagai berikut :. Berikan analisa dari rangkaian tersebut dan gambarkan outputnya !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 8.
(9) Modul 2 Silicon Controlled Rectifier (SCR) Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Silicon Controlled Rectifier (SCR) Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan Silicon Rectifier Controlled (SCR). 2.1 Pendahuluan Silicon Controlled Rectifier (SCR) merupakan salah satu jenis semikonduktor daya yang paling penting dan telah digunakan secara ekstensif pada rangkaian elektronika industri. SCR biasanya digunakan sebagai saklar/bistabil, beroperasi antara keadaan non konduksi ke konduksi. Pada banyak aplikasi, SCR dapat diasumsikan sebagai saklar ideal aka tetapi dalam prakteknya SCR memiliki batasan dan karakteristik tertentu.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 9.
(10) 2.2 Silicon Controlled Rectifier (SCR) Silicon Controlled Rectifier (SCR) adalah perangkat elektronik yang dirancang agar dapat mengendalikan daya arus bolak-balik (AC) hingga 10 MW dengan rating arus sebesar 2000 A pada tegangan 1800 V. Adapun daerah frekuensi kerja SCR dapat mencapai sekitar 50 KHz. SCR dibuat dari bahan semikonduktor jenis silicon dengan pertimbangan kemampuan terhadap temperature dan daya yang tinggi. Tahanan dalam dinamis suatu SCR adalah sekitar 0.01 sampai 0.1 ohm sedangkan tahanan reversenya sekitar 100.000 ohm atau mungkin lebih. Struktur. P-N-P-N sederhana seperti pada SCR dapat dipandang sebagai dua. transistor N-P-N dan P-N-P yang dihubungkan membentuk pasangan feedback regeneratif seperti pada gambar di bawah ini :. (a). (b). Gambar 2-1 : P-N-P-N dua Transistor (SCR) (c) Struktur (d) Arah Arus. Keterangan : IB. : Arus basis. IC. : Arus collector. IA. : Arus anoda. IK. : Arus katoda. Ig. : Arus gate. Elektronika Industri Oleh Jaja Kustija, M.Sc. 10.
(11) Dari gambar 2-1, diperoleh : IB1 = (1-α1) IA – ICBO1….1) IC2 = α2 IK + ICBO2….….2) Dari gambar 2-1, terlihat bahwa : IB1 = IC2 (1-α1) IA – ICBO1 = α2 IK + ICBO2…..3) Juga terlihat bahwa : IK = Ig + IA, sehingga (1-α1) IA – ICBO1 = α2 (Ig + IA) + ICBO2 (1-(α1+ α2)) IA = α2 Ig + ICBO1 + ICBO2 atau :. IA. I ICBO1 ICBO2 1 ( 1 2). 2 g. Persamaan diatas menunjukkan feedback regeneratif SCR akan jalan apabila α 1+ α2 ≥ 1 Beberapa mekanisme menjalankan Thyristor : (1) Tegangan antara colektor dan emitor diperbesar, akhirnya akan tercapai keadaan dimana arus bocor dapat menghasilkan pembawa muatan yang lain, sehingga terjadi suatu breakdown avalanche (longsor). Mekanisme ini bisa digunkan pada dioda empat lapis seperti DIAC. (2) Perubahan tegangan Setiap sambungan P-N mempunyai kapasitansi. Makin luas sambungan maka makin besar kapasitansinya. Bila suatu fungsi tangga tiba-tiba dipasang antara colektor dan emitter, suatu arus pergi akan mengalir sebesar :. i. C. dv ; arus ini dapat membuat nilai loop gain G mendekati nilai satu, yang akan dt. menghantarkan thyristor. (3) Suhu Pada suhu tinggi arus bocor (arus saturasi) pada sambungan P-N silikon denagn panjaran mundur menjadi dua kali lipat dengan kenaikan suhu 8°C ini dapat membuat loop gain G mendekati satu dan menghantarkan.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 11.
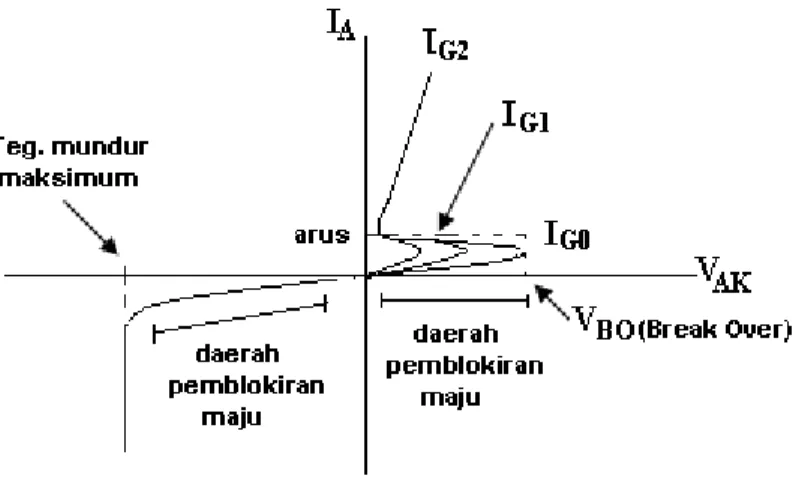
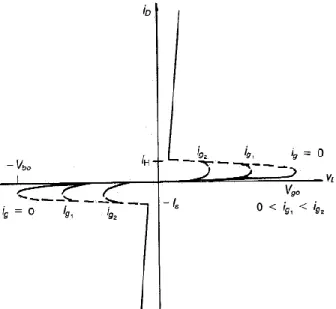
(12) (4) Mekanisme transistor Pada transistor pertambahan arus pada basis akan memperbesar arus colektor. Ini biasa digunakan untuk menghantarkan thyristor yang mempunyai gate, SCR menghantarkan dengan memasukkan arus pada gate P, sedangkan pada Complementary SCR (CSCR) digunakan gate N. (5) Cahaya Cahaya yang disinarkan pada SCR dapat melepaskan pasangan elektron dan holes. Cara trigger ini dilakukan pada Light Activited SCR (LA SCR) dan thyristor yang peka cahaya. Karakteristik V – I SCR : SCR dapat mengalirkan arus hanya pada satu arah yakni jika V A > VK serta bisa diatur sudut penyalaannya dengan mengatur tegangan gatenya.. Gambar 2-2. Karakteristik V – I SCR. Pada daerah pemblokiran maju, bila tegangan maju ditambah maka arus bocor hamper tidak berubah hingga pelipat gandaan pembawa muatan oleh adanya breakdown avalanche setelah keadaan dilampaui arus di dalam SCR yang mempunyai nilai cukup besar hingga loop gain = 1, pada keadaan ini SCR berkonduksi jika V A berada pada nilai tertentu, yang disebut arus bertahan (holding current). Bila arus anoda turun di bawah nilai arus bertahan SCR akan kembali pada pemblokiran maju. Pada keadaan pemblokiran mundur SCR berprilaku seperti dua dioda dipasang seri ( terpanjar mundur).. Elektronika Industri Oleh Jaja Kustija, M.Sc. 12.
(13) Pada keadaan VA > VK penambahan harga IG akan memperkecil daerah pemblokiran, untuk IG yang cukup besar bisa mengakibatkan SCR berperilaku seperti dioda terpanjar maju.. Perhatikan contoh berikut ini :. Gambar 2-3. Rangkaian untuk melindungi alat dari tegangan lebih.. Cara kerjanya : Jika Vi (DC) naik melebihi harga yang diijinkan maka Vab naik sehingga SCR berkonduksi dan arus yang melewati fuse akan besar sehingga fuse akan putus.. (6) Kontrol Fasa pada SCR SCR dapat dibuat agar berkonduksi pada bagian tertentu daripada siklus tegangan PLN. Rangkaian yang digunakan untuk ini ditunjukkan pada gambar dibawah ini :. (a). (b). Gambar 2-4. Rangkaian kontrol fasa SCR (a) Rangkaian (b) Bentuk gelombang. Elektronika Industri Oleh Jaja Kustija, M.Sc. 13.
(14) Harga rata-rata keluaran adalah :. 1 2. Vrata-rata. Vm sin t (d t ). Vm [cos t ] 2 Vm (cos cos ) 2 Vrata. rata. Vm (cos 2. 1). (tegangan keluaran bisa diatur sesuai dengan harga α) α berkisar dari 0° sampai dengan 180° untuk α = 0°, θ = 180°, α = 180°, θ = 0°. Bentuk rangkaian picu SCR dapat bermacam-macam. Suatu rangkaian picu yang menggunakan RC ditunjukkan pada gambar dibawah ini :. (a). (b). Gambar 2-4. Rangkaian picu SCR dengan RC (a) Rangkaian (b) Bentuk gelombang. (7) Bila anoda sedang negatif terhadap katoda, kapasitor C diisi muatan melalui D 1 hingga tegangan Vp. Dioda D1 mencegah arus gate negatif pada SCR, selanjutnya waktu anoda positif kapasitor C diisi melalui R dengan tetapan waktu (t = RC). Bila Vc melampaui tegangan ambang (VGT) maka SCR akan berkonduksi sehingga VAK. 0 , dengan mengatur R sudut konduksi dapat diatur dari 0° sampai 180°.. Rangkaian picu lain akan dibahas setelah mempelajari TRIAC.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 14.
(15) Beberapa aplikasi sederhana SCR :. V rata-rata. 1. Vm sin td ( t ). Em. Ac input. (1 cos ). Thyristor Phase Controlled Rectifier. Variable DC Voltage. DC Motor. LOAD. Velocity Tranducer. Control logic and trigger circuit. Elektronika Industri Oleh Jaja Kustija, M.Sc. 15.
(16) 2.3 Latihan soal 1. Jelaskan karakteristik hubungan antara tegangan dan arus pada SCR !. 2. Berikan dua aplikasi sederhana dalam penggunaan SCR ! (gambar beserta rangkaiannya). 3. Jelaskan cara kerja dari rangkaian untuk melindungi tegangan lebih !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 16.
(17) Modul 3 Unijunction Transistor (UJT) Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Unijunction Transistor (UJT) Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan Unijunction Transistor (UJT). 3.1 Pendahuluan Unijunction Transistor (UJT) adalah piranti elektronik yang tidak mempunyai elektroda kolektor sebagaimana transistor bipolar ataupun dioda rectifier, dan sebagai penggantinya ditambahkan sebuah elektoda basis sehingga piranti ini mempunyai dua basis dan sebuah emitter.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 17.
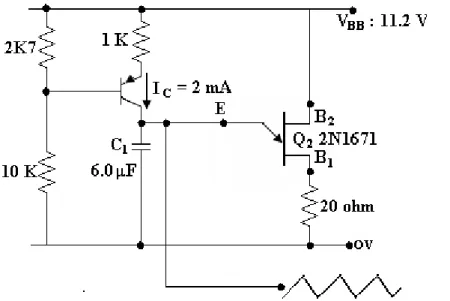
(18) 3.2 Unijunction Transistor (UJT) UJT atau transistor sambungan tunggal adalah suatu komponen aktif yang banyak digunakan untuk menghasilakan isyarat pulsa. Pulsa ini digunakan untuk kontrol pada instrumentasi. Susunan UJT ditunjukkan pada gambar berikut :. (a). (b). (c). Gambar 3.1. UJT (a) Struktur UJT (b) Rangkaian setara (c) Lambang UJT. Pada gambar 3.19 (b) hambatan R b1 dan Rb2 adalah hambatan setara di dalam UJT. Hambatan Rb1 dinyatakan variable oleh karena nilainya berubah dengan arus emitor I E. Karakteristik UJT dapat diuji dengan menggunakan rangkaian pada gambar 3.2.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 18.
(19) (a). (b). Gambar 3-2 : (a) Rangkaian untuk menguji UJT (b) Rangkaian setara. Jika dioda D ada dalam keadaaan tegangan mundur, arus I E. 0 dan hambatan Rb1. mempunyai nilai maksimum. Hambatan Rb1menyatakan nilai maksimum ini. Hambatan basis adalah Rb1 + Rb2dan dinyatakan sebagai RBB. Parameter UJT yang sering digunakan orang adalh yang disebut nisbah hambatan basis intrinsic (intrinsic stand-off ratio), yaitu :. Rb1 Rb1 Rb 2 Rb1 RBB Jika arus emitor IE = 0, maka :. Rb 2 VBB Rb1 Rb 2 VB ' .VBB VB '. Elektronika Industri Oleh Jaja Kustija, M.Sc. 19.
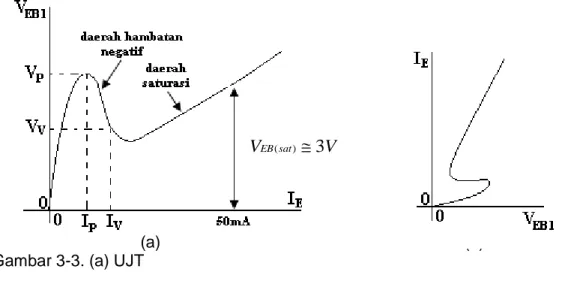
(20) Pada keadaan ini tegangan pada emitor :. VEO VB' + 0,6 V = η VBB + 0,6 V Dengan mengatur posisi pengusap pada pengusap pada potensiometer R V tegangan VE dapat diubah. Jika VE > VEO, dioda D mendapat tegangan maju. Akibatnya emitor akan memancarkan lubang ke dalam basis. Lubang ini ditolak oleh basis B2 yang mempunyai potensial positif, dan lubang akan terdorong masuk ke basis B1. Oleh karena jumlah muatan bebas dalam basis B 1 bertambah maka konduktivitas akan naik, atau hambatan Rb1 akan turun sedemikian rupa sehingga dengan kenaikan arus emitor IE tegangan emitor VE akan turun. Daerah nilai IE ini yang tegangannya VE turun jika arus IE naik disebut daerah hambatan negatif. Selanjutnya kenaikan arus emitor IE dengan VE akan bertambah sedikit. Daerah nilai arus ini disebut daerah penjenuhan.. Ciri UJT biasanya dinyatakan oleh grafik antara VBE dan IE seperti pada gambar 3-3 (a).. VEB ( sat ). (a) Gambar 3-3. (a) UJT. 3V. (b). (b) Ciri UJT dilukiskan dengan sumbu tegak menyatakan arus I E. Elektronika Industri Oleh Jaja Kustija, M.Sc. 20.
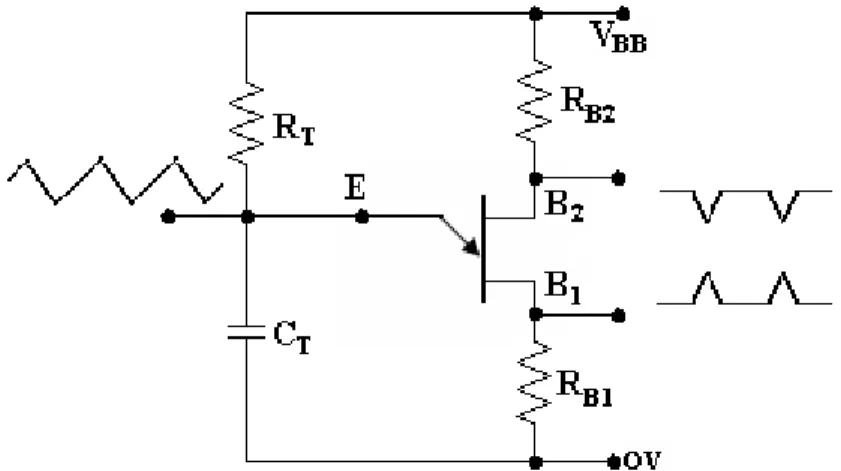
(21) Jika sumbu IE kita pasangkan vertikal lengkung, ciri UJT ini tampak mirip dengan lengkung ciri dioda dengan keadaan tegangan maju. Arus I P disebut arus puncak dan menyatakan arus emitor yang diperlukan untuk membuat agar UJT berkonduksi. Arus IV disebut arus lembah, yang menyatakan akhir daripada daerah hambatan negatif. Hambatan Rb, untuk daerah saturasi sekitar 50 ohm. Rangkaian untuk osilator relaksasi menggunakan UJT ditunjukkan pada gambar 3-4.. Pada mulanya kapasitor CT diisi muatan melalui RT. Setelah VE melebihi VEO = VB1 + η VB2B1 + 0.6 V Maka UJT akan berkonduksi. Hambatan V EB menjadi amat kecil sehingga arus akan mengalir dari VBB. Akibatnya pada titik B1 dan B2 akan terjadi denyut seperti pada gambar 3-4. Pada kapasitor akan terjadi Isyarat berupa gigi gergaji eksponensial oleh karena pengisian dan pengosongan kapasitor.. Gambar 3-4. Osilator relaksasi dengan UJT. Jika kita menginginkan isyarat berupa gigi gergaji linier, kapasitor C T kita isi muatan dengan menggunakan sumber arus tetap, seperti ditunjukkan pada gambar 3-5.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 21.
(22) Gambar 3-5. Cara untuk memperoleh isyarat keluaran linier. UJT banyak digunakan untuk mengatur SCR dan TRIAC, yaitu komponen semikonduktor yang berfungsi seperti tiration dengan menggunkan pulsa yang dihasilkan oleh basis pada UJT.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 22.
(23) 3.3 Latihan Soal 1. Gambarkan kurva karakteristik antara tegangan dan arus pada percobaan UJT? 2. Berapa nilai tegangan VE dan nilai arus IE pada saat UJT dalam keadaan On? 3. Berapa nilai tegangan VE dan nilai arus IE pada saat UJT dalam keadaan Off?. Elektronika Industri Oleh Jaja Kustija, M.Sc. 23.
(24) Modul 4 Dioda AC (DIAC) Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Dioda AC (DIAC) Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan Dioda AC (DIAC). 4.1 Pendahuluan DIAC merupakan salah satu anggota dari thyristor dan termasuk dalam jenis “Bidirectional Thyristor” yang juga dikenal sebagai “Bilateral Trigger Diode”. Istilah DIAC diambil dari “ Dioda AC”. DIAC mempunyai dua buah terminal dan dapat menghantar dari kedua arah jika tegangan breakovernya (VBB) terlampaui.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 24.
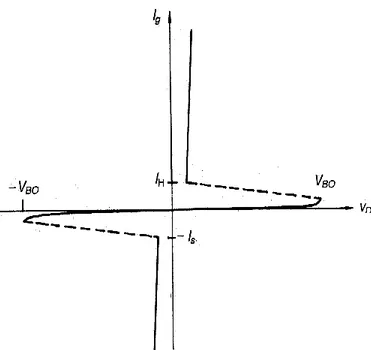
(25) 4.2 DIAC DIAC tersusun dari tiga lapis bahan semikonduktor walaupun beberapa buku mengatakan bahwa DIAC tersusun dari piranti lapis-empat, namun demikian pembuatnya menyatakan bahwa DIAC dibuat dari tiga lapis bahan semikonduktor. Tidak seperti halnya transistor, DIAC mempunyai tingkatan doping sekitar junctionnya yang sebanding. Gambar 4-1 menunjukkan ekivalen dan simbol DIAC :. (a). (b). (c). Gambar 4.1. DIAC (d) Ekivalen DIAC (e) DIAC sebagai susunan pengancing (Latch) (f) Simbol DIAC DIAC mempunyai impedansi yang tinggi bagi arus dalam dua arah, hingga bias DIAC melewati breakover arah mundurnya. Biasanya bias untuk DIAC agar mencapai breakover ini adalah antara 28 sampai 36 volt,namun demikian tergantung dari pada tipenya. Agar kita mengetahui prinsip kerja DIAC, maka kita nggap pemberian catu dayanya seperti terlihat pada gambar 4-1. Jika tegangan yang diberikan pada DIAC menyamai atau melebihi tegangan breakover, maka salah satu Latch akan menutup juga. DIAC adalah suatu komponen yang berkelakuan seperti dua buah thyristor yang dihubungkan saling bertolak belakang. Oleh karena itu DIAC mempunyai dua buah tegangan penyalaan. Tegangan penyalaan pertama berada pada tegangan maju (+Vbo) sedangkan yang kedua ada pada tegangan baliknya (-Vbo). karakteristik tegangan terhadap arus dapat dilihat pada Gambar 4-2.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 25.
(26) Gambar 4-2. Karakteristik DIAC. Dari kurva diatas kita dapat melihat bahwa DIAC selalu mempunyai karakteristik tahanan negatif yang secara terus menerus pada saat arus lebih besar daripada arus breakovernya.. DIAC. banyak. digunakan. sebagai pemicu. rangkaian. pengendali daya. yang. menggunakan TRIAC. Gambar 4-3, memperlihatkan salah satu contoh rangkaian yang memperlihatkan peran DIAC dalam rangkaian pengendali daya.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 26.
(27) Gambar 4-3. Aplikasi DIAC dalam rangkaian pengendali daya.. Jika tegangan pengisian kapasitor telah mencapai breakover DIAC, maka DIAC akan menghantar sehingga kapasitor akan menggosongkan muatannya melalui DIAC dan gate-TRIAC. Arus penggosongan kapasitor merupakan pulsa penyulut yang digunakan oleh TRIAC sebagai pengendali. Jika beban sebenarnya bersifat induktif, maka perlu dipasang rangkaian R dan C secara parallel terhadap TRIAC untuk mengatur komutasi TRIAC.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 27.
(28) 4.3 Latihan Soal 4. Mengapa DIAC mempunyai karakteristik tahanan negatif ?. 5. Jelaskan prinsip kerja dari DIAC !. 6. Buatlah salah satu rangkaian contoh penggunaan DIAC, jelaskan pula cara kerja dari rangkaian tersebut !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 28.
(29) Modul 5 Triode AC (TRIAC) Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Triode AC (TRIAC) Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penggunaannya Triode AC (TRIAC). 5.1 Pendahuluan Salah satu cara pengendalian daya arus bolak-balik secara penuh, dapat digunakan dua buah SCR yang terhubung secara paralel berlawanan (anti-paralel), seperti yang diperlihatkan pada gambar 5.1 berikut :. Gambar 5-1. Anti-Paralel SCR. Suatu piranti elektonik yang merupakan gabungan dari dua buah SCR adalah sebuah saklar elektronik dengan gerbang terkendali, yaitu TRIAC. TRIAC mempunyai tiga terminal (Triode-AC) atau dikenal sebagai Bidirectional Triode Thyristor. TRIAC mirip dengan SCR, namun TRIAC dapat menghantarkan arus dalam dua arah.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 29.
(30) 5.2 TRIAC TRIAC merupakan singkatan dari Triode Alternating Current Switch, yang berarti saklar egati untuk arus bolak-balik. TRIAC merupakan suatu komponen yang mempunyai susunan atas 5 lapisan bahan jenis P dan N dalam arah lain antara terminal T 1 dan T2 dan dapat menghantarkan dalam arah yang lain sebagaimana ditunjukkan secara jelas pada simbolnya. Secara elektris, TRIAC merupakan suatu komponen yang berkelakuan seperti dua buah SCR (Thyristor) yang digabungkan dalam hubungan negatif terbalik seperti ditunjukkan pada Gambar 5-2.. Gambar 5-2. Simbol TRIAC. TRIAC dapat dialihkan dalam kondisi hidup (on), baik melalui arus gate positif maupun arus gate. egative. Jika arus positif diinjeksikan saat T2 positif dan arus. diinjeksikan saat T1 positif, maka hasilnya sangat prakteknya, arus gate. egative. egative. (peka). Namun dalam. egative selalu digunakan seperti ditunjukkan pada Gambar 5-3. tentang karakteristik TRIAC berikut ini.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 30.
(31) Gambar 5-3. Karakteristik TRIAC TRIAC adalah piranti yang digunakan untuk mengontrol arus rata-rata yang mengalir ke suatu beban. TRIAC berbeda dengan SCR, dimana TRIAC ini dapat mengontrol arus dalam dua arah. Jika TRIAC sedang OFF, arus tidak dapat mengalir diantara terminal-terminal utamanya, atau dengan kata lain diumpamakan saklar terbuka. Jika TRIAC sedang ON, maka dengan tahanan yang rendah arus mengalir dari satu terminal ke terminal lainnya dengan arah aliran tergantung dari polaritas tegangan yang digunakan. Jika tegangan T2 positif, maka arus akan mengalirkan dari T1 ke T2 dan sebaliknya jika T1 positif, maka arus akan mengalir dari T 1 ke T2 dan dalam kondisi ini TRIAC diumpamakan sebagai saklar tertutup. Gambar 5-4 memperlihatkan suatu rangkaian yang terdiri dari sumber tegangan, TRIAC dan beban serta dilengkapi dengan suatu unit penyulut (trigger).. Elektronika Industri Oleh Jaja Kustija, M.Sc. 31.
(32) Gambar 5-4. Rangkaian Dasar Pengendali dengan TRIAC. Arus rata-rata yang dialirkan pada beban dapat bervariasi oleh adanya perubahan harga waktu setiap perioda ketika TRIAC tersebut ON. Jika porsi waktu yang kecil saat kondisi ON, maka arus rata-ratanya akan tinggi. Kondisi suatu TRIAC pada setiap perioda tidak dibatasi hingga 180°, dengan pengaturan picu dia dapat menghantarkan hingga 360° penuh. Tegangan gate untuk pemicu biasanya diberi notasi V GT, dan arus gate pemicu dinotasikan dengan IGT. Rangkaian 5-5 berikut merupakan rangkaian penyulutan (triggering) suatu TRIAC secara sederhana.. Gambar 5-5. Rangkaian picu TRIAC Selama setengah perioda negatif, muatan negatif akan beradapada plat bagian atas kapasitor dan jika tegangan yang berada pada kapasitor telah mencukupi, maka TRIAC akan ON.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 32.
(33) Kecepatan pengisian kapasitor diatur oleh hambatan R 2, dimana jika R2 bernilai besar, maka pengisiannya akan lambat sehingga terjadi penundaaan penyalaan yang panjang dan arus rata-ratanya kecil. Jika R2 bernilai besar, maka pengisian kapasitor akan cepat dan arus bebannya tinggi. Metode lain untuk pemicuan TRIAC digambarkan seperti pada gambar 5-6.. Gambar 5-6. DIAC sebagai pengendali TRIAC.. Rangkaian tersebut menggunakan DIAC sebagai pengendali picu. Prinsip kerja rangkaian tersebut adalah jika tegangan input berada pada setengah periode positif, maka kapasitor akan terisi muatan melebihi beban dan hambatan R. jika tegangan kapasitor mencapai tegangan breakover DIAC, maka kapasitor mulai mengosongkan muatan melalui DIAC ke gerbang (gate) TRIAC. Pulsa trigger TRIAC akan menghantarkan TRIAC pada setengah perioda tadi dan untuk setengah perioda berikutnya (negatif) prinsipnya sama. Sekali TRIAC dihidupkan, maka dia akan menghantarkan sepanjang arus yang mengalir melaluinya dipertahankan tetap. TRIAC tidak dapat dimatikan oleh arus balik layaknya suatu SCR. TRIAC dapat dimatikan dan kembali pada kondisi menghambat, ketika arus beban AC yang melewatinya berharga nol (0), sebelum setengah perioda lainnya digunakan. Faktor ini akan membatasi frekuensi respon yang dimiliki oleh TRIAC tersebut.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 33.
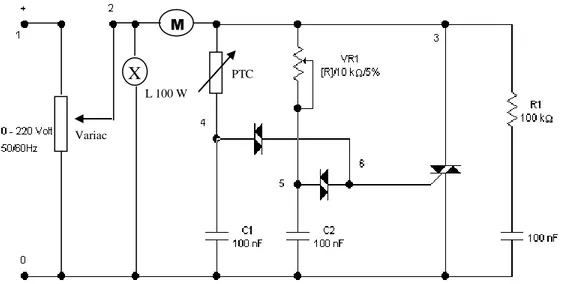
(34) Bagi beban-beban resistif, waktu yang tersedia guna mematikan suatu TRIAC akan lebih panjang dari titik ketika arus bebannya jatuh hingga waktu dimana tegangan balik mencapai nilai yang dapat menghasilkan arus latching yang dibutuhkan. Sedangkan bagi beban-beban induktif komutasinya akan lebih rumit lagi, dimana jika arus beban jatuh dan TRIAC berhenti menghantar, maka tegangan masih ada pad a piranti tersebut. Jika tegangannya muncul terlalu cepat, maka akibat yang dihasilkan oleh persambungan (junction) kapasitansi adalah tetap menghantarnya TRIAC tersebut. Untuk itu maka sering digunakan rangkaian pengaman yang dapat mengubah nilai Perubahan (rate of change) tegangan TRIAC.. Adapun pengaturan tegangan bolak-balik dengan menggunakan TRIAC ditunjukkan pada Gambar 5-7 berikut ini.. Gambar5-7. Rangkaian TRIAC dan Tegangan Outputnya Contoh penggunaan TRIAC : Pemakaian motor arus bolak-balik 1 fasa banyak digunakan dalam kehidupan sehari-hari dibandingkan dengan motor arus searah. Pengontrolan pun sekarang sudah banyak ragamnya dari mulai pengaturan putaran sampai pada proteksinya. Pengaturan putaran motor arus bolak-balik 1 fasa (motor pompa 1 fasa 125 watt) dengan mengatur tegangan masukan dan variasi nilai resistansi pada thermistor. Seperti pada Gambar 5-8 di bawah ini. Elektronika Industri Oleh Jaja Kustija, M.Sc. 34.
(35) M. X. PTC L 100 W. Variac. Gambar 5-8. Rangkaian Kendali Motor 1 Fasa Rangkaian. di atas. bertujuan. mengatur putaran motor pompa. listrik. dengan. menggunakan TRIAC sebagai saklar yang menghubungkan sumber tegangan dengan beban (pompa). Pada rangkaian ini juga menggunakan thermistor jenis positive temperature coefecien (PTC). Seharusnya PTC ditempelkan pada rangka pompa, namun dalam simulasi ini PTC didekatkan pada sumber panas dari lampu pijar yang dapat diatur tegangannya menggunakan variac.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 35.
(36) 5.3 Latihan Soal 1. Jelaskan karakteristik dari TRIAC !. 2. Jelaskan perbedaan antara TRIAC dan SCR !. 3. Buatlah salah satu rangkaian contoh rangkaian pengaman yang dapat mengubah nilai Perubahan (rate of change) tegangan TRIAC !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 36.
(37) Modul 6 Penyearah Gelombang menggunakan SCR Hasil Pembelajaran : Mahasiswa dapat memahami dan mengidentifikasi penyearah gelombang menggunakan Silicon Controlled Rectifier (SCR) Tujuan Bagian ini memberikan informasi mengenai penerapan Silicon Rectifier Controlled (SCR) sebagai penyearah gelombang.. 6.1 Pendahuluan Penyearah gelombang menggunakan SCR disebut penearah terkendali, dimana merupakan penyearah yang sederhana, lebih murah dan efisien dari penyearah secara umum. Oleh karena, penyearah-penyarah ini mengkonversi dari tegangan AC ke DC, maka penyerah ini dikenal dengan konverter AC-DC. Konverter dapat diklasifikasikan pada dua tipe, bergantung pada suplai masukan : (1) Konverter satu fasa dan, (2) Konverter tiga fasa.setiap tipe terbagi lagi menjadi (a) Semikonverter ; (b) Konverter penuh dan ; (c) dual konverter. Semikonverter merupakan konverter satu kuadran dan hanya memiliki satu polaritas tegangan dan arus keluaran. Konverter penuh merupakan konverter dua kuadran yang dapat memiliki tegangan keluaran baik positf maupun negatif. Akan tetapi keluaran arus dari konverter hanya dapat berharga positif. Metode deret Fourier dapat diaplikasikan untuk menganalisis kinerja dari Konverter dengan fasa terkendali dengan beban RL. Akan tetapi untuk mempermudah analisa, beban induktif dapat diasumsikan cukup tinggi sehingga arus beban akan bersifat kontinue dan memiliki ripple yang diabaikan.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 37.
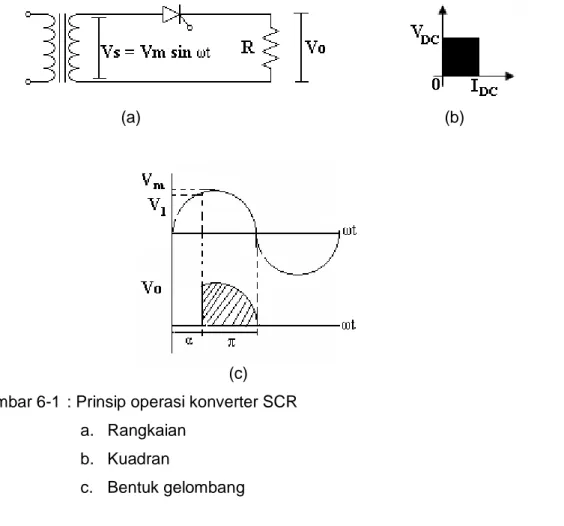
(38) 6.2 Penyearah Gelombang menggunakan SCR Perhatikan gambar 6-1 (a) dengan beban resistif. Selama setengah siklus positif dari tegangan masukan, anoda SCR relative positif terhadap katode sehingga SCR disebut terbias maju. Ketika SCR dinyalakan pada ωt = α, anode SCR akan negatif terhadap katodenya dan SCR akan disebut terbias mundur, dan dimatikan. Waktu setelah tegangan masukan mulai positif hingga SCR dinyalakan pada ωt = π disebut sudut delay atau sudut penyalaan α. Gambar 6-1 (b) memperlihatkan daerah operasi dari konverter, dengan tegangan dan arus keluaran memiliki polaritas tunggal. Gambar 6-1 (c) memperlihatkan gelombang tegangan masukan, tegangan keluaran, arus beban dan tegangan sepanjang SCR. Konverter ini tidak biasa digunakan pada aplikasi industri karena keluarannya memiliki ripple yang tinggi dan frekuensi ripple rendah. Jika fs merupakan frekuensi dari suplai masukan, komponen frekuensi terendah pada tegangan ripple keluaran akan fs juga.. (a). (b). (c) Gambar 6-1 : Prinsip operasi konverter SCR a. Rangkaian b. Kuadran c. Bentuk gelombang. Elektronika Industri Oleh Jaja Kustija, M.Sc. 38.
(39) Jika Vm merupakan puncak puncak tegngan masukan, tegangan keluaran rata-rata Vdc dapat diperoleh dari :. 1 2. Vdc. Vm sin t (d t ). Vm [cos t ] 2 Vm (cos cos ) 2 Vm (cos 2. Vdc. 1). dan Vdc dapat bervariasi dari. Vm. hingga nol dengan mengubah-ubah α antara ) hingga. π. Tegangan keluaran rata-rata akan menjadi maksimum bila α = 0 dan tegangan keluaran maksimum akan menjadi Vdc =. Vm. .. Tegangan keluaran rms diberikan oleh : Vrms = =. 1 2. Vm 2 Sin2 ωt dt 0. 1 Vm 2 sin 2 t dt 2 0. 1 1 Vm 2 1 cos 2 t dt 2 2 0. Elektronika Industri Oleh Jaja Kustija, M.Sc. 39.
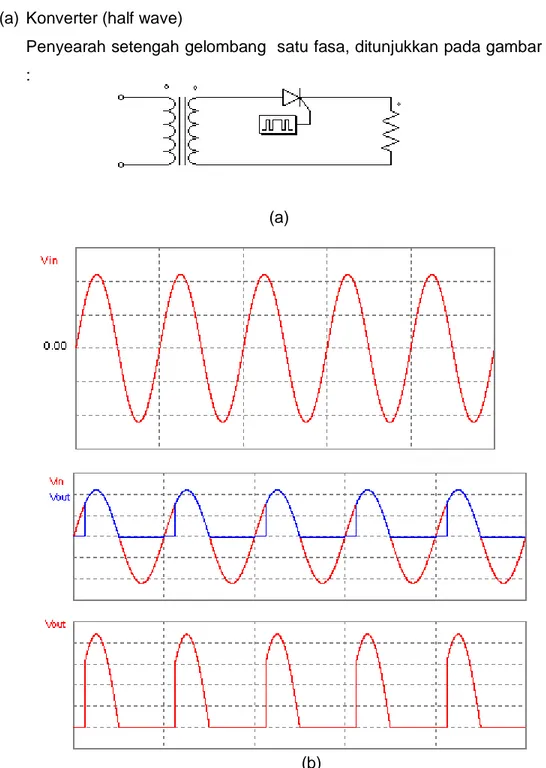
(40) 6.2.1 Penyearah gelombang satu fasa (a) Konverter (half wave) Penyearah setengah gelombang satu fasa, ditunjukkan pada gambar berikut :. (a). (b) Gambar 6-2 : Penyearah setengah gelombang satu fasa dengan SCR (a) Rangkaian (b) Bentuk gelombang. Elektronika Industri Oleh Jaja Kustija, M.Sc. 40.
(41) Tegangan rata-rata dapat diperoleh dari :. 1 2. VC. Vm sin( t. )dt. 0. Vm [cos t ]0 2 Vm (cos cos ) 2 α = sudut penyalaan. Vc RMS = =. 1 2. Vm 2 Sin2 ωt dt 0. 1 Vm 2 sin 2 t dt 2 0. 1 1 Vm 2 1 cos 2 t dt 2 2 0 Vm = 2 E, E adalah tegangan efektif. The force factor :. VcRMS Vc. FF. The Average Load Current : Ic =. Vc RL. Ic RMS =. VcRMS RL. The average load power : PC = VC IC The total load power : PT = VC RMS IC RMS Arus RMS yang melalui penyearah : Ia =. IcRMS 2. Elektronika Industri Oleh Jaja Kustija, M.Sc. 41.
(42) (b) Konverter penuh (full wave) Penyearah gelombang penuh satu fasa, ditunjukkan pada gambar berikut :. (a). (b) Gambar 6-3 : Penyearah gelombang penuh satu fasa dengan SCR (a) Rangkaian (b) Bentuk gelombang. Elektronika Industri Oleh Jaja Kustija, M.Sc. 42.
(43) Tegangan rata-rata dapat diperoleh dari :. 2 2. VC. Vm sin( t. )dt. 0. Vm Vm. [cos t ]0 (cos. cos ). 2Vm α = sudut penyalaan Vc RMS = =. 2 2 Vm. Vm 2 Sin2 ωt dt 0 2. sin 2 t dt 0. 1 1 Vm 2 1 cos 2 t dt 2 2 0 Vm 2 Vm = 2 E, E adalah tegangan efektif. The force factor :. VcRMS Vc. FF. The Average Load Current : Ic =. Vc RL. Ic RMS =. VcRMS RL. The average load power : PC = VC IC The total load power : PT = VC RMS IC RMS Arus RMS yang melalui penyearah : Ia =. IcRMS 2. Elektronika Industri Oleh Jaja Kustija, M.Sc. 43.
(44) 6.2.1 Penyearah gelombang tiga fasa (c) Konverter (half wave) Penyearah setengah gelombang tiga fasa, ditunjukkan pada gambar berikut :. (a). (b) Gambar 6-4 : Penyearah setengah gelombang tiga fasa dengan SCR (c) Rangkaian (d) Bentuk gelombang. Elektronika Industri Oleh Jaja Kustija, M.Sc. 44.
(45) Tegangan rata-rata dapat diperoleh dari : VC. 3 2. 5 /6. Vm sin( t. )dt. /6. 3 3Vm cos 2 α = sudut penyalaan Vc RMS =. 3 2. 5 /6. Vm 2 Sin2 ωt dt /6. 3Vm [. 1 6. 3 8. cos 2 ]. Vm = 2 E, E adalah tegangan efektif.. (d) Konverter penuh (full wave) Penyearah gelombang penuh tiga fasa, ditunjukkan pada gambar berikut :. (a). Elektronika Industri Oleh Jaja Kustija, M.Sc. 45.
(46) (b) Gambar 6-5 : Penyearah gelombang penuh satu fasa dengan SCR (c) Rangkaian (d) Bentuk gelombang. Tegangan rata-rata dapat diperoleh dari :. 3 2. VC. /2. Vm sin( t. )dt. /6. 3 3Vm. cos. α = sudut penyalaan. Vc. 2 RMS. 3 = 2. /2. Vm 2 Sin2 ωt dt /6. 3Vm [. 1 2. 3 3 cos 2 ] 4. Vm = 2 E, E adalah tegangan efektif.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 46.
(47) 6.3 Latihan soal 1. Diketahui penyearah setengah gelombang tiga fasa, dengan sudut penyalaan 45° a. Buatlah rangkaiannya ! b. Hitunglah Vrata-rata dan VRMSnya 2. Buktikan persamaan tegangan rata-rata dan tegangan RMS pada penyearah gelombang satu fasa !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 47.
(48) Modul – 7 Aktuator Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Aktuator Listrik Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan Aktuator Listrik.. 7.1 Pendahuluan Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator terdiri dari dua jenis yaitu : 1. Aktuator Listrik dan ; 2. Aktuator Pneumatik Pada modul bagian ini, hanya akan dijelaskan mengenai aktuator listrik. Gambar berikut adalah skema kontrol secara umum :. Input. Central Control Unit. Actuator. Gambar 7.1. Skema kontrol. Elektronika Industri Oleh Jaja Kustija, M.Sc. 48.
(49) 7.2 Aktuator Listrik Aktuator listrik terdiri dari : 1. Relay 2. Motor Arus Searah (DC) 3. Motor Arus Bolak-balik (AC) Berikut penjelasan dari jenis-jenis aktuator : 7.2.1 Relay Relay merupakan peralatan kontrol elektomagnetik yang dapat mengaktifkan dan mematikan kontaktor. Relay sendiri merupakan kontrak elektronik, karena terdapat koil/kumparan yang akan menggerakkan kontak membuka atau menutup bila kumparannya diberi aliran arus listrik. Berikut ini adalah keuntungan dan kerugian menggunakan relay/kontaktor. Keuntungan: Mudah diadaptasikan untuk tegangan yang berbeda. Tidak banyak dipengaruhi oleh temperatur sekitarnya. Relay terus beroperasi pada temperatur 353 K (80°C) sampai 240 K (-33°C). Tahanan yang relatif tinggi antara kontak kerja pada saat terbuka. Beberapa rangkaian terpisah dapat dihidupkan. Rangkaian yang mengontrol relay dan rangkaian yang membawa arus yang terhubung secara fisik terpisah satu sama lainnya. Kerugian: Kontak dibatasi pada keausan dari bunga api atau dari oksidasi (material kontak yang terbaik adalah platina, emas, dan perak). Menghabiskan banyak tempat dibandingkan dengan transistor. Menimbulkan bunyi selama proses kontak. Kecepatan kontak terbatas 3 ms sampai 17 ms. Kontaminasi (debu) dapat mempengaruhi umur kontak.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 49.
(50) Gambar 7.2. Simbol umum Relay. Berikut adalah salah satu jenis Relay dan simbolnya :. (a). (b). Gambar 7-3. (a) Bagian Relay (b) simbol Kontak-kontak suatu relay terdiri dari Normal Open (NO) dan Normal Closed (NC), yang mana dalam keadaan normal / tidak bekerja bilah-bilah NO dalam keadaan terbuka dan bilah-bilah NC dalam keadaan tertutup. Tetapi bila relay dalam keadaan bekerja maka bilah-bilah NO dalam keadaan tertutup dan bilah-bilah NC dalam keadaan terbuka.. 7.2.2 Motor DC Motor arus searah (DC) ialah suatu mesin yang berfungsi mengubah tenaga listrik arus searah menjadi gerak atau energi mekanik, dimana tenaga gerak tersebut berupa putaran dari rotor.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 50.
(51) Prinsip Kerja Motor DC Prinsip kerja suatu motor arus searah adalah suatu kumparan jangkar terdiri dari belitan dan terletak diantara kutub-kutub magnet. Kalau kumparan dilalui arus maka pada kedua sisi kumparan bekerja gaya Lorentz. Aturan tangan kiri dapat digunakan untuk menentukan arah gaya Lorentz, dimana gaya jatuh pada telapak tangan, jari-jari yang yang direntangkan menunjukkan arah arus, maka ibu jari yang direntangkan menunjukkan arah gaya. Kedua gaya yang timbul merupakan sebuah kopel. Kopel yang dibangkitkan pada kumparan sangat tidak teratur, karena kopel itu berayun antara nilai maksimum dan nol. Untuk mendapatkan kopel yang relatif sama dan sama besar, dibagi sejumlah besar kumparan di sekeliling jangkar. Kumparan-kumparan itu dihubungkan dengan lamel tersendiri pada komutator, sehingga motor arus searah tidak berbeda dengan generator arus searah. Perbedaan motor dan generator hanya terletak pada konversi dayanya. Generator adalah mesin listrik yang mengubah daya masuk mekanik menjadi daya listrik. Sedangkan motor mengubah daya masuk listrik menjadi mekanik.. Jenis Motor Arus Searah Berdasarkan cara memberikan fluks pada kumparan medannya, motor arus searah dapat dibedakan menjadi dua yaitu motor penguat terpisah dan motor penguat sendiri.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 51.
(52) Motor Penguat Terpisah Disebut motor penguat terpisah karena sumber tegangan yang digunakan untuk menyuplai lilitan penguat medan magnet adalah terpisah dari rangkaian kelistrikan motor. Agar lebih jelas perhatikan skema Gambar 7-4 sebagai berikut :. Im. Ia. Em. Ra. I e. V. Ea. e. Gambar 7-4. Skema Rangkaian Motor Penguat Terpisah Persamaan arusnya adalah. :. Persamaan tegangannya adalah :. Im. = Em/Rm. Ia. =I. Ea. = V + IaRa. Motor Penguat Sendiri Dikatakan motor penguat sendiri karena sumber tagangan yang digunakan untuk menyuplai lilitan penguat medan magnet adalah menjadi satu dengan rangkaian kelistrikan motor. Ditinjau dari cara menyambung lilitan penguat medan magnetnya, terdapat beberapa jenis motor yaitu : Motor Shunt Motor shunt adalah motor penguat sendiri yang lilitan penguat medan magnetnya disambung paralel dengan lilitan jangkar. Pada motor ini, jumlah lilitan penguat magnet banyak, namun luas penampang kawatnya kecil. Hal ini daharapkan agar hambatan lilitan penguatnya besar. Skema rangkaiannya adalah seperti. Elektronika Industri Oleh Jaja Kustija, M.Sc. Gambar 7-5 berikut :. 52.
(53) I. Ia Ish. Rsh. e Ra. V. Ea. e. Gambar 7-5. Skema Rangkaian Motor Shunt. Persamaan arusnya adalah. :. Persamaan tegangannya adalah. Ia. = I + Ish ,. Ish. = Vsh/Rsh. :. Ea. = V + IaRa. Vsh. = Ish Rsh. V. = Vsh. Motor Seri Motor seri adalah motor arus searah yang lilitan penguat medan magnetnya disambung seri dengan lilitan jangkar. Pada motor ini, jumlah lilitan penguat magnet sedikit, namun luas penampang kawatnya besar. Hal ini daharapkan agar hambatan lilitan penguatnya kecil. Skema rangkaiannya dapat dilihat seperti Gambar 7-6 berikut :. Is. I. Ia V. Ra. Ea. Gambar 7-6. Skema Rangkaian Motor Seri. Elektronika Industri Oleh Jaja Kustija, M.Sc. 53.
(54) Persamaan arusnya adalah. :. Persamaan Tegangannya adalah :. Em. =. Ia. = Is = I. Ea. = V + IaRa + IsRs. Sumber tegangan pada lilitan penguat magnet pada motor penguat terpisah. Ea. =. GGL lawan motor. V. =. Tegangan terminal motor. Ia. =. Arus jangkar. Is. =. Arus pada lilitan penguat magnet seri. Ish. =. Arus pada lilitan penguat magnet shunt. I. =. Arus dari sumber yang masuk ke motor. Ra. =. Hambatan pada lilitan jangkar. Rsh. =. Hambatan pada lilitan penguat magnet shunt. Rs. =. Hambatan pada lilitan penguat magnet seri. Rm. =. Hambatan pada lilitan penguat magnet motor penguat terpisah. Besarnya GGL lawan Besarnya ggl lawan pada lilitan jangkar dapat ditentukan berdasarkan rumus : Ea. =P. (n/60) (Z/A) volt. Ea. = C1n. Keterangan : Ea. = ggl lawan yang dibangkitkan oleh lilitan jangkar (volt). P. = Jumlah kutub. n. = jumlah putaran rotor (rpm). Z. = Jumlah penghantar total lilitan jangkar = Jumlah garis-garis gaya magnet tiap kutub (Weber). A. = Jumlah cabang paralel lilitan jangka. Elektronika Industri Oleh Jaja Kustija, M.Sc. 54.
(55) Torsi Motor Untuk mengetahui besarnya torsi yang dihasilkan oleh motor listrik arus s earah dapat dilakukan analisis sebagai berikut. (perhatikan Gambar 7-7). F, N R. Gambar 7-7. Gaya yang Dihasilkan pada Sebuah Kumparan. Berdasarkan Gambar 7-7 di atas persamaam untuk Torsi adalah T = F x R Nm Terdapat suatu rumus : Usaha = Gaya x Jarak Jika jarak yang ditempuh merupakan suatu bentuk lingkaran seperti Gambar 7-7 di atas, maka : Usaha = F x 2 R Joule Misal poros berputar n putaran tiap detik, maka : Usaha/detik. = F x 2 R x n Joule/detik = F x R x 2 n Joule/detik. Daya. =Tx. Joule/detik. =Tx. Watt. Untuk n = jumlah putaran tiap menit, maka. = (2 n/60). Dapat juga dituliskan bahwa : T = P/ (2 n/60) Nm Berdasarkan rumus di atas :Ta = Pa/(2 n/60) Nm atau Ta = Ea x Ia /(2 n/60) Nm Ta = P Ta = C2. Elektronika Industri Oleh Jaja Kustija, M.Sc. (n/60) (Z/A) Ia /(2 n/60) Nm Ia. 55.
(56) Cara Mengubah Arah Putaran Motor Perhatikan gambar 7-8 berikut :. Gambar7-8. Prinsip kerja Motor DC Fab. = IlxB =- a x Ilx a y B =- a z IlB. Fcd. = IlxB = a x Ilx a y B = a z IlB. Kedua gaya diatas merupakan pasangan gaya sehingga akan timbul torsi. Bagian bc dan ad gayanya saling menghilangkan. T. = rxp =rBIl. Elektronika Industri Oleh Jaja Kustija, M.Sc. 56.
(57) Torsi mengakibatkan benda dapat berputar dan jika ingin membalikkan putaran pada motor DC dengan cara mengubah polaritas, seperti gambar 7-9 berikut :. Gambar7-9. Cara Mengubah Putaran Motor dengan Saklar. Pada titik (1) motor bergerak atau berputar ke satu arah tertentu dan jika saklar pada titik (2) motor berputar berlawanan dengan arah semula. 7.2.3 Motor AC Salah satu contoh dari motor AC adalah Motor Induksi, yang terbagi menjadi dua bagian , yaitu :. 1. Motor Induksi 3 Fasa Motor induksi merupakan motor arus bolak-balik yang paling luas digunakan. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator. Belitan stator yang dihubungkan dengan suatu sumber tegangan tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron (ns = 120f/2p). Medan putar pada stator tersebut akan memotong konduktorkonduktor pada rotor, sehingga terinduksi arus, dan sesuai dengan hukum Lentz.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 57.
(58) Rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putaran relatif antara stator dan rotor disebut slip. Bertambahnya beban, akan memperbesar kopel motor, yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah, putaran rotor cenderung menurun. Dikenal dua tipe motor induksi (lihat Gambar 7 -10) yaitu motor induksi dengan rotor belitan dan motor induksi dengan rotor sangkar.. Rotor Belitan. Kumparan Stator. Rotor Sangkar. Gambar 7-10. Dua Tipe Motor Induksi Rotor Sangkar dan Rotor Belitan. Medan Putar Perputaran motor pada mesin arus bolak-balik ditimbulkan oleh adanya medan putar (fluks yang berputar) yang dihasilkan pada kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3. Hubungan dapat berupa hubungan bintang atau delta. Disini akan dijelaskan bagaimana terjadinya medan putar itu. Perhatikanlah Gambar 8.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 58.
(59) Gambar 7-11. Prinsip Terjadinya Medan Putar Pada Motor Induksi. Misalnya kumparan a-a; b-b; c-c dihubungkan 3 fasa, dengan beda fasa masing masing 1200 (Gambar7-11.a) dan dialiri arus sinusoid. Distribusi ia, ib, ic, sebagai fungsi waktu adalah seperti Gambar 7-11.b. Pada keadaan t1, t2, t3 dan t4, fluks resultan yang dihubungkan oleh kumparan tersebut masing masing adalah seperti Gambar 7-11.c, d, e, dan f. Pada t1 fluks resultan mempunyai arah samadengan arah fluks yang dihasilkan oleh kumparan a-a; sedangkan pada t2, fluks resultannya dihasilkan oleh kumparan b-b. Untuk t4 fluks resultannya berlawanan arah dengan fluks resultan yang dihasilkan pada saat t 1. (Keterangan ini akan lebih jelas pada tinjauan vektor). Dari Gambar 7-11.c, d, e dan f tersebut terlihat bahwa fluks resultan ini akan berputar satu kali. Oleh karena itu, untuk mesin berjumlah kutub lebih dari 4, kecepatan sinkron dapat diturunkan sebagai berikut: Ns = 120f/p f. = frekuensi. p = jumlah kutub. Elektronika Industri Oleh Jaja Kustija, M.Sc. 59.
(60) Tinjauan Vektor Analisis secara vektor didapatkan atas dasar: (1). Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar sesuai dengan perputaran sekrup ( Gambar 7-12.a ).. (2). Besarnya fluks yang ditimbulkan ini sebanding dengan arus yang mengalir. Notasi yang dipakai untuk menyatakan positif dan negatifnya arus yang mengalir pada kumparan a-a, b-b, c-c yaitu: untuk harga positif, dinyatakan apabila tanda silang (x) terletak pada pangkal konduktor tersebut (titik a, b, c). Sedangkan negative apabila ada tanda titik (.) terletak pada pangkal konduktor tersebut (Gambar 7-12.b). Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4 dapat dilihat pada Gambar 7-12.b. Dari semua diagram vektor diatas dapat dilihat bahwa fluks resultan. berjalan (berputar).. F. i (a). Elektronika Industri Oleh Jaja Kustija, M.Sc. 60.
(61) (b) Gambar 7-12. Vektor Arah Fluks dalam Kumparan Stator.. Prinsip Kerja Motor Induksi Adapun prinsip kerja motor induksi sebagai berikut : 1.. Apabila sumber tegangan tiga fasa dipasang pada kumparan stator akan timbul medan putar dengan kecepatan ns = 120 f/p.. 2.. Medan putar stator tersebut akan memotong batang konduktor pada rotor.. ns 3~. nr. Gambar 7-13. Motor Induksi Disuplai Arus 3 Fasa.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 61.
(62) 3.. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar: E2s = 4,44 f2N2. m. (untuk satu fasa ).. E2s adalah tegangan induksi pada saat rotor berputar. 4.. Karena kumparan rotor merupakan rangkaian yang tertutup, maka ggl (E) akan menghasilkan arus (I).. 5.. Adanya arus (I) di dalam medan magnet menimbulkan gaya magnet (F) pada rotor.. 6.. Bila kopel mula dihasilkan oleh gaya (F) pada rotor yang cukup besar untuk memikul kopel beban rotot akan berputar searah dengan medan putar stator.. 7.. Seperti telah dijelaskan pada (3) tegangan induksi timbul kaerena terpotongnya batang konduktor (rotor) oleh medan putar stator. Artinya agar tegangan terinduksi diperlukan adanya perbedaan relative antara kecepatan medan putar stator ns dengan kecepatan berputar roto nr.. 8.. Perbedaan antara ns dan nr disebut slip (S) dinyatakan derngan: S=. 9.. ns. nr ns. 100%. Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak mengalir pada kumparan jangkar rotor dengan demikian tidak dihasilkan kopel.Kopel motor akan ditimbulkan apabila nr lebih kecil dari ns.. 10.. Dilihat dari kerjanya motor induksi disebut juga sebagai motor tak serempak atau asinkron.. 2. Motor Induksi 1 Fasa Terdapat bermacam-macam motor satu fasa, yaitu yang dikategorikan motor induksi meliputi : motor fasa belah, motor kapasitor, motor kutub bayangan, motor induksi repulsi, dan sebagainya. Sedangkan motor satu fasa yang tidak dikategorikan motor induksi satu fasa adalah motor universal dan motor repulsi. Dalam praktikum kali ini akan diperkenalkan salah satu jenis motor satu fasa yaitu motor kapasitor. Tinjauan singkat masing-masing jenis motor adalah sebagai berikut :. Elektronika Industri Oleh Jaja Kustija, M.Sc. 62.
(63) Motor Fasa belah Untuk memperoleh putaran medan magnet stator, lilitan utama dan lilitan bantu dibuat sedemikian rupa sehingga arus yang mengalir pada masing-masing lilitan berbeda fasa. Medan magnet putar ini sangat diperlukan untuk memperoleh torsi awal yang besar.. Lilitan bantu. Saklar sentrifugal Rotor Lilitan Sumber 1 fasa. utama. Gambar 7-14. Skema motor induksi fasa belah. Untuk mencegah agar lilitan bantu tidak terus-menerus dialiri arus, maka pada lilitan bantu dipasang seri dengan sebuah saklar yang disebut saklar setrifugal. Apa bila putaran motor mendekati putaran nominal yaitu antara 70% 80% putaran nominal, maka saklar sentrifugal akan memutus rangkaian lilitan bantu secara otomatis. Torsi awal yang dihasilkan. sampai. dengan motor. berputar dengan kecepatan nominal adalah seperti Gambar 7-14.. 400 % torsi beban penuh 300. saklar terbuka Start. 200 Run 100 % putaran 0. 20. 40. 60. 80. 100. Gambar 7-15. Torsi Motor Fasa Belah Saat Start.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 63.
(64) Motor Kapasitor Motor kapasitor mempunyai prinsip kerja seperti motor fasa belah. Pada motor kapasitor, sebuah kapasitor dipasang seri dengan lilitan bantu dengan tujuan agar diperoleh beda fasa yang besar antara arus pada lilitan utama dan arus pada lilitan bantu.. Terdapat 3 macam motor kapasitor yaitu : motor. kapasitor start, motor kapasitor start dan run, dan motor kapasitor permanen.. Motor Kapasitor Start Skema rangkaian motor kapasitor start adalah seperti Gambar 7-16 berikut : Im. Lilitan utama. Is. Lilitan bantu Sumber AC 1 fasa C. Rotor. S. Gambar 7-16 Skema Rangkaian Motor Kapasitor Start dan Vektor Arusnya.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 64.
(65) Sedangkan karakteristik T = f(n) saat start adalah seperti Gambar 7-17 berikut :. 600 % torsi beban penuh. 500 400. Saklar terbuka. 300. 200. 100. % putaran 0. 20. 40. 60. 80. 100. Gambar 7-17. Karakteristik T = f(n) saat start. Motor Kapasitor Start dan Run Pada motor kapasitor start dan run terdapat dua buah kapasitor yang dirangkai seperti Gambar 7-18 , sedangkan karakteristik T = f(n) saat start adalah seperti Gambar 7-19 . Pada saat start, C1 dan C2 terhubung semua sehingga diperoleh beda fasa yang cukup besar antara arus pada lilitan utama dan arus pada lilitan bantu dan diperoleh torsi awal yang sangat besar. Setelah putaran motor mencapai 70% - 80% putaran nominal, kapasitor C1 terlepas namun kapasitor 2 tetap terhubung.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 65.
(66) Lilitan utama. Im Is. Rotor. Lilitan bantu V C1. C2. S. Gambar 7-18. Skema Rangkaian Motor Kapasitor Start % torsi beban. 600. penuh (T) 500 Start Saklar terbuka. 400 300 200. Run. 100 % putaran. 60. 0. 20. 80. (n). 100. 40 Gambar 7-19. Karkteristik T = f(n) Saat Start.. Motor Kapasitor Permanen Pada motor ini terdapat kapasitor yang terpasang tetap (permanen) secara seri dengan lilitan bantu. Skema rangkaian motor kapasitor permanen seperti Gambar 7-20. Karena kapasitor terpasang secara terus menerus, maka torsi yang dihasilkan baik pada saat start maupun setelah berputar nominal relatif tetap. Hal ini berarti bahwa motor ini banyak digunakan pada peralatan yang membutuhkan torsi baik awal maupun torsi saat beroperasi yang relatif tetap.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 66.
(67) Im. Lilitan utama. Is Lilitan bantu. Rotor. V C1. Gambar 7-20. Skema Rangkaian Motor Kapasitor Permanen. 7.3 Latihan Soal 1. Jelaskan cara kerja dari Relay !. 2. Berikan penjelasan dan analisa dari Motor DC Shunt !. 3. Jelaskan prinsip kerja dari Mesin AC !. 4. Buatlah sebuah contoh aplikasi dari Aktuator, dilengkapi dengan skema dan penjelasan cara kerjanya !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 67.
(68) Modul – 8 Praktikum Komponen Elektronika Hasil Pembelajaran : Mahasiswa dapat memahami dan melaksanakan praktikum komponen elektronika Tujuan Bagian ini memberikan informasi mengenai penerapan komponen elektronika dalam praktikum. 8.1 Pendahuluan Pada bagian ini akan dilakukan beberapa percobaan dari komponen elektronika yang telah dijelaskan pada modul-modul sebelumnya. Komponen yang akan dicobakan yaitu : 1. Transistor Daya 2. SCR 3. UJT 4. TRIAC dan DIAC. Elektronika Industri Oleh Jaja Kustija, M.Sc. 68.
(69) 8.2 Praktikum Komponen Elektronika 1. Praktikum komponen Transistor Daya 1. Perhatikan rangkaian percobaan penguat pasangan Darlington seperti pada Gambar 81!. 2. Tegangan Masukan. 1. 16 Vdc. 3 4 5. Tegangan Keluaran 0. Gambar 8-1. Rangkaian Percobaan Penguat Pasangan Darlington. 2. Setelah rangkaian diperiksa secara cermat dan tidak ada kesalahan pada rangkaian, hubungkanlah catu daya dengan catu daya 16 V dc dan usahakan tegangan emiter pada transistor kedua diperoleh setengah dari sumber tegangan ! 3. Aturlah tegangan dari generator fungsi hingga tegangan keluaran adalah 2 Vpp dan frekuensi = 1 KHz ! 4. Ukurlah besaran tegangan masukan dan arus masukan pada simpul pengiukuran ! 5. Selesai percobaan, kembalikan alat dan bahan ke tempatnya semula.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 69.
(70) Tabel 8-1. Pengukuran Transistor Daya Pengaturan Tegangan Generator Fungsi. V input. I input. (3-0). (3). Keterangan. 1 Vpp 2 Vpp. Lembar Latihan 1. Hitunglah penguatan tegangan dan beda fase untuk setiap perubahan tegangan generator fungsi ?. 2. Hitunglah penguatan daya rangkaian tersebut ?. Elektronika Industri Oleh Jaja Kustija, M.Sc. 70.
(71) 2. Praktikum komponen SCR 1. Rakitlah rangkaian percobaan seperti pada Gambar 8-2 ! 2. Tetapkanlah potensiometer ke posisi searah jarum jam secara penuh (maksimum)! 3. Setelah rangkaian diperiksa secara cermat dan tidak ada kesalahan pada rangkaian, hubungkanlah rangkaian dengan catu daya 24 V dc ! 4. Aturlah potensiometer secara perlahan sambil mengamati tampilan pada CRO ! 5. Selesai percobaan, kembalikan alat dan bahan pada tempatnya semula!. 1. 2. 1K 3 24 V. 4. 10 K. 5 330. 0. Gambar 8-2. Rangkaian Percobaan Thyristor Tabel 8-2. Pengukuran SCR No. Pengukuran potensiometer. 1.. ¾ bagian. 2.. ½ bagian. 3.. ¼ bagian. Ig. Vg. Lembar Latihan 1. Gambarkan kurva karakteristik antara tegangan dan arus dari hasil percobaan anda? 2. Jelaskan prinsip kerja dari percobaan tentang karakteristik Thyristor yang telah anda lakukan? 3. Gambarkanlah hasil pengamatan anda pada CRO secara cermat pada berbagai variasi nilai pada potensiometer tersebut!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 71.
(72) 3. Praktikum komponen UJT 1. Rakitlah rangkaian percobaan seperti pada Gambar 8-3 berikut ini!. 2 RB2. R1. 1 Vs. 3 4 A. E. C. B2 B1 5 RB1. Gambar 8-3. Percobaan UJT 2. Tetapkan potensiometer R ke posisi searah jarum jam secara penuh (maksimum)! 3. Setelah rangkaian diperiksa secara cermat dan tidak ada kesalahan pada rangkaian, hubungkanlah dengan sumber tegangan 24V ac! 4. Aturlah potensiometer secara perlahan, sehingga tegangan V E naik!, pada saat tertentu tegangan VE tiba-tiba turun! Hal ini menunjukkan bahwa UJT telah terpicu atau dalam kondisi On. Lakukanlah pengamatan pada simpul-simpul pengukuran! 5. Catatlah hasil pengukuran tersebut ke dalam Tabel 6! 6. Ulangi lagi langkah (4) dari percobaan ini dan lakukan pengamatan dengan menggunakan CRO!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 72.
(73) Tabel 8-3. Hasil Percobaan UJT Kondisi UJT. VE. IE. VB2. (4-0). (4). (5-0). Sebelum terpicu (Off) Sesudah terpicu (On). Lembar Latihan 1. Gambarkan kurva karakteristik antara tegangan dan arus pada percobaan UJT? 2. Berapa nilai tegangan VE dan nilai arus IE pada saat UJT dalam keadaan On? 3. Berapa nilai tegangan VE dan nilai arus IE pada saat UJT dalam keadaan Off? 4. Gambarkan hasil pengamatan pada CRO untuk tegangan V E dan VB2!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 73.
(74) 4. Praktikum komponen DIAC dan TRIAC 1. Rakitlah rangkaian percobaan seperti pada Gambar 8-4 berikut ini.. RL = 200. 1. /2 A. 3. 6V. 220 V 4. 220 V R1. 220 Ω. 0. Gambar 8-4. Rangkaian Percobaan Triac 2. Setelah rangkaian diperiksa secara cermat dan tidak ada kesalahan pada rangkaian, hubungkanlah rangkaian dengan sumber tegangan 220 V ac dengan menutup saklar ! 3. Lakukanlah pengukuran arus anoda, arus gate dan tegangan antara anoda dan katoda pada simpul pengukuran ! 4. Lakukanlah juga pengamatan dengan menggunakan CRO ! 5. Selesai percobaan pertama, lakukanlah percobaan berikutnya dengan merakit rangkaian percobaan seperti pada Gambar 8-5!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 74.
(75) 1. 220 Ω / 2A A. 2 DIAC. 220 V K. 3. G. 220 Ω. 4. 5 C1. C2. 0 Gambar 8-5. Rangkaian Percobaan Diac dan Triac 6. Tetapkanlah tombol potensiometer P ke posisi searah jarum jam secara penuh (maksimum) ! 7. Setelah rangkaian diperiksa secara cermat dan tidak ada kesalahan pada rangkaian, hubungkanlah rangkaian dengan catu daya 220 V ac! 8. Aturlah potensiometer sehingga terjadi penyulutan pada Diac. Kemudian Diac akan menyulut Triac! 9. Lakukanlah pengukuran arus anoda, arus gate dan tegangan antara anoda dan katoda pada simpul pengukuran! 10. Lakukanlah juga pengamatan dengan menggunakan CRO! 11. Selesai percobaan, kembalikan alat & bahan pada tempatnya semula!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 75.
(76) Tabel 8-4. Pengukuran Triac Kondisi Saklar. Va-k. Ia. Ig. (3-0). (3). (4). Saklar ON Saklar OFF. Tabel 5. Pengukuran Diac dan Triac Kondisi Potensiometer. Va-k. (Triac) 0). (2-. Va-k (Diac) 4). (3-. Ia. Ig. (2). (3). ¾ bagian ½ bagian ¼ bagian. Lembar Latihan: 1. Gambarkan kurva karakteristik antara tegangan dan arus dari hasil percobaan Triac dan Diac ?. 2. Gambarkan hasil pengamatan pada CRO untuk variasi nilai arus gate?. Elektronika Industri Oleh Jaja Kustija, M.Sc. 76.
(77) Modul 9 Motor Stepper Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari Motor Stepper Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan Motor Stepper.. 9.1 Pendahuluan Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Salah satu jenis dari aktuator listrik adalah Motor Stepper. Dimana motor stepper dapat meningkatkan kecenderungan terhadap kendali digital dari mesin-mesin dan berfungsi menghasilkan suatu permintaan untuk peranti-peranti mekanis, serta mampu mengirimkan gerakan-gerakan yang inkremental dengan ketelitian yang dapat diprediksi. Motor Stepper adalah salah satu alat mesin listrik yang mengubah sinyal-sinyal listrik ke dalam gerakan-gerakan mekanis diskrit. Batang atau spindel dari suatu motor stepper berputar disebabkan kenaikan-kenaikan langkah diskrit ketika sinyal listrik berada di dalam urutan yang tepat. Urutan sinyal pulsa yang diterapkan secara langsung dihubungkan dengan arah rotasi spindle motor. Kecepatan dari rotasi spindel motor dihubungkan dengan frekuensi dari sinyal masukan dan panjang rotasi secara langsung berhubungan dengan nomor sinyal masukan.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 77.
(78) 9.2 Motor Stepper Torsi motor stepper tidak sebesar motor DC, namun motor ini mempunyai tingkat presisi yang sangat tinggi dalam gerakannya. Kecepatan gerak motor ini dinyatakan dalam step per second atau jumlah step gerakan dalam setiap detiknya. Motor Stepper adalah suatu mesin listrik yang mengubah sinyal listrik kedalam gerakan mekanik diskrit. Motor Stepper motor dibagi menjadi tiga jenis. Masing-masing pada konstruksi nyata yaitu karakteristik unjuk kerja: variable-reluctance (VR), permanent magnet (PM), and PM-hybrid. Cara kerja stepper motor didasari dengan prinsip magnet dasar: seperti kutub magnet. Jika lilitan stator pada gambar 9-1 (a) diberi energi maka lilitan stator A adalah kutub selatan, stator B adalah kutub utara, dan rotor permanent magnet (PM) diposisikan seperti pada gambar, maka torsi motor akan bertambah seiring pergerakan rotor ke 1800. Maka hal tersebut akan menjadi tidak mungkin untuk menentukan arah dari putaran dan dalam rotor tidak akan bergerak seperti yang telah dikatakan tadi jika gayanya stabil. Jika yang terjadi seperti dalam gambar 9-1 (b), dua kutub stator tambahan C dan D dipasang dan diberi energi seperti terlihat dalam gambar, kita bisa memprediksi arah dari putaran rotor. Seperti dalm gambar 9-1(b) arah putaran rotor akan konstan searah jarum jam dengan rotor sejajar dengannya antara ”rata-rata” pole selatan dan ”rata-rata” pole utara. Seperti diperlihatkan dalam gambar 8-1(c).. Gambar 9-1. cara kerja motor stepper yang didasari dari prinsip magnet dasar. Elektronika Industri Oleh Jaja Kustija, M.Sc. 78.
(79) Yang. membedakan. keistimewaan. dari. PM. mesin. penggerak. adalah. dari. penggabungan sebuah magnet permanen, biasanya didalam kumparan rotor, untuk keluaran yang lebih baik, lebih dari empat kutub stator yang ditambah, lalu gigi mesin diatas setiap kutub rotor, dan juga diatas rotor. Nomor-nomor gigi diatas rotor dan stator menunjukan segi langkah yang akan didapatkan dalam setiap satuan waktu. Polaritas dari perubahan arah angin, memberikan reaksi langkah bagian batang mesin sehingga terjadi pertambahan waktu untuk perubahan muatan kutub. Cara untuk mengubah kutub menjadi seimbang, kurang lebih didapat dari perputaran batang atau tambahan untuk mengetahui segi langkahnya. Langkah PM mengoprasikan jenis-jenis mesin oleh pengaruh timbal balik diantara magnet penggerak yang terus menerus berubah, ring dan kekuatan magnet oleh stator angin membangkitkan tenaga listrik. Jika susunan dari energi angin sesuai, maka sebuah rangkaian akan stabil dari keseimbangan arah angin, sehingga akan menghasilkan tenaga listrik disekitar masin. Jika arah putaran. membangkitkan. rangkaian rotor maka akan mengikuti perubahan titik dari kesetimbangan dan perputaran dapat memberi reaksi untuk mengubah susunan, sebagai petunjuk digambar 9-2.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 79.
(80) Gambar 9-2 Rangkaian Permanent Magnet (A) diagram menurut bagan. (B) menswitch urutan. ( C ) bentuk gelombang Berdasarkan magnet tetap pada motor, terdapat suatu tenaga putaran yang digerakkan kedalam gulungan motor walaupun gulungan pada stator tidak akan menghasilakan rugi-rugi. Energi putaran dapat diperoleh dengan cara memutar suatu PM stepper dengan tangan. Tenaga putaran dapat dihasilkan pada motor jika motor dipindahkan dari posisi yang mempunyai nilai hambatan minimum ( dimasukan kedalam. Elektronika Industri Oleh Jaja Kustija, M.Sc. suatu. 80.
(81) persamaan rangkaian DC) yang menyebabkan magnet tetap mengalami perubahan secara terus-menerus. Tenaga putaran ini lebih banyak dibandingkan tenaga putaran tenaga normal dan hanya sebagian kecil persen saja dari tenaga putaran yang maksimum.. Gambar 9-3. Prinsip dasar dari PM motor. Variabel reluktansi motor adalah sebuah stator, yang merupakan bagian dari wound poles (katup). Rotor berbentuk silinder. Untuk bagian dari gigi memiliki hubungan dengan katup stator dan dengan gigi itu sendiri (stator tidak boleh memiliki gigi). Nomor dari gigi akan menentukan perbedaan sudut yang dibutuhkan (ditunjukkan oleh gambar 9-4). Tipe sebuah motor VR ditunjukan pada gambar 9-5 dimana aliran arus sudah layak mengaliri lilitan kumparan motor. Tenaga putar (sumber Listrik) akan menghasilkan langkah yang berupa pemutar rotor pada posisi tidak terhubung garis edar minimum magnet.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 81.
(82) Gambar 9-4. Penampang atas dari Variabel Reluktansi motor. Pada posisi ini listrik statis akan menjadi stabil pada tenaga putar tanpa tekanan yang diperlukan untuk memindahkan rotor dari posisi stabil.partikular ini tidak akan berada pada satu posisi absolut. Pada rata-rata motor banyak posisi stabil memberi energi untuk stator.yang mana sebuah perbedaan energi akan mengatur lilitan untuk tidak terhubung pada sumber statorakan mengubah medan magnet karena rotor pada posisi yang baru.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 82.
(83) Gambar 9-5 . Langkah VR motor (potongan melintang stator memperlihatkan lilitan berfasa tunggal yang lengkap) A) tiga fasa melilit B) tiga fasa pemasangan kawat koreksi C) tiga fasa tabel eksitasi rangkap D) pijakan bentuk gelombang. Pemilihan urutan energizing yang tepat dari melilit membuat posisi-posisi yang stabil dan berputar dengan lembut di stator poles, menentukan kecepatan putaran dan pengaturan pada rotor. Ketika pola yang diberi tenaga, posisi rotor perlahan mengubah pola energisasi kumparan. Gambar 9-5 (c), ilustrasi modus-modus pembangkitan yang menghasikan suatu patokan sudut langkah yang nominal. Pembangkitan yang rangkap (selalu dua kumparan didalamnya) sering digunakan adalah karena memiliki tenaga putaran lebh tinggi. Tidak seperti stepper PM, stepper VR memilki sisa kemagnetan. Maka rotor (detent torque) akan menjadi tidak kuat ketika stator tidak diberi tenaga. Sudut langkah ditentukan oleh nomor dari stator dan gigi rotor (bervariasi dari 7.5 sampai 30).. Elektronika Industri Oleh Jaja Kustija, M.Sc. 83.
(84) Motor stepper Hybrid lebih mahal dibandingkan PM – motor stepper, namun dengan penampilan yang lebih baik termasuk pengaruh resolusi langkah, torsi dan kecepatan. Ciri khas dari sudut langkahnya berkisar dari 36° hingga 0.9° (dengan 100 – 400 langkah per putaran). Motor stepper Hybrid merupakan perpaduan bagian terbaik dari kedua motor stepper, PM dan VR. Rotornya bergigi banyak seperti VR dan pada bagian axis berisi magnet konsentrik disekitar batangnya. Gigi di rotor memberikan lintasan yang lebih baik untuk membiarkan fluks magnet memilih tempat yang disukai di dalam airgap. Hal ini berlanjut pada ketahanan dan karakteristik torsi dinamis ketika kita membandingkannya dengan kedua jenis motor yang lain.. Gambar 9-6. Penampang melintang Stepper Hybrid. Tipe motor stepper yang paling sering digunakan adalah PM dan Hybrid. Jika pembuat tidak yakin dengan tipe yang akan dipilih sebaiknya disesuaikan dengan aplikasinya. Motor-motor Stepper masuk ke berbagai macam ukuran , tipe-tipe dan gaya-gaya. Prinsip yang dasar untuk semua adalah sama, dan mereka jatuh masuk ke salah satu dari tiga jenis yang dibahas. Mereka mungkin sedikitnya mempunyai 2 lilitan, atau banyaknya sepuluh lilitan fasa (ini menempuh 2500 langkah untuk satu revolusi).. Elektronika Industri Oleh Jaja Kustija, M.Sc. 84.
(85) 9.3 Latihan Soal 1. Jelaskan jenis-jenis dari motor Stepper !. 2. Jelaskan prinsip kerja dari motor Stepper !. 3. Buatlah sebuah contoh penerapan motor Stepper pada aplikasi di. industri, jelaskan. dengan cara kerjanya !. Elektronika Industri Oleh Jaja Kustija, M.Sc. 85.
(86) Modul – 10 Sensor / Transducer Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari sensor atau transducer Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan sensor atau transducer.. 10.1 Pendahuluan Sensor adalah suatu alat yang dapat mengubah satu besaran fisis menjadi besaran fisis yang lain. Gambar berikut adalah contoh skema kontrol secara umum :. Besaran fisis. sensor. -. μ prosesor PC μ controler PLC. Prosesor. Actuator. - Listrik - Pneumatic - dll. Gambar 10-1. Contoh skema kontrol. Elektronika Industri Oleh Jaja Kustija, M.Sc. 86.
(87) 10.2 Sensor / Transducer Sensor terdiri dari dua jenis, yaitu : a. Contact type b. Non contact type ( Proximity sensor ) Contoh :. Gambar 10-2. Simbol (a) NO. (b) NC. (c) Change Over. Sedangkan simbol umum dari sensor adalah sebagai berikut :. Gambar 10-3. Simbol umum Sensors. Sensor digunakan untuk keperluan : 1. Pengukuran besaran fisis secara elektronik ( pengukuran temperatur ; tekanan ; kelembaban ; level ; kecepatan dll ) 2. Sensor dapat juga diintegrasikan dengan otomasi modern untuk kepentingan ini biasanya sensor digunkan untuk melihat atau membaca status atau keadaan mesin atau proses dan output sensor ini akan menjadi masukan untuk prosesor.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 87.
(88) Untuk kepentingan pengendalian sensor yang sering digunakan antara lain : Mechanical limit switches Magnetic sensors Biasanya digunakan untuk minimal dan maximal silinder. Simbolnya :. Inductive sensors Digunakan untuk semua logam. Simbolnya : Capasitive sensors Digunakan untuk semua jenis logam Simbolnya : Optical sensors Digunakan untuk sensor warna gelap atau terang Simbolnya : Pneumatic sensors. Keluaran dari sensors terbagi dalam tiga tipe yaitu, sebagai berikut : . Binary Output Sensors ini mengkonversi besaran fisis menjadi signal biner yakni dua keadaan High atau Low atau analog dengan saklar dalam keadaan on atau off.. . Analogue Output Sensors jenis ini mengkonversi besaran fisis menjadi besaran sinyal kontinu, signal keluaran dapat berupa parameter listrik (Resistansi, Kapasitansi, Induktansi) atau dalam bentuk arus listrik atau tegangan listrik.. . Serial Output Sensors jenis ini mengubah besaran fisis menjadi keluaran (output) seri atau komunikasi standard ( contoh RS 232C, RS 422A, RS 485, profibus, fiebus, ASI ).. Elektronika Industri Oleh Jaja Kustija, M.Sc. 88.
(89) Biasanya sensors dengan output binary dapat langsung disambungkan ke PLC ( need voltage compatibility ). Dalam banyak kasus sensors dengan output analogue dapat langsung disambungkan dengan PLC ( need voltage or current compatibility ). Terkadang keluaran sensor memerlukan pengkondisi sinyal untuk dapat diproses oleh PLC.. Untuk mengubah besaran fisis sebuah sensor dapat mendeteksi melalui : a. Kontak langsung ( contoh limit switch) b. Non contact / contactless sensing ( proximity sensor) Berikut contoh bentuk sensor : -. Reed proximity sensors. Gambar 10-4. contoh bentuk sensor.. Tabel 10-1 . Simbol Terminal Fungsi Positive supply voltage (+) Negative supply voltage (-) Switch Output Antivalent switch Output. Elektronika Industri Oleh Jaja Kustija, M.Sc. Warna brown blue black white. Simbol BN BL BK WH. 89.
(90) Proximity sensor dapat dibuat dengan Normally Closed (NC) atau Normally Open (NO), seperti gambar berikut :. Gambar 10-5. Diagram hubungan untuk dua penghantar. Elektronika Industri Oleh Jaja Kustija, M.Sc. 90.
(91) Gambar 10-6. Diagram hubungan untuk tiga penghantar, L = Beban. Gambar 10-7. Diagram hubungan untuk empat tiga penghantar (DC), L = Beban. Elektronika Industri Oleh Jaja Kustija, M.Sc. 91.
(92) Keluaran saklar positif dan negatif Keluaran saklar dapat ditentukan dengan dua cara, yaitu : 1. PNP Output. Gambar 10-8. PNP Output. 2. NPN Output. Gambar 10-9. NPN Output. Contoh Penggunaan Sensor : 1) Buat rangkaian pendeteksi benda jika ada benda maka lampu akan menyala. a. menggunakan sensor jenis PNP b. menggunakan sensor jenis NPN 2) Buat rangkaian untuk mendeteksi logam jika ada logam maka lampu merah menyala lampu hijau mati jika tidak ada logam sebaliknya. a. menggunakan sensor jenis PNP b. menggunakan sensor jenis NPN. Elektronika Industri Oleh Jaja Kustija, M.Sc. 92.
(93) Penyelesaian : 1. Untuk mendeteksi benda (baik logam atau non logam) dapat digunakan sensor jenis kapasitip dengan rangkaian sebagai berikut : a) Jenis PNP. b) Jenis NPN. Cara kerja : jika sensor mendeteksi benda maka saklar akan berpindah dari open menjadi close sehingga lampu menyala.. Elektronika Industri Oleh Jaja Kustija, M.Sc. 93.
(94) 2. Untuk mendeteksi benda logam maka digunakan jenis sensor induktif a) Jenis PNP Cara kerja : jika sensor mendeteksi benda maka saklar NO menjadi ON dan lampu. merah. menyala,. sedangkan. saklar NC menjadi OFF sehingga lampu hijau mati.. b) Jenis NPN. Elektronika Industri Oleh Jaja Kustija, M.Sc. 94.
(95) 10.3 Latihan Soal 1. Jelaskan fungsi dari sensor !. 2. Berikan penjelasan dan analisa dari diagram hubungan untuk empat penghantar !. 3. Berikan contoh penggunaan sensor dalam kehidupan sehari-hari beserta cara kerjanya!. Elektronika Industri Oleh Jaja Kustija, M.Sc. 95.
(96) Modul – 11 Pneumatik (1) Hasil Pembelajaran : Mahasiswa dapat memahami dan menjelaskan karakteristik dari komponen Pneumatik Tujuan Bagian ini memberikan informasi mengenai karakteristik dan penerapan komponen Pneumatik. 11.1 Pendahuluan Sistem pneumatik terdiri dari beberapa tingkatan yang mencerminkan perangkat keras dan aliran sinyal. Berbagai tingkatan yang membentuk lintasan kontrol untuk aliran sinyal mulai dari sinyal masukan menuju sinyal keluaran, seperti ditunjukkan pada gambar berikut : ALAT AKTUASI Keluaran Elemen kontrol akhir. ELEMEN PEMPROSES Sinyal prosesor. ELEMEN MASUKAN Sinyal masukan. PASOKAN ENERGI Sumber. Gambar 11-1. Aliran sinyal kontrol. Elektronika Industri Oleh Jaja Kustija, M.Sc. 96.
(97) 11.2 Pneumatik (1) Tingkatan utama dari sistem pneumatik adalah : c. Catu daya (energi supply) Pasokan energi biasanya didapat dari Kompresor, Tangki, Pengatur tekanan dan peralatan Pelayanan Udara. Simbol :. d. Elemen masukan (sensor) Elemen yang termasuk kedalam sensor yaitu Katup Kontrol Arah, Katup Batas, Tombol, dan Sensor Proksimitas. Simbol :. e. Elemen pengolah (prosesor) Elemen yang termasuk kedalam prosesor yaitu Katup Kontrol Arah, Elemen Logika, Katup dan Kontrol Tekanan Simbol :. f.. Elemen kerja (aktuator) Elemen yang termasuk kedalam aktuator yaitu Silinder Pneumatik, Aktuator Rotari, Indikator. Elemen kontrolnya adalah Katup Kontrol Arah. Simbol : Aktuator. Elemen Kontrol. Elektronika Industri Oleh Jaja Kustija, M.Sc. 97.
(98) Elemen-elemen. dalam. sistem. pneumatik. diwakili. oleh. simbol-simbol. yang. menunjukkan fungsi dari elemen tersebut. Pada tingkatan aktuator ditambahkan kontrol elemen. untuk melengkapi struktur. Kontrol elemen mengontrol aksi dari aktuator. setelah menerima sinyal yang dikirim oleh elemen pengolah. Katup kontrol arah dapat sebagai sensor, pengolah atau pengontrol aktuator. Perbedaaan fungsi biasanya berdasarkan cara pengoprasiannya dan bergantung pada letak katup kontrol arah di dalam gambar rangkaian berikut :. Gambar 11-2. Diagram rangkaian dari elemen-elemen pneumatik. Udara yang dihirup manusia setiap saat ini sebenarnya masih dalam keadaan tercemar oleh kotoran-kotoran dan partikel-partikel air. Prakteknya, masih banyak ditemukan bahwa lingkungan udara yang kotor berdekatan dengan jaringan kompresor. Hal ini akan sangat mengganggu bahkan akan dapat merusak jaringan itu sendiri. Udara bertekanan (angin) yang diperlukan sebagai tenaga penggerak peralatan pneumatik senantiasa harus bersih sehingga ikut menjaga dari kerusakan komponen-kom-ponen. Pengotoran atau pencemaran udara dalam bentuk butiran-butiran kecil dari kotoran atau karat besi, karena minyak pelumas yang berlebihan, dan kelembaban udara sering menimbulkan gangguan-gangguan pada peralatan pneumatik dan. merusak. bagian-bagiannya. Untuk hal tersebut aspek dibawah ini harus diperhatikan guna untuk mendapatkan udara yang berkualitas :. Elektronika Industri Oleh Jaja Kustija, M.Sc. 98.
Gambar
+7
Dokumen terkait
Rangkaian pengkondisi sinyal di perangkat pengirim berfungsi untuk mengkondisikan tegangan keluaran dari sensor suhu agar sesuai dengan jangkauan tegangan masukan yang dibutuhkan
Nilai bobot pada koneksi penghubung dan bias pada setiap neuron di lapisan masukan menuju lapisan tersembunyi didasarkan pada nilai faktor δ j dan sinyal keluaran yang dihasilkan
Nilai bobot pada koneksi penghubung dan bias pada setiap neuron di lapisan masukan menuju lapisan tersembunyi didasarkan pada nilai faktor δ j dan sinyal keluaran yang dihasilkan
Function Point mengukur proyek perangkat lunak dengan mengkuantifikasi kegunaan pemrosesan informasi yang berhubungan dengan tipe berkas, keluaran, masukan data atau
Selain catu daya dc untuk Op-Amp LM 741 yang harus keluaran ganda, besarnya sinyal masukan dari gelombang kotak/pulsa yang dihasilkan, yang amplitudonya 12 Volt, akan
Ø Sinyal kontrol M/IO, ALE dan DT/R memilih memori atau masukan/keluaran, maka address tersebut akan di latch pada bagian bus address dan mengset secara langsung pentransferan dat
Gambar 6.11.. Dengan cara yang sama, rakitlah rangkaian seperti pada gambar 6.11 di atas. Pasangkan osiloskop pada terminal masukan dan keluaran. Hidupkan generator sinyal, atur
Sedangkan Sistem Kontrol Lingkar Tertutup ( Closed Loop ) adalah sistem pengontrolan dimana besaran keluaran memberikan efek terhadap besaran masukan, sehingga
