REMOTE SENSING PARAMETER POWER SUPPLY MELALUI
JARINGAN INTERNET
Felisia Karina(1), Budhy Sutanto(2), Tjwanda Putera Gunawan(3)
e-mail: [email protected](1), [email protected](2), [email protected](3).
ABSTRAK
Remote sensing parameter power supply melalui jaringan internet menggunakan ATMega168 sebagai prosesor. Dilakukan pengukuran tiga parameter yaitu tegangan, arus, dan suhu ruangan. Sensor suhu menggunakan DS1621 produksi Dallas semi-konduktor dengan memanfaatkan sistem komunikasi I2C. sensor arus menggunakan ACS712 dengan komunikasi SPI, diproduksi oleh Allegro Microsystem yang merupakan hall-effect sensor yang mendeteksi arus melalui medan magnet yang mengalir. Sensor tegangan memanfaatkan ADC dari ATMega 168 dengan menggunakan pembagi tegangan. Parameter yang diukur, dikirim ke Internet lewat jaringan Ethernet melalui Arduino Ethershield. Stream data bisa dipantau lewat web page maupun pengumpulan data (Data Logging) yang dapat ditampilkan secara grafik.
Kata kunci: ethershield, Arduino, ACS712
ABSTRACT
Power supply parameter remote sensing through the Internet network using ATMega168 processor. Performed measurements of three parameters: voltage, current, and temperature of the room. Temperature sensing using DS1621 Dallas production of semiconductors by utilizing the I2C communication system. Current sensor using ACS712 with SPI communication, manufactured by Allegro Microsystem which is a hall-effect sensor that detects the current flowing through a magnetic field. Voltage sensor harness from the ATMega168 ADC by using voltage divider. Parameter to be measured, was sent to the Internet via an Ethernet network through the Arduino Ethershield. Data stream can be monitored via a web page or collection of data (Data Logging) that can be displayed graphically.
Keyword: Job vacancy website, PHP, jQuery
PENDAHULUAN
Perkembangan teknologi menuntut untuk adanya pemanfaatan sebuah peralatan yang multifungsi demi menghemat tempat, waktu, serta yang terutama adalah biaya. Banyak dijumpai sekarang ini adalah peralatan seperti thermometer dan avometer baik secara analog maupun digital yang sudah beredar di masyarakat luas. Tetapi dalam pembacaannya memerlukan pembacaan secara aktual, dan menjadi suatu permasalahan apabila peralatan tersebut berada diluar kota.
Maka dari itu, diperlukannya alat pengukur sensor dimana alat ini dibangun dengan memanfaatkan pemantauan jarak jauh yang menggunakan Jaringan Internet. Penggunaan teknologi Internet
digunakan karena dapat diakses dari manapun sesuai dengan kebutuhan. Alat ini dikembangkan dengan menggunakan Arduino Ethershield.
ENC28J60
Arduino Ethershield memakai ENC28J60 sebagai controller Ethernet, yang terhubung dengan PC melalui SPI (Serial Peripheral Interface). ENC28J60 merupakan produksi dari Microchip USA, memiliki berbagai kemampuan Ethernet, Buffer, dan MAC (Medium Access Controller). ENC28J60 bekerja pada tegangan 3.1 V hingga 3.6 V dengan tegangan tipikal 3.3 V, toleransi input hingga 5V. Temperatur kerja dari ENC28J60 berada pada kisaran -40º C hingga +85º C, memiliki 6 input interup dan 1 interup output. Berikut akan dibahas secara detail mengenai blok diagram, deskripsi kaki pin, beserta dengan komunikasi baik secara hardware maupun software pada Arduino Ethershield.
Pengenalan Perangkat
ENC28J60 dirancang untuk menghubungkan jaringan Ethernet dengan SPI. Didalam ENC28J60 terdapat modul DMA untuk pengiriman data yang cepat serta untuk melakukan penghitungan, yang bisa digunakan untuk berbagai protokol jaringan. Komunikasi dengan PC diimplementasikan melalui pin interup dan SPI, dengan clock hingga 20 MHz. Dua pin khusus digunakan sebagai Link LED dan indikasi jaringan. Blok diagram dari ENC28J60 dapat dilihat dari gambar 1. Hanya dengan beberapa komponen pasif, cukup untuk menghubungkan mikrokontroller ke jaringan Ethernet.
Arduino Ethershield juga me-miliki beberapa komponen pendukung yang terdapat didalamnya, seperti oscillator, voltage regulator, pengubah tegangan pada pin I/O untuk mendukung toleransi 5V dan logika sistem kontrol.
Gambar 1. Blok Diagram ENC28J60
Direct MAC
ENC28J60 menggabungkan dua tujuan ganda kontroler DMA yang dapat digunakan untuk
menyalin data diantara dua lokasi melalui 8Kbyte buffer memory. Juga dapat digunakan untuk mengkalkulasi checksum 16 bit yang sesuai dengan berbagai protokol standart industri, termasuk TCP dan IP.
Ketika operasi dari DMA di-mulai, pasangan register EDMAST disalin ke pointer sumber internal. DMA akan menjalankan satu byte setiap kali dan kemudian menambahkan pointer sumber internal. Bagaimanapun, ketika satu byte sedang diproses dan pointer sumber internal sama dengan pointer akhir buffer penerima, ERXND, maka pointer sumber tidak akan bertambah. Justru, pointer sumber internal akan diisi dengan pointer awal buffer penerima, ERXST. Dengan cara ini, maka DMA akan mengikuti lingkaran struktur FIFO dari buffer penerima dan menerima paket dapat diproses dengan menggunakan satu operasi saja. Operasi dari DMA akan berhenti ketika pointer sumber internal cocok dengan pointer EDMAND.
Sementara operasi DMA apa saja sedang berjalan, pointer DMA dan bit ECON1.CSUMEN tidak boleh diubah. Operasi DMA dapat dibatalkan kapanpun dengan cara mengosongkan bit ECON1.DMAST. Tidak ada register apapun yang akan berubah; bagaimanapun, beberapa byte memory mungkin sudah disalin apabila pemindahan DMA sudah berjalan.
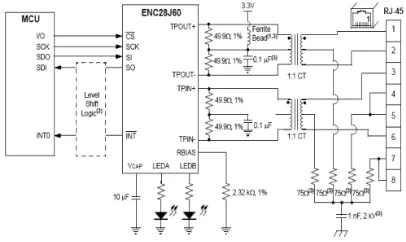
Komponen Eksternal
Untuk melengkapi interface Ethernet, ENC28J60 memerlukan beberapa komponen standar yang ditambahkan secara internal. Penambahan komponen dapat dilihat seperti pada gambar 2. Sirkuit analog internal pada modul PHY memerlukan resistor eksternal 2.32 kΩ, 1% resistor akan ditambahkan dari RBIAS ke ground. Resistor mempengaruhi TPOUT+/- dari amplitude sinyal.
Resistor harus diletakkan se-dekat mungkin pada chip dengan tidak ada sinyal yang berdekatan untuk mencegah terjadinya noise kapasitif ke pin dan mempengaruhi pengiriman data. Beberapa logika pada komponen beroperasi pada 2.5 V. Regulator tegangan pada chip dimanfaatkan untuk menghasilkan tegangan tersebut. Satu-satunya komponen eksternal yang dibutuhkan adalah filter kapasitor eksternal, yang dihubungkan dari VCAP menuju ground.
I/O Level
Chip ENC28J60 merupakan komponen dengan tegangan kerja 3.3 V, namun peralatan ini dibuat dengan tujuan agar lebih mudah digabungkan dengan sistem 5Volt. Pin SPI CS, SCK dan input SI, sama seperti pin RESET, memiliki toleransi 5V. Dilain sisi, apabila perangkat utama beroperasi pada tegangan 5V maka ada kemungkinan tidak sesuai dengan spesifikasi ketika SPI dan input interupsi diberikan tegangan 3.3V oleh output dari CMOS pada ENC28J60 tersebut. Maka diperlukan adanya pengubah tegangan. Untuk mengatasi pengubah tegangan tersebut cukup digunakan 74HCT08 (gerbang AND).
Penggunaan dari buffer 3-state memungkinkan integrasi yang mudah pada sistem dimana SPI dapat digunakan juga oleh perangkat lainnya. Mengubah tegangan menjadi tegangan kerja 3.3 V pada level TTL pada Arduino Ethershield ini menggunakan 78HCT08, yaitu gerbang AND. Pada level TTL memiliki arti bahwa chip ENC28J60 ini memiliki toleransi hingga 5 V, yang menjamin bahwa apabila di-berikan tegangan 5 V tidak akan mengalami kerusakan sekalipun ENC28J60 memiliki tegangan kerja 3.3V.
Gambar 3. Pengubah Tegangan Dengan Menggunakan Gerbang AND
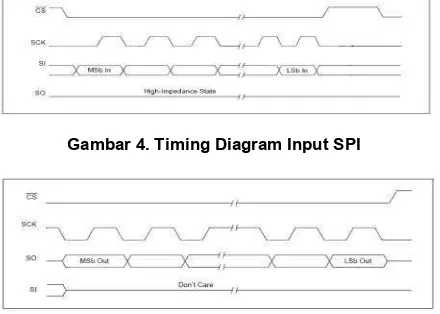
SPI ( Serial Peripheral Interface )
ENC28J60 dirancang dengan interface langsung pada port SPI (Serial Peripheral Interface) yang disediakan oleh Arduino Serverino, dimana terjadi komunikasi antara mikro dan Ethershield. Implementasi yang digunakan pada ENC28J60 ini
hanya mendukung mode 0 saja. Selain itu, port SPI memerlukan SCK pada posisi Idle level Low. Perintah dan data dikirimkan melalui pin SI, dengan data yang dikirimkan sesuai clock pada rising edge dari SCK. Data diberikan oleh ENC28J60 pada line SO, pada falling edge dari SCK. Pin CS harus ditahan pada posisi low ketika terdapat proses apapun dan kembali pada posisi high ketika selesai proses.
Komunikasi pada SPI bus Ethershield dan Arduino menggunakan pin CS yang terhubung dengan pin I/O pada ATMega168, SCK yang terhubung dengan SCK pada ATMega168, SI dengan SO dari ATMega168, SO dengan SI, CLKOUT terhubung dengan OSC1, dan INT dengan INT0.
Gambar 4. Timing Diagram Input SPI
Gambar 5. Timing Diagram Output SPI
Komunikasi Secara Software
Komunikasi Ethershield dan Arduino secara software diatur melalui library yang digunakan pada program. Pada Arduino Ethershield digunakan library ethershield.h yang merupakan library standart dari ethershield, tetapi pada penelitian ini menggunakan library dengan nama ETHER_28J60.h sebagai library tambahan.
ETHER_28J60 merupakan library yang memanfaatkan library standart dari ethershield, yang dibuat dengan lebih sederhana agar pada penggunaannya lebih mudah dan dapat dimengerti. Seperti pada program lainnya, pada library ini juga dilakukan inisialisasi dan pendefinisian dari prosedur dalam library.
disimpan dalam bentuk ETHER_28J60.h, dimana program utama akan dituliskan dalam format .cpp. Berikut diperlukan untuk memanggil library lain yang akan digunakan oleh library ini agar dapat melakukan pekerjaan untuk mengirim data dan sebaliknya. Dan pada cara ini juga memanggil library yang sudah dibuat sebelumnya, yaitu ETHER_28J60.h.
Pada pendefinisian atau pen-deklarasian ini juga disertai dengan penentuan dari variebel masing-masing prosedur yang sudah didefinisikan sebelumnya pada library yang dipanggil. Penentuan dari nilai dari masing-masing parameter tersebut dapat diketahui dengan melihat isi dari library yang digunakan. Setelah melakukan pendeklarasian dari masing – masing library yang digu-nakan, maka selanjutnya harus dilaku-kan pengaturan pada register yang dilakukan dengan terlebih dahulu mendeklarasikan variabel port.
Pengaturan mengenai register tersebut sudah langsung dilakukan oleh library langsung dan sudah tidak perlu diatur lagi secara manual, cukup dengan memanggil class yang sudah ditentukan. Pada bagian pengaturan atau setup tersebut juga terdapat cara untuk mengubah clockout dari 6.25 MHz menjadi 12.5 MHz. Pengubahan clock tersebut berguna untuk mempercepat proses pengiriman data. Pada bagian setup tersebut juga
memanggil prosedur lain, yaitu
es.ES_init_ip_arp_udp_tcp.
Terdapat bagian dimana variabel yang digunakan dideklarasikan dengan nama yang baru agar dapat lebih mudah dalam pemanggilan variabelnya. Selain itu, pada bagian tersebut juga memanggil nilai dari parameter yang sudah didefinisikan sebelumnya pada bagian setup. Nilai dari masing-masing memory diatur melalui prosedur service request, dengan tujuan untuk menunggu apabila terdapat request baik itu ping maupun data. Broadcast arp, pengecekan paket IP yang diterima, dan pengecekan apakah terdapat data untuk dikirim juga dilakukan pada bagian ini. Yang paling penting adalah untuk mengirimkan umpan balik apabila terdapat data pada memory yang akan ditulis ulang. Berikut merupakan cara pemanggilan dari prosedur service request dalam program.
Prosedur yang paling sering dipanggil adalah prosedur print. Prosedur ini terdiri atas dua parameter yang menentukan jenis data yang dikirim, kedua parameter tersebut adalah text dan number. Pada prosedur text, digunakan jenis data
char atau dapat disebut juga character. Didalamnya hanya dilakukan pengecekan dengan memanggil procedure lain yaitu checksum, yang kemudian membaca data, dan disimpan dalam variabel tertentu.
Prosedur print lainnya adalah dalam bentuk angka, yang diambil dalam bentuk string, dengan menentukan panjang dari data yang akan diambil, yang disimpan dalam bentuk array dalam sebuah variabel. Pada saat prosedur print dipanggil, data masih diambil dan disimpan pada memory sementara dan baru dikirimkan setelah prosedur respond dipanggil.
Pada penulisannya didalam program, prosedur respon ini diletakkan pada akhir program utama dengan tujuan untuk melaksanakan program perintah yang sudah dituliskan pada program utama tersebut. Apabila prosedur respon ini tidak ada, maka program yang sudah dituliskan diatasnya yang membu-tuhkan respon balik dari mikro tidak akan menjawab.
ACS712
Pengukuran arus biasanya membutuhkan sebuah resistor yang dihubungkan secara seri pada beban dan mengubah arus menjadi tegangan. Untuk pengukuran arus AC, tegangan tersebut biasanya diumpankan ke transformator arus sebelum masuk ke pengkondisi sinyal. ACS712 merupakan sensor arus yang diproduksi oleh Allegro, yang memiliki kelebihan untuk mengukur arus baik itu arus DC maupun arus AC. Teknologi Hall Effect yang diterapkan oleh Allegro ini menggantikan fungsi dari resistor seri dan transformator arus menjadi sebuah sensor yang jauh lebih kecil. ACS 712 banyak digunakan dalam kehidupan sehari – hari karena dalam penggunaannya yang cukup mudah.
didalamnya yang telah dibuat dengan ketelitian yang tinggi oleh Allegro.
Hal Penting Pada ACS712
Berikut merupakan tabel karakteristik dari ACS712 yang dapat dilihat pada tabel 1. Tabel ini menjelaskan mengenai karakteristik ACS712 secara elektrik, yang berlaku untuk seluruh tipe dari ACS712. Perbedaan dari masing-masing tipe ACS712 hanya terdapat pada kemampuan mengukur arus dan sensitivitasnya. Pada Penelitian ini digunakan ACS712 dengan tipe ACS712ELCTR-05B-T, dengan tujuan agar ketelitian yang diberikan memadai. Dan pada gambar 6 merupakan gambar dari ACS712.
Tabel 1. Karakteristik ACS712
Gambar 6. ACS712
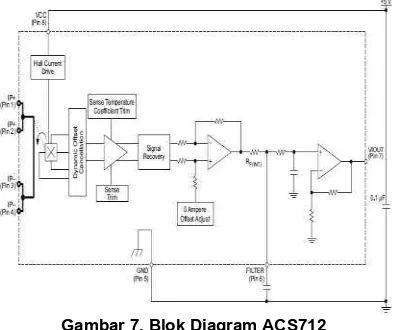
Hambatan dalam penghantar sensor sebesar 1,2 mΩ dengan daya yang rendah. Jalur terminal konduktif secara kelistrikan diisolasi dari sensor mengarah (pin 5 sampai pin 8). Hal ini menjadikan sensor arus ACS712 dapat digunakan pada aplikasi-aplikasi yang membutuhkan isolasi listrik tanpa perlu menggunakan opto-isolator atau teknik isolasi lainnya yang mahal. Ketebalan penghantar arus didalam sensor sebesar 3x kondisi kelebihan beban. Sensor ini telah dikalibrasi oleh Allegro.
Gambar 7. Blok Diagram ACS712
Komunikasi Secara Hardware
Pada komunikasi secara hardware ini dilakukan dengan menghubungkan pin output yaitu pin 7 dari ACS712 pada pin ADC 0 dari ATMega168. Output dari ACS712 dalam bentuk tegangan, dimana penyesuaian dari perhitungan kalibrasi yang diberikan oleh Allegro dapat dilakukan secara software. Secara hardware, ACS712 dipasang pada board yang memang sesuai dengan Arduino. Pin lain yang perlu dihubungkan pada Arduino adalah pin Vcc dan ground yang dapat dihubungkan pada 5 V dan ground dari Arduino. Vcc dari Arduino Serverino dapat langsung dihubungkan karena tegangan kerja dari ACS712 adalah 5 Volt.
Komunikasi Secara Hardware
Komunikasi secara software pada ACS712 dilakukan dari penentuan nilai kalibrasi yang dapat diketahui pada saat ujicoba. Penentuan nilai kalibrasi dari pabrik biasanya pada titik terbesar, sehingga dapat ditentukan sesuai kebutuhan. Pada penelitian ini ditentukan bahwa kalibrasi dari ACS712 ini adalah 835.
DESAIN PERANGKAT LUNAK
Gambar 8 menunjukkan blok diagram perangkat keras yang akan dibuat.
Komunikasi Secara Hardware
Masing - masing dari sensor terhubung dengan ADC dari ATMega168, dimana ATMega8 berfungsi sebagai sebagai prosessor yang digunakan untuk mengolah data, serta membaca data ADC dari masing - masing sensor.
Rangkaian ATmega168
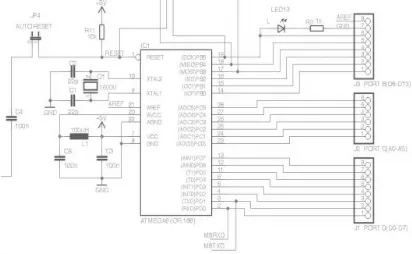
Rangkaian ATMega168 yang dibutuhkan merupakan rangkaian minimum system biasa, yang memanfaatkan pin ADC dari ATMega168. Maka dari itu digunakan rangkaian dasar dari Arduino Serverino sebagai rangkaian dasar, dimana memiliki fungsi dan kegunaan yang sama. Blok diagram dari rangkaian dapat dilihat seperti Gambar 9.
Pada rangkaian ini, merupakan rangkaian utama yang menjalankan semua aspek dari rangkaian remote sensing parameter power supply. Rangkaian ini memiliki banyak kaki input maupun output yang dapat digunakan. Pada alat ini, beberapa kaki input dari ATmega168 digunakan untuk disambungkan dengan beberapa rangkaian sensor. Kaki input yang digunakan adalah kaki pada port C, dimana merupakan kaki ADC dari ATMega168.
Gambar 9. Blok Diagram Rangkaian
Dari Gambar 9, pada pin 2 dan 3 yaitu RXD dan TXD disambung dengan LED, digunakan sebagai penanda apabila terjadi pengiriman data pada ATMega168. Pada pin 1 merupakan tombol reset yang disambungkan dengan resistor dan capasitor 100nF, berfungsi untuk melakukan manual reset apabila perangkat mengalami gangguan. Untuk saat ini, pada port input lainnya tidak digunakan, tetapi apabila diperlukan dapat diakses secara
software melalui ATMega168. Pin PC4 dan PC 5 pada nomer kaki 27 dan 28 merupakan pin dengan device ID Analog 4 dan Analog 5, pada kedua pin ini digunakan sebagai komunikasi I2C pada DS1621.
Rangkaian Arduino Ethershield
Berikut ini merupakan schematic dari Ethershield yang digunakan, dengan menggunakan chip ENC28J60 didalamnya.
Gambar 10. Rangkaian Arduino Ethershield
Arduino Ethershield merupakan rangkaian Ethernet Interface yang diproduksi oleh Arduino dengan chip ENC28J60. Ethershield ini merupakan serangkaian dari Arduino, memiliki kelebihan yaitu dapat langsung dihubungkan dengan rangkaian minimum sistem dari mikroprosessor dengan cara disusun. Rangkaian Ethershield ini menggunakan SPI untuk langsung terhubung dengan microkontroler, oleh karena itu Ethersield tersebut tidak menghabiskan kaki dari Arduino Serverino itu sendiri. Pada gambar 10 merupakan schematic dari Arduino Ethershield yang digunakan.
Rangkaian Sensor Arus
Salah satu sensor yang digunakan pada rangkaian remote sensing parameter adalah sensor arus. Sensor yang digunakan adalah ACS 712. Rangkaian sensor arus dapat dilihat pada gambar 11. Pada rangkaian ini, sensor arus yang digunakan dihubungkan pada port 0 analog dari ATMega8. Selain itu digunakan power supply sebagai sumber tegangan beban, serta beban berupa 10 buah resistor 10 Watt, dengan resistansi 100 Ω yang disusun secara paralel.
dengan range 5A dengan tujuan untuk mendapatkan tingkat keakuratan yang cukup. ACS712 dengan range maksimum 5A digunakan karena rangkaian yang diukur saat ini tidak membutuhkan tingkat range yang terlalu besar tetapi membutuhkan keakurasian cukup.
Gambar 11. Rangkaian ACS712
Dalam pembuatan alat ini, rangkaian dari sensor arus digabungkan dalam 1 PCB yang diletakkan pada bagian atas dari Ethershield. Berikut adalah hasil jadinya pada gambar 11.
Rangkaian Sensor Tegangan
Gambar 12 menunjukkan rangkaian sensor tegangan yang digunakan pada Remote Sensing Parameter Power Supply. Rangkaian sensor tegangan yang digunakan merupakan rangkaian pembagi tegangan biasa yang terdiri dari resistor, trimpod, dan LM324. Berikut adalah schematic dari sensor tegangan tersebut.
Gambar 12. Rangkaian Sensor Tegangan
Dari gambar dapat dilihat bahwa terdapat beberapa resistor dan resistor variabel sebagai pembagi tegangan, serta ditambahkan LM324 sebagai op-amp yang dirangkai secara non-inverting. Rangkaian non inverting tersebut digunakan untuk menjaga agar data yang terbaca pada sensor tidak terkena noise yang diakibatkan dari adanya arus yang ikut mengalir pada kabel apabila kabel yang digunakan kurang bagus, atau apabila jarak yang jauh.
Resistor yang digunakan adalah resistor dengan nilai 330 K, dan nilai dari resistor variabel adalah
10K. Pemilihan dari nilai tersebut mempertimbangkan perhitungan nilai dari tegangan yang diukur, serta mengambil nilai resistor yang lebih besar agar arus yang dihasilkan dalam pengukuran tidak besar. Pengukuran tegangan adalah dengan range 0 – 250 Volt, dengan tegangan output 5 Volt menuju ADC dari mikroprocessor. Pada sensor tegangan ini, terdapat sebuah selektor yang digunakan untuk memilih range tegangan yang akan diukur.
Rangkaian Sensor Suhu
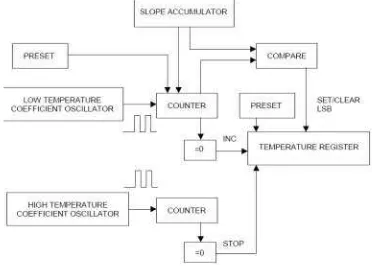
Pada rangkaian ini menggunakan sensor suhu DS1621 yang bertugas untuk menangkap perubahan suhu ruangan. Pada DS1621 memiliki 2 pin yang digunakan untuk membaca data, tetapi disini, digunakan sebagai komunikasi I2C antara DS1621 dan ATMega168. Kedua pin tersebut terhubung dengan pin 27 dan 28 dari ATMega168 yang ekuivalen dengan Analog 4 dan 5. Pada Gambar 13 merupakan schematic dari DS1621.
Gambar 13. Hasil Pemasangan Encoder pada Tuas Motor
DS1621 dapat mengubah data analog yang diterima menjadi data digital dengan durasi waktu 1 detik, tanpa membutuhkan adanya tambahan komponen pada penggunaannya. Berikut ini merupakan digram rangkaian pengukur dari DS1621 pada gambar 14 yang menjelaskan cara pengambilan data temperatur dari DS1621.
Sejak data dikirimkan melalui komunikasi I2C tersebut dengan MSB terlebih dahulu, maka data suhu dapat diisi pada DS1621 ataupun dari DS1621 masing-masing sebagai byte tunggal (dengan resolusi suhu 1ºC) atau dalam dua byte, dimana byte kedua dapat berisi nilai LSB (0.5ºC) dari bacaan suhu seperti yang ditunjukkan pada tabel 4.1. Dan untuk diingat, bahwa 7 bit dari byte ini di set dengan nilai ‘0’.
DESAIN PERANGKAT LUNAK
Program Pada Arduino
Perangkat keras maupun perangkat lunak telah berkembang begitu banyak seiring semakin banyaknya teknologi baru yang muncul setiap hari, namun sebagian besar hubungan timbal balik dan saling ketergantungan diantara keduanya semakin berkurang. Di satu sisi, kita sering melihat sebuah sistem dengan arsitektur perangkat keras baik yang baru tapi desain softwarenya terlalu mahal untuk arsitektur tersebut.
Di sisi lain, hampir semua alat mekanis di seluruh dunia modern mengarah ke penggunaan sistem komputer terintegrasi. Dalam situasi dimana biaya merupakan pertimbangan, sistem komputer terintegrasi dengan perangkat lunak yang efisien dapat mengurangi biaya desain secara signifikan. Maka digunkanlah program Arduino yang langsung memiliki compilernya sendiri.
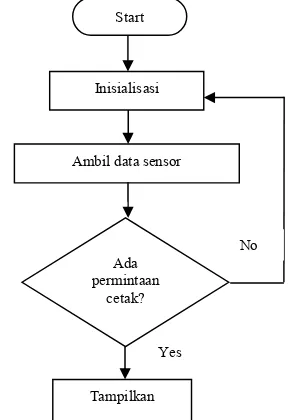
Gambar 15. Flowchart Program Pengolah Sensor
Program Pengolah Sensor
Pada program pengolah sensor ini meliputi program pengaturan library yang diperlukan serta
pengaturan nilai parameter program. Pada Gambar 15 ditunjukkan flowchart untuk program pengolah sensor ini dan akan dibahas mengenai program masing-masing pengolah sensor dan pengaturan nilai awalnya.
Pengaturan Awal
Pada pengaturan awal meliputi pemanggilan library yang akan digunakan, pendefinisian komponen yang digunakan, serta setup class yang digunakan.
Sensor Suhu
Sensor suhu yang digunakan adalah sensor DS1621 dan menggunakan library wire.h yang merupakan library langsung dari Arduino. Pada inisialisasi DS1621 membutuhkan library Wire.h karena pada library tersebut mendefinisikan komunikasi I2C dari DS1621. Pada library wire.h merupakan pendeklarasian dari class yang digunakan, serta tipe dari variabel yang terkait dengan library tersebut.
Sensor Arus
Pada sensor arus digunakan sensor ACS 712, dimana output dari sensor disambungkan pada pin Analog 0 dari Arduino. Perhitungan pada sensor Arus meliputi inisialisasi variabel local yang digunakan hanya pada class arus saja,pendeskripsian tipe data, serta menyimpan data perhitungan akhir pada variabel tertentu. Sensor Tegangan
Pada sensor tegangan, digunakan pembagi tegangan biasa yang memanfaatkan LM324 sebagai opamp untuk menjaga agar data tetap utuh selama pengirimannya.
Program Utama
Pada bagian ini merupakan program utama, yang digunakan untuk memanggil hasil dari class sebelumnya yang telah digunakan untuk memproses data. Program penghitungan yang dilakukan hanya dilakukan satu kali, dan kemudian data tersebut akan disimpan pada data storage agar waktu yang digunakan untuk perhitungan tidak menjadi panjang.
Program Pengolah Menggunakan Delphi
Di program utama ini dilakukan pengaturan awal untuk nilai-nilai parameter pada program, inisialisasi komponen-komponen yang digunakan pada program, serta penanganan terhadap penekanan tombol. Pada gambar 16 ditunjukkan flowchart untuk program utama dari alat ini.
Gambar 16. Flowchart Program Pengolah Delphi
Pengambilan Data dari Web
Data sensor yang sudah dikirimkan pada web browser, diambil dengan cara mengambil source dan di search data tersebut. Didalam proses pengambilan data juga termasuk penentuan dari alamat Arduino yang sudah harus diketahui. Pengolahan Data Menjadi Grafik.
Program berikut digunakan untuk mengolah data yang ditampilkan dari web yang kemudian akan diinputkan ke Delphi dan ditampilkan dalam bentuk grafik. Pada pembuatan grafik tersebut, menggunakan cara sql text, yaitu mengambil file data dengan format file Data.mdb dimana data tersebut telah tersimpan dalam bentuk data logger. Penggunaan grafik yang berbeda dengan tujuan untuk memudahkan pengaturan satuan yang digunakan terutama pada arus, agar tampilan dari range data dapat lebih jelas.
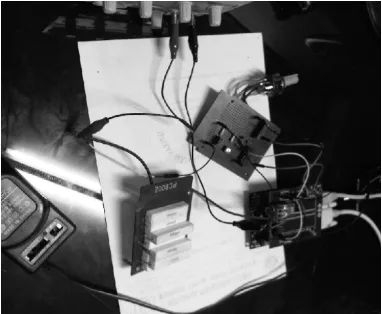
Gambar 17.Rangkaian Uji Coba Alat
UJI COBA ALAT
Pengujian ini dilakukan dengan menggunakan power supply DC sebagai sumber tegangan dan beban untuk arus yang akan diukur. Hasil pengujian ini akan dibandingkan dengan Avometer sebagai patokan pembanding.
Untuk tampilannya dapat dilihat melalui web browser, dan pengumpulan data dilakukan melalui Delphi. Pada web browser data dari sensor hanya ditampilkan saja, tetapi apabila ingin melakukan pengumpulan data, harus menggunakan Delphi yang juga ditampilkan secara grafik.
Gambar 18. Tampilan Pada Web Browser
Hasil Uji Coba
Dalam hasil uji coba ini dilakukan perbandingan antara data yang terukur menggunakan sensor dan hasil yang diukur dengan menggunakan avometer. Berikut ini merupakan hasil pengukuran tersebut, dapat dilihat pada Tabel 2.
Tabel 2 Hasil Perbandingan Pengukuran
Avometer Sensor Terbaca Arus Teg Arus Suhu Teg 0.32 3.5 0.31 28 3.39 0.53 5.8 0.52 28 5.67 0.84 9.2 0.83 27 9.16 1.10 12 1.09 27 11.7 1.32 14.5 1.31 28 14.2 1.56 17 1.55 29 16.9
Tabel berikut menunjukkan perbedaan yang terjadi pada pengukuran tegangan antara power suppy, avometer, serta pada data terbaca dari sensor. Penggunaan dari avometer tersebut karena penunjuk angka pada power supply merupakan tegangan yang diinginkan, tetapi pada kenyataannya tegangan tersebut mengalami drop akibat pembebanan yang terjadi. Perbandingan yang digunakan menggunakan avometer agar didapatkan nilai perbandingan yang benar.
Start
Inisialisasi
Penekanan Tombol?
Tambahkan data pada datalogger
Gambar 19. Tampilan Pada Delphi
KESIMPULAN
Dari hasil uji coba, dapat disimpulkan bahwa :
Pengiriman data menuju jaringan Ethernet tidak dapat dilakukan dengan jarak waktu yang berdekatan. Karena mikro perlu persiapan pengiriman ke Ethernet, oleh karena itu Arduino melakukan pengambilan data baru dapat melakukan persiapan untuk pengiriman data ke Ethernet.
Penulisan pada web browser tidak dapat menggunakan perintah penulisan yang terlalu banyak. Hal tersebut karena keterbatasan RAM dari prosessor yang digunakan saat ini, yaitu ATMega168.
Pada proses pengambilan data dan menampilkan pada Delphi tidak dapat terlalu cepat, karena dapat mengakibatkan Arduino Serverino mengalami gangguan. Batas waktu antara pengambilan data sekarang dan pengambilan data berikutnya adalah minimal 2 detik.
DAFTAR PUSTAKA
1. http://www.tuxgraphics.org/common/src2/articl e06061/eth-remote-device.pdf.
2. http://www.tuxgraphics.org/electronics/200606/ article06061.shtml
3. Microsystems, Allegro, ACS712, 2010, Worchester: Massachusett.
4. Technology, Microchip, ENC28J60, 2008, USA.