Optimasi Preliminer pada Desain Propeller Wageningen B-Screw Series dengan Menggunakan Metode Multi Objective Optimization
Niki Veranda Agil Permadi
1, Raden Dimas Endro Witjonarko
2, Nurvita Arumsari
3Program Studi D4 Teknik Permesinan Kapal, Jurusan Teknik Permesinan Kapal, Politeknik Perkapalan Negeri Surabaya, Indonesia1
Program Studi D4 Teknik Perpipaan, Jurusan Teknik Permesinan Kapal, Politeknik Perkapalan Negeri Surabaya, Indonesia2 Program Studi D4 Teknik Permesinan Kapal, Jurusan Teknik Permesinan Kapal, Politeknik Perkapalan Negeri Surabaya,
Indonesia3
Email : [email protected]1; [email protected]2; [email protected]3
Abstrack - Propulsion system is one of ship systems which require more attention, especially on propeller design. Propeller design will have a serious impact on ship performance because the propeller greatly affects the ship speed. As a matter of KCR 60M (high speed missile vessel), where the service speed that is requires by the owner is 28 knots while at sea trial the service speed was not reached which was only 27 knots. The slight speed difference has a big impact on the company where the ship were built. The company will get a penalty due to time delay of delivery because they have to solve the problem within a certain time period. The amount of the penalty fee reached up to 2.5% of ship price per day. On the other hand the designers do not have much time to do research on propeller designs which are able to provide optimal performance due to another work deadlines that must be completed. Therefore there are many shipbuilding companies turn over the propeller design to outsourcings with the aim of removing the failure risk to them.
From this problem, this study will discuss about preliminary optimization method of KCR 60M propeller design, especially by using the Wageningen B-screw series propeller with the multiobjective optimization method. The propeller that will be optimized is expected to be able to have maximum value of thrust coefficient (KT) and efficiency (η). The optimization is done to each propeller number start with Z=3 up to Z=6. The population of design space was obtained after running the optimization program. The final optimal design parameter was taken using crowding distance technique and the result for each propeller number are respectively Z=3 (B3-787, B3-314, B3-560), Z=4 (B4-478,B3-308, B3-428), Z=5 (B5-416, B5- 501, B5-476), and Z=6 (B6-570, B6-727, B6-709. Computational Fluid Dynamics analysis (CFD) was done to obtained the thrust value of each propeller model. The final optimum design is obtained from Z=5 population run-3 with smallest MSE value.
Keywords: CFD, multi objective optimizatio, preliminary optimization, propeller efficiency, propeller thrust, wageningen B-screw series.
Nomenclature
Z Jumlah daun propeller D Diameter propeller
AE/AO Rasio luasan daun propeller P/D Pitch rata-rata
Vs Vessel speed RT Total resistance w Wake fraction t Thrust deduction Va Speed of advance J Advance coefficent KT Thrust coefficient KQ Torque coefficient Tprop Propeller thrust N Putaran propeller 1. PENDAHULUAN
Di Indonesia terdapat banyak industri perkapalan yang berkembang pesat. Hal ini dibuktikan dengan adanya pesanan kapal oleh
negara lain, misalnya kapal perang dengan tipe Strategic Sealift Vessel (SSV). Terdapat juga permintaan dari Kementerian Pertahanan Indonesia, yaitu KCR 60M (Kapal Cepat Rudal).
Terdapat beberapa masalah pada proses pembangunan kapal ini. Salah satu masalah yang terjadi adalah terkait dengan kecepatan kapal.
Seperti KCR 60M, di mana kecepatan yang diinginkan oleh owner adalah 28 knot sedangkan pada saat sea trial kecepatan kapal tidak terpenuhi dan hanya mencapai 27 knot. Perbedaan kecepatan yang kecil ini berdampak besar pada perusahaan tempat kapal itu dibangun.
Perusahaan akan mendapatkan penalti karena keterlambatan waktu pengiriman sebab mereka harus menyelesaikan masalah tersebut dalam periode waktu tertentu dan jumlah biaya penalti mencapai hingga 2,5% per hari dari harga kapal.
Salah satu cara alternatif untuk mengatasi masalah ini adalah mengganti main enigne dengan daya yang lebih besar. Tentu saja ini akan memakan
biaya banyak, selain itu ada kemungkinan dengan alternatif ini, karakteristik kapal dapat berubah seperti kemampuan manuver dan stabilitasnya.
Untuk meminimalkan biaya, perusahaan mencari perangkat yang mampu meningkatkan thrust propeller sehingga dapat meningkatkan juga kecepatan kapal KCR 60M. Perangkat ini adalah Propeller Boss Cap Fin (PBCF).
Meskipun biaya pemasangan alat ini lebih murah daripada biaya penggantian main engine, namun perusahaan masih harus membayar biaya tambahan di luar biaya yang direncanakan untuk membangun kapal pada awalnya. Dari masalah ini, salah satu perhatian khusus adalah propeller.
Ada banyak jenis parameter yang mempengaruhi kinerja propeller, seperti jumlah daun, diameter, rasio luasan daun (Ae / Ao), rasio pitch (P / D), putaran propeller, dan lainnya. Parameter ini sangat mempengaruhi nilai koefisien thrust (KT), koefisien torsi (KQ), dan efisiensi propeller (η).
Nilai-nilai ini akan mempengaruhi kinerja baling- baling dalam mengubah daya main engine menjadi gaya dorong untuk menggerakkan kapal pada kecepatan tertentu.
Masalah yang sering dihadapi oleh perancang sistem propulsi adalah menentukan konfigurasi propeller yang sesuai untuk kebutuhan kapal. Berdasarkan uraian masalah tersebut, studi ini dilakukan untuk membuat metode optimasi preliminer dalam mendesain propeller KCR 60M, terutama dengan menggunakan propeller Wagenignen B-Screw Series dengan metode optimasi multiobjektif Metode ini digunakan untuk menyelesaikan masalah multiobjektif dengan merumuskan fungsi kendala sebagai batas untuk variabel yang akan dioptimalkan. Metode optimasi multiobjektif mampu memberikan beberapa alternatif solusi untuk suatu masalah dengan lebih dari satu fungsi objektif. Seperti masalah desain propeller dimana propeller harus mampu memberikan kinerja terbaik. Karakteristik propeller dinyatakan dalam koefisien thrust (KT) dan efisiensi baling-baling (η). Nilai-nilai ini akan menjadi fungsi objektif dalam optimasi desain propeller. Dengan merumuskan fungsi kendala, parameter optimal dari geometri propeller akan diperoleh sehingga propeller akan mampu memberikan nilai koefisien thrust (KT) dan efisiensi baling-baling (η) yang optimal secara bersamaan.
2. METOLOGI 2.1 Diargram Alir
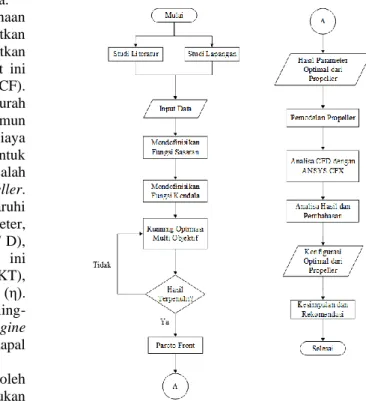
Penelitian ini dimulai dari studi literatur dan studi lapangan, pembuatan program optimasi, pemodelan propeller, analisa CFD, analisis data dan terakhir tahap kesimpulan. Data yang dikumpulkan berupa data primer dan data sekunder. Data yang dibutuhkan meliputi data tahanan kapal dan propeller dari KCR 60M.
Metode penelitian ini ditunjukkan dalam diagram alir pada gambar 1 di bwah ini
Gambar 1 Diagram alir penelitian
2.2 Referensi
Penelitian ini dikembangkan dari penelitian sebelumnya, termasuk penelitian yang dilakukan oleh Ehsan & Hassan (2016) yang membahas metodologi desain untuk mengoptimalkan hubungan antara lambung kapal dan baling-baling secara simultan dengan menggunakan metode algoritma evolusioner. Dalam penelitian ini, fungsi Life Time Consumption (LFC) dan fungsi biaya termasuk efisiensi dorong, torsi, dan baling- baling ditentukan sebagai fungsi objektif yang dioptimalkan, hasil penelitian menunjukkan bahwa metode yang digunakan sesuai dan efektif untuk optimalisasi desain baling-baling. Benini Ernesto (2003) [1] mengembangkan optimasi multiobjektif untuk propeller B-screw series dengan fungsi tujuan mengoptimalkan nilai koefisien thrust (KT) dan efisiensi propeller (η) menggunakan metode algoritma evolusioner. Xie Guanmo (2011) [2] juga mengembangkan metode optimasi awal dalam desain propeller dengan pendekatan optimasi multiobjektif dalam bentuk (NSGA-II) dengan tujuan mengoptimalkan nilai koefisien thrust (KT) dan efisiensi propeller (η), hasil penelitiannya berupa 1 set Pareto Solution yang menyatakan populasi solusi optimal yang dapat digunakan sebagai parameter desain propeller. M.M Gaafary & H.S El-Kilani (2009) mengembangkan pemrograman untuk mengoptimalkan desain tipe propeller B-series.
Gagah Prayogo & Deddy Chrismianto (2017) [3]
menganalisis nilai thrust optimal pada baling-
baling B4-70, Ka4-70, dan Au4-59 pada kapal tunda dengan variasi sudut rake menggunakan Computational Fluid Dynamics (CFD).
1) Propeller
Untuk menghasilkan gaya dorong diperlukan torsi dan torsi yang digunakan untuk menghasilkan gaya dorong dianalisis dalam open water test. Pengujian ini disebut open water karena propeller bekerja dalam aliran yang seragam [4]. Karakteristik beban baling- baling dapat ditampilkan secara grafis dengan beberapa koefisien dalam bentuk pengukuran.
Diagram open water menyatakan torsi dan thrust sebagai fungsi kecepatan propeller.
Karakteristik propeller terdiri dari koefisien thrust (KT), koefisien torsi (KQ), dan advance coefficent (J).
Advance coefficent J = 𝑉𝐴
𝑛 𝐷 (1)
Thrust coefficient 𝐾𝑇= 𝑇
𝜌 𝑛2𝐷4
(2)
Torque coefficient 𝐾𝑄 = 𝑄
𝜌 𝑛2𝐷5
(3)
Efisiensi open water (ηO) dinyatakan sebagai rasio daya yang digunakan dan total daya yang dihabiskan atau dengan kata lain adalah rasio antara daya dorong dan daya yang diberikan.
Sehinga dapat ditulis ke dalam bentuk berikut.
ηO = 𝐽
2𝜋 𝐾𝑇
𝐾𝑄 (4)
2) Propeller Wageningen B-Screw Series Hasil kinerja terperinci dari B-Series dilaporkan oleh Oosterveld dan van Oossanen [7] dalam karakteristik open water dalam bentuk koefisien thrust (KT) dan koefisien torsi (KQ) dalam kondisi bilangan Reynolds 2x106 yang kemudian dituliskan ke dalam persamaan berikut.
𝐾𝑇= ∑39 𝐶𝑠,𝑡,𝑢,𝑣
𝑛=1 (𝐽)𝑠(𝑃
𝐷)𝑡(𝐴𝐸
𝐴𝑂)𝑢(𝑍)𝑣 (5) 𝐾𝑄 = ∑47 𝐶𝑠,𝑡,𝑢,𝑣
𝑛=1 (𝐽)𝑠(𝑃
𝐷)𝑡(𝐴𝐸
𝐴𝑂)𝑢(𝑍)𝑣 (6) 3) Optimasi Multiobjektif pada Propeller
Wagenginen B-Screw Series
Tujuan utama dalam optimasi propeller adalah untuk memaksimalkan koefisien thrust (KT) dan efisiensi (η) secara simultan. Terdapat fungsi kendala dimana propeller yang akan dioptimasi harus mampu memenuhi
kebutuhan gaya dorong kapal. Secara matematis masalah dalam optimasi propeller B-series dapat ditulis sebagai berikut.
Maximize:
𝑓1 (𝑥) = 𝑓 (𝐾𝑇)
𝑓1 (𝑥𝑖 , … , 𝑥𝑛 ) = 𝑓 (∑39𝑛=1𝐶𝑠,𝑡,𝑢,𝑣(𝐽)𝑠(𝑃
𝐷)𝑡(𝐴𝐸
𝐴𝑂
)𝑢(𝑍)𝑣) (7) 𝑓2 (𝑥) = 𝑓 (𝜂)
𝑓2 (𝑥𝑖 , … , 𝑥𝑛 ) = 𝑓 (2𝜋 𝐽 𝐾𝐾𝑇
𝑄) (8) Subjected tothrust constraint:
𝑓1= ( 𝑅𝑇
𝜌 𝐷2(1−𝑡) (1−𝑤)2𝑉𝑠2 𝐽2)
𝑓1− ( 𝑅𝑇
𝜌 𝐷2(1−𝑡) (1−𝑤)2𝑉𝑠2 𝐽2) = 0 (9) Dimana 𝜌 adalah massa jenis air laut. Pada opimasi ini nilai advance coefficent J divariasikan dengan nilai 0-1.8, nilai P/D divariasikan dengan nilai 0.5-1.4, dan nilai AE/AO divariasikan dengan nilai 0.3-1.05.
Jumlah blade (Z) adalah variabel diskret dengan nilai 3, 4, 5, dan 6. Sehingga optimasi ini akan dilakukan pada masing-masing jumlah daun propeller. Proses pembuatan program optimasi dilakukan dengan menggunakan software Matlab R2019a 4) Crowding Distance
Crowding distance adalah salah satu teknik pemilihan individu pada satu populasi dengan cara mengurutkan fitness value dari propulasi tersebut sesuai dengan urutan non-dominated.
Pada satu front pareto nilai fitness dari ndividu yang telah diurutkan akan dihitung kerapatannya (crowding distance) antara satu individu dengan individu lain. Semakin besar nilai kerapatan suatu individu dengan individu disekitarnya maka individu tersebut memiliki nilai fitness terbaik sebab tidak ada individu yang berada didekatnya atau dengan kata lain tidak ada individu yang serupa dengannya.
Crowding distance ditunjukkan pada gambar 2 berikut. Dimana nilai yang dihasilkan i adalah perkiraan keliling cuboid yang dibentuk oleh solusi terdekat i. Nilai total crowding distance dihitung dari jumlah distance untuk setiap fungsi objektif. Algortima rincinya telah disusun oleh Deb (2001).
Gambar 2 Crowding Distance
5) Analisis CFD
Tujuan dari analisis ini adalah untuk mengetahui nilai thrust yang dihasilkan oleh propeller dari hasil optimasi. Aplikasi CFD telah berkembang cukup pesat dalam beberapa tahun terakhir untuk menyelesaikan masalah aliran pada propeller. Bahkan hari ini teknik CFD menjadi bagian dari proses desain dalam diagram spiral desain. Penelitian ini menggunakan software ANSYS CFX 18.2 sebagai analisa CFD. Computational Fluid Dynamics (CFD) terdiri dari tiga elemen utama:
a) Pra Prosesor b) Solver Manager c) Post Processor
3. HASIL DAN PEMBAHASAN 3.1 Pembuatan Program Optimasi
Script program optimasi dibuat pada software Matlab R2019a dengan menggunakan library genetic algorithm “gamultiobj”. Dimana operator ini mampu menyelesaikan optimasi multiobjektif dengan constraint function beserta boundary constraint. Objective Funtion yang telah di tentukan adalah f1 dan f2 sesuai dengan persamaan (7) dan (8). Constraint function ditulis sesuai dengan persamaan (9) dan pengondisian variabel ditulis sesuai dengan batasan-batasan variabel yang telah ditetapkan untuk nilai J (0- 1.8), AE/AO (0.5-1.5), dan P/D (0.3-1.05).
Optimasi akan dijalankan sebanyak 3 kali untuk tiap-tiap nilai Z. Dari populasi yang didapatkan akan dipilih populasi dengan nilai MSE terkecil (dibawah 5%). Hasil nilai MSE terkecil dimiliki oleh populasi Z=5 pada run ke-3 dengan nilai MSE sebesar 3.82032 x 10-7
Hasil dari optimasi ini berupa populasi Z=5 yang memiliki nilai optimum. Penyebaran populasi pada Z=5 ditunjukkan pada gambar 1 berikut. Gambar 1 merupakan design space dari Z=5. Gambar tersebut berisi populasi yang memiliki nilai f1 dan f 2 maksimum. Sehingga nilai parameter yang dimiliki oleh individu pada populasi tersebut adalah nilai parameter desain yang optimal yang meliputi nilai J, AE/AO, dan P/D.
Gambar 3 Design Space Z=5
3.3 Pemilihan Individu Terbaik
Individu pada populasi design space yang ada perlu diurutkan berdasarkan urutan rank pareto yaitu dengan menggunakan fast non-dominated sorting. Metode ini dapat dilakukan pada software R dengan menggunakan package “nsga2R” dan
“mco”. Fast non-dominated sorting adalah sebuah pendekatan untuk mengurutkan solusi non-dominated pada populasi yang ada pada design space ke dalam bentuk level atau rank non- dominated. Setelah didapatkan ranking pada tiap- tiap pareto front maka dapat dihitung nilai crowding distance individu yang ada pada ranking tersebut. Nilai ini kemudian akan digunakan sebagai parameter pemilihan individu pada suatu populasi. Individu yang memiliki ranking terbaik dan memiliki nilai crowding distance terbesar maka akan berpotensi untuk terpilih. Script untuk menghitung crowding distance ditulis pada software R dengan memasukkan data input f1 dan f2 beserta variabel penyusunnya. Hasil individu yang terpilih ditunjukkan pada tabel berikut.
Tabel 1 Model Terpilih untuk Z=5
Model D J P/D AE/AO
B5-416 1.9 1.022918 1.399749 0.415667 B5-501 1.9 1.022984 1.399128 0.500689 B5-476 1.9 1.022465 1.399359 0.476343
3.4 Simulasi CFD
Simulasi ini dilakukan untuk mengetahui nilai thrust dari tiap-tiap propeller yang telah dimodelkan. Software yang digunakan adalag ANSYS CFX 18. Langkah-langkah simulasi diuraikan sebagai berikut.
a) Geometry
Tahap ini adalah tahap imoprt model propeller dengan format IGES atau parasolid ke dalam ANSYS workbench CFX sekaligus pembuatan domain fluida. Domain fluida yang dibentuk terdiri dari 2 bagian yaitu domain stationary dan domain rotating.
Gambar 4 Import Geometry dan Pembuatan Domain Fluida
b) Mesh
Setelah domain fluida terbentuk maka langkah selanjutnya adalah meshing. Pada penelitian ini proses size function yang digunakan adalah proximitive and curvature dengan maximum face size sebesar seteangah dari nilai default yang diberikan oleh ANSYS tujuannya adalah agar ukuran element semakin kecil sehingga jumlah nodes dan element akan semakin banyak. Dengan jumlah element yang banyak maka akan didapatkan hasil yang akurat namun perlu diketahui bahwa semakin banyak jumlah element yang tebentuk maka proses mesh dan komputasi akan berlangsung lama dan memakan banyak waktu. Hasil mesh ditunjukkan pada gambar berikut.
Gambar 5 Hasil Mesh
c) Setup
Pembentukan boudnary pada tiap-tiap domain fluida dilaukan pada tahap setup ini. Domain stationary ditambahkan boundary berupa inlet boudnary dengan nilai input Va, outlet boundary dengan nilai input static pressure, dan wall boundary berupa no slip wall. Domain rotatating ditambahkan wall boundary berupa no slip wall.
Kedua domain fluida ini kemudian dihubungkan dengan interface fluid fluid dengan frame change berupa frozen rotor. Parameter setup untuk tiap- tiap domain fluida disajikan pada tabel-tabel berikut.
Tabel 8 Setup Domain Stationary
Tabel 9 Setup Domain Rotating
Tabel 10 Domain Interface
d) Solution
Setelah semua setup selesai diatur maka langkah selanjutnya adalah menjalankan simulasi.
Analisa pada penilitan ini menggunakan steady state dengan residual berupa RMS. Nilai RMS ini ditargetkan mencapaoi nilai 0.0001 sehingga iterasi akan berhenti ketika residual mencapai nilai tersebut. Maximum iteration yang digunakan adalah 1000 namun apabila proses running sudah konvergen maka akan berhenti dengan sendirinya.
Hasil dari simulasi ini ditunjukkan pada gambar berikut
Gambar 6 RMS Mass and Momentum mebentukan boudnary pada tiap-tiap domain fluida dilaukan pada tahap setup ini. Domain stationary ditambahkan boundary berupa inlet boudnary dengan nilai input Va, outlet boundary dengan nilai input
Gambar 7 Grafik Thrust Propeller Dari hasil yang diperoleh dapat diamati bahwa nilai thrust konvergen pada iterasi ke 319 dengan kurva yang lurus konsisten dan tidak berosilasi.
Sehingga iterasi akan berhenti pada nilai tersebut.
e) Result
Pada tahap ini dapat ditampilkan bentuk streamline aliran fluida pada propeller dan juga pressure contour pada daun propeller. Nilai thrust dan juga tekanan pada daun propeller dapat dikeluarkan pada tahap ini dengan menggunakan function calculator. Contoh hasil streamline dan pressure contour ditunjukkan pada gambar berikut.
Gambar 8 Streamline pada Model B5-501
Gambar 9 Pressure Contour Model B5-501 pada Sisi Back
Gambar 10 Pressure Contour Model B5-501 pada Sisi Face
3.4 Rekapitulasi Hasil Simulasi
Dari hasil simulasi yang dilakukan untuk semua model propeller didapatkan hasil berupa nilai thrust dan juga tekanan pada daun propeller.
Nilai thrust dan tekanan pada masing-masing model propeller ditampilkan pada tabel-tabel berikut.
Tabel 2 Rekapitulasi Mesh Size
Blade
Number Model Mesh Size Stop
i = n Type Nodes Elements
5
B5-416
Proximitive and Curves (Fine)
958842 5314284 321
B5-501 1002158 5554575 319
B5-476 1015125 5626895 319
Tabel 3 Rekapitulasi Nilai Thrust
Blade
Number Model
Thrust Hasil Optimasi
(kN)
Thrust Hasil Simulasi
(kN)
Error (%)
5
B5-416 170.465 167.109 1.97
B5-501 170.529 168.796 1.02
B5-476 170.031 168.341 0.99
Tabel 4 Rekapitulasi Nilai Tekanan
Blade
Number Model Pressure (Pa)
Minimum Maximum Average
5
B5-416 -1.669 x 106 3.850 x 105 -9.304 x 104 B5-501 -1.502 x 106 3.726 x 105 -9.047 x 104 B5-476 -1.467 x 106 3.711x 105 -8.971 x 104
4. KESIMPULAN
Berdasarkan proses optimasi dan simulasi CFD yang telah dilaukakan pada bab sebelumnya maka dapat diambil kesimpulan sebagai berikut:
1) Fungsi kendala dalam mendesain propeller KCR 60M dapat didefinisikan sebagai contraint function yang menyatakan kebutuhan thrust yang harus dihasilkan oleh propeller hasil optimasi. Nilai thrust yang dihasilkan oleh propeller harus sama dengan nilai thrust yang dibutuhkan oleh KCR 60M sehingga kondisi ini dijadikan sebagai fungsi kendala yang harus dipenuhi selama proses mendesain propeller KCR 60M. Program
optimasi multiobjektif akan melakukan looping hingga kondisi fungsi kendala terpenuhi.
2) Optimalisasi desain propeller KCR 60M dapat dilakukan dengan menggunakan program multiobjective genetic algorithm yang mampu menyelesaikan permasalahan multiobjektif yang dibatasi oleh constraint function dan boundary constraint. Nilai koefisien thrust (KT) dan efisiensi propeller (η) didefinisikan sebagai objective function dan diubah ke dalam bentuk negatif untuk memaksimalkan nilainya sehingga akan didapatkan nilai yang maksimum secara simultan.
3) Nilai KT yang paling optimal untuk model Z=3 dimiliki oleh model propeller B3-787 dengan nilai KT=0.213885, nilai KT optimum untuk model Z=4 dimiliki oleh model propeller B4-478 dengan nilai KT=0.232829, nilai KT optimum untuk model Z=5 dimiliki oleh model propeller B5-416 dengan nilai KT=0.241902, dan nilai KT optimum untuk model Z=6 dimiliki oleh model propeller B6- 570 dengan nilai KT=0.247746. η
4) Nilai η yang paling optimal untuk model Z=3 dimiliki oleh model propeller B3-316 dengan nilai η=0.723572, nilai η optimum untuk model Z=4 dimiliki oleh model propeller B4- 308 dengan nilai η=0.712045, nilai η optimum untuk model Z=5 dimiliki oleh model propeller B5-501 dengan nilai η=0.704038, dan nilai η optimum untuk model Z=6 dimiliki oleh model propeller B6-727 dengan nilai η=0.700149.
5) Hasil nilai thrust propeller setelah dilakukan optimasi mampu memberikan nilai sesuai dengan thrust yang dibutuhkan oleh KCR 60M. Kondisi ini dapat dicapai dengan menetapkan constraint function pada program optimasi. Sehingga model propeller dari hasil running optimasi mampu memberikan thrust sesuai dengan batasan yang telah didefinisikan pada constarint function tersebut.
6) Konfigurasi akhir dari propeller KCR 60M yang paling optimal didapatkan dari populasi Z yang memiliki nilai MSE terkecil. Nilai MSE terkecil dimiliki oleh populasi Z=5 dengan nilai 3.82032 x 10-7. Populasi Z=5 memiliki 3 model optimal yaitu B5-416, B5- 501, dan B5-476.
5. DAFTAR PUSTAKA
[1] E. Benini, “Multiobjective Design Optimization of B-Screw Series Propellers Using Evolutionary Algorithms,” Mar.
Technol. SNAME News, vol. 40, no. 4, pp.
229–238, 2003.
[2] G. Xie, “Optimal Preliminary Propeller Design Based on Multi-Objective Optimization Approach,” Procedia Eng., vol.
16, pp. 278–283, 2011.
[3] G. Prayogo, “Analisa Nilai Thrust Optimum Propeller B4-70, Ka4-70 dan Au4-59 pada Kapal Tug Boat Pelabuhan Paket-II 2x1850HP dengan Variasi Sudut Rake Menggunakan CFD,” Tek. Perkapalan, vol. 5, pp. 27–37, 2017.
[4] B. Lothar, “Fundamental of Ship Hydrodynamics. Fluid Mechanics, Ship Resistance and Propulsion,” vol. 1, no. 4, 2019.
[5] A. F. Molland, S. R. Turnock, and D. A.
Hudson, Ship Resistance and Propulsion.
2007.
[6] S. A. Harvlad, Resistance and Propulsion of Ship. 1972.
[7] M. W. C. Oosterveld and P. van Oossanen,
“Further Computer-Analyzed Data of The Wageningen B-Screw Series.,” Int. Shipbuild.
Prog., vol. 22, no. 251, pp. 251–262, 1975.
[8] W. F. Mahmudy and M. A. Rahman,
“Optimasi Fungsi Multi-Obyektif Berkendala Menggunakan Algoritma Genetika Adaptif Dengan Pengkodean Real,” J. Ilm. KURSOR, vol. 6, no. 1, pp. 19–26, 2011.
[9] K. Deb, Multi-Objective Optimization Using Evolutionary Algorithms, vol. 6, no. 5. 2001.