BAB III
PERENCANAAN SISTEM DAN PEMBUATAN ALAT
3.1 Pendahuluan
Dalam bab ini akan dibahas pembuatan seluruh sistem perangkat dari Sistem Miniatur Pintu Gerbang Kereta Api Dengan Identifikasi RFID, dimana secara garis besar terdapat dua bagian perangkat yang ada yaitu:
1. Perencanaan perangkat keras 2. Perencanaan perangkat lunak
Pada perencanaan perangkat keras akan meliputi penjelasan dari perencanaan diagram blok sistem, perencanaan sinyal inputan dan keluaran (input/output). Perencanaan perangkat lunak yang menggunakan Arduino Mega 2560 sebagai mikrokontroller dan RFID reader sebagai pembaca kartu atau tag.
Kombinasi kedua perangkat tersebut akan bekerja saling mendukung satu dengan lainnya sehingga alat yang direncanakan dapat berjalan sesuai dengan perencanaannya.
3.2 Blog Diagram
Sebelum menentukan dan membuat perangkat keras, terlebih dahulu dilakukan perencanaan blok diagram yang akan menjadi kerangka acuan dalam pembuatan alat aplikasi sesuai dengan yang diinginkan. Adapun blok diagram dari sistem tersebut adalah terdapat pada Gambar 3.1.
Gambar 3.1 Blok Diagram Sistem Secara Umum
Dari hasil Gambar 3.1 diatas adalah blok diagram dari rangkaian sistem.
Secara garis besar sistem terbagi dalam tiga bagian, yaitu masukan (input), proses data/program, dan keluaran (output). Bagian masukan (input) terdiri dari kartu RFID, dan RFID Reader. Sementara untuk keluaran (output) terdiri dari Display LCD 16x2, LED, Buzzer sebagai indikator, actuator selenoid, motor servo sebagai penggerak. Sedangkan mikrokontroller Arduino Mega 2560 digunakan sebagai kontrol utama untuk mengolah program data.
Kartu RFID
RFID Reader Arduino Mega
2560
Servo
Buzzer
LED
Relay
LCD
Actuator
INPUT PROSES OUTPUT
3.2.1 Keterangan Sistem Kerja Komponen Pada Alat
Alat ini dirancang dengan memiliki alur proses pengontrolan.
Pengontrolan dimulai dengan proses identifikasi, yakni inputan data yang berupa masukan dari RFID reader ketika mendeteksi keberadaan kartu RFID, inputan berupa data (nomor serial kartu) ini masuk ke mikrokontroller dan dibandingkan dengan data (nomor serial) yang telah dimasukkan/didaftarkan ke dalam program. Jika data dinyatakan valid, maka mikrokontroller akan memberikan perintah eksekusi ke motor servo untuk membuka pintu gerbang dan menggeser jalur kereta api. LCD digunakan sebagai indikator untuk mengetahui kereta apa yang akan masuk ke dalam stasiun dan jalur berapa yang akan dilintasi kereta api.
3.3 Perencanaan Elektrikal
Dalam perencangan dan pembuatan alat Miniatur Pintu Gerbang Kereta Api dengan RFID identifikasi, selain menggunakan Arduino Mega 2560 sebagai kontrol utama, juga menggunakan komponen lain sebagai komponen pendukung.
3.3.1 Rangkaian Pintu Gerbang
Rangkaian seperti Gambar 3.2 ini berfungsi untuk membuka pintu gerbang kereta api secara otomatis dan menggeser jalur kereta api secara otomatis dengan menggunakan RFID. Rangkaian ini menggunakan sebuah Reader RFID yang terhubung di samping rel kereta api sebelum pintu gerbang kereta api. Reader RFID tersebut berfungsi untuk menerima suatu energi yang dipancarkan oleh kartu RFID agar mendapatkan suatu data
0
samping untuk membuka pintu gerbang kereta api dan kembali ke posisi 00 untuk menutup kembali pintu gerbang kereta api. Rangkaian ini terdapat pada Gambar 3.2.
Gambar 3.2 Rangkaian Pintu Gerbang
3.3.2 Rangkaian Wesel Jalur Kerera Api
Rangkaian seperti Gambar 3.3 ini berfungsi untuk memindahkan jalur kereta secara otomatis dengan menggunakan RFID. Rangkaian ini juga menggunakan Reader RFID yang terhubung di samping rel kereta api sebelum wesel jalur kereta api. Reader RFID berfungsi untuk menerima suatu energi yang dipancarkan oleh kartu RFID agar mendapatkan suatu data masuk yang telah di program. Setelah itu selenoid actuator akan mendapat tegangan 12V dan bergerak mundur dan menarik wesel sejauh 5mm. Ketika actuator selenoid sudah tidak mendapatkan tegangan 12V,
actuator selenoid akan kembali bergerak maju menggunakan per pegas sejauh 5mm. Rangkaian ini terdapat pada Gambar 3.3.
Gambar 3.3 Rangkaian Wesel Kereta Api
3.3.3 Rangkaian Regulator
Power supply digunakan sebagai catu daya dan merupakan bagian yang sangat penting karena tanpa adanya catu daya maka rangkaian elektronik tidak akan bekerja. Power supply adalah sebuah perangkat rangkaian tenaga listrik dari sumber trafo yang akan disalurkan ke seluruh komponen. IC power ini menggantikan sebuah baterai.
Gambar 3.4 Simulasi Rangkaian Regulator
Keluaran dari sebuah IC regulator ini adalah 12V. Dan untuk komponen tugas akhir ini membutuhkan tegangan 12V dan 5V, maka untuk tegangan 5V digunakan UBEC (Universal Baterrey Elimination Circuit) yang menghasilkan tegangan 5V. Perancangan regulator dapat dilakukan dengan menggunakan software ISIS terdapat pada Gambar 3.4.
Rangkaian regulator yang digunakan terlihat pada Gambar 3.5.
Gambar 3.5 Rangkaian Power Supply Adaptor dan UBEC
3.3.4 Rangkaian Mikrokontroler
Mikrokontroler yang digunakan pada tugas akhir ini adalah arduino mega 2560. Arduino ini terhubung dengan regulator sebagai input tegangan 12V. Pada arduino mega 2560 ini terhubung dengan komponen elektronika LCD 16x2, motor servo, RFID, Led, actuator selenoid, relay,
dan buzzer, melalui pin – pin yang terdapat pada arduino mega 2560.
Mikrokontroler arduino terdapat pada Gambar 3.6.
Gambar 3.6 Rangkaian Mikrokontroler
3.4 Perancangan Perangkat Keras (Hardware)
Perancangan perangkat keras ini meliputi pembuatan simulasi pintu gerbang dan wesel jalur kereta secara otomatis serta lintasan kereta api dengan menggunakan bermacam-macam bahan yang digunakan.
3.4.1 Pintu Gerbang Otomatis
Dalam simulasi ini pintu gerbang dibuat menggunakan sebuah kayu tusuk es cream. Pintu gerbang dirancang agar dapat bergerak berputar 900 ketika reader RFID menerima sinyal energi data dari sebuah kartu RFID. Pada sisi sebelum pintu gerbang kereta api dipasang sebuah reader RFID. Hasil pembuatan pintu gerbang ini terdapat pada Gambar
Gambar 3.7 Hasil Pintu Gerbang Otomatis
3.4.2 Indicator
Dalam simulasi ini indikator berupa LED berbentuk bohlam dan LED strip, serta buzzer yang berjumlah untuk jalur kereta api jalur satu dan jalur dua terdapat 8 buah LED bohlam, 4 buah LED strip, dan 2 buah buzzer. Disimulasi ini indicator berfungsi sebagai penanda pintu gerbang akan dibuka dan dipasang pada stasiun kereta api yang akan dilintasi.
(a)
(b)
Gambar 3.8 (a) Indikator LED bohlam (b) Indikator LED strip dan buzzer
3.4.3 Miniatur Lintasan Kereta Api
Lintasan kereta api pada alat ini diletakkan pada sebuah papan sebagai alasnya. Ukuran alas ini adalah 295 cm x 125 cm. Sedangkan lintasan kereta api yang digunkan membentuk sebuah oval dengan panjang rel 290 cm dan lebar rel 112 cm. Pada alat ini terdapat sebuah pintu gerbang dan wesel jalur kereta api yang akan membuka dan menutup pintu gerbang secara otomatis. Dan wesel jalur akan menarik mundur sejauh 5mm dan maju kembali sejauh 5 mm secara otomatis kerika kereta api kelas exekutif dan kelas bisnis tiba seperti pada Gambar 3.9.
Gambar 3.9 Hasil Lintasan Kereta Api
3.5 Pemrograman
Perancangan pada umumnya dilakukan pada tahap akhir, setelah perancangan mekanik dan elektrik terselesaikan. Karena dalam proses pemrograman pada umumnya programer melakukan dengan cara uji coba.
Sehingga untuk melakukannya komponen perangkat harus dapat dioperasikan.
Pemrograman adalah memasukkan suatu informasi atau kode-kode (coding) kedalam suatu mikrokontroler. Dimana diharapkan alat dapat beroperasi sesuai dengan kemauan pemiliknya atau perencanaan awal sebelum dibuat.
Dengan memanfaatkan suatu mikrokontroler Arduino Mega 2560, lintasan rel kereta api ini diprogram sedemikian rupa sesuai fungsinya. Program yang dibuat meliputi pemrograman motor servo, LCD, LED, Buzzer, RFID dan Relay.
Untuk lebih jelasnya, berikut akan dipaparkan mengenai pemrograman tiap-tiap
Pemrograman terlebih dahulu harus di download ke dalam mikroprosessor sebagai kontrol utamanya. Bahasa pemrograman mikroprosessor yang umum dan banyak digunakan adalah bahasa C. Oleh karenanya, dalam proyek ini penulis akan mencoba mengimplementasikan simulasi sistem dengan basis bahasa C.
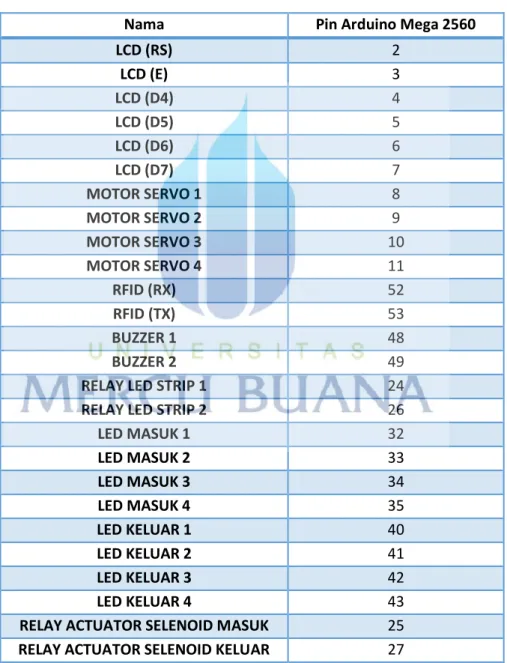
Sebagai berikut daftar tabel dalam pemrograman terdapat pada Tabel 3.1.
Tabel 3.1 Kaki Pemrograman Pada Arduino Mega 2560
Nama Pin Arduino Mega 2560
LCD (RS) 2
LCD (E) 3
LCD (D4) 4
LCD (D5) 5
LCD (D6) 6
LCD (D7) 7
MOTOR SERVO 1 8
MOTOR SERVO 2 9
MOTOR SERVO 3 10
MOTOR SERVO 4 11
RFID (RX) 52
RFID (TX) 53
BUZZER 1 48
BUZZER 2 49
RELAY LED STRIP 1 24
RELAY LED STRIP 2 26
LED MASUK 1 32
LED MASUK 2 33
LED MASUK 3 34
LED MASUK 4 35
LED KELUAR 1 40
LED KELUAR 2 41
LED KELUAR 3 42
LED KELUAR 4 43
RELAY ACTUATOR SELENOID MASUK 25 RELAY ACTUATOR SELENOID KELUAR 27
3.5.1 Pemrograman Posisi Awal
Pada posisi awal ketika semua rangkaian mendapat sumber tegangan 12V dan 5V maka komponen tersebut akan bekerja dengan tidak beraturan. Maka dari itu pemrograman untuk posisi awal itu sangat diperlukan untuk menentukan posisi awal atau sistem kerja yang diinginkan. Sebagai hasil pemrograman posisi awal terdapat pada Gambar 3.10.
Gambar 3.10 Hasil Pemrograman Posisi Awal
3.5.2 Pemrograman LCD
Data file yang digunakan terdapat pada library ini membahas cara sebuah kerja pemrograman LCD. Prinsip kerja dalam sebuah pemrograman LCD ini hanya sebagai indikator output data yang diperintahkan oleh arduino mega 2560. Sebagai hasil terdapat pada Gambar 3.11.
Gambar 3.11 Hasil Pemrograman LCD
3.5.3 Pemrograman RFID
Dalam pemrograman library ini akan dibahas sebuah hasil dari sebuah program untuk RFID. Program ini sebagai perintah yang akan di jalankan oleh sebuah RFID ketika mendapatkan suatu sinyal data yang diterima oleh reader RFID akan terhubung tag RFID. Perintah ini adalah
pantulkan kembali terdapat reader. Sebagai hasil pemrograman RFID dalam library terdapat pada Gambar 3.12.
(a)
(b)
Gambar 3.12 (a) Hasil Pemrograman Ketika Kereta Datang (b) Hasil Pemrograman Ketika Kereta Pergi
3.6 Flowchart
Sistem kerja secara keseluruhan dapat dilihat pada struktur dalam flowchart Gambar 3.13 di bawah ini. Saat pertama kali sistem disambungkan ke sumber teganga, maka sistem akan berada dalam kondisi awal, dimana seluruh alat yaitu motor servo sebagai penggerak pintu gerbang dalam keadaan posisi 900 (pintu gerbang tertutup), kecuali RFID reader akan berada pada kondisi standby untuk menerima sinyal dari kartu akses sewaktu-waktu.
Saat RFID reader 1 mendeteksi adanya kartu akses, maka sistem akan memeriksa tag RFID berapa yang terdeteksi. Jika tag RFID 1 yang terbaca maka, pintu gerbang jalur 1 yang akan terbuka, dan sebaliknya jika tag RFID 2 yang teridentifikasi maka pintu gerbang jalur 2 yang akan terbuka. Jika RFID reader tidak mendeteksi tag RFID maka pintu gerbang akan tetap tertutup. Setelah kereta api melewati pintu gerbang stasiun dan tag RFID 3 atau tag RFID 4 akan teridentifikasi lagi oleh RFID reader setelah stasiun. Maka pintu gerbang kereta api akan menutup kembali. Jika tag RFID tidak teridentifikasi, maka pintu gerbang akan tetap terbuka.
Setiap kereta akan memakai tag RFID yang berbeda-beda, untuk membedakan kelas kereta api tersebut dan jalur berapa kereta api akan melintas di stasiun dan pintu gerbang jalur berapa yang akan terbuka dan menutup pintu gerbang kereta api. Sebagai berikut struktur flowchart sebuah perintah yang terdapat pada Gambar 3.13.
Gambar 3.13 Gambar Flowchart START
RFID 1
TAG RFID
DATA COCOK DI DATABASE
SERVO MEMBUKA PINTU GERBANG
RFID 2
TAG RFID
DATA COCOK DI DATABASE
SERVO MENUTUP PINTU GERBANG
FINISH YES
NO NO
YES