APLIKASI SISTEM KONTROL PNEUMATIK PADA
ROBOTIKA (BAGIAN 1)
Bambang Supeno
Staf Pengajar Teknik Elektro Fakultas Teknik Universitas Jember
Perum Sumber Alam D-7 Jember 68121
Abstract
Automatic control system (sistim kontrol otomatis) telah memegang peranan yang sangat penting dalam perkembangan ilmu pengetahuan dan teknologi (IPTEK). Secara global sistim ini sangat berperan dalam pengendalian pesawat ruang angkasa, peluru kendali, penge-mudian pesawat, kecepatan & kendali mobil, antena komunikasi, dalam industri dan lain-lain. Sebagian besar perkembangan yang terjadi dalam sistim kendali/kontrol yang modern adalah mengarah pada kontrol optimal untuk sistim determenistik dan stokastik, kontrol adaptif dan kontrol penalaran (learning control) untuk sistim yang lebih kompleks. Aplikasi teori kontrol modern dalam bidang non-teknik seperti biologi, ekonomi, kedokteran, dan sosiologi sekarang lebih banyak dilakukan. Dengan adanya kemajuan komputer, baik analog, digital maupun hybrid dapat dipergunakan pada perhitungan-perhitungan yang kompleks. Sehingga, penggunaan komputer dalam disain sistim kontrol serta dalam sistim plug-in pada sistim kontrol sangat banyak dijumpai. Secara garis besar, suatu sistim kontrol harus memenuhi 3 syarat yaitu, input/masukan, control process, dan output/keluaran. Khusus dalam bidang industri, sebagai contoh, kontrol otomatis sangat diperlukan dalam operasi-operasi di industri untuk mengontrol tekanan, temperatur, kelembaban, viskositas dan aliran dalam industri proses serta penekanan udara dalam hubungannya dengan gaya dan luas area. Hal terakhir inilah yang disebut dengan proses pneumatic yang prinsip utamanya adalah : usaha mekanik yang masuk sama dengan usaha mekanik yang keluar dengan diikuti panas (Win = Wout + Cal).
Keywords : automatic control system, learning control, input/output, pneumatic control process
Pendahuluan
Kontrol automatik telah banyak dimanfaatkan dalam perkembangan ilmu dan teknologi, sebagai contoh sering digunakan pada pesawat ruang angkasa, peluru kendali, sistem pengemudi pesawat, dan juga telah menjadi bagian yang penting dan terpadu dari proses – proses dalam pabrik dan industri moderen. Karena kemajuan dari teori dan praktik, kontrol automatik memberi kemudahan dan mendapat performasi dari sistem dinamik, mempertinggi kualitas dan menurunkan biaya produksi, mempertinggi laju produksi, dan meiadakan pekerja rutin.
Seiring dengan perkembangan IPTEK yang luar biasa pesatnya, system pneumatik juga diaplikasikan secara khusus pada proses gerakan sistem robotika. Dalam hal ini terkait langsung dengan proses pergerakan robot mobile (moving robotics) yang disesuaikan dengan kebutuhan pengguna (user). Pada artikel bagian pertama ini, akan dibahas dasar-dasar secara umum dari pneumatik. Aplikasi secara langsung pada mekanik robot akan dibahas pada bagian kedua.
Secara sederhana prinsip dari kontrol automatik, yaitu membandingkan nilai yang sebenarnya dari keluaran sistem ecara keseluruhan ( plant ) dengan mengacu pada masukan ( nilai yang dikehendaki ), menentukan penyimpangan dan menghasilkan sinyal kontrol yang akan mengurangi penyimpangan menjadi nol ( nilai yang kecil ). Cara kontroler automatik dengan menghasilkan sinyal kontrol dinamakan Sinyal pengontrolan.
Pengontrolan automatik di Industri dibedakan sesuai dengan aksi pengontrolan nya , yaitu :
1) Kontroler dua posisi ON-OFF
Sistem kontroler ini merupakan elemen pembangkit yang hanya mempunyai dua posisi, yaitu ON dan OFF. Kontrol ini juga relatif murah dan sederhana.
2) Kontroler Proposional
Sistem ini berhubungan dengan masukan kontroler u(t) dan sinyal pembangkit kesalahan e(t).
u(t) e(t)
3) Kontroler Integral
Pada kontrol ini nilai masukan kontroler u(t) diubah pada laju proposional dengan sinyal pembangkit kesalahan e(t).
(t) Ke(t)
dt du
i
4) Kontroler proposional ditambah integral
Kontroler ini didefiisikan dalam persamaan :
p te t dt Ki Kp t e K t u 0 ( ) ) ( ) (
5) Kontroler proposional ditambah turunan
Didefinisikan dalam persamaan : dt t de Td K t e K t u( ) p ( ) p ( )
Sistem ini merupakan kombinasi dari kontroler proposional, kontroler integral, dan kontroler turunan dengan persamaan :
t o p i p p dt t de Td K dt t e T K t e K t u( ) ( ) ( ) ( )
Pada artikel ini, akan dibahas tentang pengontrolan pada sistim pneumatik. Disini akan dijelaskan kontroler pneumatik, jenis kontroler pneumatik dan relay pneumatik.
Kontroler Pneumatik
Perbandingan sistem Pneumatik dengan sistim Hidrolik
Seperti yang telah dijelaskan di pendahuluan, bahwa sistim ontroler telah berperan penting dalam perkembangan ilmu dan teknologi termasuk bagian dari proses pabrik dan Industri.
Sebagai media yang paling berguna untuk menyalurkan sinyal dan daya, fluida, baik dalam bentuk cairan atau gas mempunyai banyak kegunaan dalam Industri. Dalam bidang rekayasa, istilah pneumatik menjelaskan tentang sistim fluida yangmenggunakan udara atau gas. Dan hidrolik berlaku untuk sistim yang menggunakan minyak pelumas atau oli.
Sistim pneumatik digunakan secara ekspensif dalam otomatisasi mesin- mesin produksi dan dalam bidang kontroler otomatis, misalnya rangkain pneumatik yang mengubah energi udara dan dimanfaatkan menjadi energi mekanik yangdigunakan secara luas.
Perbedaan antara kedua sifat fluida antara pneumatik dan hidrolik menjadikan karakteristik perbedaan antara keduanya, diantaranya :
1) Udara dan gas dapat dimampatkan, sedangkan oli tidak dapat dimampatkan .
2) Udara kekurangan sifat pelumas dan selalu mengandung uap air. Funsi oli adalah sebagai fluida hidrolik dan juga pelumas.
3) Tekanan operasi normal sistem pneumatik jauh lebih rendah dari pada sistem hidrolik.
5) Sistem pneumatik tahan api dan ledakan. Sedangkan sistem hidrolik tidak tahan api.
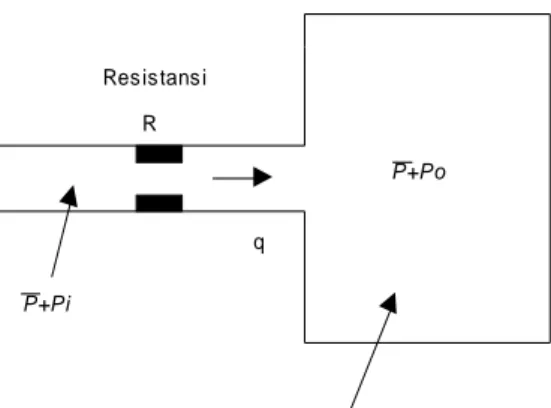
Kontroler pneumatik tekanan rendah untuk sistem Industri telah digunakan secara ekspensif. Hal ini dikarenakan sifat tahan ledakan, kesederhanaan,dan perawatan yang mudah. Beberapa proses Industri dan kontroler pneumatik melibatkan aliran gas atau udara melalui jaluran pipa penghubung dan tangki – tangki tekanan. Tujuan sistem ini adalah ditunjukkan pada gambar 1 aliran gas melalui penghalang adalah fungsi dari beda tekanan gas. Tekanan semacam ini dapat diartikan dalam benyuk tahanan da kapasitansi.
Gambar 1; Diagram skematik suatu sistem tekanan
Relay pneumatik
Dalam praktik kontroler pneumatik, penguat nosel pengelepak bekerja sebagai penguat tingkat petama dan relay pneumatik merupakan penguat tingkat kedua. Relay pneumatik dapat digunakan untuk mengatasi aliran udara yang besar.
Diagram skematik relay pneumatik ditunjukkan pada gambar 2. Bila teknan nosel Pb bertambah, katup diafragma bergerak kebawah menyebakan
saluran ke udara luar mengecil dan saluran katup pneumatik membesar, sehingga P+Po R Res is tans i P+Pi Kapas istansi q
menambah tekanan kontrol Pc. jka katup diafragma menutup saluran udara luar,
tekanan kontrol akan Pc menjadi sama dengan tekanan suplai Ps.
Ada jenis relay lain, yaitu relay “ non aliran” ( gambar 3). Pada jenis ini aliran udara ke atmosfir akan terhenti apabila dicapai kondisi keseimbangan. Dengan demikian tidak ada kehilangan udara tekanan pada operasi keadaan tunak. Meskipun demikian relai jenis ini harus memiliki pengaman atmosfir untuk membebaskan tekanan kontrol dari katup peggerak pneumatik.
Gambar 2; Diagram skematik relay jenis pneumatik
ke kutup pneumatik ( Pc ) ke atmosfer
pemasok udara
Gambar 3; Diagram skematik relay jenis nonaliran
Pada kedua jenis relay ini, catu udara dikontrol oleh satu kutup yang mendapatkan pilran dikontrol oleh tekanan balik nosel. Jadi tekanan balik nosel diubah menjadi tekanan kontrol dengan penguat daya.
Ke atmos fer
k e k atup pneomatik
s uplai udara tekanan balik nos el
Perlu diperhatikan bahwa beberapa relay pneumatik mempuyai cara kerja terbalik (Gambar 4). Prinsip kerja dari relay terbalik ini adalah dengan
meningkatnya tekanan kembali nosel Pb, katup bola dipaksa ke arah dalam lebih
rendah dengan mengurangi tekana kontrol Pc.
Gambar 4; Diagram skematik relay dengan cara kerja terbalik
Jenis kontroler pneumatik
Pengontrolan pneumatik memiliki 2 jenis kontroler, yaitu :
1 kontroler pneumatik jenis gaya-jarak ( Proposional )
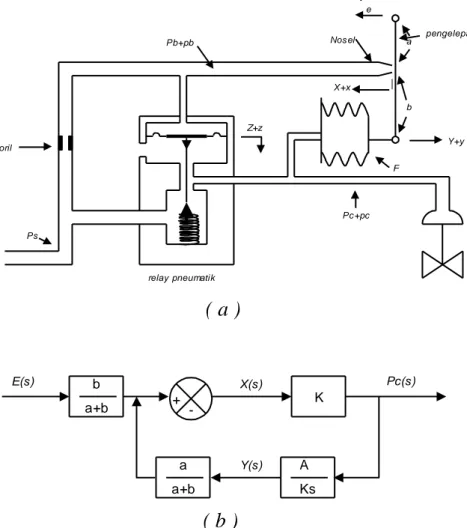
Ganbar 5 menunjukkan skematik kontroler proposional. Kontrol ini menggunakan penguat nosel pengelepak yang merupakan penguatan tingkat pertama, sedangkan tekanan balik nosel dikontrol oleh jarak nosel pengelepak ( gambar 6 ). Tekanan balik nosel menentukan posisi katup bola.
ke kutup pneumatik ( Pc ) ke atmosfer
pemasok udara tekanan balik nosel
Pada sebagian besar kontroler pneumatik, digunakan beberapa jenis umpan balik pneumatik. Umpan balik pneumtik memperkecil besar pergerak yang sebenarnya. Besarnya umpan balik dapat diatur dengan menambah suatu variabel penghubung diantara pengembus umpan balik dan titik sambung pengelepak.
( a )
( b )
Gambar 5; ( a )Diagram skematik jenis gaya – jarak kontroler pneumatik proposional, dan ( b ) diagram balok untuk kontroler pneumatik jenis gaya-jarak.
Pengoperasian kontroler dari gambar 5 adalah sebagai berikut sinyal masukan ke penguat pneumatik dua tingkat adalah sinyal kesalahan penggerak. Kenaikan sinyal akan menggrakkan penggerak kekiri , selanjutnya ini akan memperkecil tekanan balik nosel. Sehingga pengembus B akan mengalami kontraksi yang mengakibatkan katip bola bergerak kebawah dan tekanan kontrol
Pb+pb
lubang poril
relay pneumatik
Nos el
Sinyal k es alahan ak tuas i
pengelepak X+x Y+y F Pc +pc e a b Z+z Ps b a+b a a+b + -A Ks K E(s) X(s) Y(s) Pc(s)
akan membesar. Kenaikan ini menyebabkan pengembus F mengalami ekspansi dan menggerakkan penggerak kekanan menutup nosel.
Gambar 6; Diagram skematik pneumatik nosel-pengelepak.
Harus diperhatikan, beberapa pengoperasian yang benar dari kontroler memerlukan umpan balik untuk menggerakkan pengelepakan kurang dari greakan yang disebabkan oleh sinyal kesalahan.
2 Kontroler pneumatik jenis keseimbangan -gaya
Skematik kontroler pneumatik jenis keseimbangan ditunjukkan pada gambar 7.. Kontroler ini digunakan secara luas di Industri dan disebut dengan kontroler cerobong. Prinsip dasar dari operasi kontoler ini tidak berbeda dengan kontroler jeis gaya – jarak. Keuntungan dari jenis ini adalah tidak terdapat beberapa hubungan mekanis dan katup sehingga memperkecil efek gesekan.
Prinsip kerjanya adalah pada kontroler ini tekanan masukan acuan Prdan
tekanan keluaran Po digunakan untuk diafragma. Kontroler sebnding beroperasi
hanya pada sinyal tekanan. Oleh krena itu diperlukan konversi masukan acuan dan keluaran sistem untuk menggabungkan sinyal –sinyal tekanan. Seperti halnya kontroler gaya-jarak, kontroler ini juga mengunakan pengelepak, nosel dan lubang. Dari pemasokan udara, udara dialirkan sehingga menyebabkan tekanan pada dasar ruang. Udra dalam ruangan tersebut keluar melalui nosel. Penambahan tekanan masukan acuan Pr dan tekanan keluaran Po tetap menyebabkan katup
bergerak ke bawah mengurangi lebar nosel dan pengelepakan pengembus, dan juga tekanan kontrol Pe bertambah.
Masukan Pb X Pengelepak Nosel Ke katup pengukur Lubang pori pemasok udara Ps
Gambar 7; Diagram skematik jenis keseimbangan gaya kontroler pneumatik proporsional
Kesimpulan
Kelemahan utama dari penggerak pneumatic adalah ketidakmampuannya untuk menghasilkan gaya yang cukup besar seperti halnya pada sistim hidrolik. Sistim Pneumatik memiliki beberapa kelebihan dibandingkan sistim hidrolik, antara lain yaitu :
1. Sistim pneumatic umumnya lebih murah dari sistim hidrolik yang ekivalen.
2. Tidak boleh ada kebocoran dalam sistim hidrolik, tetapi pada sistim pneumatic masih ditoleransi.
3. Karena menggunakan sistim pemampatan udara, katup pelepas tekanan dapat pula digunakan untuk menurunkan tekanan pada saat terjad gaya yang lain. Prinsip ini dapat diterapkan oleh penggenggam pada robot untuk melindungi kerusakan yang ungkin terjadi.
4. Penggerak pneumatic memiliki respon yang lebih cepat dari penggerak hidrolik.
atmosfer
Tekanan masukan acuan
Tekanan keluaran Pemasok udara P1 = k (Pc +pc) A1 A2 Pr X+x Pc+pc Tekanan kontrol A1 Po
Daftar Pustaka
1.Sharon, D. “Robot dan Otomasi Industri”.Elexmedia Komputindo – Gramedia. Jakarta. 1992.
2. Kuo, Benjamin, C. “Teknik Kontrol Automatik”. PT.
Prenhalindo.Jakarta.1995
3. Pakpahan, S. “Kontrol Otomatik : Teori dan Penerapan “. Penerbit Erlangga. Jakarta. 1987.
4. Ogata, Katsuhiko. “Teknik Kontrol Automatik (Sistim Pengaturan) Jilid 1”. Penerbit Erlangga. Jakarta. 1991.
5. Gayakwad, Ramakant. A. “ Op – Amps And Linear Integrated Circuits “ , Third Edition, Prentice-Hall, Inc, New Jersey 1993.