PROPOSAL
PENELITIAN UNGGULAN ITS (TERAPAN MULTIDISIPLIN)
DANA ITS TAHUN 2020
FUNCTIONAL ELECTRICAL STIMULATION (FES) CYCLING
EXERCISE SYSTEM BERBASIS FUZZY LOGIC CONTROL UNTUK
PASIEN PASCA STROKE
Tim Peneliti:
Ketua: Dr. Achmad Arifin, S.T., M.Eng.
Departemen Teknik Bimedik, Fakultas Teknologi Elektro dan
Informatika Cerdas, ITS
Anggota 1: Muhammad Hilam Fatoni, S.T., M.T.
Departemen Teknik Bimedik, Fakultas Teknologi Elektro dan
Informatika Cerdas, ITS
Anggota 2: Ellya Zulaikha, ST, M.Sn, Ph.D.
Departemen Desain Produk, Fakultas Desain Kreatif dan Bisnis Digital,
ITS
Anggota 3: Eko Agus Suprayitno, S.T., M.T,
Departemen Teknik Bimedik, Fakultas Teknologi Elektro dan
Informatika Cerdas ITS
Mitra: Andra Risciawan, Manufaktur Robot Indonesia
Anggota Mahasiswa: Rizky Mayardiyah Syafitri Pandiangan
Departemen Teknik Bimedik, Fakultas Teknologi Elektro dan
Informatika Cerdas, ITS
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2020
1
DAFTAR ISI
Daftar Isi 1 Daftar Tabel 2 Daftar Gambar 3 Daftar Lampiran 4 Bab I Ringkasan 5Bab II Latar Belakang 7
Bab III Tinjauan Pustaka 10
Bab IV Metode 17
Bab V Jadwal dan Rencana Anggaran Biaya 21
Bab VI Daftar Pustaka 24
2
DAFTAR TABEL
Tabel 4.1 Fuzzy Rule Set 18
Tabel 4.2 Tahapan pelaksanaan penelitian 19
Tabel 5.1 Jadwal Penelitian 21
3
DAFTAR GAMBAR
Gambar 3. 1 Skematik Rangkaian Boost Converter 10
Gambar 3.2 Blok Diagram Sistem Loop Tertutup 11
Gambar 3. 3 Sistem Mekanik Lima-sudut 12
Gambar 3. 4 Ilustrasi Sudut saat Gerakan 12
Gambar 3.5 Tahapan dalam Sistem Fuzzy 13
Gambar 3. 6 Fishbone Diagram Penelitian 15
Gambar 4. 1 Diagram Blok Sistem 16
Gambar 4.2. Model Cycling Machine 16
4
DAFTAR LAMPIRAN
Biodata Ketua Peneliti 24
Biodata Anggota Peneliti 26
5
BAB I RINGKASAN
1.1 Latar Belakang PenelitianPenyakit stroke menyebabkan sebagian besar penderitanya mengalami paralysis pasca stroke berupa kehilangan kemampuan menggerakkan organ motorik seperti kaki dan tangan akibat hilangnya sinyal perintah motorik dari otak. Hal ini menyebabkan degenerasi sistem motorik yang hilangnya kemampuan kontraksi otot untuk menghasilkan gaya otot untuk pergerakan. Paralysis dapat diatasi dengan terapi baik terapi fisik maupun terapi elektrik. Terapi fisik dilakukan pada awal penyembuhan pasca stroke untuk melawan kekakuan sendi (spaticity), sedangkan terapi elektrik dengan menggunakan Functional Electrical Stimulation (FES) untuk menormalisasi sistem syaraf motorik yang mengalami kerusakan selama serangan stroke. Pemulihan kemampuan gerak pasien pasca stroke merupakan bagian dari bidang fokus penelitian kami di Laboratorium Biocyberrnetics Departemen Teknik Biomedik ITS karena rehabilitasi dengan FES membutuhkan keterlibatan closed-loop system control dan meregulasi pola stimulasi FES pada otot subject. Gerakan cycling merupakan gerakan dasar pada lower limb, sehingga dengan merehabilitasi kemampuan gerak dasar, diharapkan dapat mengembalikan kemampuan functional movement pada lower limb pasien pasca stroke.
1.2 Tujaun Penelitian
Tujuan penelitian ini adalah untuk mendisain sistem latihan cycling FES untuk pasien pasca stroke. Sistem berupa platform kursi roda berpedal yang dapat dikayuh dilengkapi dengan unit FES sebagai penghasil artificial electrical stimulation dan controller unit berbasis fuzzy logic controller untuk mengendalikan parameter stimulator sesuai dengan capaian dari poses cycling. Sistem yang didisain akan menjadi prototype rehabilitasi FES cycling pasca stroke di ITS sehingga dapat digunakan untuk langkah lanjutan penelitian klinis. Aspek ilimiah dapat dikembangan dalam hal pengembangan platform mekanik FES cycling exercise system, pengembangan portable FES system, dan metoda fuzzy controller yang meliputi penentuan variabel dalam disain, iterasi disain, dan performance evaluation. FES cycling exercise ditujukan agar dapat digunakan di rumah dengan sedikit atau tanpa bantuan terapis sehingga meningkatkan kenyamanan bagi pasien pasca stroke.
1.3 Tahapan Metode Penelitian
Pada penelitian ini akan dikembangkan untuk pemulihan fungsi alat gerak bawah pada latihan gerakan mengayuh pedal seperti orang bersepeda yang sering disebut FES cycling exercise. Gerakan mengayuh pedal melibatkan banyak otot sebagaimana gerakan berjalan. Selain itu, gerakan mengayuh tidak memerlukan kontrol keseimbangan yang rumit karena dilakukan dalam posisi duduk sehingga dinilai lebih aman. Besarnya stimulus FES yang diberikan pada otot kaki ditentukan menggunakan logika fuzzy dengan memanfaatkan sudut kayuh (crank angle) yang diakuisisi melalui rotary encoder. Pengembangan metode ini ditujukan untuk memberi variasi terapi alat gerak bawah pada pasien pasca stroke. Selain itu, penggunaan FES cycling exercise juga diharapkan mampu meningkatkan kondisi sistem kardiovaskular dan pulmonari karena pasien akan menggerakkan lebih banyak otot, sehingga jantung akan memompa darah lebih cepat dan paru-paru akan mengambil oksigen lebih banyak untuk memenuhi kebutuhan oksigen tubuh. Tahapan dalam panelitian ini meliputi (i) disain platfotm cycling (ii) disain unit multichannel portable functional electrical stimulation (iii) disain fuzzy logic controller (iv) performance evaluation system (v) expermient with normal subjects (vi) experiment with paralyzed subject
1.4 Luaran
Luaran yang ditargetkan pada penelitian ini berupa system prototype FES cycling exercise dengan kendali fuzzy logic controller yang dalam tahapan yang diuusulkan akan direalisasikan dan diujicoba. Luaran yang lain berupa aspek ilmiah dari proses disain dan performance evaluation dalam bentuk makalah pada international conference maupun pada international journal.
6 1.5 Kata kunci
7
BAB II LATAR BELAKANG
2.1 Latar belakangStroke merupakan penyakit akibat gangguan peredaran darah pada otak yang dipengaruhi oleh banyak faktor risiko terdiri dari yang tidak dapat diubah berupa usia dan jenis kelamin serta yang dapat diubah seperti hipertensi, peningkatan kadar gula darah, dyslipidemia, dan pekerjaan. Stroke merupakan penyakit terbanyak ketiga setelah penyakit jantung dan kanker dengan angka kematian penderita stroke di Amerika setiap tahunnya adalah 50 – 100 dari 100.000 orang penderita menurut American Heart Association (AHA) [1]. Di Indonesia sendiri, dari seluruh penderita stroke yang ada, stroke iskemik merupakan jenis yang paling banyak diderita yaitu sebesar 52,9%, diikuti secara berurutan oleh pendarahan intraserebral, emboli dan pendarahan subaraknoid dengan angka kejadian masing-masingnya sebesar 38,5%, 7,2%, dan 1,4% [2].
Selain menjadi penyebab kematian, stroke juga merupakan penyakit penyebab kecacatan tertinggi di dunia. Terdapat 33 juta orang di dunia yang diperkirakan pernah menderita kecacatan pasca stroke seperti ketidakseimbangan postur tubuh, pelemahan otot pada alat gerak baik atas maupun bawah, dan kelumpuhan baik sebagian (hemiplegic) atau seluruh (tetraplegic) alat geraknya[3]. Pasien pasca stroke yang mengalami kelumpuhan sebagian sering kali menggunakan kursi roda sebagai alat bantu mobilisasinya. Hal ini menyebabkan penurunan kesehatan pada penderita stroke karena tubuh dan kaki yang tidak digerakkan akan menyebabkan kekakuan pada otot. Selain itu, minimnya gerakan yang dilakukan pasien stroke juga menyebabkan penurunan fungsi kardiovaskular dan pulmonari. Rendahnya tingkat kebugaran tubuh seringkali juga menghasilkan partisipasi sosial dan kualitas hidup yang rendah. Sehingga, diperlukan terapi atau latihan pasca stroke pada pasien untuk merestorasi fungsi dari alat gerak tubuhnya.
Pada kasus fisioterapi alat gerak bawah, tidak banyak pasien yang mampu melakukan terapi berjalan atau berdiri karena terjadinya pelemahan atau kelelahan otot sehingga fisioterapi saja dirasa kurang maksimal. Selain itu, terapi duduk juga dianggap cukup membosankan karena kurangnya variasi gerakan saat terapi. Oleh karena itu, dipakai bantuan stimulasi berupa FES (Functional Electrical Stimulation). FES merupakan teknik terapi yang berfungsi membuat otot berkontraksi dengan cara memberikan stimulasi berupa arus listrik lemah dalam bentuk pulsa-pulsa [4]. Penggunaan sistem closed-loop FES didasarkan untuk meminimalkan kelelahan otot karena stimulasi listrik yang berlebih atau tidak sesuai, sehingga digunakan kontroler berupa sensor untuk dijadikan feedback pada sistem. Salah satu terapi berbasis FES yang dipelajari yaitu terapi untuk gerakan mengayuh pedal seperti aktivitas bersepeda yang sering disebut FES cycling. Hal ini didasarkan pada pendapat bahwa FES cycling dianggap lebih aman dibandingkan terapi berjalan atau berdiri karena dilakukan dalam posisi duduk sehingga menghindari resiko terjatuh, tersandung, dll. Selain itu, terapi menggunakan gerakan mengayuh pedal juga memberikan variasi gerakan baru sehingga gerakan terapi tidak monoton. Terapi FES cycling juga mampu meningkatkan fungsi kardiovaskular dan pulmonari karena gerakannya yang dinamis sehingga melibatkan lebih banyak otot. Pada penelitian ini, dilakukan pengembangan terhadap penggunaan FES pada gerakan mengayuh pedal (cycling) untuk restorasi fungsi alat gerak bawah pada pasien pasca stroke.
2.2 Permasalahan
Pada penelitian ini akan dikembangkan untuk pemulihan fungsi alat gerak bawah pada latihan gerakan mengayuh pedal seperti orang bersepeda yang sering disebut FES cycling exercise. Berdasarkan latar belakang yang telah diuraikan, permasasalan penelitian dirumuskan sebagai berikut.
a. Bagaimana disain platrom mekanik cycling untuk FES cycling exercise systemBagaimana disain unit multichannel portable functional electrical stimulation.
8
b. Bagaimana disain fuzzy logic controller yang meliputi penentuan variable input dan output, basis pengetahuan, dan simulasi kontrol untuk pengujian awal.
c. Bagaimana disain performance evaluation system.
d. Bagaimana disain expermiental tests dari sistem yang diwujudkan yang melibatkan normal subjects dan with paralyzed subjects.
2.3 Tujuan Khusus
Penelitian ini ditujukan untuk menghasilkan prototype system rehabilitasi pasien pasca stroke berupa platform kursi roda berpedal (cycling) yang dapat dikayuh. Sebagai perangkat terapi platformini dilengkapi dengan unit FES sebagai penghasil artificial electrical stimulation dan controller unit berbasis fuzzy logic controller untuk mengendalikan parameter stimulator sesuai dengan capaian dari poses cycling. Sistem yang didisain akan menjadi prototype rehabilitasi FES cycling pasca stroke di ITS sehingga dapat digunakan untuk langkah lanjutan penelitian klinis.
Keterlibatan kecerdasan buatan dalam bentuk metoda kontrol yakni Fuzzy Logic Controller. Peneliti dengan latar belakang Biocycbernetic dan Rehabilitation Engineering, mengkaji variabel-varibale penting dari genarakan cycling dan hubungannya dengan intensitas stimluasi dari FES dan kinematika gerakan yang diumnpanbalikkan dalam system, menjadi satu set variable design. Unsur nonlinearity dari neuro-muculo-skeletal system pada manusia diwujudkan dalam ruzzy rule dari fuzzy controller. Fuzzy rule yang dikembangkan mengakomodasi unsur keamanan dalam gerakan cycling selama pasien diterapi, sehingga system yang dihasilkan dalam penelitian ini diharapkan dapat digunakan pasien secara mandiri.
Realisasi dari prototype system rehabilitasi FES cycling akan membawa dampak tersedianya peralatan yang dapat ditindaklanjuti dengan pengujian klinis pada tahapan berikutnya. Yang pada akhirnya akan membawa dampak keterpakaian keahlian bidang Rekayasa Rehabilitasi Medik dalam menyediakan peralatan kesehatan.
Dalam proses penelitian dihasilkan data dan pengetahuan ilimiah mengenai pengembangan platform mekanik FES cycling exercise system, pengembangan portable FES system, dan metoda fuzzy controller yang meliputi penentuan variabel dalam disain, iterasi disain, dan performance evaluation. FES cycling exercise ditujukan agar dapat digunakan di rumah dengan sedikit atau tanpa bantuan terapis sehingga meningkatkan kenyamanan bagi pasien pasca stroke.
2.4 Urgensi Penelitian
Penelitian ini dilatarbelakangi kebutuhan peralatan terapi yang melibatkan kecerdasan buatan dalam rangka mengatur parameter stimulasi FES pada pasien yang sedang diterapi kemampuan gerak bagian bawah. Peneliti dengan latar belakang yang sesuai, dengan pengetahuan dalam movement science dan rehablitation engineering menganalisa variabel penting dalam merealisasikan prototype FES cycling exercise. Pada prototype yang kami usulkan menggunakan unsur kecerdasan buatan dalam fuzzy logic controller yang mewujudkan unsur kecerdasan dalam menirukan manusia bernalar untuk menmpertimbangkan varibale yang diukur dari kinematika cycling dalam menentukan intensitas stimulasi FES. Sehingga nonlinearity dari neuro-musculo-skeletal system dapat dikaji dengan seksama dan output dari kontroller sesuai dengan yang diharapkan, sehingga dapat meminimalkan muscle fatigue dan efek terapi menjadi optimal.
Penelitian yang diusulkan ini merupakan bagian dari Penelitian Unggulan ITS Terapan Multidisplin. Dalam menyelesaikan permasalahan disain platfrom keterlibatan dari bidang disain produk sangat penting. Sehingga persoalan disain platfrom mekanik cycling dipecahkan oleh tim peneliti secara multidisplin. Penelitian yang kami usulkan memiliku urgensi yang kuat untuk dapat dijalankan pada tahun ini dan 2 tahun kedepan hingga dapat merealisasikan perlatan rehabilitasi FES yang dapat digunakan oleh pasien secara mandiri dan aman dengan fuzzy logic controller.
Kontribusi dari penelitian ini meliputi kontribusi ilmiah dan kontribusi praktis. Kontribusi ilmiah yang diharapkan dalam penelitian ini adalah dapat memperkaya khasanah pengetahuan dalam bentuk
9
publikasi karya ilmiah mengenai metode rehabilitasi bagi orang yang mengalami disabilitas khususnya pada alat gerak bawah dengan memanfaatkan FES. Kontribusi praktis yang diharapkan dalam penelitian ini meliputi sektor pemerintah, sektor swasta, dan sektor publik (masyarakat). Kontribusi praktis bagi pemerintah adalah mendukung program pemerintah untuk meningkatkan kualitas hidup masyarakat, khususnya pada bidang kesehatan. Kontribusi praktis bagi pihak swasta adalah memberikan peluang pengembangan teknologi rehabilitasi, khususnya yang berkaitan dengan rehabilitasi pada alat gerak bawah. Kontribusi praktis bagi masyarakat adalah membantu meningkatkan kualitas hidup orang yang mengalami disabilitas.
10
BAB III TINJAUAN PUSTAKA
3.1 Penyakit Stroke
Menurut World Health Organization (WHO), stroke adalah gangguan fungsi saraf akut yang disebabkan oleh terganggunya peredaran darah di otak secara mendadak [5]. Stroke menempati urutan ketiga sebagai salah satu penyebab kematian setelah penyakit jantung dan kanker serta menjadi penyebab utama kecacatan yang dialami manusia [6]. Jumlah penderita stroke di Indonesia tahun 2013 berdasarkan diagnosis tenaga kesehatan diperkirakan sebanyak 1.236.825 orang (7.0%) dan menjadi 10.9% pada tahun 2018 [7]. Menurut patofisiologinya, stroke dapat dikategorikan kedalam dua kategori yaitu stroke iskemik dan stroke hemoragis. Stroke iskemik dan hemoragis seringkali diawali oleh adanya luka pada pembuluh darah arteri. Disebut stroke iskemik karena adanya sumbatan pembuluh darah oleh thromboembolic yang mengakibatkan daerah dibawah sumbatan tersebut mengalami iskemik. Hal ini sangat berbeda dengan stroke hemoragis yang terjadi akibat adanya mycroaneurisme yang pecah.
Dari seluruh penderita stroke di Indonesia, stroke iskemik merupakan jenis yang paling banyak diderita yaitu sebesar 52,9%, diikuti secara berurutan oleh pendarahan intraserebral, emboli dan pendarahan subaraknoid dengan angka kejadian masing-masingnya sebesar 38,5%, 7,2%, dan 1,4% [2]. Ada beberapa faktor yang mampu menyebabkan seorang individu menjadi lebih rentan terhadap stroke. Faktor ini dapat dikategorikan menjadi dua yaitu faktor yang tidak dapat dimodifikasi dan faktor yang dapat dimodifikasi. Faktor yang tidak dapat dimodifikasi meliputi usia, jenis kelamin, dan riwayat keluarga. Sedangkan faktor yang dapat dimodifikasi meliputi hipertensi, diabetes, merokok, obesitas, infeksi, dll.
3.2 Functional Electrical Stimulation (FES)
FES merupakan teknik terapi yang mampu menghasilkan kontraksi pada otot dengan cara memberikan stimulus berupa arus listrik lemah dalam bentuk pulsa [4]. Karakteristik dari sinyal FES adalah sebagai berikut [8]:
1. Berbentuk impuls, dengan lebar pulsa sebesar 200 us. 2. Frekuensi sinyal sebesar 20 Hz.
3. Besar arus yang diijinkan maksimum 60 mA. 4. Amplitudo tegangan DC sebesar 0 – 100 V. 5. Mode monophasic signal (sinyal 1 polaritas).
Gambar 3. 2 Skematik Rangkaian Boost Converter [9]
Karakteristik tersebut dapat diubah tergantung impedansi dari kulit pasien (berkisar antara 1 KΩ – 10 KΩ). Selain itu, duty cycle dari sinyal pulsa yang dihasilkan FES juga perlu diperhatikan. Apabila frekuensi yang diset tinggi dan duty cycle yang dipakai juga tinggi, maka akan mempercepat kelelahan pada otot. Namun jika duty cycle diset terlalu rendah, akan mengakibatkan pergerakan otot yang tidak optimal. Gambar 2.1 merupakan skematik rangkaian FES sederhana yang terdiri dari rangkaian boost converter, PWM, dan pembangkit pulsa [9]. Ketika saklar dalam keadaan closed, maka diode akan bekerja secara reversed sehingga arus listrik mengalir ke induktor. Ketika saklar dalam keadaan open, diode akan aktif sehingga arus dari induktor mengalir ke load. Keluaran yang dihasilkan akan memiliki
11
tegangan yang lebih besar dibandingkan masukannya karena adanya induktor yang menambah arus masukan. Tegangan dari keluaran akan dijaga oleh kapasitor dengan nilai kapasitansi tinggi yang dipasang parallel dengan load agar ripple tegangan tetap rendah.
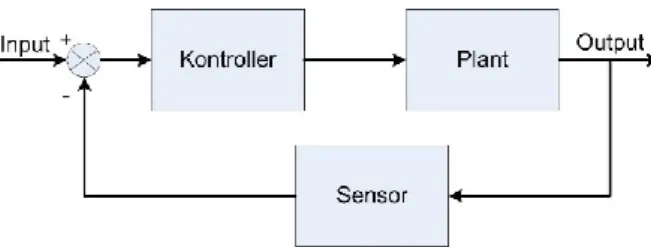
Gambar 3.2 Blok Diagram Sistem Loop Tertutup
Sistem loop tertutup (closed-loop) adalah suatu sistem pengaturan dimana output yang dihasilkan memililki pengaruh terhadap pengaturan pada sistem. Oleh karena itu, sistem loop tertutup juga dapat disebut sistem umpan balik. Diagram blok dari sistem loop tertutup dapat dilihat pada Gambar 2.3. Selisih dari output yang diinginkan (desired output) dengan output yang dihasilkan sistem akan dimasukkan kembali pada sistem sebagai umpan balik untuk selanjutnya menuju kontroler. Umpan balik berfungsi agar output yang dihasilkan semakin mendekati output yang diinginkan. Kelemahan sistem open-loop FES dapat diatasi menggunakan sistem closed-loop. Stimulus FES Cycling
3.3 FES Cycling
Gerakan mengayuh dapat dimodelkan menjadi sistem mekanik lima-sudut seperti pada Gambar 3.4 [10]. Seluruh sudut pada sistem diasumsikan sebagai sendi dengan satu Degree of Freedom (DoF). Dua sudut yang merepresentasikan sendi pinggul dan pusat rotasi dari kayuhan diasumsikan tetap. Sudut nol derajat dari sudut kayuh (crank angle) didefinisikan sebagai sudut dimana pedal parallel dengan permukaan tanah dan pedal kiri berada didekat panggul. Pada gerakan mengayuh, terdapat dua posisi pedal dimana momen total yang mengacu pada putaran kayuh bernilai nol. Dua posisi tersebut disebut dengan “dead spot” dan terjadi saat sudut kayuh bernilai 00 dan 1800 yang diberi simbol A dan A’. Dead
spot pada gerakan mengayuh didefinisikan sebagai titik transisi dari momen ekstensi ke momen fleksi. Sudut lutut dituliskan kedalam Persamaan 3.1
cos 𝛼 = 𝑙𝑎 2+ 𝑙 𝑏 2− 𝑙 𝑐 2− 𝑙 𝑑2 2 𝑙𝑎 𝑙𝑏 + 𝑙𝑐+𝑙𝑑 𝑙𝑎 𝑙𝑏 cos 𝜃 (3.1)
dimana 𝑙𝑎, 𝑙𝑏, 𝑙𝑐, 𝑑𝑎𝑛 𝑙𝑑 adalah panjang dari paha kiri, betis kiri, paha kanan, dan betis kanan.
Saat nilai 𝜃 bernilai 00 atau 1800, maka akan didapat nilai maksimum dan minimum untuk 𝛼. Untuk
mengatasi dead spot, maka otot yang akan distimulus (otot quadriceps dan hamstring) harus diberikan stimulus disekitar dead spot. Gaya yang diperlukan untuk mengayuh juga harus memiliki energi kinetik yang melebihi potensial gravitasi dari alat gerak yang lumpuh dan bagian berputar pada pedal (gear) untuk menghindari gerakan mengayuh yang terbalik (backward pedaling).
12
Gambar 3. 3 Sistem Mekanik Lima-sudut [10]
Terdapat aspek lain yang juga memengaruhi desain dari pola stimulasi. Pertama, regangan pasif dari hip extensor yang menghasilkan resistansi terhadap gerakan mengayuh. Resistansi akan semakin besar ketika panggul mendekati sudut fleksi yang besar seperti pada Gambar 3.4 (a) sehingga batas bawah dari stimulasi harus diperlebar hingga 00 (stimulus dimulai pada 𝜃
𝑏) seperti Gambar 3.4 (b). Kedua, delay dari respon otot (latency) antara stimulasi dan gaya yang dibangkitkan juga harus dipertimbangkan. Delay rata-rata sekitar 0.1 sekon dibutuhkan untuk menghasilkan torsi puncak setelah stimulasi diaktifkan. Sebagai pertimbangan respon delay dari alat gerak yang mengalami kelumpuhan, permulaan stimulasi harus dipindah menjadi 𝜃𝑐 seperti pada Gambar 3.4(c). Transformasi waktu delay terhadap sudut kayuh pada kecepatan minimum memerlukan gerakan mengayuh kontinu yang konstan sehingga stimulasi akhir yang dihasilkan seperti Gambar 4.3 (d). Setelah batasan dari stimulasi didefinisikan, pola stimulasi seperti ramp dipakai untuk menghindari gerakan mengayuh yang tersendat akibat stimulasi on-off pada otot secara mendadak.
Gambar 3. 4 Ilustrasi Sudut saat Gerakan [10]
(a) Sudut Awal sebelum Aspek Regangan Pasif Hip Extensor, (b) Sudut Perubahan Akibat Adanya Pertimbangan Regangan Pasif Hip Extensor, (c) Sudut Perubahan Akibat Aspek Latency Respon
Otot, (d) Stimulasi Akhir yang DihasilkanFuzzy Logic 3.4 Fuzzy Logic Control
13
Logika fuzzy diperkenalkan pertama kali pada tahun 1965 oleh Prof. Lutfi A. Zadeh yang beranggapan bahwa logika nol-satu seperti logika tegas, suatu elemen mempunyai dua pilihan yaitu terdapat dalam himpunan (bernilai satu) dan tidak terdapat pada himpunan (bernilai nol), tidak dapat mewakili setiap pemikiran manusia. Logika fuzzy dikembangkan untuk mempresentasikan setiap keadaan dimana terdapat nilai diantara nol dan satu (keanggotaan elemen berada di interval [0,1]) sehingga dapat dilihat bahwa perbedaan antara logika tegas dan logika fuzzy terletak pada keanggotaan elemen dalam suatu himpunan.
Logika fuzzy menjadi alternatif dari berbagai sistem untuk pengambilan keputusan karena memiliki beberapa kelebihan seperti
1. Memiliki konsep yang sederhana sehingga mudah untuk dimengerti. 2. Mampu beradaptasi terhadap perubahan dan ketidakpastian.
3. Memiliki toleransi terhadap data yang tidak tepat. 4. Mampu mensistemkan fungsi non-linier yang kompleks.
5. Merupakan bentuk pengaplikasian pengalaman/pengetahuan dari pakar (knowledge based). 6. Mampu bekerjasama dengan teknik kontrol secara konvensional.
7. Didasarkan pada bahasa sehari-hari sehingga mudah dimengerti.
Gambar 3.5 Tahapan dalam Sistem Fuzzy [11]
Berdasarkan kelebihan yang telah disebutkan, logika fuzzy dinilai cocok digunakan sebagai sistem kontrol pada FES karena otot yang distimulasi oleh sistem FES memiliki karakteristik non-linier. Selain itu, otot yang distimulasi sistem FES juga memiliki karakteristik time varying seperti variasi dari kondisi fisik otot, perubahan kekuatan otot, dan kelenturan otot. Sistem FES juga bersifat subject-dependent dimana tiap-tiap orang membutuhkan besaran stimulus yang berbeda menghasilkan gerakan dan memiliki resistansi kelelahan otot yang berbeda dan cenderung rendah. Oleh karena itu, dibutuhkan sistem kontrol yang fleksibel dalam hal pengaturannya.
Tahapan dalam sistem fuzzy dapat diilustrasikan seperti pada Gambar 3.5 yang terdiri dari empat tahapan yaitu fuzzifikasi, aturan fuzzy, inferensi, dan defuzzifikasi [11].
1. Fuzzifikasi
Fuzzifikasi didefinisikan sebagai pemetaan dari himpunan tegas (crispset) ke himpunan fuzzy (fuzzy set). Kriteria yang harus dipenuhi pada proses fuzzifikasi adalah semua anggota pada himpunan tegas harus termuat dalam himpunan fuzzy.
2. Aturan fuzzy
Aturan fuzzy (fuzzy rules) yang digunakan pada himpunan fuzzy adalah aturan if then yang dibedakan menjadi dua yaitu proposisi fuzzy atomic dan proposisi fuzzy compound. Proposisi fuzzy atomic adalah pernyataan single dimana x sebagai variabel linguistik dan A adalah himpunan fuzzy dari x. Proposisi fuzzy compound adalah gabungan dari proposisi fuzzyatomic yang dihubungkan dengan operator “OR”, “AND”, dan “NOT”. Contoh “𝑥 𝑖𝑠 𝑃” adalah contoh dari proposisi fuzzy atomic sedangkan “𝑥 𝑖𝑠 𝑄 𝐴𝑁𝐷 𝑥 𝑖𝑠 𝑅” adalah contoh dari proposisi fuzzy compound.
3. Inferensi fuzzy
Inferensi fuzzy merupakan tahap evaluasi pada aturan fuzzy. Terdapat dua macam inferensi fuzzy yang sering digunakan dalam penelitian yaitu metode Mamdani dan Sugeno. Metode Mamdani menggunakan fungsi implikasi minimum dan agregasi maksimum sedangkan metode Sugeno menggunakan agregasi berupa singleton-singleton.
14 4. Deffuzifikasi
Defuzzifikasi merupakan pemetaan dari himpunan fuzzy ke himpunan tegas. Himpunan fuzzy yang dimaksud adalah hasil output yang diperoleh dari hasil inferensi. Ada beberapa metode yang dipakai untuk proses defuzzifikasi seperti metode centroid yang mengambil nilai titik pusat dari daerah fungsi keanggotaan (center of gravity), bisector, Mean of Maximum (MoM), Largest of Maximum (LoM), dan Smallest of Maximum (SoM).
3.5 Road Map Penelitian
Penelitian yang diusulkan berupa metode rehabilitasi lower limb pada pasien pasca stroke dengan memanfaatkan FES dalam latihan gerakan mengayuh pedal. Penelitian ini didasarkan atas tinjauan peneliti sebelumnya yang berpendapat bahwa rehabilitasi lower limb yang dikombinasikan dengan stimulasi listrik meningkatkan efektifitas terapi yang dijalankan pasien. Salah satu gerakan terapi yang aman bagi penderita stroke yang kehilangan fungsi dari alat gerak bawahnya adalah gerakan mengayuh karena dilakukan dalam keadaan duduk sehingga tidak memerlukan pengaturan keseimbangan yang kompleks. Pemodelan stimulus untuk gerakan mengayuh didasarkan pada penelitian oleh Chen Jia Jin dan Matthew J. Bellmann. Sedangkan desain yang dikembangkan dalam penelitian kali ini menggunakan pedal exerciser yang dikombinasikan denga kursi roda sebagai tempat duduk pasien untuk mengurangi biaya dan memudahkan pemakaian oleh pengguna karena tidak perlu berpindah dari kursi rodanya.
Desain FES didasarkan pada penelitian Achmad Fanany dan perancangan akuisisi data posisi kaki didasarkan pada penelitian Takashi Watanabe dengan mengubah sensor yang digunakan menjadi rotary encoder untuk mendapatkan posisi sudut kayuh yang akan digunakan sebagai masukan sistem kontrol sehingga otot mampu melakukan gerakan mengayuh pedal dengan optimal. Pada penelitian ini, pengaturan FES dilakukan pada besarnya nilai stimulus yang diberikan. Besarnya nilai stimulus bergantung pada error yang dihasilkan sistem kontrol. Semakin besar error maka nilai dari stimulus semakin besar, begitu juga sebaliknya.
Adapun sistem kontrol yang diusulkan menggunakan sistem kontrol berbasis logika fuzzy yang akan mengatur besarnya stimulus listrik yang diberikan pada pasien berdasarkan penelitian Chen Jia Jin dan Rahman Davoodi. Pada penelitian kali ini, penggunaan logika fuzzy menggunakan input posisi sudut kayuh (crank angle) yang diakuisisi melalui sensor rotary encoder dengan set of rules yang sama yaitu seven-to-seven rule table. Logika fuzzy dipilih sebagai sistem kontrol pada FES karena otot yang distimulasi oleh sistem FES memiliki karakteristik non-linier. Selain itu, otot yang distimulasi sistem FES juga memiliki karakteristik time varying seperti variasi dari kondisi fisik otot, perubahan kekuatan otot, dan kelenturan otot. Sistem FES juga bersifat subject-dependent dimana tiap-tiap orang membutuhkan besaran stimulus yang berbeda menghasilkan gerakan dan memiliki resistansi kelelahan otot yang berbeda dan cenderung rendah. Oleh karena itu, dibutuhkan sistem kontrol yang fleksibel dalam hal pengaturannya.
Penambahan rangkaian monitoring selama latihan diberikan untuk melengkapi informasi kondisi tubuh subjek pra dan pasca latihan gerakan mengayuh pedal. Monitoring yang ditambahkan berupa monitoring saturasi oksigen dalam tubuh menggunakan rangkaian pulse oximeter dengan tampilan antar muka agar subjek atau terapis mampu melakukan pemantauan. Berdasarkan penelitian yang dilakukan sebelumnya, maka penelitian yang diusulkan pada proposal ini adalah rehabilitasi alat gerak bawah (lower limb) pada pasien pasca stroke dengan memanfaatkan FES pada latihan gerakan mengayuh pedal. Adapun fishbone dari usulan yang diajukan disajikan pada Gambar 3.6.
15 Gambar 3. 6 Fishbone Diagram Penelitian
16
BAB IV METODE
4.1 Disain Sistem
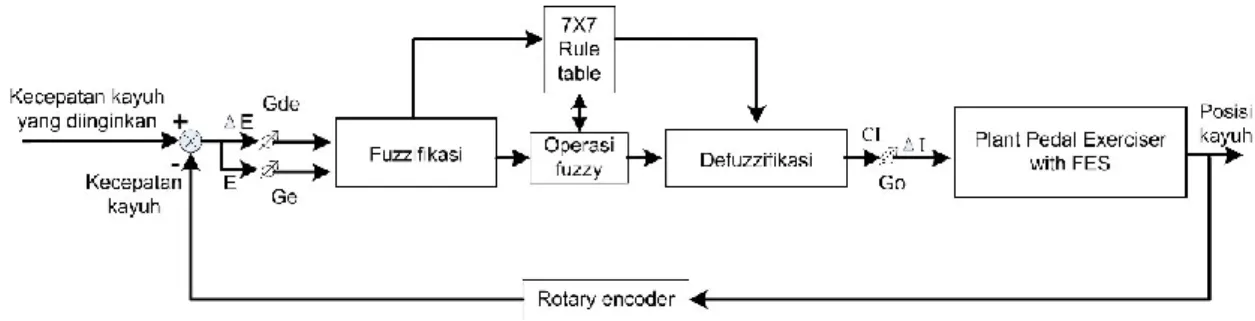
Diagram blok dari sistem diilustrasikan pada Gambar 4.1. Sistem pada penelitian ini dimulai dengan memberikan stimulus FES hingga kecepatan kayuh bernilai 25 rpm. Gerakan mengayuh akan menghasilkan nilai dari posisi pedal atau sudut kayuh (crank angle) yang didapatkan dari rotary encoder. Sudut kayuh yang dihasilkan dari gerakan mengayuh pedal akan diproses sehingga diperoleh kecepatan yang dihasilkan oleh subjek. Selisih kecepatan yang diinginkan (desired speed) dengan kecepatan yang dihasilkan akan menjadi umpan balik yang mengurangi nilai masukan. Masukan selanjutnya akan diproses oleh sistem kontrol menggunakan logika fuzzy. Logika fuzzy dipakai untuk memberikan kontrol terhadap besarnya stimulus FES yang akan diberikan pada otot alat gerak bawah. Sistem fuzzy akan memroses data masukan (crisp input) berupa kecepatan kayuh untuk kemudian diubah menjadi fuzzy input sesuai dengan fungsi membership yang telah ditentukan. Pada penelitian ini diajukan tujuh fuzzy set dengan fungsi membership berbentuk segitiga yang merepresentasikan nilai negative big (NB), negative medial (NM), negative small (NS), zero (ZE), positive small (PS), positive medial (PM), dan positive big (PB). Pada penelitian ini, aturan fuzzy (rules) yang dipakai menggunakan seven-by-seven rule table berdasarkan step respon sistem orde dua. Tahap selanjutnya adalah inferensi fuzzy untuk mengevaluasi rules yang telah dibuat melalui metode implikasi dan agregasi sehingga menghasilkan suatu nilai dalam fuzzy value. Nilai akan diubah kembali menjadi crisp value sebagai hasil keluarannya. Nilai inilah yang dipakai untuk menentukan besarnya stimulus FES yang akan diberikan.Semakin besar error yang dihasilkan sistem, maka stimulus yang diberikan oleh rangkaian FES akan semakin besar dengan nilai arus maksimum sebesar 20 mA. Sebaliknya, semakin kecil error
Gambar 4. 3 Diagram Blok Sistem
Gambar 4.2. Model Cycling Machine [12]
17
yang dihasilkan sistem, maka stimulus yang diberikan oleh rangkaian FES akan semakin kecil. Stimulus FES akan merangsang otot pada alat gerak bawah untuk bekerja sehingga menghasilkan gerakan mengayuh pedal. Model dari platform cycling machine yang akan direalisasikan pada penelitian ini diadopsi dari disain Huang et.al [12] pada Gambar 4.2. Pada tahap awal bersama dengan disain rangkaian FES dan fuzzy controller, disain geometris dari cycling machine akan dilakukan dan ditindak lanjuti dengan realisasi system. Pengalaman dalam merealisasikan electric wheelchair pada penelitian sebelumnya (PTUPT Dikti 2018-2020) sangat membantu dalam disain dan realisasi cycling machine. Sensor yang digunakan pada penelitian ini adalah rotary encoder. Rotary encoder dipakai untuk menentukan nilai sudut kayuh yang dihasilkan dari perputaran gear akibat gerakan mengayuh. Nilai dari sudut kayuh ini kemudian digunakan untuk menghitung kecepatan kayuh yang dihasilkan subjek saat melakukan latihannya. Oleh karena itu, sensor akan diletakkan disekitar gear sedemikian rupa sehingga ketika gear berputar, sensor juga ikut berputar dan menghasilkan nilai sudut. Nilai yang didapatkan selanjutnya diproses pada mikrokontroller untuk menghasilkan kecepatan kayuh.
Sementara itu, elektroda yang digunakan adalah transcutaneous electrode (elektroda yang ditempelkan pada permukaan kulit) berupa disposable electrode. Elektroda yang digunakan akan diletakkan pada empat jenis otot untuk masing-masing kaki yaitu Rectus femoris dan Vastus lateralis untuk bagian quadriceps serta Bicep femoris dan Semimembranosus untuk bagian harmstring.
4.2 Disain Multichannel Poratbel FES
Rangkaian FES merupakan gabungan dari tiga rangkaian berbeda yaitu rangkaian boost converter, rangkaian pembangkit pulsa, dan rangkaian driver channel. Ketiga rangkaian ini digabungkan sedemikian rupa sehingga menghasilkan suatu rangkain FES. Keluaran rangkaian boost converter akan menjadi masukan rangkaian pembangkit pulsa, masukan rangkaian boost converter berasal dari masukan tegangan DC 5V dan PWM dari mikrokontroller, serta masukan rangkaian driver channel berasal logika high-low yang dihasilkan mikrokontroller. Blok diagram dari rangkaian FES dapat dilihat pada Gambar 4.3.
Rangkaian boost converter digunakan untuk menaikkan tegangan input. Tegangan masukan pada boost converter sebesar 5V dengan frekuensi 20 kHz. Sesuai Gambar 3.3, rangkaian boost converter juga membutuhkan masukan Pulse Width Modulation (PWM) untuk menghasilkan keluaran berbentuk pulsa. Pengaturan PWM dapat menggunakan transistor tipe MOSFET karena memiliki switching frequency yang tinggi, tegangan drop forward yang rendah, dan tegangan breakdown yang tinggi. Pemilihan tipe transistor juga harus memenuhi kriteria dimana tegangan VCE transistor lebih besar dari tegangan
maksimal yang mampu dikeluarkan rangkaian boost converter serta arus yang mampu dilewatkan transistor lebih besar dari arus yang dihasilkan dari rangkaian boost converter. Pemilihan tipe diode
18
juga didasarkan pada kemampuan switching diode tersebut. Dibutuhkan diode dengan kecepatan switching yang tinggi agar mampu menaikkan tegangan input.
Rangkaian pembangkit pulsa digunakan untuk menghasilkan pulsa dengan lebar 200µS serta frekuensi 20 Hz. Rangkaian berupa half H-bridge dengan memanfaatkan transistor NPN dan PNP yang dihubungkan pada kaki kolektornya. Penghubungan dari kedua kaki kolektor ini akan menghasilkan nilai keluaran transistor yang selalu berkebalikan. Penambahan transistor NPN dan IC inverter pada kaki base transistor PNP dilakukan karena saat transistor pada half H-bridge aktif, nilai tegangan VBC
pada PNP akan sangat besar. Rangkaian driver channel digunakan untuk menggantikan penggunaan solid state relay. Selain itu, rangkaian ini juga digunakan sebagai pengatur channel aktif melalui IC inverter. Rangkaian driver channel mirip dengan rangkaian pembangkit pulsa, namun masukan untuk IC inverter berupa logika high-low.
4.3 Disain Fuzzy Logic Controller
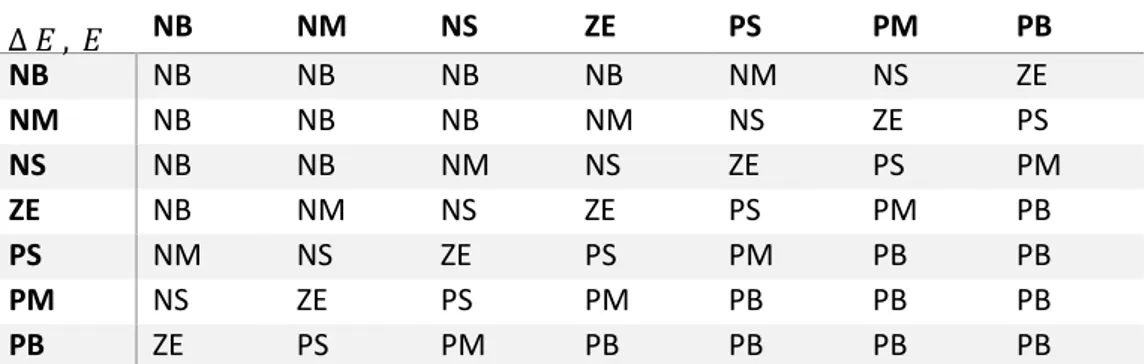
Langkah selanjutnya adalah perancangan kontroler menggunakan fuzzy logic. Sistem yang dipakai adalah sistem single-input-single-output (SISO) dengan masukan berupa gain dari intensitas stimulus dan keluaran berupa kecepatan kayuh. Sesuai diagram blok sistem pada Gambar 3.1, proses fuzzifikasi akan mengubah masukan proses error (E) dan perubahan error (∆𝐸) kedalam variabel linguistik. Nilai E dan ∆𝐸 didapat dari pengurangan kecepatan kayuh sebelumnya terhadap kecepatan kayuh sekarang. Fungsi membership yang dipakai berbentuk segitiga karena memiliki beberapa keuntungan seperti sifatnya yang linear sehingga penrhitungan lebih sederhana, perpotongan antar fuzzyset yang sesuai, dan menghasilkan steady-state error yang lebih kecil dibandingkan fungsi membership yang lain. Fungsi membership yang digunakan berbentuk segitiga sebanyak tujuh fungsi dengan keterangan negative big (NB), negative medial (NM), negative small (NS), zero (ZE), positive small (PS), positive medial (PM), dan positive big (PB) yang merepresentasikan besarnya stimulus yang diberikan. Kumpulan aturan (set of rules) yang digunakan untuk mengoperasikan fuzzy set dari E dan ∆𝐸 adalah seven-by-seven rule table berdasarkan step response dari sistem orde dua seperti pada Tabel 4.1 sedangkan proses defuzzifikasi menggunakan metode centroid.
Tabel 4. 1 Fuzzy Rule Set
NB NM NS ZE PS PM PB NB NB NB NB NB NM NS ZE NM NB NB NB NM NS ZE PS NS NB NB NM NS ZE PS PM ZE NB NM NS ZE PS PM PB PS NM NS ZE PS PM PB PB PM NS ZE PS PM PB PB PB PB ZE PS PM PB PB PB PB 4.4 Tahapan Penelitian
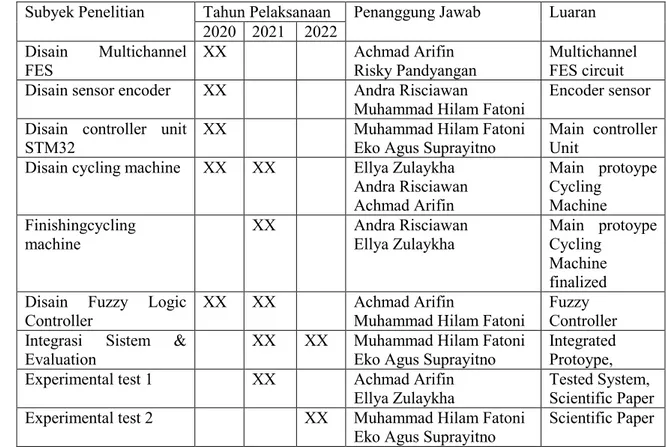
Tahapan penelitian untuk melaksanakan bagian per bagian dari sistem pada sub bab 4.1. sampai dengan sub bab 4.3 di atas yang akan direalisasikan dan proses integrasi dan pengujian performansi, serta eksperimen dengan melibatkan subyek normal dan subyek paralyzed kami jelaskan pada Tabel 4.2.
19
Subject penelitian berupa sub topik dalam melaksanakan penelitian yang kami usulkan terbagi dalam tiga tahun meliputi:
a. Disain Multichannel FES b. Disain sensor encoder
c. Disain main controller unit berbasis STM32 d. Disain plaftrom cycling machine
e. Finishingcycling machine f. Disain Fuzzy Logic Controller g. Integrasi Sistem & Evaluation
h. Experimentel test 1 (with normal subjects) i. Experimental test 2 (with paralyzed subjects)
Untuk subject a sampai dengan c, saat ini peneliti pada Laboratorium Biocybernetics Departemen Teknik Biomedik ITS dan mahasiswa tugas akhir sudah familiar dengan probelm design pada bisang ini. Sehingga untuk penelitian yang kami usulkan merupakan aplikasi dari pengetahuan pada para peneliti untuk FES cycling. Prototype rangkaian yang pernah direalisasikan dapat diadopsi untuk realisasi protype tahap pertama dari penelitian ini. Parameter disain kami sesuaikan untuk aplikasi lower limb.Pelaksanaan setiap tahap dan l;uaran dari tiap pelaksanaan subyek penelitain dijelaskan pada Tabel 4.2. Disain dan realisasi FES unit dan control system sangat ditunjang oleh pengalaman dalam pengembangan FES control system berbasis fuzzy logic [13]-[16].
Tabel 4.2 Tahapan pelaksanaan penelitian
Subyek Penelitian Tahun Pelaksanaan Penanggung Jawab Luaran 2020 2021 2022 Disain Multichannel FES XX Achmad Arifin Risky Pandyangan Multichannel FES circuit Disain sensor encoder XX Andra Risciawan
Muhammad Hilam Fatoni
Encoder sensor Disain controller unit
STM32 XX Muhammad Hilam Fatoni Eko Agus Suprayitno Main controller Unit Disain cycling machine XX XX Ellya Zulaykha
Andra Risciawan Achmad Arifin Main protoype Cycling Machine Finishingcycling machine XX Andra Risciawan Ellya Zulaykha Main protoype Cycling Machine finalized Disain Fuzzy Logic
Controller XX XX Achmad Arifin Muhammad Hilam Fatoni Fuzzy Controller Integrasi Sistem &
Evaluation
XX XX Muhammad Hilam Fatoni Eko Agus Suprayitno
Integrated Protoype,
Experimental test 1 XX Achmad Arifin
Ellya Zulaykha
Tested System, Scientific Paper
Experimental test 2 XX Muhammad Hilam Fatoni
Eko Agus Suprayitno
20 Luaran yang potensial dari penelitian ini meliputi:
1. Protoype system FES cycle exercise for post stroke patient 2. Patent dari rancangan protoype system (point 1)
3. HAKI dari software fuzzy logic controller
4. Publikasi ilmiah data pengujian fuzzy logic controller
5. Publikasi ilmiah pengaruh cycling exercise dengan FES terhadap (a) Menurunnya spasticity
(b) Meningkatkanya joint stability
(c) Meningkatnya Range of Motion (ROM) dari persendian knee, hip, knee joint angle
(d) Meningkatnya saturated oxygen yang berkorelasi dengan meningktnya performansi cardiovasular dan pulmonary system
(e) Meningkatkan voluntary movement pada pasien setelah melalui terapi terporgram dan berjangka.
21
BAB V JADWAL DAN RANCANGAN ANGGARAN BIAYA
5.1.Jadwal Penelitian Tabel 5.1 Jadwal Penelitian
Tahun I Kegiatan Pelaksanaan Bulan ke
3 4 5 6 7 8 9 10 11
Disain Multichannel FES
Disain sensor encoder XX Disain controller unit STM32
XX Disain cycling machine XX XX Laporan Kemajuan
Disain Fuzzy Logic
Controller XX XX
Laporan Akhir
Penelitain
Tahun II Kegiatan Pelaksanaan Bulan ke
3 4 5 6 7 8 9 10 11
Evaluasi hasil tahun I Finishingcycling machine
Refining disain Fuzzy Logic Controller
Laporan kemajuan Integrasi Sistem I Review Etik Penelitian Experimental test 1 Laporan akhir
Tahun III
Kegiatan Pelaksanaan Bulan ke
3 4 5 6 7 8 9 10 11
Evaluasi hasil tahun II Review Etik Penelitian Integrasi Sistem & Performance Evaluation Persiapan Pasien Laporan Kemajuan Experimental test 2 Publikasi & Laporan
22 5.2.Anggaran Biaya
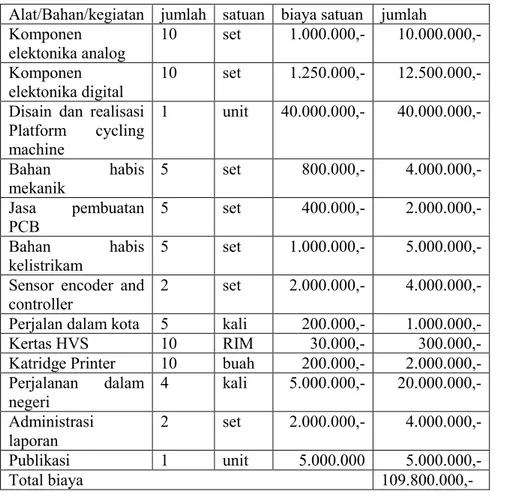
Tabel 5.2 Rencana Anggaran Biaya
Tahun I (dalam Rupiah)
Alat/Bahan/kegiatan jumlah satuan biaya satuan jumlah Komponen elektonika analog 10 set 1.000.000,- 10.000.000,- Komponen elektonika digital 10 set 1.250.000,- 12.500.000,- Disain dan realisasi
Platform cycling machine 1 unit 40.000.000,- 40.000.000,- Bahan habis mekanik 5 set 800.000,- 4.000.000,- Jasa pembuatan PCB 5 set 400.000,- 2.000.000,- Bahan habis kelistrikam 5 set 1.000.000,- 5.000.000,- Sensor encoder and
controller
2 set 2.000.000,- 4.000.000,- Perjalan dalam kota 5 kali 200.000,- 1.000.000,- Kertas HVS 10 RIM 30.000,- 300.000,- Katridge Printer 10 buah 200.000,- 2.000.000,- Perjalanan dalam negeri 4 kali 5.000.000,- 20.000.000,- Administrasi laporan 2 set 2.000.000,- 4.000.000,- Publikasi 1 unit 5.000.000 5.000.000,- Total biaya 109.800.000,-
Tahun II (dalam Rupiah) Alat/Bahan/kegiatan jumlah satuan biaya satuan jumlah
Disain dan realisasi Platform cycling machine tahap 2 1 unit 40.000.000,- 40.000.000,- Refening control system 2 set 10.000.000,- 20.000.000,- Bahan habis mekanik 3 set 800.000,- 2.400.000,- Jasa pembuatan PCB 5 set 400.000,- 2.000.000,- Bahan habis kelistrikam 4 set 1.000.000,- 4.000.000,- Biaya eksperimen 5 set 2.000.000,- 10.000.000,- Perjalanan dalam negeri 4 kali 5.000.000,- 20.000.000,- Administrasi laporan 2 set 2.000.000,- 4.000.000,- Publikasi 1 unit 5.000.000 5.000.000,- Total biaya 107.400,00,-
23
Tahun III (dalam Rupiah) Biaya eksperimen 10 set 3.000.000,- 30.000.000,-
Perjalanan luar negeri 1 kali 35.000.000,- 35.000.000,- Administrasi laporan 2 set 2.500.000,- 5.000.000,- Publikasi 2 unit 10.000.000 20.000.000,- Total biaya 90.000.000,-
24
BAB VI DAFTAR PUSTAKA
[1] AHA (American Heart Association). Cardiovascular Disease : A Costly Burden For America Projections Through 2035. The American Heart Association Office of Federal Advocacy : Washington DC; 2017.
[2] Stroke in Perspective: Types of Stroke. Washington University 1999. Cited on 23rd October 2019.
Available from: http://www.strokecenter.org/education/ais_stroke_types/stroke_types.html [3] M. G. Pandy, “Computer Modeling and Simulation of Human Movement,” Ann. Rev. Biomed.
Eng., vol.3, pp.245-273, 2001.
[4] Andrews B, Shippen J, Armengol M, et al. A Design Method for FES Bone Health Therapy in SCI. Eur J Transl Myol 2016. 26(4): 6419.
[5] Pengertian Stroke Menurut WHO. Cited on 23rd October 2019. Available from :
http://www.who.int/topics/cerebrovascular_accident/en/index.html
[6] Caplan LR. Caplan’s stroke: A clinical approach 4th edition. Philadelphia: Saunders, 2009. [7] Hasil Riskesdas 2018. Cited on 23rd November 2019. Available from:
http://www.depkes.go.id/resources/download/info-terkini/hasil-riskesdas-2018.html
[8] Fanany, Achmad. Robotic Glove Using Hybrid Functional Electrical Stimulation (FES) and Exoskeleton for Human Hand Rehabilitation. Surabaya, 2018.
[9] Kartika, Dinda. Sistem Closed Loop Functional Electrical Stimulus (FES) pada Aktivitas Menggenggam Menggunakan Informasi Sensori Posisi Jarak dan Gaya Haptic. Surabaya, 2017. [10] Jia-Jin J, Chen. Applying Fuzzy Logic to Control Cycling Movement Induced by Functional
Electrical Stimulation. IEEE Transactions on Rehabilitation Engineering, Vol. 5, No. 2, June 1997 [11] Wang, Li Xin. A Course in Fuzzy Systems and Control. New Jersey: Prentice-Hall International,
1997.
[12] Gao Huang, Weimin Zhang, Zhangguo Yu1, Xuechao Chen, Fei Meng, Marco
Ceccarelli, and Qiang HuangDesign and simulation of leg exoskeleton cycling-actuated
wheelchair, International Journal of Advanced Robotic Systems November-December 2017: 1–11 [13] Design of Fuzzy Controller of the Cycle-to-Cycle Control for Swing Phase of Hemiplegic Gait Induced by FES, IEICE TRANSACTIONS on Information and Systems,[14]Design and tests of a wearable functional electrical stimulation (FES) system for knee joint movement using cycle-to-cycle control method, Journal of Theoretical and Applied Information Technology, 2017.
[15] Computer Simulation Test of Fuzzy Controller for the Cycle-to-Cycle Control of Knee Joint Movements of Swing Phase of FES Gait, IEICE TRANSACTIONS on Information and Systems, 2005, Volume: E88-D, ISSN: 0916-8532
[16] A Test of Stimulation Schedules for the Cycle-to-Cycle Control of Multi-joint Movements in Swing Phase of FES-induced Hemiplegic Gait, BIOMECHANIZM, 2006.
25
BAB VII LAMPIRAN
Biodata Tim Peneliti 1. Ketua
a. Nama Lengkap : Dr. Achmad Arifin, S.T., M.Eng. b. NIP/NIDN : 197103141997021001/ 0014037105
c. Fungsional/Pangkat/Gol. : Lektor Kepala/Pembina Tk. I/IVB
d. Bidang Keahlian : Biomedical Engineering/Rehabilitation Engineering
e. Departemen/Fakultas : Teknik Biomedik/Teknologi Elektro dan Informatika Cerdas f. Alamat Rumah dan No. Telp. : Puri Citra Rungkut E-7 Surabaya. Telp. 082257525915 g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang
diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota) Peneletian:
1. Human Computer Interface Untuk Sistem Kendali Kursi Roda Untuk Subyek Lumpuh, Penelitian Terapan Unggulan Perguruan Tinggi (PTUPT), Ketua, RistekDikti, 2020. 2. Human Computer Interface Untuk Sistem Kendali Kursi Roda Untuk Subyek Lumpuh,
Penelitian Terapan Unggulan Perguruan Tinggi (PTUPT), Ketua, RistekDikti, 2019. 3. Human Computer Interface Untuk Sistem Kendali Kursi Roda Untuk Subyek Lumpuh,
Penelitian Terapan Unggulan Perguruan Tinggi (PTUPT), Ketua, RistekDikti, 2018. 4. Pengembangan Teknologi Rehabilitasi Kemampuan Gerak Subyek Pasca Stroke dengan
Integrated Functional Electrical Stimulation (FES)System, IPTEKS, DIKTI, 2016 5. Pengembangan Teknologi Rehabilitasi Kemampuan Gerak Subyek Pasca Stroke dengan
Integrated Functional Electrical Stimulation (FES)System, IPTEKS, DIKTI, 2015 Pengabdian Pada Masyarakat:
1. Workshop on using Braille Embosser and Text Editor Software For the Blind and Visual Impairment Student Gelombang II 22 – 24 Agustus 2019, Anggota, Motorolla, 2019. 2. Workshop on using Braille Embosser and Text Editor Software For the Blind and Visual
Impairment Student 6-10 Mei 2019, Anggota, Motrolla, 2019.
3. Diseminasi Hasil Riset Departemen Teknik Biomedik FTE-ITS kepada Fakultas Kedokteran Universitas Airlangga, Dana Departemen, Ketua, ITS 2018.
4. Pengabdi dalam kegiatan "Elektro peduli desa ELEKTRODA Desa Karang Jati Pasuruan Jawa Timur", Departemen Teknik Elektro FTE, Anggota, 2017
h. Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
1. Design of Fuzzy Controller of the Cycle-to-Cycle Control for Swing Phase of Hemiplegic Gait Induced by FES, IEICE TRANSACTIONS on Information and Systems, 2006 | Volume: E89-D | ISSN: 0916-8532
2. Design and tests of a wearable functional electrical stimulation (FES) system for knee joint movement using cycle-to-cycle control method, Journal of Theoretical and Applied
Information Technology, Tahun: 2017, Volume: 95, ISSN: 19928645.
3. Computer Simulation Test of Fuzzy Controller for the Cycle-to-Cycle Control of Knee Joint Movements of Swing Phase of FES Gait, IEICE TRANSACTIONS on Information and Systems, 2005, Volume: E88-D, ISSN: 0916-8532
4. A Test of Stimulation Schedules for the Cycle-to-Cycle Control of Multi-joint Movements in Swing Phase of FES-induced Hemiplegic Gait, BIOMECHANIZM, 2006 , Volume: 30, ISSN: 0285-0885
5. Desain Sistem Pengukuran Lower Limb Joint Angles pada Kondisi Dinamik untuk FES, Jurnal Nasional Teknik Elektro dan Teknologi Informasi (JNTETI), Tahun: 2018, Volume: 7, ISSN: 2301 – 4156.
26
6. Sensitivitas, Spesifisitas dan Akurasi Pengukuran Kontraksi Uterus Kala I Fase Aktif Ibu Bersalin Menggunakan TokodinamometerJurnal: MAJALAH KEDOKTERAN BANDUNG Tahun: 2018, Volume: 50, ISSN: 2338-6223.
7. Programmable amplitude of portable electrical stimulator for multi-channel functional electrical stimulator (FES) system, Journal of Theoretical and Applied Information Technology
Tahun: 2017, Volume: 95, ISSN: 19928645.
8. Signal processing and extensive characterization method of heart sounds based on wavelet analysis, International Review of Electrical Engineering, Tahun: 2016 | Volume: 11 | ISSN: 18276660
9. The Effect of Virtual Reality on Pain in Primiparity Women, International Journal of Nursing and Health Science, 2017, Volume: 4, ISSN: 2381-4888
i. Paten (2) terakhir
j. Tugas Akhir (2 terakhir yang paling relevan), Tesis (2 terakhir yang paling relevan), dan Disertasi (2 terakhir yang paling relevan) yang sudah selesai dibimbing.
Disertasi:
1. PENGEMBANGAN PERALATAN PROGRAMMABLE FES SYSTEM DENGAN WEARABLE SENSOR, RACHMAD SETIAWAN 07111060010004
Tugas Akhir:
1. Desain Fuzzy Controller pada Swing Phase untuk Mengontrol Stimulasi pada Foot Drop Correction, Muhammad Adib Syamlan 7311540000011
2. FES cycling exercise berbasis fuzzy locgic control untuk pasien pasca stroke, Rizky Mayardiyah Syafitri Pandiangan 07311640000014.
3. Desain Perintah Myoelectric Control Sebagai Perintah Kursi Roda Elektrik Untuk Mobilitas Penyandang Disabilitas, I Wayan Nudra Bajantika Pradivta 07311540000009 4. DESAIN SISTEM KONTROL KURSI RODA DENGAN SINYAL BIOIMPEDANSI
MENGGUNAKAN FUZZY LOGIC CONTROL PADA LINGKUNGAN YANG BERBEDA, TRISA SAFIRA HASANAH, 7311540000003
27 2. Anggota 1
a.
Nama Lengkap
: Muhammad Hilman Fatoni, S.T., M.T.
b.
NIP/NIDN
: 19910325 201504 1001 / 0025039101
c.
Fungsional/Pangkat/Gol.
: Asisten Ahli / Penata Muda Tingkat I / IIIb
d.
Bidang Keahlian
: Biomedical Electronic
e.
Departemen/Fakultas
: Teknik Biomedik / FTEIC
f.
Alamat Rumah dan No. Telp.
: Jl. Tambak Gringsing II/14 Surabaya 60163 /
085236425858
g.
Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang
diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
No
Judul
Tahun
Skema
1
Aplikasi Spatial Filter dalam Sistem Brain
Computer
Interface
Menggunakan
Informasi Motorik Bagian Lower Limb
2016
Penelitian Pemula -
Dana PNBP ITS
2016
2
Aplikasi Brain Computer Interface Berbasis
Aktifitas Sensorymotor Rhythms sebagai
Antar Muka Pengendali Kursi Roda Listrik
2017
Penelitian Pemula –
Dana Lokal ITS 2017
3
Pengembangan Sistem Training Subyek
untuk Meningkatkan Success Rate dalam
Kontrol Kursi Roda Listrik berbasis Brain
Computer Interface
2018
Penelitian Pemula –
Dana Lokal ITS 2018
h.
Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
No
Judul
Tahun
Jenis
1
Extraction of Brain Signal during Motor
Imagery Task for Wheelchair Control
Command
2017 Int'l Conference on Research
& Innovation in Computer,
Electronics
and
Manufacturing Engineering
(RICEME-17)
2
Analisa Perbandingan Perhitungan Event
Related Desynchronization/Event Related
Synchronization (ERD/ERS) pada Brain
Computer Interface Menggunakan Metode
2016 Seminar Nasional Teknik
Elektro - 2016
28
Mastoid Reference dan Common Average
Reference (CAR)
3
Analisa Sinyal EEG Saat Menggerakkan
Kedua Kaki Sebagai FES Control
Command Pada Proses Rehabilitasi Pasien
Pasca Stroke
2014 Seminar
Nasional
Bioteknologi 2014 UBAYA
4
Analisis Pola Sinyal EEG saat Gerakan
Tangan yang didasarkan pada Kemunculan
Event Related Desynchronization (ERD)
dan Event Related Synchronization (ERS)
2014 Seminar
Nasional
29 3. Anggota 2
a. Nama Lengkap : Ellya Zulaikha, ST, M.Sn, Ph.D b. NIP/NIDN : 197510142013122001/0014107503 c. Fungsional/Pangkat/Gol. : Lektor Kepala/Penata/IIIc d. Bidang Keahlian : Metodologi Desain, Desain Produk
e. Departemen/Fakultas : Desain Produk/Fakultas Desain Kreatif dan Bisnis Digital f. Alamat Rumah dan No. Telp. : Galaxi Bumi Permai Blok D5/11 Surabaya, Telp. 08170516662
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
2019 Program Pengembangan Teknologi Industri : Fabrikasi Oftalmoskopi Indirect Portabel, Konektor Video Endoskopi Dan Mobile Application Untuk Kemandirian Produksi Alat Kesehatan Yang Menunjang Telehealth di Indonesia, Sebagai Anggota
2019 Penelitian Dana Departemen ITS : Pengolahan Plastik Daur Ulang Sebagai Material Baru Furniture, Sebagai Ketua
2019 Penelitian Terapan : Desain Portable Commuter Bike Yang Sesuai Dengan Karakteristik Moda Transportasi Kota, Sebagai Anggota
2019 Program Hibah Inovasi Lokal Batch 1: Kajian Kelayakan Bisnis Dan Hki Air Humidifier Ruangan Berpenyejuk Udara Buatan Dengan Inovasi Konsep Detachable Untuk Persiapan Hilirisasi Produk, Sebagai Anggota
2018 Program Pengembangan Teknologi Industri : Pengembangan Air Purifier Bike Untuk Menunjang Upaya Penurunan Tingkat Polusi Udara Kota, Sebagai Anggota
2018 Penelitian Terapan Unggulan Perguruan Tinggi : Usaha Penghematan Konsumsi Energi Listrik Sistem Pengkondisian Udara Pada Gedung Apartemen Melalui Studi Orientasi, Elevasi Dan Material Bangunan, Sebagai Anggota
2018 Penelitian Dana Departemen ITS : Riset Pengembangan Metode Pengolahan Limbah Serat Alam, Sebagai Anggota
2018 Penelitian Dana Departemen ITS: Studi Penggunaan Bahan Anti Semut Alami Untuk Dinnerware, Sebagai Ketua
h. Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
2019 Pengembangan Desain Cincin Kinetik berdasarkan Gerak Ikan, Jurnal Desain IDEA, Vol 18/No.2, h. 48-52
2018 Eksplorasi Talenta dan Kreatifitas Masyarakat Melalui Pelatihan Lukis Aquarelle, Jurnal Abdimas Pedagogi Vol.2/No.1, h.8-14
2018 Pengembangan Desain Kerajinan Manik-Manik Kaca sebagai Tas Wanita, Jurnal Sains dan Seni ITS, Vol.7/No.1, h.26-29
2018 Eksplorasi Material Alami: Bahan Anti Semut untuk Produk Dinnerware, Jurnal Sains dan Seni ITS, Vol.7/No.1, h.178-182
2018 Eksperimen Sistem Sambungan Tanpa Penggunaan Sekrup dan Baut Untuk Display Pameran, Jurnal Sains dan Seni ITS, Vol.7/No.2, h.155-160
2018 Pengembangan Material Serat Sabut Kelapa untuk Home Decor, Jurnal Sains dan Seni ITS, Vol.7/No.2, h.108-112
2017 Eksperimen Sistem Sambungan Rotan Untuk Pengembangan Sarana Duduk Rotan, Jurnal Sains dan Seni ITS, Vol.16/No.1, h.23-26
2019 Analisis Perlakuan Terhadap Material Kayu Dalam Alternatif Pembuatan Tas Wanita. In Prosiding Online Seminar Nasional Batik dan Kerajinan (Vol. 1, No. 1, pp. B8-B8).
30
2018 A Comparison Study between Natural and Synthetics Fiber Cloth to Construct Uniqueness of Hand Painting Fashion Fabric. In 3rd International Conference on Creative Media, Design and Technology (REKA 2018). Atlantis Press.
i. Paten (2) terakhir Tidak ada
j. Tugas Akhir (2 terakhir yang paling relevan), Tesis (2 terakhir yang paling relevan), dan Disertasi (2 terakhir yang paling relevan) yang sudah selesai dibimbing.
31 4. Anggota 3
a. Nama Lengkap
: Eko Agus Suprayitno, S.Si, MT
b. NIP/NIDN
: 1987202011026
c. Fungsional/Pangkat/Gol. : III B
d. Bidang Keahlian
: Instrumentasi Medis, Pemrosesan Sinyal
e. Departemen/Fakultas
: Teknik Biomedik / Fakultas Teknologi Elektro dan
Informatika Cerdas
f. Alamat Rumah dan No. Telp. : Jl. Melati RT/RW:03/02, Desa Tanggul, Wonoayu
-Krian / 081334357320
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang
diusulkan/dilaporkan (
sebutkan sebagai Ketua atau Anggota)
Judul Penelitian
Ketua/Anggota
Rancang Bangun
Phonocardiography
beserta Analisa
Sinyalnya Secara Realtime untuk Mendeteksi Kelainan Jantung
Manusia Lebih Dini
Ketua
Pengembangan Instrumentasi
Phonocardiography
Secara
Wireless dalam Mendeteksi Lebih Dini Kelainan Jantung Manusia
Ketua
h. Publikasi (2) yang paling relevan (
dalam bentuk makalah atau buku)
Penyelenggara
Judul Karya Ilmiah
Link File Karya
Ilmiah
International Seminar On
Intelligent Technology and Its
Applications (SITIA).
Surabaya, May 20th-21st 2015
Institut Teknologi Sepuluh
Nopember (ITS)
ISBN : 978-1-4799-7709-3.
DOI.
10.1109/ISITIA.2015.7219966.
Nada Fitrieyatul Hikmah,
Achmad Arifin, Tri Arief
Sardjono, Eko Agus
Suprayitno.
“A
Signal
Processing
Framework for Multimodal
Cardiac Analysis”
Link Web Published :
http://ieeexplore.ieee.org/ xpl/articleDetails.jsp?arn umber=7219966
AASEC 2019
The 4th Annual Applied Science
and Engineering Conference
Aston Hotel Denpasar Bali, 24
April 2019
Eko
Agus
Suprayitno,
Mochammad Rizal Marlianto,
Metatia Intan Mauliana.
“Meansuring
Instrument
Oxygen Saturation In Blood,
Heart Rate, and Human Body
Temperature
Based Smartphone Android”
Journal of Physics:
Conference
Series,
Volume 1402, Issue
3.
Index : IOPScience
https://iopscience.iop.org/ article/10.1088/1742-6596/1402/3/033110/met a32
i. Paten (2) terakhir
j. Tugas Akhir (2 terakhir yang paling relevan), Tesis (2 terakhir yang paling relevan),
dan Disertasi (2 terakhir yang paling relevan) yang sudah selesai dibimbing.
Judul Skripsi
Strata
Alat Ukur Saturasi Oksigen Dalam Darah, Detak Jantung, Dan Suhu
Tubuh Manusia Berbasis Smartphone Android
S1
Alat Ukur Berat Badan, Tinggi Badan dan Suhu Badan di Posyandu
Berbasis Android
33 Surat Pernyataan Mitra
![Gambar 3. 2 Skematik Rangkaian Boost Converter [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3103059.2329823/11.892.285.609.820.952/gambar-skematik-rangkaian-boost-converter.webp)
![Gambar 3. 4 Ilustrasi Sudut saat Gerakan [10]](https://thumb-ap.123doks.com/thumbv2/123dok/3103059.2329823/13.892.162.726.624.975/gambar-ilustrasi-sudut-saat-gerakan.webp)
![Gambar 3.5 Tahapan dalam Sistem Fuzzy [11]](https://thumb-ap.123doks.com/thumbv2/123dok/3103059.2329823/14.892.278.626.475.588/gambar-tahapan-dalam-sistem-fuzzy.webp)