BAB II
LANDASAN TEORI
Pada bab ini akan dibahas mengenai teori yang mendukung dalam pembuatan proyek akhir ini. Adapun materi yang akan dibahas yaitu: robot, mikrokontroller ATMega 16, ATMega 8, frekuensi radio, transmitter, receiver, motor DC, motor servo, driver motor dengan IC L298 dan driver motor dengan relay.
2.1. Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). Robot biasanya digunakan untuk tugas yang berat, berbahaya dan pekerjaan yang berulang. Belakangan ini robot mulai memasuki pasaran konsumen dibidang hiburan dan alat pembantu rumah tangga, seperti penyedot debu dan pemotong rumput.
Mobile robot adalah konstruksi robot yang memiliki ciri berupa roda sebagai aktuator untuk menggerakkan keseluruhan badan robot, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik lain. Mobile robot ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini dikarenakan membuat
mobile robot tidak memerlukan kerja fisik yang berat. Untuk membuat sebuah mobile robot, yang diperlukan adalah pengetahuan tentang mikrokontroler dan sensor-sensor elektronik. Sedangkan untuk rangka mobile robot dapat dibuat dengan menggunakan plywood atau triplek, akrilik dan logam baik aluminium maupun plat besi.
2.2. Mikrokontroller ATmega 16
Mikrokontroler ATMega16 adalah salah satu mikrokontroler CMOS-8bit berdaya rendah yang termasuk pada tipe AVR dan dilengkapi arsitektur RISC. ATMega16
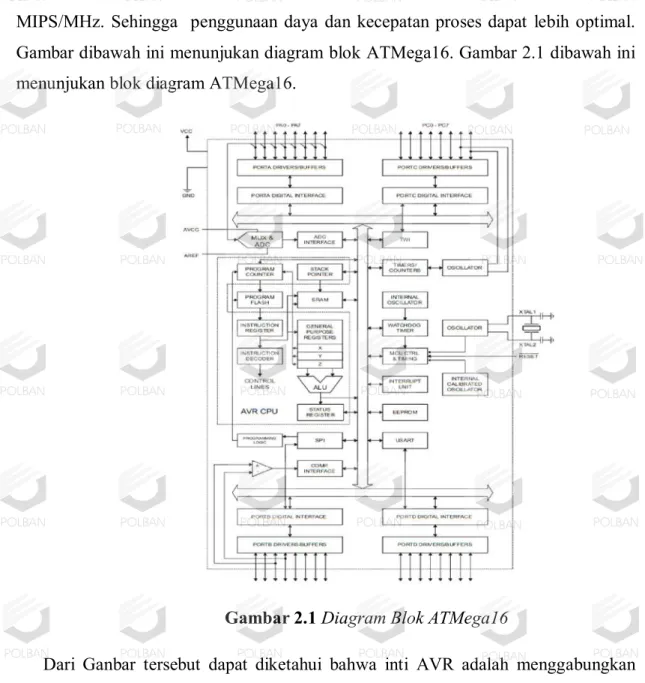
mampu mengeksekusi intruksi hanya dalam sebuah siklus clock dan mencapai 1 MIPS/MHz. Sehingga penggunaan daya dan kecepatan proses dapat lebih optimal. Gambar dibawah ini menunjukan diagram blok ATMega16. Gambar 2.1 dibawah ini menunjukan blok diagram ATMega16.
Gambar 2.1 Diagram Blok ATMega16
Dari Ganbar tersebut dapat diketahui bahwa inti AVR adalah menggabungkan kekayaan intruksi dengan 32 register kerja serba guna yang terhubung langsung dengan ALU. Hal tersebut memungkinkan dua buah register mandiri terakses dengan sebuah instruksi dalam satu siklus clock.
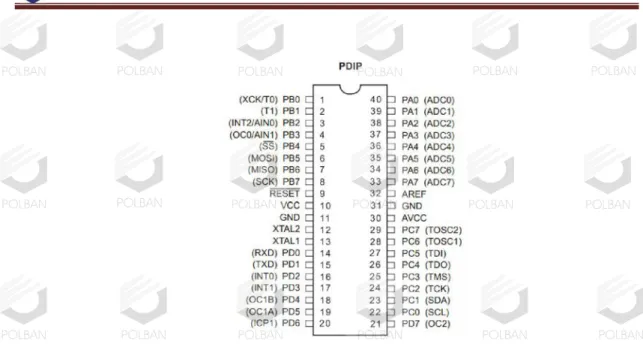
Gambar 2.2 Konfigurasi pin ATMega16
Berikut ini adalah fitur-fitur yang dimiliki mikrokontroler ATMega16:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah timer/counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memory Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
13. Serial TWI atau I2C
Prototipe robot pemindah gelas kimia menggunakan pengendali PC melalui komunikasi nirkabel dengan fasilitas kamera ini menggunakan mikrokontroler yang berfungsi untuk memproses semua data yang masuk dari rangkaian receiver dan
memerintahkan kepada robot untuk bertindak sesuai dengan informasi yang didapatkan dari PC. Selain itu, mikrokontroler digunakan untuk mengatur gerakan roda pengerak robot dan juga mengendalikan penggerak gripper.
2.3. Mikrokontroller ATmega 8
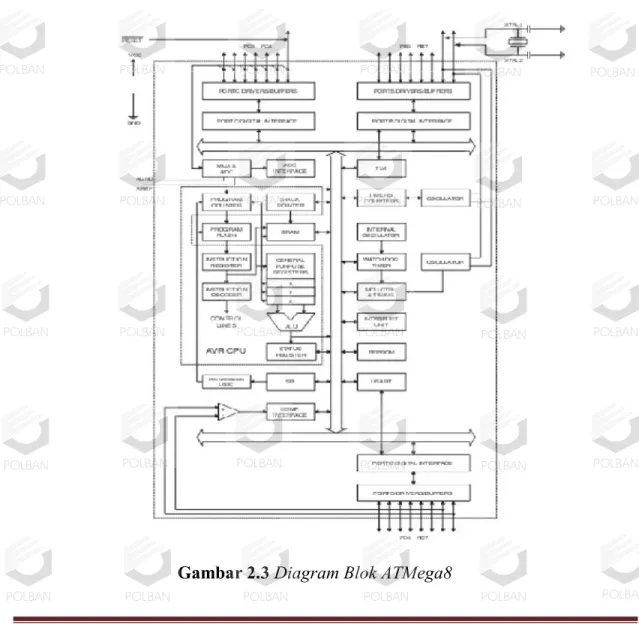
Mikrokontroler ATMega 8 merupakan mikrokontroler CMOS 8-bit berarsitektur AVR RISC yang memiliki 8 KBytes In-System Programmable Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 1 MIPS/MHz. Selain itu mikrokontroler ATmega8 memiliki ADC 10 bit sebanyak 6 saluran.
Gambar 2.3 Diagram Blok ATMega8
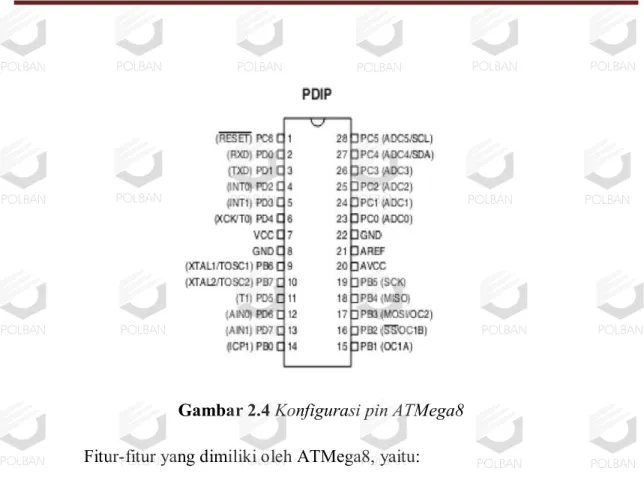
Gambar 2.4 Konfigurasi pin ATMega8
Fitur-fitur yang dimiliki oleh ATMega8, yaitu:
1. Saluran I/O sebanyak 23 buah, yaitu Port B (8 pin), Port C (7 pin), dan Port D (8 pin).
2. ADC 10 bit sebanyak 6 saluran. 3. CPU yang terdiri atas 32 register.
4. Watchdog timer dengan osilator internal. 5. SRAM sebesar 1 Kbyte.
6. Unit interupsi internal dan eksternal.
7. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 8. RC osilator internal yang dapat dikalibrasi
9. Lima mode Sleep
Dalam perancangan alat ini, mikrokontroller ATMega8 digunakan sebagai pengolah data dari input PC yang berupa kode ASCII menjadi data biner paralel 4 bit. Data biner paralel 4 bit ini akan diteruskan ke Encoder untuk diolah menjadi data serial.
2.4. Frekuensi Radio
Frekuensi radio merupakan suatu sinyal arus bolak-balik frekuensi tinggi dengan
range antara 9 kHz-300 GHz yang berjalan terus pada suatu konduktor dan kemudian diradiasikan ke udara melalui sebuah antenna. Antena tersebut selanjutnya akan mengubah suatu sinyal kabel menjadi sinyal wireless dan vice versa. Ketika sinyal AC frekuensi tinggi diradiasikan ke udara, maka akan membentuk gelombang radio. Gelombang radio ini akan menjauh dari sumber ( antena) pada suatu garis lurus di segala jurusan dengan segera. Panjang gelombang dari frekuensi radio tersebut dapat dihitung dengan rumus berikut:
dimana : λ = panjang gelombang (m)
c = kecepatan cahaya (3 x 108 m/s) f = frekuensi (Hz)
2.5. Transmitter
Transmitter adalah rangkaian pengirim data yang mengirimkan data ke receiver, dimana pada alat ini difungsikan sebagai pengirim data dari PC sebagai input pengendali sistem robot pada jarak jauh. Transmitter ini terdiri dari modul RF
transmitter, encoder dan antena. Berikut ini adalah Diagram Blok dari transmitter.
Gambar 2.5 Diagram Blok Rangkaian Transmitter
Antenna ENCODER INPUT RF TRANSMITTER
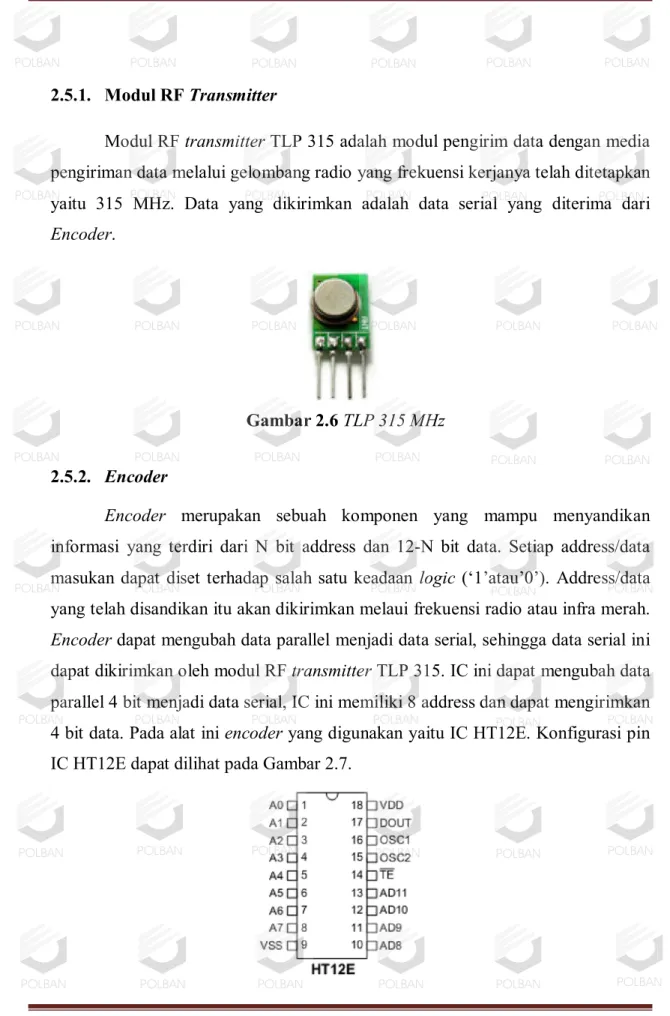
2.5.1. Modul RF Transmitter
Modul RF transmitter TLP 315 adalah modul pengirim data dengan media pengiriman data melalui gelombang radio yang frekuensi kerjanya telah ditetapkan yaitu 315 MHz. Data yang dikirimkan adalah data serial yang diterima dari
Encoder.
Gambar 2.6 TLP 315 MHz
2.5.2. Encoder
Encoder merupakan sebuah komponen yang mampu menyandikan informasi yang terdiri dari N bit address dan 12-N bit data. Setiap address/data masukan dapat diset terhadap salah satu keadaan logic (‘1’atau’0’). Address/data yang telah disandikan itu akan dikirimkan melaui frekuensi radio atau infra merah.
Encoder dapat mengubah data parallel menjadi data serial, sehingga data serialini dapat dikirimkan oleh modul RF transmitter TLP 315. IC ini dapat mengubah data parallel 4 bit menjadi data serial, IC ini memiliki 8 address dan dapat mengirimkan 4 bit data. Pada alat ini encoder yang digunakan yaitu IC HT12E. Konfigurasi pin IC HT12E dapat dilihat pada Gambar 2.7.
Gambar 2.7 Kofigurasi pin IC HT12E
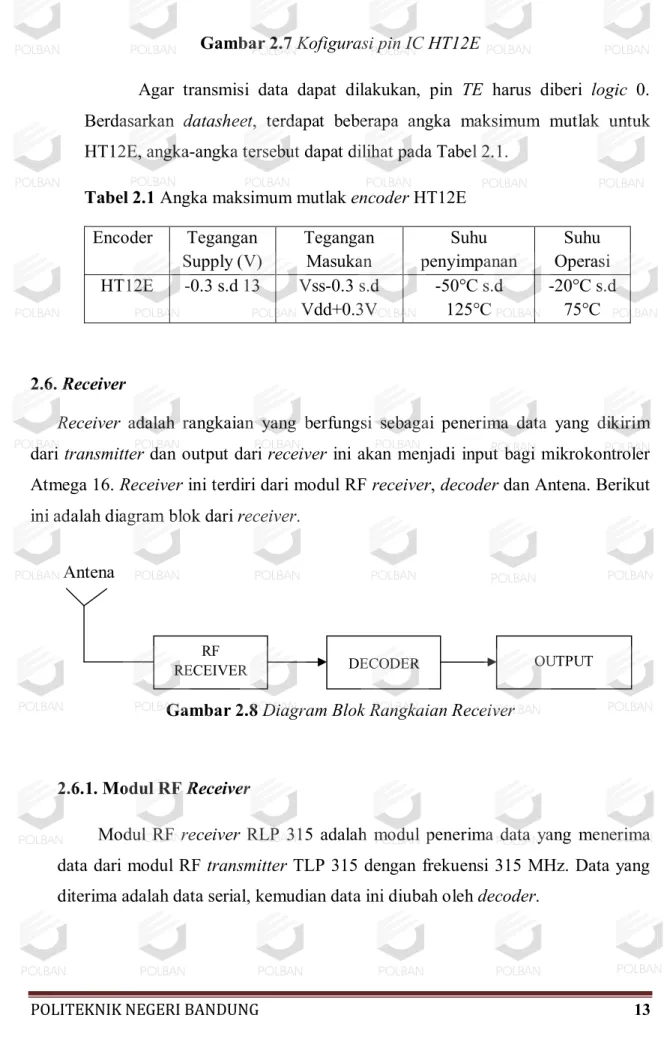
Agar transmisi data dapat dilakukan, pin TE harus diberi logic 0. Berdasarkan datasheet, terdapat beberapa angka maksimum mutlak untuk HT12E, angka-angka tersebut dapat dilihat pada Tabel 2.1.
Tabel 2.1 Angka maksimum mutlak encoder HT12E
2.6. Receiver
Receiver adalah rangkaian yang berfungsi sebagai penerima data yang dikirim dari transmitter dan output dari receiver ini akan menjadi input bagi mikrokontroler Atmega 16. Receiver ini terdiri dari modul RF receiver, decoder dan Antena. Berikut ini adalah diagram blok dari receiver.
Gambar 2.8 Diagram Blok Rangkaian Receiver
2.6.1. Modul RF Receiver
Modul RF receiver RLP 315 adalah modul penerima data yang menerima data dari modul RF transmitter TLP 315 dengan frekuensi 315 MHz. Data yang diterima adalah data serial, kemudian data ini diubah oleh decoder.
Encoder Tegangan Supply (V) Tegangan Masukan Suhu penyimpanan Suhu Operasi HT12E -0.3 s.d 13 Vss-0.3 s.d Vdd+0.3V -50°C s.d 125°C -20°C s.d 75°C Antena DECODER RF RECEIVER OUTPUT
Gambar 2.9 RLP 315 MHz
2.6.2. Decoder
Decoder merupakan komponen yang mempunyai kemampuan untuk menerjemahkan kembali informasi yang sebelumnya telah ditransmisikan melalui frekuensi radio atau infra merah. Informasi ini terdiri dari N bit dari address dan 12-N dari data. Decoder ini merupakan pasangan dari Encoder yang telah dijelaskan sebelumnya dimana dalam sistem operasinya sepasang Encoder-Decoder harus memiliki address yang sama. Data yang diubah adalah data yang diterima dari modul receiver RLP 315. Data paralel ini kemudian diolah oleh mikrokontroler. Decoder menerima informasi address dan data dari receiver yang sebelumnya telah disandikan oleh encoder dan telah ditransmisikan melalui media frekuensi radio atau infra merah.
Pada alat ini decoder yang digunakan yaitu IC HT12D. Konfigurasi pin IC HT12D dapat dilihat pada Gambar 2.10.
Gambar 2.10 Konfigurasi pin IC HT12D
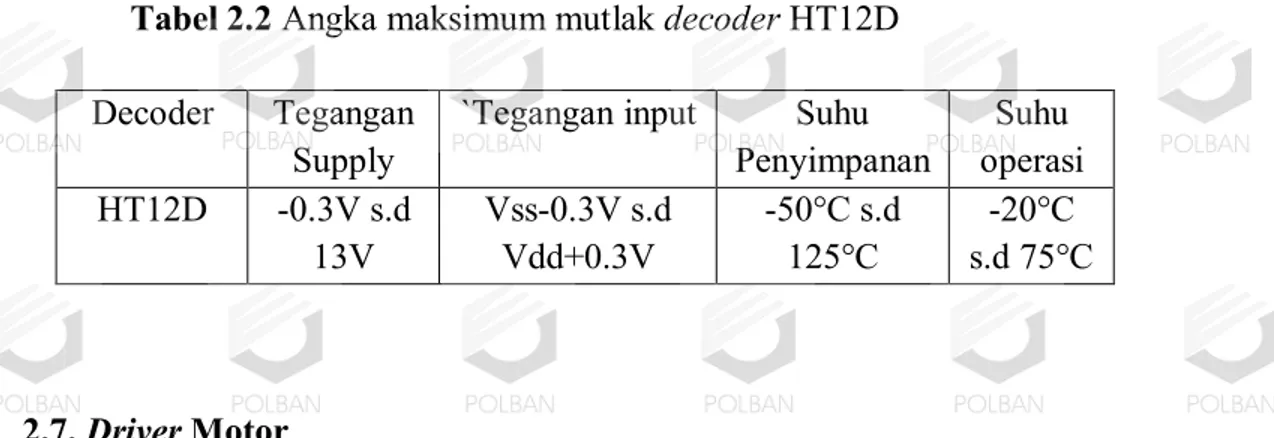
Berdasarkan datasheet, IC HT12D memiliki beberapa angka maksimum mutlak yaitu :
Tabel 2.2 Angka maksimum mutlak decoder HT12D Decoder Tegangan
Supply
`Tegangan input Suhu Penyimpanan Suhu operasi HT12D -0.3V s.d 13V Vss-0.3V s.d Vdd+0.3V -50°C s.d 125°C -20°C s.d 75°C 2.7. Driver Motor
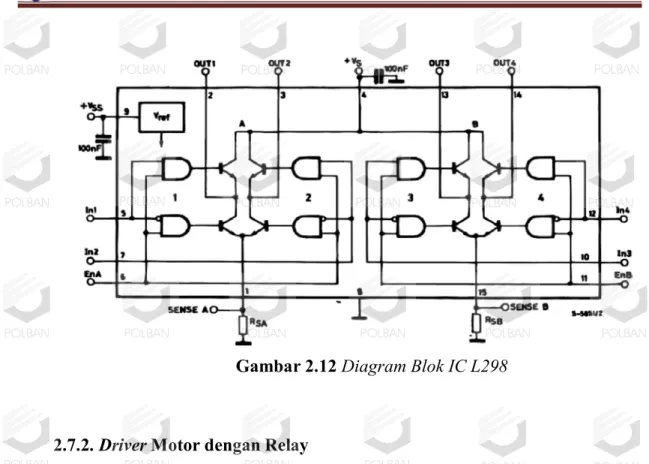
2.7.1. Driver Motor dengan IC L298
Driver motor merupakan rangkaian yang berfungsi untuk mengatur arah putaran dan kecepatan motor DC. Driver motor ini dihubungkan dengan mikrokontroller ATMega16 untuk menerima instruksi apa yang harus dilakukan oleh motor DC. Driver motor yang digunakan pada alat ini yaitu driver yang sudah terintegrasi dalam sebuah IC L298. IC L298 dapat mengatur 2 buah motor DC dengan arus maksimum masing-masing motor mencapai 1 A.
Gambar 2.11 IC Driver Motor L298
Gambar 2.12 Diagram Blok IC L298
2.7.2. Driver Motor dengan Relay
Relay merupakan perangkat elektronika yang berfungsi untuk memutuskan atau menghubungkan suatu jalur aliran listrik. Prinsipnya relay merupakan tuas saklar dengan lilitan kawat pada batang besi (solenoid) didekatnya. Ketika solenoid dialiri arus listrik, tuas akan tertarik karena adanya gaya magnet yang terjadi pada solenoid sehingga kontak saklar akan menutup. Secara umum susunan kontak relay terdiri dari:
Normally Open (NO) : keadaan kontak terbuka pada saat relay tidak dialiri arus.
Normally Close (NC) : keadaan kontak menutup pada saat relay tidak dialiri arus.
NC NO NC NO CO CO COM CO CO COM Motor V motor V coil V coil Diode Diode NPN NPN RE RE Input dari Mikrokontroller Input dari Mikrokontroller RB RB
Gambar 2.13 Rangkain Driver Motor dengan Relay
2.8. Aktuator
2.8.1. Motor DC
Motor DC adalah motor yang memerlukan supply tegangan searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Prinsip kerjanya, kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konverter energi baik energi listrik menjadi energi mekanik (motor) maupun sebaliknya dari energi mekanik menjadi energi listrik (generator) berlangsung melalui medium medan magnet. Energi yang akan diubah dari suatu sistem ke sistem yang lain, sementara akan tersimpan pad medium medan magnet untuk kemudian dilepaskan menjadi energi system lainya. Jadi, medan magnet disini selain berfungsi sebagi tempat penyimpanan energi juga sekaligus proses perubahan energi, dimana proses perubahan energi pada motor arus searah dapat digambarkan pada gambar berikut :
Gambar 2.14 Proses Konversi Energi pada Motor DC
2.8.2. Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah pergerakan rotornya dapat dikendaikan hanya dengan memberikan pengaturan duty cicle sinyal PWM pada bagian pin kontrolnya. Secara garis besar ada 2 jenis motor servo, yaitu motor servo standar 1800 dan motor servo Continuous. Pada proyek akhir ini, motor servo yang digunakan adalah motor servo standar 1800 yang mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 900 sehingga total defleksi sudut dari kanan ke tengah dan ke kiri adalah 1800.
Gambar 2.15 Motor Servo Standar 1800
2.9. Catu Daya
Catu daya yang digunakan pada proyek akhir ini adalah sebuah akumulator atau aki. Aki atau Storage Battery adalah sebuah sel atau elemen sekunder dan merupakan sumber arus listrik searah yang dapat mengubah energy kimia menjadi energy listrik. Aki termasuk elemen elektrokimia yang dapat mempengaruhi zat pereaksinya, sehingga disebut elemen sekunder. Jenis aki yang digunakan adalah aki kering. Aki
Energi Listrik Medan Magnet Energi Mekanik
kering merupakan bentuk pengembangan dari aki basah yang sudah lama dikenal konsumen. Perbedaan fisik yang langsung terlihat adalah pada warna wadah yang gelap / tidak transparan dan tidak adanya lubang-lubang untuk mengisi air aki. Cairan berbentuk gel digunakan sebagai pengganti cairan elektrolit. Gel ini sangat minim tingkat penguapannya dan pada saat menguap pun, uap tersebut tidak dibuang keluar wadah,tetapi masuk lagi ke dalam wadah (Maintenance Free).
Gambar 2.16 Aki Kering
2.10. Perbandingan Proyek Akhir
Robot yang akan direalisasikan untuk proyek akhir ini merupakan hasil tinjauan dari proyek akhir yang telah dibuat, yaitu “Sistem Kontrol Prototipe Robot Pemindah Tabung Melalui Komunikasi Tanpa Kabel” yang dirancang oleh Benfany Aditia (2010) dan “Prototipe Robot Pemindah Kotak Komponen Menggunakan Komunikasi Tanpa Kabel” yang dirancang oleh Dadin dan Ihsan Maulana (2011). Dengan menjadikan kedua robot tersebut sebagai referensi, diharapkan kekurangan yang ada pada robot tersebut dapat diminimalisasi dan mampu menampilkan kelebihan yang maksimal. Salah satu kelebihan dari robot yang akan dirancang adalah pengendaliannya yang menggunakan PC dan dilengkapi sebuah kamera yang akan mengirimkan gambar ke PC.
Berikut ini tabel perbandingan antara tugas akhir sebelumnya dengan rencana tugas akhir yang telah dibuat.
Tabel 2.3 Tabel perbandingan proyek akhir sebelumnya dengan tugas akhir yang dirancang SISTEM KONTROL PROTOTIPE ROBOT PEMINDAH TABUNG MELALUI KOMUNIKASI TANPA KABEL Benfany Aditia (2007) PROTOTIPE ROBOT PEMINDAH KOTAK KOMPONEN MENGGUNAKAN
KOMUNIKASI TANPA KABEL (BAGIAN AKTUATOR)
Dadin dan Ihsan Maulana(2008)
PROTOTIPE ROBOT PEMINDAH GELAS KIMIA MENGGUNAKAN PENGENDALI PC MELALUI KOMUNIKASI NIRKABEL DENGAN FASILITAS KAMERA
Input: Joy stick Line Follower Input : PC
SARAN :
1. Perancangan mekanik yang lebih baik, dengan menempatkan baterai serendah mungkin pada bagian robot, sehingga tidak menimbulkan efek kelembaman saat kecepatan robot beralih dari cepat ke kondisi berhenti. 2. Mengangkat beban yang lebih
berat, dengan menggunakan jenis motor yang memiliki torsi lebih besar seperti motor dc jenis worm gear. selain itu merubah sistem pengangkatan gripper dengan sistem mekanik yang lebih handal.
3. Dapat ditambahkan kamera sehingga gerakan robot dapat di control dari tempat lain.
SARAN :
1. Gunakan sistem kendali PI, PD, PID dalam proses pengendalian navigasi robot.
2. Sebaiknya digunakan kamera sebagai sensor pendeteksi kotak komponen dan pendeteksi garis, karena dengan menggunakan
photodiode masih terpengaruhi oleh pencahayaan dari luar yang kurang stabil.
3. Menambah pergerakan gripper
untuk pengambilan benda yang tidak hanya satu posisi pada satu lokasi dan menambahkan penampang pada robot agar robot dapat membawa kotak komponen lebih dari satu.
PLAN : 1. Kontrol dari PC. Pergerakan robot dikontrol menggunakan PC. Komunikasi yang digunakan yaitu komunikasi Radio Frekuensi (RF). 2. Kamera
Kamera digunakan untuk control user
mengendalikan gerak robot dan melihat objek. 3. User bisa mengendalikan robot tanpa harus melihat robot.