METODE ESTIMASI PENYEBARAN POLUTAN DI UDARA
ESTIMATION METHODS FOR AIR POLLUTION
DISTRIBUTION
Erna Apriliani*, Hanafi, Wahyuningsih
Jurusan Matematika, Institut Teknologi Sepuluh Nopember Jl. Arief Rahman Hakim, Sukolilo, Surabaya 60111
*e-mail: [email protected]
Abstrak
Estimasi penyebaran polutan perlu dilakukan agar dapat diketahui tingkat polusi suatu lokasi, sehingga dapat digunakan untuk menentukan langkah-langkah pengurangannya. Pada penelitian ini dibahas beberapa metode yang dapat digunakan untuk melakukan estimasi penyebaran polutan di udara. Metode yang digunakan yaitu: metode numerik (metode Euler dan Runge Kutta), metode asimilasi data (filter Kalman), dan metode Recursive Least Square (RLS). Langkah-langkah dari ketiga metode tersebut dijelaskan beserta hasil simulasinya. Tingkat akurasi dari ketiga metode tersebut tidak dibandingkan, tapi dianalisis beberapa kelebihan dan kelemahan masing-masing metode. Lokasi yang diambil adalah Kota Surabaya. Konsentrasi polutan karbonmonoksida. Kesimpulan dari penelitian ini adalah metode numerik kurang tepat digunakan untuk estimasi sesuai kondisi nyata yang sangat bervariatif, metode RLS membutuhkan data konsentrasi polutan terurut yang cukup banyak pada posisi tertentu, sedangkan metode asimilasi data dapat dipergunakan untuk estimasi konsentrasi polutan dengan data yang jauh lebih sedikit dan dapat mengestimasi untuk banyak lokasi sesuai yang diinginkan.
Kata kunci: estimasi, polusi udara, metode numerik, RLS, Kalman filter.
Abstract
Air pollution is the real problem in the metropolitan city and industrial area. Estimation of air pollution distribution is important for recommending emission minimization. Three estimation methods for air pollution distribution, namely numerical method (Euler and Runge-Kutta method), Recursive Least Square method and data assimilation (Kalman Filter) method were applied in this research. The algorithms and the simulations were described, the accuracy of each method was not compared, but the advantages and disadvantages of these methods were described. Distribution of carbon monoxide in Surabaya was estimated using these methods. This research showed that numerical method could not be applied in real condition. The RLS method needed a lot of time series data of concentration of pollution. The data assimilation method could be applied in real condition with a few time series pollutant data, and for estimating pollutant concentrations in some locations.
Keywords:estimation, air pollution, numerical method, RLS, Kalman filter.
1. PENDAHULUAN
Polusi udara merupakan masalah yang muncul pada daerah perkotaan dan daerah industri. Kepadatan kendaraan bermotor serta polusi
kadar polutan di udara antara lain: pengukuran langsung pada beberapa tempat, pemodelan dan simulasi, estimasi berdasarkan data hasil pengukuran dan sebagainya.
Metoda Kalman Filter telah diterapkan oleh Harter et al. (2004) untuk monitoring kualitas udara. Penerapan metoda Kalman Filter pada kualitas udara dilakukan dengan memperha-tikan faktor waktu. Artinya sistem dalam kondisi steady state (Harter et al., 2004). Sedangkan metode Recursive Least Square (RSL) dan ARCH telah diterapkan pada pemodelan masalah lingkungan berdasarkan data time series (Fasso, 2000).
Pada makalah ini ditampilkan tiga metode yang digunakan untuk mengestimasi penyeba-ran polutan di udara, yaitu metode numerik (Euler dan Runge-Kutta) untuk menggam-barkan penyebaran polutan berdasarkan model matematika yang sudah ada. Metode RLS, yaitu metode untuk meramalkan konsentrasi polutan berdasarkan data pengukuran masa lalu. Metode asimilasi data, khususnya Filter Kalman, yaitu metode yang merupakan penggabungan antara model matematika dan data pengukuran secara terus menerus.
Data yang digunakan untuk penerapan ketiga metode tersebut adalah data konsentrasi polutan CO di Kota Surabaya pada tahun 2007. Jenis polutan yang dapat diukur oleh alat pemantau kualitas udara tersebut adalah SO2, CO, NO2, O3 dan PM10. Pada penelitian
ini hanya akan diestimasi polutan jenis CO yang disebabkan asap kendaraan dan industri, terutama industri besi dan baja. Jumlah CO yang melebihi ambang baku mutu lingkungan dapat memberikan dampak negatif pada kesehatan manusia, khususnya mengurangi pengangkutan oksigen dalam darah.
Untuk melakukan peramalan maupun estimasi diperlukan beberapa informasi, antara lain data konsentrasi polutan tersebut untuk kurun waktu yang cukup, yaitu lebih dari 50 data dengan waktu terurut (time series), atau model matematika dari konsentrasi polutan. Menurut Nevers (1995) dan Hanea (2005), persamaan konsentrasi polutan di udara dalam dua dimensi, atau yang dikenal dengan nama model difusi Gauss, dapat dituliskan sebagai berikut:
masing-masing adalah koefisien difusi pada arah x dan y, sedangkan Ux dan Uy
masing-masing merupakan kecepatan angin pada arah
x dan y.
Berdasarkan data dan informasi yang tersedia dilakukan peramalan dan estimasi dengan menggunakan metode numerik RLS dan Kalman Filter.
2. METODA
Metode Numerik
Metode numerik yang digunakan adalah metode Euler Runge Kutta untuk menges-timasi penyebaran polutan CO. Langkah-langkah yang dilakukan antara lain: mendis-kritkan model matematika penyebaran kon-sentrasi polutan dengan menggunakan metode beda maju terhadap waktu dan beda pusat terhadap posisi x, y.
Dengan mengasumsikan koefisien difusi (D) konstan dan kecepatan angin (U) berubah-ubah, maka persamaan (1) dapat dituliskan dalam persamaan 2.
Apriliani, Metode Estimasi Penyebaran Polutan di Udara 55
Selanjutnya dilakukan pendiskritan terhadap posisi x dan y dengan menggunakan beda pusat, diperoleh:
Pendiskritan dilakukan sampai 10 titik yaitu i,j1,2,...,10.Penyelesaian persamaan (3) diperoleh dengan menggunakan Euler Runge-Kutta. Pada metode ini diperlukan data sebagai kondisi awal dari simulasi.
Recursive Least Square (RLS)
Metode RLS merupakan metode identifikasi dan estimasi parameter yang dilakukan berdasarkan data time series. Langkah-langkah yang perlu dilakukan antara lain: pengumpulan data, perumusan model, identifikasi parameter dan estimasi konsentrasi polutan dengan menggu-nakan RLS.
Data yang diambil adalah data konsentrasi polutan udara yaitu CO (karbon monoksida) di Surabaya (SUF 1) pada tanggal 11 Januari 2007 sampai dengan 19 Maret 2007. Data yang diperoleh merupakan data time series sebanyak 60 buah, 48 data pertama digunakan sebagai data training sedangkan 12 data waktu berikutnya digunakan sebagai data testing.
Langkah-langkah secara detail adalah melakukan plot data tersebut, plot
autocorrelation function (ACF) untuk
mengetahui apakah data tersebut membentuk model moving average (MA) dan partial
autocorrelation function (PACF) untuk
mengetahui apakah data membentuk model
autoregressive (AR), selanjutnya dilakukan uji
model sementara AR(1), uji residual AR(1) yang terdiri dari uji white noise dan uji kenormalan (Johansson,1993). Dari pengujian tersebut diperoleh kesimpulan bahwa model yang terbentuk adalah model AR(1) sebagai
persamaan (4) dapat dituliskan dalam bentuk perkalian matriks sebagai berikut:
atau dapat dituliskan:
1
Berdasarkan model pada persamaan (6) dilakukan identifikasi parameter dan estimasi konsentrasi CO ( ). Algoritrma RLS yang digunakan ada dua langkah yaitu identifikasi parameter dan estimasi konsentrasi polutan CO sebagai berikut:
1. Identifikasi parameter
2. Estimasi konsentrasi CO
n
masing-masing merupakan estimasi eror, konsentrasi CO pada waktu ke n yang diperoleh dari data hasil pengukuran, kovariansi kesalahan estimasi, data masukan berupa konsentrasi CO pada waktu sebelumnya, parameter yang diidentifikasi yaitu
1
dan estimasi konsentrasi polutan CO. Pada metode ini identifikasi parameter,estimasi konsentrasi polutan dan pengukuran konsentrasi polutan dilakukan bergantian secara simultan dan terus menerus. Metode ini dapat juga digunakan untuk melakukan peramalan konsentrasi CO tanpa melakukan pengukuran. Sehingga konsentrasi polutan dapat digantikan oleh hasil estimasi.
Filter Kalman
Metode Kalman Filter merupakan metode estimasi sistem dinamik stokastik yang dilakukan dengan cara menggabungkan antara model matematika dan data hasil pengukuran. Estimasi dilakukan secara rekursi terdiri dari dua tahap yaitu tahap prediksi dan tahap koreksi. Dalam kasus ini model matematika yang digunakan adalah model pada persama-an (2). Langkah-langkah yang dilakukan yaitu:
a. Pendiskritan model pada persamaan (2) dengan menggunakan beda maju untuk waktu dan beda pusat untuk posisi. Dari proses pendiskritan diperoleh:
k
Dengan nilai-nilai a,b,c,d,e berupa konstanta yang terbentuk karena pendiskritan, i,j= 1,2,3,...,10, Cik,j adalah konsentrasi polutan CO pada posisi ke i,j dalam waktu ke k.
b. Membentuk persamaan menjadi bentuk ruang keadaan (state space). Dari persamaan dalam bentuk diskrit di atas dapat dituliskan sebagai perkalian matriks yang dikenal dengan nama persamaan ruang keadaan Xk1 AXk, sebagai berikut:
k k k k k k k
Tk C C C C C C C
X 1,1 1,2 ... 1,10 2,1 ... 2,10 ... 10,1 ... 10,10 (12)
A merupakan matriks konstan berukuran 100 x 100 yang diperoleh dari proses pendiskritan.
Apriliani, Metode Estimasi Penyebaran Polutan di Udara 57
digunakan untuk mengestimasi variabel keadaan (Ck) maka harus
didefinisikan persamaan pengukuran sebagai berikut:
k k HX
Z (13)
Matriks H merupakan matriks yang menghubungkan antara data hasil pengukuran dengan variabel yang diestimasi.
d. Mendefinisikan noise yang terjadi pada model dan pengukuran. Pada saat melakukan pemodelan sering kali diambil asumsi-asumsi yang mungkin tidak terjadi pada sistem sebenarnya. Asumsi tersebut dilakukan untuk kesederhanaan model dan mungkin juga memang tidak dapat dimasukkan dalam model sehingga perlu ditambahkan noise pada model sistem dan pengukuran, sehingga persamaan sistem dan pengukurannya adalah sebagai berikut:
k k
k AX GW
X 1 (14)
k k k HX V
Z (15)
Noise pada sistem adalah Wk ~ N(0,Q),
sedangkan derau pada pengukuran adalah
) , 0 (
~ N R
Vk . Berdasarkan persamaan sistem dan persamaan pengukuran tersebut diterapkan filter Kalman untuk mengestimasi konsentrasi polutan CO.
e. Penyusunan algoritma filter Kalman (Lewis, 1986) untuk estimasi polutan CO dengan tapan sebagai berikut:
Tahap Prediksi:
k k k AX Bu
X 1()
t t
k k
k AP A GQG
P1()
Tahap Koreksi:
11 1
1 ( ) ( )
P H HP H R
Kk k t k t
1
1( )1
k k
k I K H P P
) ( )
( 1 1 1
1
1
k k k k
k X K Z HX
X
f. Simulasi
Simulasi dapat dilakukan berdasarkan algoritma pada langkah e, dan memban-dingkan hasil estimasi dengan data pengukuran yang dibangkitkan dari sistem dinamik stokastik yang terbentuk.
1. HASIL DAN PEMBAHASAN
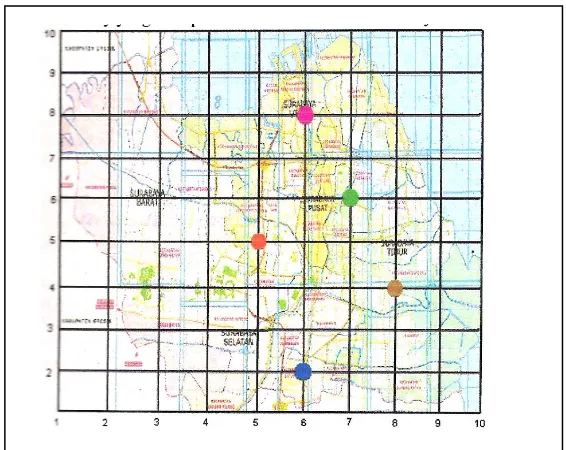
Untuk metode Euler Runge-Kutta dan filter Kalman, denah Kota Surabaya dibagi menjadi 100 lokasi yaitu 10 mendatar dan 10 vertikal seperti pada Gambar 1. Titik-titik menunjuk-kan contoh lokasi penempatan alat ukur.
Dengan menggunakan metode Runge-Kutta diperoleh penyebaran polutan CO pada seluruh daerah yang akan diestimasi di Kota Surabaya. Diasumsikan tidak ada sumber polutan. Kondisi awal polutan pada seluruh daerah diperoleh dari data pengukuran di lima lokasi seperti tercantum pada Tabel 1. Sedangkan pada posisi yang tidak terukur diambil rata-rata dari kelima data tersebut yaitu 0,79 mg/m3. Estimasi polutan dengan menggunakan RLS data yang digunakan adalah konsentrasi polutan pada satu daerah tertentu untuk satu satuan waktu sebelumnya, sehingga metode RLS ini lebih efisien dibandingkan dengan metode identifikasi parameter time series murni dengan menggunakan Minitab. Pada metode ini konsentrasi polutan di daerah lain tidak dapat dideteksi.
Gambar 1. Lokasi Penempatan Alat Ukur di Kota Surabaya
Tabel 1. Kondisi Awal Konsentrasi Polutan CO
Lokasi Pengukuran Konsentrasi CO (mg/m3)
Taman Prestasi (7,6) 0.69
Perak Timur (6,8) 0.58
Sukomanunggal (5,5) 0.83
Gayungan (6,2) 0.65
Arif Rahman Hakim (8,4) 0.41
Sumber: Bapedal Surabaya
Dari hasil simulasi diperoleh penyebaran konsentrasi polutan CO berupa kontur dan plot tiga dimensi untuk waktu iterasi 30
dengan kecepatan angin u=7.254 km/jam pada Gambar 2 dan Gambar 3.
Gambar 2. Kontur Penyebaran CO dengan Runge Kutta 8.73
17.5
26.2 34.9
43.6 52.4
61.1 69.878.687.396
96
105
105
113
113
122
122
131
131
140
140
148
148
157 166
175183
192 201
210
218 227
236
244 253271 262
arah longitudinal
a
ra
h
t
ra
n
s
v
e
rs
a
l
Kontur Konsentrasi polutan dengan Runge Kutta
1 2 3 4 5 6 7 8 9 10
Apriliani, Metode Estimasi Penyebaran Polutan di Udara 59
0 2
4 6
8 10
0 5
10 0 100 200 300
arah longitudinal Konsentrasi polutan dengan runge Kutta
arah transversal
k
o
n
s
e
n
tr
a
s
i
p
o
lt
a
n
Gambar 3. Konsentrasi CO dalam Tiga Dimensi dengan Euler Runge-Kutta
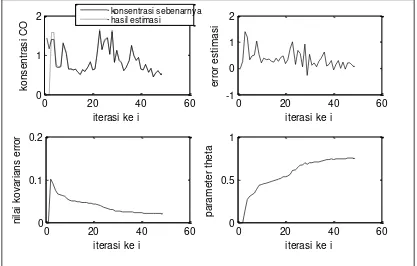
Hasil identifikasi dan estimasi konsentrasi CO pada satu lokasi pemantau kualitas udara diberikan pada Gambar 4. Pada bagian kiri atas Gambar 4, konsentrasi CO berdasarkan data pengukuran dan hasil estimasi, mulai waktu ke 30 tampak hasil yang tidak jauh berbeda. Eror estimasi konvergen menuju
nol (Gambar 4 kanan atas). Identifikasi parameter menunjukkan bahwa parameter mendekati nilai 0.6 (Gambar 4 bagian kanan bawah) setelah waktu ke 30 juga. Demikian pula halnya dengan kovariansi eror dari RLS menunjukkan nilai mendekati nol (Gambar 4 bagian kiri bawah).
0 20 40 60
0 1 2
iterasi ke i
k
o
n
s
e
n
tr
a
s
i
C
O
konsentrasi sebenarnya hasil estimasi
0 20 40 60
-1 0 1 2
iterasi ke i
e
rr
o
r
e
s
ti
m
a
s
i
0 20 40 60
0 0.1 0.2
iterasi ke i
n
ila
i
k
o
v
a
ri
a
n
s
e
rr
o
r
0 20 40 60
0 0.5 1
iterasi ke i
p
a
ra
m
e
te
r
th
e
ta
0 10 20 30 40 50 60 70 80 90 100
Konsentrasi polutan CO
posisi ke i
n
-2.0229-1.0646 -1.0646-2.0229
-1.0646
-1.0646
-1.0646 -1.0646
-1.0646
Plot Kontur Penyebaran CO di Udara
arah longitudinal
Gambar 6. Kontur Penyebaran Konsentrasi CO dengan Filter Kalman
Dari hasil estimasi dengan menggunakan filter kalman diperoleh penyebaran konsentrasi polutan CO untuk seluruh daerah berdasarkan beberapa data pengukuran seperti yang ditunjukkan pada Gambar 5 dan 6. Sistem sebenarnya diperoleh dari data pembangkitan dengan matlab berdasarkan Persamaan 8. Tampak dari hasil simulasi tersebut estimasi dengan filter kalman mendekati sistem sebenarnya.
Metode numerik, khususnya Runge-Kutta, menggunakan data hasil pengukuran hanya
Apriliani, Metode Estimasi Penyebaran Polutan di Udara 61
noise pemodelan. Kenyataannya tidak ada
sistem real yang sempurna seperti model yang telah dipilih, pasti terdapat asumsi-asumsi yang sebenarnya merupakan noise yang tidak dapat dimodelkan.
Pada metode RLS, peramalan dilakukan berdasarkan data time series masa lalu. Data yang dibutuhkan harus cukup banyak (lebih dari 50) agar dapat menggambarkan model yang mendekati sebenarnya. Data tersebut hanya dapat digunakan untuk meramalkan konsentrasi polutan pada satu daerah tertentu saja, misalnya posisi (6,2), yaitu perpotongan posisi horisontal garis ke 6 dan vertikal garis ke 2 dari Gambar 1.
Jika ingin diketahui konsentrasi polutan CO untuk 10 lokasi di Kota Surabaya, maka data yang dibutuhkan harus lebih dari 500 data, atau masing-masing minimal 50 data terurut untuk sepuluh lokasi tersebut. Model yang digunakan juga bukan lagi ARMAX, melainkan model ARMAX untuk 10 variabel yang simultan, yang tidak dilakukan pada penelitian ini. Pada filter Kalman dilakukan penggabungan antara pemodelan dan data pengukuran, sehingga data yang dibutuhkan jauh lebih sedikit. Metode ini juga dapat mengantisipasi adanya kenaikan konsentrasi polutan dengan memasukkan data pengukuran pada algoritma filter Kalman.
Dalam penelitian ini lokasi yang akan diestimasi konsentrasi CO nya adalah 100 lokasi berdasarkan beberapa data pengukuran. Misalnya pada 5 lokasi pengukuran pada filter Kalman diperlukan estimasi awal C0 untuk memprediksi satu
satuan waktu kedepan C1(-), pada waktu
1
k diperoleh data pada 5 lokasi tersebut
Z1. Data tersebut digunakan untuk
memperbaiki hasil prediksi konsentrasi waktu ke 1, yaitu C1 untuk 100 lokasi. Estimasi C1
digunakan untuk memprediksi konsentrasi waktu ke 2 C1(-) dan seterusnya. Prediksi dan
koreksi dilakukan secara terus menerus. Hal
ini mengakibatkan data terurut waktu yang diperlukan hanya satu satuan waktu sebelumnya. Oleh karena itu, sebenarnya estimasi yang dilakukan dengan menggu-nakan filter Kalman dapat merupakan estimasi online apabila tersedia interface
antara data pengukuran dan komputer yang menjalankan simulasi. Selain itu filter Kalman juga dapat digunakan untuk menentukan posisi alat ukur sehingga data pengukuran yang jumlahnya terbatas dapat digunakan untuk mengestimasi kadar polutan pada 100 lokasi tersebut.
2.KESIMPULAN
Model yang terbentuk pada metode numerik tersebut adalah model dinamik deterministik, dimana tidak ada data pengukuran yang mempengaruhi hasil simulasi. Untuk kondisi nyata yang sangat variatif maka metode ini kurang tepat.
Model pada RLS merupakan model dinamik stokastik, yang memerlukan data dengan waktu terurut yang cukup banyak. Hanya dapat digunakan untuk mengestimasi pada satu posisi saja.
Filter kalman merupakan penggabungan dari model deterministik dan data pengukuran dengan memasukkan faktor noise sistem dan pengukuran. Data pengukuran yang diperlukan tidak perlu terurut untuk waktu yang panjang tetapi satu waktu sebelumnya. Dengan mengukur pada beberapa lokasi maka dapat diestimasi kadar polutan untuk 100 lokasi yang diinginkan. Untuk sistem yang variatif maka metode filter kalman ini dapat digunakan.
UCAPAN TERIMA KASIH
Beberapa bagian dari penelitian ini merupakan hasil kerja Tugas Akhir dari Thina Ardliana, Nona P. Berliandi, dan Lia Dwi Rahmawati, mahasiswa S1 Matematika ITS, dibawah bimbingan penulis. Oleh karena itu, kami ucapkan terima kasih pada mereka.
DAFTAR PUSTAKA
Fasso, A. (2000). Recursive Least Square with ARCH Errors and Non Parametric Modeling of Environmental Time Series, University of Bergamo, Italy. http://dspaceunibg.cilea.it/bitstream/104 46/980/1/Graspa6_fassoecursive.p-df, diunduh May 2011.
Hanea, R. (2005). Data Assimilation Concept and The Kalman Filter Approach, Bahan RWS. TU Delft.
Harter, F.P., Velho H. F. C, Chamon, M.A. (2004). Kalman Filtering in the Air Quality Monitoring,
http://mtc-m16.sid.inpe.br/col/sid.inpe.br/mar ciana, diunduh 2 Juni 2011.
Johansson, R. (1993). System Modeling and Identification, International. New Jer-sey, Prentice Hall.
Lewis, FL. (1986). Optimal Estimation with an Introduction to Stochastic Control Theory. John Wiley & Sons.
Nevers, N.D. (1995). Air Pollution Control Engineering. McGraw-Hill, Inc. New York