M O D U L E L E K T R O N I K A D A N M E K A T R O N I K A
P E N G E N D A L I A N
S I S T E M P N E U M A T I K
M E N G G U N A K A N P L C
S I E M E N S S 7 P C - 3 0 0
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
MODUL PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN PLC SIEMENS
S7 PC-300
Untuk Sekolah Menengah Kejuruan
Edisi Tahun 2017
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN DIREKTORAT JENDERAL PENDIDIKAN DASAR DAN MENENGAH
MODUL PENGEN
MODUL PENGENDALIAN SISTEM PNEUMATIK
MENGGUNAKAN PLC SIEMENS S7 PC-300
Copyright © 2017, Direktorat Pembinaan SMK
All rights Reserved
Pengarah
Direktur Pembinaan SMK
Penanggung Jawab
Arie Wibowo Khurniawan, S.Si. M.Ak
Kasubdit Program dan Evaluasi, Direktorat Pembinaan SMK
Ketua Tim
Arfah Laidiah Razik, S.H., M.A.
Kasi Evaluasi, Subdit Program dan Evaluasi, Direktorat Pembinaan SMK
Penyusun
Budiyanto
(SMK Ma’arif Kota Mungkid Jawa Tengah)
Desain dan Tata Letak
Rayi Citha Dwisendy, S.Ds
ISBN
Penerbit:
Direktorat Pembinaan Sekolah Menengah Kejuruan
Komplek Kementerian Pendidikan dan Kebudayaan, Gedung E, Lantai 13 Jalan Jenderal Sudirman, Senayan, Jakarta 10270
ISBN 978-602-5517-02-0
978-602-5517-02-0
MODUL PENGEND
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI
Assalamu’alaikum Warahmatullahi Wabarakatuh Salam Sejahtera,
Melalui Instruksi Presiden (Inpres) Nomor 9 Tahun 2016 tentang Revitalisasi Sekolah Menengah Kejuruan (SMK), dunia pendidikan khususnya SMK sangat terbantu karena akan terciptanya sinergi antar instansi dan lembaga terkait sesuai dengan tugas dan fungsi masing-masing dalam usaha mengangkat kualitas SMK. Kehadiran Buku Serial Revitalisasi SMK ini diharapkan dapat memudahkan penyebaran informasi bagaimana tentang Revitalisasi SMK yang baik dan benar kepada seluruh stakeholder sehingga bisa menghasilkan lulusan yang terampil, kreatif, inovatif, tangguh, dan sigap menghadapi tuntutan dunia global yang semakin pesat.
Buku Serial Revitalisasi SMK ini juga diharapkan dapat memberikan pelajaran yang berharga bagi para penyelenggara pendidikan Kejuruan, khususnya di Sekolah Menengah Kejuruan untuk mengembangkan pendidikan kejuruan yang semakin relevan dengan kebutuhan masyarakat yang senantiasa berubah dan berkembang sesuai tuntuan dunia usaha dan industri.
Tidak dapat dipungkuri bahwa pendidikan kejuruan memiliki peran strategis dalam menghasilkan manusia Indonesia yang terampil dan berkeahlian dalam bidang-bidang yang sesuai dengan kebutuhan. Terima kasih dan penghargaan kami sampaikan kepada semua pihak yang terus memberikan kontribusi dan dedikasinya untuk meningkatkan kualitas Sekolah Menengah Kejuruan. Buku ini diharapkan dapat menjadi media informasi terkait upaya peningkatan kualitas lulusan dan mutu Sumber Daya Manusia (SDM) di SMK yang harus dilakukan secara sistematis dan terukur.
Wassalamu`alaikum Warahmatullahi Wabarakatuh
Jakarta, 2017
MODUL PENGEND
Puji syukur kami panjatkan kepada Tuhan Yang Maha Esa atas tersusunnya buku teks ini, dengan harapan dapat digunakan sebagai buku teks untuk siswa Sekolah Menengah Kejuruan (SMK) Bidang Studi Keahlian Teknologi Dan Rekayasa, Teknik Mekatronika.
Modul pembelajaran ini disusun berdasarkan tuntutan paradigma pengajaran dan pembelajaran kurikulum 2013 yang diselaraskan berdasarkan pendekatan model pembelajaran yang sesuai dengan kebutuhan belajar kurikulum abad 21, yaitu peningkatan keterampilan berdasarkan tuntutan kebutuhan industri. Penyajian modul pembelajaran ini disusun dengan tujuan agar supaya peserta didik dapat melakukan proses pencarian pengetahuan berkenaan dengan materi pelajaran melalui berbagai aktivitas proses sains sebagaimana dilakukan oleh para ilmuwan dalam melakukan eksperimen ilmiah (penerapan scientifik), dengan demikian peserta didik diarahkan untuk menemukan sendiri berbagai fakta, membangun konsep, dan paradigma baru secara mandiri.
Kementerian Pendidikan dan Kebudayaan, Direktorat Pembinaan Sekolah
Menengah Kejuruan, dan Direktorat Jenderal Peningkatan Mutu Pendidik dan Tenaga
Kependidikan menyampaikan terima kasih, sekaligus saran kritik demi kesempurnaan
buku teks ini dan penghargaan kepada semua pihak yang telah berperan serta dalam
membantu terselesaikannya buku teks siswa jurusan teknik Mekatronida di tingkat Sekolah Menengah Kejuruan (SMK).
Jerman, 1 April 2017
Penulis
MODUL PENGEND
B. DESKRIPSI MATERI PEMBELAJARAN ... 4
C. WAKTU ... 4
D. PRASYARAT ... 4
E. PETUNJUK PENGGUNAAN MODUL ... 5
F. TUJUAN AKHIR ... 5
G. CEK PENGUASAAN STANDAR KOMPETENSI ... 5
BAB II ... 7
KEGIATAN PEMBELAJARAN ... 7
A. RENCANA BELAJAR SISWA ... 7
B. KEGIATAN PEMBELAJARAN ... 7
1. KEGIATAN PEMBELAJARAN 1 ... 7
SISTEM PNEUMATIK ... 7
A. Tujuan Pembelajaran ... 7
DAFTAR ISI
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI... iMODUL PENGEND
1.1. Sistem pneumatik di dalam aliran ... 12
1.2. Standarisasi pneumatik circuit diagram ... 17
1.3. Simbol-simbol katup pengarah dan cara penggambarannya ... 17
1.4. Jenis-jenis penggerak katup pneumatik pada katup pengarah. ... 20
1.5. Diagram Sirkuit... 23
1.6. Penerapan sistem Pneumatik ... 26
C. Rangkuman ... 29
D. Tugas ... 30
E. Tes Formatif ... 30
F. Kunci Jawaban Tes Formatif ... 32
G. Lembar kerja ... 33
2. KEGIATAN PEMBELAJARAN 2 ... 35
ELEKTROPNEUMATIK ... 35
A. Tujuan Pembelajaran ... 35
B. Uraian Materi ... 35
2.1. Kontrol Pengendali ... 35
2.2. Limit Switch ... 40
2.3. Sensor ... 41
2.4. Relai ... 44
2.5. Katup Beroperasi dengan Pneumatik ... 47
2.6. Standarisasi Electrical Circuit Diagram ... 48
2.7. Diagram Sirkuit... 51
MODUL PENGEND
PEMROGRAMAN LOGIKA DASAR PLC ... 65
A. Tujuan ... 65
B. Uraian materi ... 65
1. Statement List (STL), ... 66
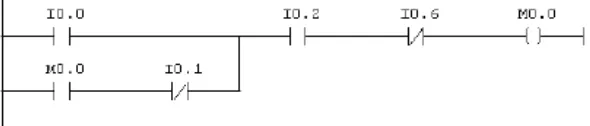
2. Ladder Diagram (LAD), ... 66
3. Function Block Diagram (FBD),... 66
4. S7-Graph atau Sequential Function Chart (SFC) ... 67
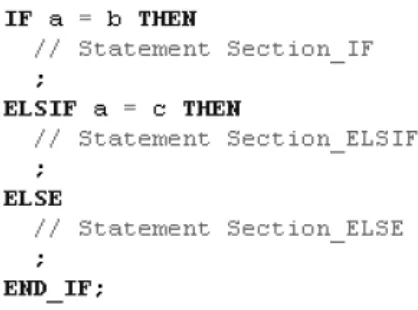
5. Structured Control Language (SCL). ... 67
6. PC Adapter MPI ... 74
MODUL PENGEND
Gambar 1 Fenomena Gaya ... 10
Gambar 2 Memperlihatkan konfigurasi dasar sistem kontrol pnumatik. ... 10
Gambar 3 Urutan pneumatik element ... 12
Gambar 4 silinder single acting dan simbolnya ... 14
Gambar 5 Control Single Acting Cylinder... 15
Gambar 6 silinder doble acting dan simbolnya ... 16
Gambar 7 Control Single(a) dan doble acting (b) ... 16
Gambar 8 Cara Menggambar dan Membaca Katup Pneumatik ... 18
Gambar 9 Penandaan dari Katup Pneumatik ... 19
Gambar 10 Penomoran katup pneumatik ... 19
Gambar 11 Katub 3/2 dengan Aktuasi Tombol Tekan, Normally Closed ... 20
Gambar 12 Katub 3/2 dengan aktuasi Tombol Tekan, Normally Open ... 20
Gambar 13 Katub 3/2 dengan aktuasi Sakelar Seleksi... 20
Gambar 14 Katub 3/2 dengan aktuasi Sakelar Limit roller, Normally Closed ... 21
Gambar 15 Contoh Katup Pneumatik secara Operasional ... 23
Gambar 16 Contoh sistem penandaan ... 25
Gambar 17 Sirkuit Pneumatik pengendalian langsung ... 27
Gambar 18 Sirkuit Pneumatik pengendalian tidak langsung ... 27
Gambar 19 Soal aplikasi pneumatik ... 28
Gambar 20 Kontak sakelar dengan konfigurasi NC ... 36
Gambar 21 macam macam kontak ... 37
Gambar 22 Konfigurasi N/C ... 37
Gambar 23 konfigurasi N/O dan N/C ... 38
Gambar 24 Jenis Saklar ... 38
Gambar 25 Macam macam saklar ... 40
Gambar 26 Kontak limit switch ... 40
Gambar 27 konstruksi relai ... 41
Gambar 28 macam – macam sensor... 42
MODUL PENGEND
Gambar 31 skema sensor dengan reflektor ... 44
Gambar 32 konstruksi relai ... 45
Gambar 33 identis relai ... 46
Gambar 34 relai tunda waktu hidup ... 47
Gambar 35 Relai tunda waktu mati ... 47
Gambar 36 Katup dengan Pilot Solenoid ... 48
Gambar 37 Simbol-simbol grafik untuk kontak: fungi dasar dan aktuasi tertunda ... 49
Gambar 38 Simbol grafis untuk alat-alat yang dioperasikan manual ... 50
Gambar 39 Simbol – simbol grafis penggerak elektromekanik ... 50
Gambar 40 Simbol Grafis untuk relai dan kontaktor ... 50
Gambar 41 Simbol-simbol grafis untuk sensor ... 51
Gambar 42 Susunan rangkaian Pneumatik ... 52
Gambar 43 Susunan rangkaian elektrik ... 52
Gambar 44 Switch NO dalam keadaan tersambung ... 53
Gambar 45 Positional diagram ... 54
Gambar 46 Diagram step pemindahan ... 55
Gambar 47 Diagram Rangkaian Pneumatik dan Diagram Rangkaian Elektrik ... 55
Gambar 48 Rangkaian yang mendeteksi akhir langkah maju dan langkah mundur. ... 56
Gambar 49 Sket Posisi ... 57
Gambar 50 Displacement step diagram ... 57
Gambar 51 Diagram RANGKAIAN elektropneumatik dengan urutan gerak : A+, B+, A-, ... 58
Gambar 52 Contoh Bahasa Pemrograman LAD ... 66
Gambar 53 Contoh Bahasa Pemrograman FBD ... 67
Gambar 54 Contoh Bahasa Pemrograman S7- Graph ... 67
Gambar 55 Contoh Bahasa Pemrograman SCL ... 68
Gambar 56 Modul PS-307-2A ... 69
Gambar 57 Modul CPU 313-1AD01-0AB0 ... 70
Gambar 58. Blok Diagram Modul I/O SM 323 DI8/DO8x24 VDC ... 72
Gambar 59 Antarmuka Masukan ... 73
Gambar 60 Antarmuka Keluaran ... 73
Gambar 61 Prosedur penggunaan Siemens Step 7 ... 74
MODUL PENGEND
Gambar 63 Tampilan New Project Wizard ... 75
Gambar 64 Tampilan pemilihan hardware PLC ... 76
Gambar 65 Tampilan pemilihan block program ... 76
Gambar 66 Tampilan nama project ... 77
Gambar 67 Tampilan project Step 7 ... 77
Gambar 68 Halaman untuk menulis program “ Ladder” ... 78
Gambar 69. icon “Symbol” ... 78
Gambar 70. Tampilan Symbol Editor ... 79
Gambar 71 Deklarasi alamat input dan output ... 79
Gambar 72. Memilih bahasa Ladder ... 79
Gambar 73 Kontak normally open ... 80
Gambar 74. Simbol Coil... 80
Gambar 75. Program ladder logika AND ... 80
Gambar 76. Ladder 1 NO dan 1 coil... 80
Gambar 77. Parallel ladder branch ... 80
Gambar 78. Parallel ladder close branch ... 81
Gambar 79. Parallel ladder... 81
Gambar 80. Simbol S-ODT ... 81
Gambar 81. Pemrograman Timer On Delay ... 82
Gambar 82. Symbol S-OffDT ... 83
Gambar 83. Pemrograman Timer Off Delay ... 83
Gambar 84. Simbol Counter UP “ S-CU) ... 84
Gambar 85. Counter up ... 84
Gambar 86. Simbol Counter Down ... 85
Gambar 87. Program Counter Down ... 86
Gambar 88. Rangkaian pengunci dengan dominan set ... 87
Gambar 89. Rangkaian pengunci dominan reset ... 87
Gambar 90. Rangkaian memori dengan katup solenoid ganda ... 87
Gambar 91. Langkah untuk memanggil fungsi set reset ... 88
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
Gambar 96. Set Komunikasi PLC ... 90
Gambar 97. Set PC Adapter ... 91
Gambar 98. Properti PC Adapter ... 91
Gambar 99. Menu Download ... 92
Gambar 100. Icon Simulasi ... 92
Gambar 101. Icon monitor ... 93
Gambar 102. PLCSIM mode RUN ... 93
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
P U U UL
L
Tabel 1 Jenis komponen Pneumatik ... 13
Tabel 2 Tanda-tanda dan Penomoran pada Lubang-lubang Katup Pneumatik ... 19
Tabel 3 : Symbol jenis pengaktian... 21
Tabel 4. Tampilan LED Status dan Kesalahan CPU-313-1AD01-0AB0... 71
Tabel 5. Mode Selector Switch CPU-313-1AD01-0AB0 ... 71
Tabel 6. Parameter S-ODT ... 82
Tabel 7. Parameter S-OffDT ... 83
Tabel 8. Parameter Counter UP ... 84
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
P U U UL
Struktur kurikulum bidang keahlian Teknologi dan Rekayasa program keahlian Teknik
Elektronika paket keahlian Teknik Mekatronika.
C3 :
Teknik Mekatronika
CAE
Teknologi
Mekanik
Mekanika
dan Elemen
mesin
Teknik
Kontrol
Pneumatik
dan Hidrolik
Robotik
Teknik
Pengendali
Daya
PETA KEDUDUKAN MODUL
MODUL PENGEND
Actuator Suatu alat yang dapat merubah besaran/kuantitas listrik
menjadi kuantitas fisik seperti contohnya : motor, solenoid,
lampu, katup, dsb
Akumulator - Salah satu jenis register data. Pada umumnya, meskipun pemrogram tidak perlu sadar karena CPU PLC
menggunakan akumulator berdasarkan preferensi,
namun ia harus sadar dengan perintah tertentu
- Jika terdapat 2 buah akumulator, A0 dan A1, dan data yang terprogram 16 bit, maka data akan masuk ke A0,
dan jika data yang terprogram adalah 32 bit, kata paling
bawah akan masuk ke A0 dan kata paling atas akan
masuk ke A1
- Ketika perintah yang menggunakan akumulator
dijalankan beberapa kali dalam program, jika data
tersebut berturut-turut tidak terkirim ke register data,
maka akumulator akan menulis ulang secara
preferensial menggunakan CPU PLC. Untuk itu pada
saat akan melaksanakan perintah selanjutnya harus
berhati-hati supaya tidak terlanjur tertulis ulang.
Address - Alamat di memori. Memori memiliki alamat, dan menulis
serta membaca data dilakukan dengan menunjuk
alamat tersebut
- Nilai numerik untuk menunjukkan posisi target pada saat pemosisian. Satuan diatur dalam mm, inci, sudut,
atau jumlah pulsa
lgoritma Prosedur pemrosesan untuk mencapai tujuan tertentu dari
pemakaian komputer. Sesuatu yang menguraikan algoritma
secara nyata menggunakan bahasa pemrograman disebut
MODUL PENGEND
ditangani dengan angka (nilai digital), misalnya waktu, suhu,
tekanan, voltase, arus, jumlah aliran, dan sebagainya. Karena
nilai analog tidak ditangani secara langsung di CPU PLC,
maka pengoperasian dilakukan dengan mengkonversi ke
nilai digital. Hal ini disebut dengan konversi A/D
Assembler Software program komputer yang mengubah bahasa
pemrograman assembly kedalam bahasa mesin (machine
code)
Batch Jumlah yang diproses dalam sekali operasi dalam proses
(yaitu proses batch) yang tidak dapat dihentikan di tengah
jalan setelah material dimasukan. Seperti proses penguatan
(annealing) dan polimerisasi
Bit Singkatan dari binary digit. 1bit adalah satuan minimum
informasi untuk menampilkan dua kondisi, 0 (OFF) dan 1
(ON). Kontak dan koil adalah 1 bit, sehingga disebut perangkat bit
lok ungsi S Sebuah FB dirancang untuk mengkonversi blok sirkuit, yang
digunakan berulang kali dalam urutan program, menjadi
komponen yang akan digunakan dalam program sekuens
yte Satuan jumlah informasi. 1 byte setara dengan 8 bit.
Changer Bagian dari stasiun distribusi yang berfungsi untuk
memindahkan benda kerja dari tempat magazine ke stasiun
lainnya
CPU Bagian sub-sistem yang bertugas mengontrol dan
mensupervisi semua operasi PLC. Sebuah komunikasi internal
atau “Bus System” membawa informasi dari dan ke CPU, I/O,
dan memori database
asis ata
Sekumpulan data yang dimiliki bersama oleh beberapa
aplikasi perangkat lunak atau pengguna. Ada kalanya
pengertian ini mencakup juga sistem manajemennya. L S U
k
,
MODUL PENGEND
P Electrically Erasable Programmable Read Only Memory
(EEPROM, E2ROM), Salah satu jenis memori hanya baca.
Penulisan dapat dilakukan dengan menggunakan tegangan.
Memori tidak akan terhapus meskipun listrik padam. Bentuk luarnya sama dengan IC-RAM
High Level
Language
Bahasa pemrograman yang mudah dipahami dan digunakan
oleh pemakai. Adapun bentuknya berupa kata-kata atau
grup kata-kata dan atau berupa gambar diagram, yang pada
umumnya ditulis dalam bahasa inggris dan selanjutnya
perintah (kata-kata atau gambar diagram) ini diubah kedalam
bahasa mesin, yang menjadikan perintah ini dapat dieksekusi oleh CPU
Interlock persyaratan untuk mengeblok operasi mesin yang sedang
berjalan agar tidak berpindah ke operasi berikutnya hingga
operasi yang sedang berjalan selesai, Interlock digunakan
untuk mencegah mesin rusak
Operasi untuk menggerakkan benda kerja ke posisi yang
diinginkan menggunakan sinyal dari eksternal, Pada modul
pemosisian, pengoperasian JOG dapat dilakukan dengan
memasukkan parameter dan kecepatan JOG. Akan tetapi,
pada kondisi ON dalam jangka waktu lama, JOG akan
melampaui batas langkah (nilai batas atas atau nilai batas
bawah), dan akan berhenti
Modul input analog Mengubah sinyal analog ke dalam bentuk sinyal digital,
dengan cara mengisolasi sinyal input analog yang dari luar
prosesor dan mengubahnya kedalam bentuk sinyal digital
dengan level yang sesuai, sehingga perubahan sinyal
kompatibel dengan bus data PLC
MODUL PENGEND
emori program Memori yang menyimpan program dan parameter yang
diperlukan dalam pengolahan modul CPU
Monitor online Membaca dan memonitor status pengoperasian serta konten
perangkat pada CPU PLC yang sedang beroperasi dengan
menghubungkan CPU PLC dan perangkat periferi
Modular Production
System ( MPS)
sebuah unit stasiun yang terdiri dari beberapa actuator seperti
silinder, motor atau suction cup yang dibangkitkan oleh
vacuum generator, lengkap dengan komponen kontrolnya seperti tombol tekan, sensorsensor dan kontrolernya
Pemrograman
Offline
menulis dan menyimpan program di dalam komputer tanpa
komputer (programming terminal) dihubungkan ke PLC
Pemrograman
Online
Membuat program atau memasukan logika ladder dalam alat
pemrogram (programming terminal) terhubung dengan PLC
Tranduser Suatu alat yang dapat merubah kuantitas fisik menjadi
sinyal listrik. Beberapa contoh dari tranducer diantaranya
dapat berupa : tombol tekan, sakelar batas, termostat,
straingages, dsb. Transducer ini mengirimkan informasi
mengenai kuantitas yang diukur. Unit pelayanan
udara
Peralatan pneumatic yang terdiri dari filter, pengatur tekanan,
dan pelumas
Vakum udara yang mempunyai tekanan di bawah atmosfir P
MODUL PENGEND
Berikut ini adalah standar kompetensi siswa paket keahlian Teknik Mekatronika pada mata pelajaran Elektropneumatik dan Robotika.
Kompetensi Inti 1 dan 2 memuat Tentang :
KI 1. Menghayati dan mengamalkan ajaran agama yang dianutnya
KI 2. Menghayati dan mengamalkan perilaku jujur, disiplin, tanggung jawab, peduli (gotong royong, kerjasama, toleran, damai), santun, responsif dan proaktif dan menunjukkan sikap sebagai bagian dari solusi atas berbagai permasalahan dalam berinteraksi secara efektif dengan lingkungan sosial dan alam serta dalam menempatkan diri sebagai cerminan bangsa dalam pergaulan dunia
Sedangakan KI 3 dan KI 4 untuk pengetahuan dan ketrampilan dijabarkan beserta Kompetensi Dasarnya seperti di bawah ini:
/SQTIXIRWM-RXM /SQTIXIRWM(EWEV
KI 3. Memahami, menerapkan menganalisis dan mengevaluasi pengetahuan faktual, konseptual, prosedural dan metakognitif dalam ilmu pengetahuan, teknologi, seni, budaya, dan humaniora dengan wawasan kemanusiaan, kebangsaan, kenegaraan, dan peradaban terkait penyebab fenomena dan kejadian dalam bidang kerja yang spesifik untuk memecahkan
3.1 Memahami beberapa macam robot yang diam ditempat dan robot yang berjalan serta konstruksinya
3.2 Menjelaskan komponen-komponen utama pada robot
3.3 Membaca data teknik komponen-komponen utama pada robot
3.4 Memahami diagram rangkaian robot 3.5 Menjelaskan proses komisioning pada
robot
MODUL PENGEND
Berikut ini adalah standar kompetensi siswa paket keahlian Teknik Mekatronika pada mata pelajaran Elektropneumatik dan Robotika.
Kompetensi Inti 1 dan 2 memuat Tentang :
KI 1. Menghayati dan mengamalkan ajaran agama yang dianutnya
KI 2. Menghayati dan mengamalkan perilaku jujur, disiplin, tanggung jawab, peduli (gotong royong, kerjasama, toleran, damai), santun, responsif dan proaktif dan menunjukkan sikap sebagai bagian dari solusi atas berbagai permasalahan dalam berinteraksi secara efektif dengan lingkungan sosial dan alam serta dalam menempatkan diri sebagai cerminan bangsa dalam pergaulan dunia
Sedangakan KI 3 dan KI 4 untuk pengetahuan dan ketrampilan dijabarkan beserta Kompetensi Dasarnya seperti di bawah ini:
/SQTIXIRWM-RXM /SQTIXIRWM(EWEV
KI 3. Memahami, menerapkan menganalisis dan mengevaluasi pengetahuan faktual, konseptual, prosedural dan metakognitif dalam ilmu pengetahuan, teknologi, seni, budaya, dan humaniora dengan wawasan kemanusiaan, kebangsaan, kenegaraan, dan peradaban terkait penyebab fenomena dan kejadian dalam bidang kerja yang spesifik untuk memecahkan masalah
3.1 Memahami beberapa macam robot yang diam ditempat dan robot yang berjalan serta konstruksinya
3.2 Menjelaskan komponen-komponen utama pada robot
3.3 Membaca data teknik komponen-komponen utama pada robot
3.4 Memahami diagram rangkaian robot 3.5 Menjelaskan proses komisioning pada
robot
3.6 Menjelaskan peralatan kerja dan robot yang akan dijalankan
MODUL PENGEND
ompetensi nti ompetensi asar
/SQTIXIRWM-RXM /SQTIXIRWM(EWEV
3.7 Menyebutkan macam-macam pemeriksaan yang dilakukan sebelum menjalankan robot
3.8 Memahami urutan pengoperasian suatu robot
3.9 Menjelaskan peralatan kerja dan komponen yang digunakan
3.10Memahami cara pemasangan komponen-komponen sesuai manual instuksinya
3.11Memahami cara penggantian komponen yang rusak pada robot dengan menggunakan peralatan kerja yang sesuai
3.12Memilih software kontrol yang sesuai dengan program robot
3.13Memahami bahasa pemrograman yang digunakan
3.14Memahami langkah-langkah pemindahan program dari komputer/ peralatan pemrograman ke robot 3.15Memahami cara pengujian program
pada robot
KI 4. Mengolah, menalar, menyaji dan mencipta dalam ranah konkret dan ranah abstrak terkait dengan pengembangan dari yang dipelajarinya di sekolah secara mandiri,dan mampu
4.1 Menunjukkan beberapa macam robot dan bagian-bagiannya
4.2 Melakukan pemeriksaan fungsi komponen-komponen yang digunakan pada robot
MODUL PENGEND
ompetensi nti ompetensi asar
melaksanakan tugas spesifik di
bawah pengawasan langsung
4.3 Memilih komponen-komponen yang
layak untuk digunakan pada robot
4.4 Membaca dan menggambar diagram
rangkaian robot.
4.5 Melakukan komisioning pada robot
4.6 Menyiapkan peralatan kerja dan robot
yang akan dioperasikan
4.7 Melakukan monitoring terhadap
komponen mesin, sambungan kabel,
alamat I/O kendali elektronik dan
pasangan mekanik
4.8 Menjalankan mesin sesuai prosedur dan
melakukan tindakan pengamanan jika
terjadi kegagalan operasi
4.9 Menggunakan peralatan kerja untuk
memasang komponen-komponen pada
robot
4.10Memasang komponen sesuai prosedur
dan mengujinya setelah selesai
4.11 Melakukan penggantian komponen yang
rusak sesuai prosedur dengan
menggunakan peralatan kerja yang
sesuai
4.12Menyiapkan peralatan-peralatan yang
digunakan
4.13 Menulis program di Personal Computer
(PC)/laptop/peralatan pemrograman
4.14Memindah program dari PC ke peralatan
kontrol elektronik
4.15 Menguji robot dengan peralatan kontrol
MODUL PENGEND
Kemajuan ilmu pengetahuan dan teknologi dari masa ke masa berkembang cepat
terutama dibidang mekatronika. Perkembangan ini tampak jelas di industri, dimana
sebelumnya banyak pekerjaan menggunakan tangan manusia, kemudian beralih
menggunakan mesin, berikutnya dengan electro-mechanic (semi otomatis) dan
sekarang sudah menggunakan robotic (full automatic) seperti penggunaan Flexible
Manufacturing Sistems (FMS) dan Computerized Integrated Manufacture (CIM) dan sebagainya.
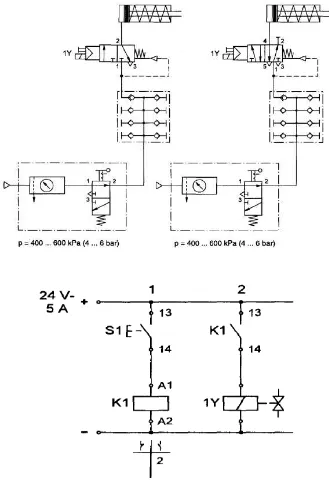
Kendali elektropneumatik berbasis PLC merupakan peralatan atau komponen yang
mempunyai peranan penting dalam sebuah sistem pengaturan otomatis. Ketepatan
dan kesesuaian dalam memilih dan membuat program pada PLC akan sangat
menentukan kinerja dari sistem pengaturan secara otomatis.
Pada buku siswa ini baru dibahas tentang prinsip kerja rangkaian elektropneumatik,
plc dan kendali elektropneumatik berbasis plc, dimana pembahasan buku mencakup
dari symbol, karakteristik hingga aplikasi. Dengan mempelajari kendali
elektropneumatik diharapkan siswa dapat memahami dan menjelaskan cara kerja
suatu mesin sesuai fungsinya sebagai pengontrol atau otak dari suatu mesin yg
otomatis pada industri dan sebagainya.
C. U
Alokasi waktu untuk mempelajari modul ini di petakan menjadi berikut :
Kegiatan Belajar 1 : sistem pneumatik 12 jam pelajaran
Kegiatan Belajar 2 : Elektropneumatik 12 jam pelajaran
Kegiatan Belajar 3 : PLC (Programable Logic Control) 24 jam pelajaran
Total waktu yang dibutuhkan adalah 48 jam pelajaran
. P S
MODUL PENGEND
Modul ini disusun dengan memberikan penjelasan tentang konsep pengerjaan di
dunia usaha dan dunia industri ( DUDI ) seperti pneumatik, elektropneumatik atau
peralatan otomatis lainnya dengan beberapa symbol, karakteristik dan contoh
aplikasi sederhana yang berkaitan dengan dunia teknik pada umumnya dan
mekatronika pada khususnya. Untuk memungkinkan siswa belajar sendiri secara
tuntas , maka perlu diketahui bahwa isi buku ini pada setiap kegiatan belajar
umumnya terdiri atas, uraian materi, contoh-contoh aplikasi, tugas dan tes formatif
serta lembar kerja, sehingga diharapkan siswa dapat belajar mandiri (individual
learning) dan mastery learning (belajar tuntas) dapat tercapai.
. U U H
Tujuan akhir yang hendak dicapai adalah agar siswa mampu:
Mengenal jenis dan simbol dari macam -macam komponen pada
Pneumatik, elektropneumatik dan plc .
Menjelaskan fungsi.macam - macam komponen pada pneumatik,
elektropneumatik dan plc .
Memahami konsep cara kerja .macam - macam komponen pada
Pneumatik, elektropneumatik dan plc .
Mampu membuat rangkaian aplikasi sederhana yang menggunakan
aplikasi FluidSim dan Siemens S7-300.
Mampu melakukan commisioning pada sistem kendali PLC secara
keseluruhan.
. C P U S S P S
1. Apakah yang dimaksud dengan sistem pneumatik?
2. Sebutkan macam – macam komponen pneumatik!
3. Apakah yang dimaksud dengan sistem elektropneumatik?
4. Apakah yang dimaksud dengan PLC?
5. Sebutkan macam- macam komponen elektropneumatik!
. S PS P L
C. U
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
6. Apakah yang dimaksud dengan solenoid valve?
7. Relai, single silinder, double silinder dan timer. Manakah diantara komponen
tersebut yang termasuk aktuator?
MODUL PENGEND
Kegiatan belajar siswa menggunakan modul ini di buat 3 kegiatan dengan rincian
sebagai berikut :
1. Memahami dan mengimplementasikan sistem pneumatik selama 12 jam
pelajaran.
2. Memahami dan mengimplementasikan sistem Elektropneumatik selama 12
jam pelajaran.
3. Memahami dan mengimplementasikan sistem pneumatik menggunakan
Kontrol PLC (di modul ini menggunakan Siemens S7-300) selama 24 jam
pelajaran.
. P L
. P L
S S P U
. u uan Pembela aran
1. Peserta didik dapat mengidentifikasi kontrol pneumatik
2. Peserta didik dapat mengenal simbol pneumatik pada sistem pneumatik
3. Peserta didik dapat membaca dan membuat diagram kontrol pneumatik.
4. Peserta didik dapat membuat rancangan sederhana sistem kontrol
pneumatik.
. Uraian ateri
Dewasa ini, evolusi teknologi kontrol telah mencapai satu titik di mana hampir semua
proses dan manufaktur di industri merupakan kombinasi dari aplikasi berbagai
subsistem seperti pneumatiks, mechanics, electrics, computer, control dan
information technology. Disain mesin-mesin dan peralatan produksi modern dapat
dikatakan sebagai suatu mechanical construction dengan menggunakan
pneumatiks/hydraulic/electric actuator & motor sebagai penggeraknya dan PLC
sebagai main controller–nya. Didukung dengan berbagai komponen lain yang
MODUL PENGEND
berfungsi sebagai internal interfacedan operator interface. Misalnya solenoid, switch,
sensor, relai, encoder untuk internal interface, dan push button, thumb switch,
potensiometer untuk operator interface. Penggerak dari sistem otomasi tersebut
adalah fluida.
Fluida merupakan substansi yang dapat mengubah bentuk (mengikis) secara terus
menerus seperti yang terjadi pada aplikasi shear stress, atau pada fenomena alam
lainnya. Fluida dapat berbetuk gas dan cair. Teknik atau cara penggunaan fluida cair
pada aplikasi power transmission lazim disebut hydraulic sistem, sedang sistem
lain yang menggunakan fluida gas untuk aplikasi power transmission disebut sistem
pnumatik. Pada sistem hidrolik digunakan oli mineral sebagai fluida kerjanya,
sedang pada sistem pnumatikdigunakan udara atmosfir.
Mekanisasi dan otomatisasi dalam bidang proses dan manufaktur di industri
menjadikan pneumatik automation menjadi pilar utama dalam banyak industri,
misalnya untuk keperluan material handling, packaging, bottling, distributing, &
sorting sistem. Otomasi dengan pnumatikditerapkan di berbagai industri, misalnya
industri makanan & minuman, farmasi, logam, pertambangan dan petrokimia.
Kemajuan teknologi di bidang otomatisasi dengan pnumatik tersebut menuntut
tersedianya engineering and maintenance personal yang memiliki pengetahuan dan
pengalaman praktis di bidang mechanical, electrical, electronic and
compressed air/fluid power technologies. Penggunaan control pnumatik dan aktuasi
menjadi semakin luas. Salah satu alasannya adalah, dari sekian banyak masalah
otomasi industri, tidak ada medium yang lebih mudah didapat dan lebih ekonomis.
Disamping memiliki karakteristik positif sistem kontrol pnumatik juga memiliki
karakteristik negatif. Berikut ini diberikan beberapa karakteriistik positif dari
udara untuk pneumatiks automation:
Quantity : Tersedia di mana saja dan tak terbatas
Transportation : Mudah disalurkan melalui pipa
MODUL PENGEND
Cleanliness : Udara tekan sangat bersih tidak menimbulkan
polusi
Construction : Konstruksi komponen pnumatik relatif sederhana.
Speed : Udara tekan merupakan working medium yang
mempunyai respon cepat [1-2 m/s]
Agar diperoleh garis demarkasi yang tegas dalam aplikasi otomasi dengan
pnumatik, berikut ini diberikan karakteristik negatif dari sistem pnumatik, yaitu:
Preparation : Udara tekan yang digunakan sebagai fluida kerja pada
sistem kontrol pnumatik harus memenuhi persyaratan
teknis dan perlu dipersiapkan dengan presisi, dan
memerlukan peralatan yang harganya realtif mahal.
Udara tekan harus bebas dari debu dan uap air (moisture),
karena dapat merusak komponen pneumatik
Force : Udara tekan mencapai titik ekonomisnya pada tekanan
700 kPa atau 7 bar dengan daya tekan sebesar 20.000 –
30.000 N.
Exhaust air : Exhaust air sangat bising, sehingga memerlukan
material yang dapat menyerap suara
Cost : Udara kempa merupakan medium yang relatif mahal
Hukum-hukum alam yang mendasari penerapan fluid sistem untuk membangun
mekanisasi dan manipulasi gerak adalah hukum. Hukum Pascal diaplikasikan pada
sistem fluid power transmission. Hukum fisika lainnya yang digunakan untuk
keperluan analisis, desain dan manufaktur pada sistem fluida adalah HukumBoyle,
Mariotte, Gay Lussac dan Charles.
Ada beberapa fenomena alamiah mengenai penggunaan energi di sekitar kita dimana
dengan tenaga input yang kecil dapat menghasilkan tenaga Output yang jauh lebih
besar. Diskusikan & Jelaskan secara konsep berdasarkan gambar berikut!. Hukum
apa yang mendasarinya?
Kata kunci:
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar enomena aya
Sistem Pnumatik dalam industri manufaktur merupakan muara dari semua proses
mekanik atau manipulasi gerakan yang menggunakan tenaga udara kempa. Dalam
sistem pnumatik udara kempa akan memindahkan suatu gaya atau gerakan. Sistem
pnumatik meliputi semua komponen mesin atau peralatan, yang beroperasi secara
pneumatik atau menggunakan proses-proses pneumatik. Udara bertekanan dalam
peranannya sebagai unsur penggerak merupakan bagian utama yang harus
mendapatkan perhatian lebih banyak.
Sistem pnumatik menggunakan udara bertekanan untuk menghasilkan gerakan
mekanik. Sistem dasar kendali pnumatik meliputi piranti penyedia sumber energi
udara kempa yang terdiri dari kompresor udara, sistem filter udara, sistem pengering
udara, dan sistem pengatur tekanan udara. Kemudian elemen input untuk
mengendalikan sistem, berupa katub tombol tekan (pushbutton valve) dan katub
sensor. Selanjutnya berbagai jenis katub pengarah dan pengatur tekanan udara, dan
MODUL PENGEND
Sistem tersebut mencakup aircompressor, menghasilkan udara kempa secara
kontinyu, intakefilter berfungsi menahan kotoran udara sebelum masuk ke sistem,
dryer berfungsi menyerap uap air di udara (moisture), receiver tank sebagai
reservoar udara kempa, pressure regulator mengatur dan menjaga tekanan udara
tetap konstan, valve mengontrol aliran udara kempa, dan pneumatik cylinder sebagai
aktuator yang mengubah energi udara menjadi energi mekanik.
Sistem pnumatik meliputi semua komponen mesin atau peralatan, yang beroperasi
secara pneumatik atau menggunakan proses-proses pneumatik. Udara bertekanan
dalam peranannya sebagai unsur penggerak merupakan bagian utama yang harus
mendapatkan perhatian lebih banyak.
Pnumatik sistem menggunakan udara bertekanan untuk menghasilkan gerakan
mekanik. Sistem dasar kendali pnumatik meliputi piranti penyedia sumber energi
udara kempa yang terdiri dari kompresor udara, sistem filter udara, sistem pengering
udara, dan sistem pengatur telkanan udara. Kemudian eleven masukan untuk
mengendalikan sistem, berupa push button valve dan sensor valve.
Selanjutnya berbagai jenis katub pengarah dan pengatur tekanan udara, dan yang
terakhir berupa aktuator. Diagram rangkaian harus digambar dengan tata cara
penggambaran yang benar. Karena hal ini akan memudahkan seseorang untuk
membaca rangkaian, sehingga mempermudah pada saat merangkai atau mencari
kesalahan sistem pneumatik.
Tata letak komponen diagram rangkaian harus disesuaikan dengan diagram alir dari
mata rantai kontrol yaitu sebuah sinyal harus mulai mengalir dari bawah menuju ke
atas dari gambar rangkaian. : . ambar enomena aya
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
abel enis komponen Pneumatik
. .Sistem pneumatik di dalam aliran
ambar Urutan pneumatik element
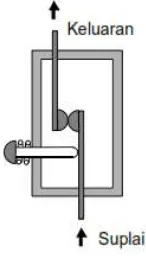
Pada sistem pneumatik terdiri dari bagian bagian yang harus ada yaitu Energi
supplai, Final control elements dan actuator. Sedangkan untuk prosessing element
ini tergantung dari kebutuhan dan pada input element ini nanti yang akan dititik
beratkan pada macam macam kendali yang dibahas pada modul ini, diantaranya
adalah control input dengan push button , pilot solenoid ( elektropneumatik) dan
control terpogram dengan PLC.
Pada bahasan modul ini akan di awali dengan katup (valve) dan silinder. Untuk
MODUL PENGEND
abel enis komponen Pneumatik
Nama
Komponen Keterangan
Simbol
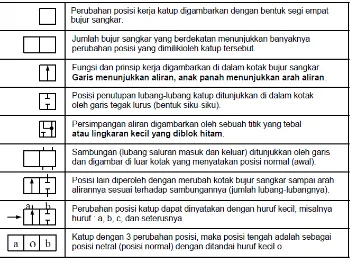
Katup 2/2 Mempunyai 2 lubang ( masukan dan keluaran )
dan 2 posisi hubungan katup
1(P) 2(A)
Lubang keluaran tertutup. Pada posisi normal
tertutup , tidak aliran yang keluar (konfigurasi
NC.)
Pada posisi normal terbuka, ada aliran keluar (
konfigurasi NO )
1(P) 2(A)
Katup 3/2 Mempunyai 3 lubang ( masukan , keluaran dan
pembuangan ) dan 2 posisi hubungan katup
2(A)
3(R) 1(P)
Pada posisi normal, tidak ada aliran udara yang
keluar ( konfigurasi NC ).
Pada posisi normal , ada aliran udara yang
keluar ( konfigurasi NO ).
2(A)
3(R) 1(P)
Katup 4/2 Mempunyai 4 lubang ( masukan , keluaran dan
1 pembuangan ) dan 2 posisi hubungan katup
.
2(B)
3(R) 1(P) 4(A)
Katup 5/2 Mempunyai 5 lubang.( masukan , keluaran dan
2 pembuangan ) dan 2 posisi hubungan katup.
1(P) 2(B)
3(S) 4(A)
5(R)
. . Sistem pneumatik di dalam aliran
MODUL PENGEND
Katup 3/3 Mempunyai 3 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup.
Pada posisi normal ( tengah ) tertutup
2(A)
3(R) 1(P)
Katup 4/3 Mempunyai 4 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup
Pada posisi normal ( tengah ) lubang keluaran
sambung dengan pembuangan.
1(P) 3(R) 4(A) 2(B)
Katup 5/3 Mempunyai 5 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup
Pada posisi normal ( tengah ) tertutup 1(P)
3(S) 5(R) 4(A) 2(B)
Jenis jenis silinder
Silinder dibagi menjadi 2, yaitu silinder single acting dan silinder doble acting
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
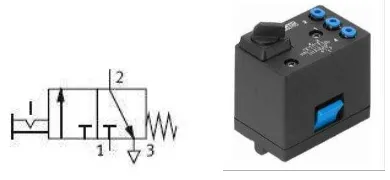
Cara kerja silinder ini selalu digerakkan dengan valve 3/2 sebagai pemberi input
signal dan juga sebagai exhause saat retrac atau kembali dengan menggunakan
spring / pegas.
(a) (b)
ambar Control Single cting Cylinder
Batang piston silinder kerja tunggal bergerak keluar pada saat silinder menerima
udara bertekanan. Jika udara bertekanan dihilangkan, secara otomatis piston
kembali lagi ke posisi awal.
Posisi Awal
Posisi awal (gambar 2.7a) didefinisikan sebagai posisi normal dari sistem. Semua
bagian terhubung dan tombol tidak ditekan oleh operator. Udara bertekanan
dari catu daya ditutup, piston masuk ke dalam oleh dorongan pegas kembali. Lubang
masukan silinder dihubungkan ke lubang pembuangan melalui katup. Pengiriman
bertekanan diputus oleh katup.
Tombol ditekan
Menekan tombol tekan berarti memindahkan posisi katup 3/2, melawan pegas katup.
Diagram (gambar 2.7b) menunjukkan katup teraktifkan pada posisi kerja. Udara
bertekanan dari catu daya melalui katup masuk ke lubang masukan silinder kerja
tunggal. Udara bertekanan yang terkumpul menyebabkan batang piston bergerak
keluar melawan gaya pegas kembali. Setelah piston sampai pada posisi akhir langkah
maju, maka tekanan udara di dalam tabung silinder meningkat mencapai harga
maksimum.
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
Segera setelah tombol dilepas, maka pegas di katup mengembalikan katup ke posisi
awal dan batang piston silinder kembali masuk. Jika tombol tekan diaktifkan lau
dilepas sebelum silinder keluar penuh, piston masuk kembali secara langsung, maka
ada hubungan langsung antara pengoperasian tombol tekan dan posisi silinder.
Hal ini memungkinkan silinder bisa keluar tanpa mencapai akhir langkah.
Silinder doble acting
ambar silinder doble acting dan simbolnya
Cara kerja silinder ini selalu digerakkan dengan valve 5/2 atau silinder 4/2 (bisaanya
di sistem Hidrolik) karena mempunyai dua jalur output sebagai pemberi input signal
dan sebagai exhause saat retrac atau kembali dengan masukkan yang lain.
(a) (b)
MODUL PENGEND
pada sisi batang piston silinder, sedangkan udara pada sisi piston silinder dibuang
melalui saluran buang katup.
Tombol ditekan
Menekan tombol berarti memindahkan posisi katup 4/2 melawan gaya pegas
pengembali. Diagram rangkaian (gambar 2.10b) menunjukkan katup aktif pada posisi
kerja. Pada posisi ini suplai udara bertekanan dialirkan ke sisi piston silinder dan
udara pada sisi batang piston dibuang keluar lewat katup. Tekanan pada sisi piston
mendorong keluar batang piston. Pada saat langlah keluar penuh dicapai, tekanan
pada sisi piston mencapai maksimum.
Tombol dilepas
Tombol tekan dilepas, pegas pengembali katup menekan katup kembali ke posisi
semula. Sekarang suplai udara bertekanan dialirkan ke sisi batang piston dan udara
pada sisi piston dibuang keluar melalui katup, sehingga batang piston silinder kerja
ganda masuk kembali.
. .Standarisasi pneumatik circuit diagram
Diagram sistem pneumatik dari suatu sistem kontrol dihubungkan satu sama lain dan
bagaimana mereka berinteraksi. Simbol-simbol grafis yang merupakan
komponen-komponen akan diatur sedemikian rupa untuk memperoleh suatu diagram rangkaian
yang jelas,dimana terdapat suatu persimpangan saluran-saluran sekecil mungkin.
Suatu diagram rangkaian pneumatik oleh sebab itu,tidak mengungkapkan susunan
ruang . Dalam suatu diagram rangkaian pneumatik komponen-komponen
dipresentasikan oleh simbol-simbol grafis (rangkaian) yang di standarisasi sesuai
dengan DIN/ISO 1219.1 Simbol grafis menjelaskan karakteristik dari tiap komponen
meliputi:
a. Jenis aktuasi
b. Jumlah pos dan tujuannya
c. Jumlah posisi saklar
. .Simbol simbol katup pengara dan cara penggambarannya
Dalam membuat diagram rangkaian (circuit diagram) pneumatik, setiap jenis katup
yang digunakan harus digambarkan secara simbul-simbul saja. Simbul-simbul ini ambar silinder doble acting dan simbolnya
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
hanya untuk menunjukkan fungsinya, bukan merupakan prinsip kerja dari konstruksi
katupnya. Untuk memahami dan cara menggambar katup, perhatikan petunjuk pada
Gambar 2. 1. Harap dibaca atau disimak secara urut mulai dari atas ke bawah.
ambar Cara enggambar dan embaca atup Pneumatik
Setiap katup dilengkapi dengan pembuangan udara yang telah dianggap selesai
melakukan tugas. Model pembuangan udara bekas itu ada dua alternatif yaitu dibuang
secara langsung dan lewat saluran penghubung. Pada umumnya juga telah dilengkapi
dengan peredam (silencer) supaya saat udara angin tidak menimbulkan kebisingan. Alat
peredam suara ini bisaanya tidak nampak dari luar secara fisik, melainkan dibuat
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar Penandaan dari atup Pneumatik
Untuk menjamin bahwa katup dipasang dengan tepat maka setiap saluran
penyambungnya diberi tanda huruf besar atau angka. Tanda-tanda itu dibuat supaya saat
membuat rangkaian diagram pneumatik menjadi lebih mudah mengkonstruksi-nya.
Tanda-tanda saluran yang umum digunakan seperti ditunjukkan pada Tabel 2.1 Tanda dan
penomoran itu telah merujuk kepada ISO-1219.
abel anda tanda dan Penomoran pada Lubang lubang atup Pneumatik
2(A)
3(R)
1(P)
1(P)2(B)
3(S) 4(A)
5(R)
Penomoran katup 3/2 Penomoran Katup 5/2
ambar Penomoran katup pneumatik
Manfaat pemberian tanda-tanda ini adalah untuk memudahkan saat pema-sangan awal
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar atub dengan aktuasi Sakelar Limit roller ormally Closed
abel Symbol enis pengaktian
enis Pengakti an ambar
rekonstruksi, perbaikan, dan sebagainya. Hal ini penting jika jum-lah katup-katup sebagai
komponen rangkaian diagram pneumatik banyak sekali.
. . enis enis penggerak katup pneumatik pada katup pengara .
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka bagi
operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga berfungsi sebagai
piranti pendeteksi (misalnya sakelar limit dan sakelar proksimiti). Gambar 2.31 sampai
gambar 2.37 memperlihatkan berbagai piranti elemen input sistem kendali pnumatik.
ambar atub dengan ktuasi ombol ekan ormally Closed
ambar atub dengan aktuasi ombol ekan ormally pen
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar atub dengan aktuasi Sakelar Limit roller ormally Closed
abel Symbol enis pengaktian
enis Pengakti an ambar
Mekanik :
Pneumatik
Listrik . . enis enis penggerak katup pneumatik pada katup pengara .
ambar atub dengan ktuasi ombol ekan ormally Closed
ambar atub dengan aktuasi ombol ekan ormally pen
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar Conto atup Pneumatik secara perasional
. . iagram Sirkuit
Penandaan lemen kontrol
enis Pengakti an ambar
Kombinasi
Selenoid ganda dan operasi
pilot (Pemandu) dengan
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar Conto atup Pneumatik secara perasional
. . iagram Sirkuit
Setelah kita mengenal simbol-simbol pneumatik maka gambar gambar rancangan
sirkuit elektropneumatik akan kita komunikasikan dengan grafik -simbol. Hal ini akan
sangat mudah untuk menggambar maupun memahaminya. Lain halnya bila kita
menggambar rangkaian dengan menggunakan gambar benda sesungguhnya kita
akan mengalami kesulitan. Berikut ini suatu contoh sirkuit pneumatik dan yang
digambar dengan gambar benda untuk dfibandingkan dengan diagram sirkuit yang
digambarkan dengan grafik simbol.
Penandaan lemen kontrol
Penandaan tiap-tiap elemen kontrol untuk mengetahui dimana lokasi elemen
tersebut berada. Ada dua macam penandaan yang telah dikenal dan sering
digunakan yaitu :
1. Penandaan dengan angka
MODUL PENGEND
ambar Conto sistem penandaan
Penandaan engan Huru 2. Penandaan dengan huruf
Penandaan Dengan Angka
Disini ada beberapa kemungkinan untuk menandai dengan angka. Dua sistem yang
sering digunakan yaitu :
1. Nomor seri, Sistem ini sebaiknya untuk kontrol yang rumit .
2. Penandaan yang disusun dari nomor grup dan nomor seri dengan grup, misalnya
4.12 artinya elemen 12 pada grup 4
Klasifikasi grup :
Grup 0 : semua elemen sumber energi ditandai dengan angka depan 0
Grup 1, 2, 3, … : penandaan dari satu mata rantai kontrol ( grup ).
Sistem untuk nomor seri :
.0 : elemen kerja
.1 : elemen kontrol
.2, .4 : semua elemen yang mempunyai pengaruh pada gerakan maju,
ditandai dengan nomor seri genap.
.3 , .5 : semua elemen yang mempunyai pengaruh pada gerakan mundur,
ditandai dengan nomor seri gasal.
.01, .02 : elemen antara elemen kontrol dan elemen kerja yaitu katup kontrol
aliran dan katup buangan-cepat.
Sistem penandaan berdasarkan pada sistem nomor grup mempunyai keuntungan
bahwa dalam praktiknya seorang perawatan dapat mengenali pengaruh dari sinyal
dari nomor pada masing-masing komponen. Sebagai contoh : jika terjadi
kegagalan pada silinder 2.0, maka dapat diasumsikan bahwa penyebabnya dapat
ditemukan pada grup 2, oleh karena itu komponenkomponen yang mempunyai tanda
angka pertama 2 harus diperiksa. Gambar berikut menunjukkan penandaan elemen
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar Conto sistem penandaan
Karena rangkaian hanya terdiri dari satu grup, maka semua elemen angka
pertama bertanda 1, artinya lokasinya berada pada grup 1. Silinder ditandai
dengan angka 1.0. Katup kontrol akhir ditanda dengan angka 1.1. Katup-katup yang
menyebabkan silinder bergerak maju ditandai dengan angka : 1.2, 1.4 dan 1.6.
Sedangkan katup yang menyebabkan silinder bergerak mundur ditandai dengan
angka 1.3. Sumber energi ditandai 0.1.
Penandaan engan Huru
Tipe ini digunakan terutama pada rangkaian yang dikembangkan secara metodik.
Untuk pemakaian yang luas, tipe ini meliputi kalkulasi dan daftar yang dapat
dilakukan lebih mudah dan lebih jelas jika menggunakan huruf. Elemen kerja
ditandai dengan huruf besar, elemen sinyal dan limit switch ditandai dengan huruf
kecil. Bertolak belakang dengan tipe terdahulu, elemen sinyal dan limit switch tidak
ditandai ke dalam kelompok grup. Lokasi tipe ini seperti diilustrasikan pada gambar
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
A, B, C… : tanda dari elemen-elemen kerja
ao, bo, co… : tanda dari limit switch yang digerakkan pada posisi belakang
silinder A, B,C ….
a1, b2, c3… : tanda dari limit switch yang digerakkan pada posisi batang
piston ke depan dari silinder A, B,C ….
Keuntungan dari tipe ini adalah dapat dengan segera diketahui komponen sinyal
yang sedang digerakkan jika silinder bergerak ke posisi yang dituju. Misalnya,
gerakan A+ menunjukkan limit switch a1 yang diperintahkan bekerja, dan gerakan A-
menunjukkan limit switch ao yang diperintahkan bekerja. Dalam praktiknya,
penandaan elemen-elemen suatu rangkaian pneumatik menggunakan kombinasi
angka dan huruf.
. .Penerapan sistem Pneumatik
Setelah peserta didik mengetahui bagian dan fungsi dari komponen maka langkah
berikutnya adalah merangkai menjadi sistem pneumatik. Sistem pneumatik adalah
rangkaian komponen pneumatik yang menggerakkan actuator . Berikut dasar dari
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar Sirkuit Pneumatik pengendalian langsung
ambar Sirkuit Pneumatik pengendalian tidak langsung
Dari rangkaian di atas dapat dilihat bahwa silinder bisa digerakkan langsung
dengan input an (tombol dll) ataupun dengan ditambah dengan katup
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
C. angkuman Contoh soal :
ambar Soal aplikasi pneumatik
Deskripsi soal :
Benda didorong ke dalam mesin dari tempat penyimpanan dengan
mempergunakan silinder (Tunggal atau Ganda). Torak silinder keluar apabila
ditekan dan kembali ke posisi semula apabila dilepas.
a. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja tunggal
b. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja ganda
c. Gambarkan rangkaian komponen tersebut sehingga bekerja sesuai dengan
soal di atas. Menggunakan silinder tunggal ataupun silinder ganda
Jawaban :
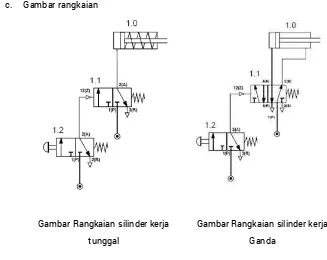
a. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
- Katup 3/2 dengan pilot pneumatik dengan spring return - Silinder kerja tunggal
b. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
c. Gambar rangkaian
Gambar Rangkaian silinder kerja
tunggal
Gambar Rangkaian silinder kerja
Ganda
C. angkuman
Actuator melakukan banyak pekerjaan dalam hal membangkitkan berbagai
pergerakan misalnya cilinder dan motor pnumatik. Actuator merupakan piranti
terakhir dari untaian kontrol. Aktuator mengubah control signal ke dalam suatu
kerja tertentu. Contoh actuator yang banyak dijumpai di dalam industrial
automation, yaitu Cylinders, motors, lighting devices, heating devices, visual and
acoustic alarm devices, dan lain-lainnya.
Dilihat dari jenis pergerakannya, maka actuator dapat dikelompokkan menjadi 3
main areas, yaitu
- Linear motion
- swivel motion
- rotary motion
- End effectors
Katub kendali aliran atau flow-control valve, mengendalikan aliran udara kempa,
MODUL PENGEND
memiliki sistem mekanik, sehingga dapat digunakan untuk mengendalikan
secara jarak jauh “remote” melalui sinyal yang dikirimkan oleh kontroler.
Jenis katub kendali antara lain, Katub 5/2, Aktuasi Pnumatik dari satu sisi, Katub
3/2, Aktuasi Pnumatik dari satu sisi, Katub Pengatur Aliran Satu Arah, Katub
Aktuasi Tekanan Ganda (Shuttle) dengan Fungsi OR, dan Katub Pengatur
Tekanan Dari Satu Arah/
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka
bagi operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga
berfungsi sebagai piranti pendeteksi (misalnya sakelar limit dan sakelar
proksimiti). Jenis piranti input antara lain, Katub 3/2 dengan Aktuasi Tombol
Tekan, Normally Closed, Katub 3/2 dengan aktuasi Tombol Tekan, Normally
Open, Katub 3/2 dengan aktuasi Sakelar Seleksi, Katub 3/2 dengan aktuasi
Sakelar Limit roller, Normally Closed, Katub Tekanan sekuensial, Sensor
Proksimiti, dan Katub dengan Penudaan Waktu.
. ugas
Carilah sistem di sekolah yang ada di tempat kalian yang bisa di aplikasikan
dengan sistem pneumatik. Buatlah desain untuk rangkaian tersebut dan jelaskan
juga nama komponen yang digunakan.
. es ormati
1. Apakah arti simbol-simbol pneumatik berikut ini ?
Simbol rti Simbol
2(A)
MODUL PENGEND
2. Sebutkan jenis katup / valve pengendali !
3. Ada berapa jenis actuator pneumatik dilihat dari penggerakknya?
4. Jelaskan prinsip kerja silinder single acting
5. Apa saja jenis pilot yang digunakan pada katup / valve ? . ugas
. es ormati
MODUL PENGEND
1. arti simbol-simbol pneumatik
Simbol rti Simbol
2(A)
3(R) 1(P)
Katup 3/2 N/C dioperasikan dengan tombol dan kembali
dengan pegas
2(A)
3(R) 1(P)
Katup 3/2 N/O dioperasikan dengan rol dan kembali dengan
pegas ( limit switch )
2(A)
3(R) 1(P)
Katup 3/2 N/C dioperasikan dengan rol idle dan kembali
dengan pegas
2(A)
3(R) 1(P)
Katup 3/2 N/C dioperasikan secara manual dengan
pengunci dan kembali dengan pegas ( selector switch )
1(P) 2(B)
3(S) 4(A)
5(R)
Katup 5/2 dioperasikan dengan udara ( pneumatik ) dan
kembali dengan pegas
Katup 5/2 dioperasikan dengan solenoid atau manual
dengan pilot udara dan kembali dengan pegas atau secara
manual.
Katup 5/2 dioperasikan dan dikembalikan dengan solenoid
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
4. Cara kerja single acting adalah apabila diberi input maka piston akan
bergerak maju, dan saat input di ambil / dimatikan maka silinder akan
kembali secara otomatis karena ada spring didalamnya.
5. Jenis pilot pada valve adalah pilot pneumatik(udara), pilot listrik (solenoid)
dan pilot kombinasi ( pilot pneumatik dan pilot listrik)
. Lembar ker a Praktikum :
PengontrolanSilinder dengan Sistem Langsung
Deskripsi :
Kontrol langsung adalah kontrol yang memberi perintah langsung pada
aktuator. Kontrol langsung hanya dipilih jika volume silinder tidak besar,
dan dalam proses perubahan dikontrol oleh satu elemen sinyal.
Menggerakkan silinder adalah salah satu pertimbangan yang penting
dalam pengembangan solusi dari sistem kontrol. Energi pneumatik
dikirim ke Silinder melalui sebuah katup tombol tekan. Rangkaian untuk
keperluan tersebut dapat dikembangkan sebagai berikut.
Soal
Gambarkan rangkaian dari gambar di atas ke dalam simulasi fluidsim, amati
pergerakan silinder dan tombolnya. . unci a aban es ormati
Simbol rti Simbol
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
Praktikum
Pengontrolan Silinder dengan Sistem Tak Langsung
Silinder yang keluar dan masuk dengan cepat atau silinder dengan diameter
piston besar memerlukan jumlah udara yang banyak. Untuk pengontrolannya
harus dipasang sebuah katup kontrol dengan ukuran yang besar juga. Jika
Tenaga yang diperlukan untuk mengaktifkan katup tidak mungkin dilakukan
secara manual karena terlalu besar, maka harus dibuat rangkaian pengontrol
tidak langsung. Disini melalui sebuah katup kedua yang lebih kecil, dihasilkan
sinyal untuk mengaktifkan katup kontrol yang besar.
Rangkaian silinder kerja tunggal Rangkaian silinder kerja Ganda
Soal
Gambarkan rangkaian dari gambar di atas ke dalam simulasi fluidsim, amati
pergerakan silinder dan katupnya.
Praktikum
Silinder kerja ganda, kontrol tidak langsung
Plat besi dibentuk menjadi “U” dengan menggunakan silinder kerja ganda.
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
Soal :
1. Gambarkan rangkaiannya pada simulasi fluidsim.
2. Tuliskan komponen yang dibutuhkan dan cara kerjanya.
. P L
L P U
. u uan Pembela aran
1. Peserta didik dapat mengidentifikasi kontrol elektropneumatik
2. Peserta didik dapat mengenal simbol pneumatik dan elektrik pada sistem
elektropneumatik
3. Peserta didik dapat membaca dan membuat diagram kontrol
elektropneumatik.
4. Peserta didik dapat membuat rancangan sederhana sistem kontrol
elektropneumatik.
. Uraian ateri
. . ontrol Pengendali 2.1.1. Sakelar pengendali
Sakelar pengendali adalah elemen masukan yang berfungsi untuk menghubungkan
atau memutuskan rangkaian listrik. Untuk memahami sakelar pengendali perlu kita
kenal dulu adalah kontak-kontaknya, karena bagian inilah yang berfungsi
menghubungkan atau memutus rangkaian. Di dalam sistem elektropneumatik yang Praktikum
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
sangat perlu diperhatikan adalah terminologi posisi kontak awal dan posisi kontak
saat kerja. Dua istilah yang dipakai adalah:
Normal terbuka (N/O)
Normal tertutup (N/C)
Pengertian normal tertutup dalam kontak sakelar adalah dalam keadaan normal
(tidak aktif), ada energi listrik yang mengalir dari terminal masukan ke terminal
keluaran. Pengertian “tertutup” disini adalah secara fisik posisi kontak terhubung
dalam keadaan tidak aktif. Berikut ini adalah gambar kontak pada posisi N/C.
ambar ontak sakelar dengan kon igurasi C
2.1.2. Macam macam jenis kontak
Pada dasarnya terdapat 3 macam jenis kontak :
a. Kontak normal terbuka (Normally Open /NO) yaitu kontak dalam keadaan
tidak aktif, dalam hubungan terbuka.
b. Kontak normal tertutup (Normally Close /NC) yaitu kontak dalam
keadaan tidak aktif , dalam hubungan tertutup.
c. Kontak pemindah/tukar (Changeover contacts/CO) yaitu gabungan dari
kontak normal terbuka dan normal tertutup.
Gambar berikut menunjukkan posisi masing-masing kontak dalam keadaan aktif
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar macam macam kontak
Kontak akan bekerja (aktif) dengan berbagai macam pelayanan, seperti tombol
tekan, mekanik, listrik atau pneumatik. Kontak dengan pelayanan tombol tekan
misalnya sakelar tombol tekan, kontak dengan pelayanan mekanik, misalnya
limit switch. Kontak dengan pelayanan listrik misalnya relai. Kontak dengan
pelayanan pneumatik misalnya converter pneumatik-listrik.
Sakelar dapat terdiri dari satu jenis kontak N/O atau N/C atau tukar. Untuk
keperluan yang lebih luas dapat terdiri lebih dari satu kontak N/O, N/C, C/O atau
kombinasi. Gambar berikut menunjukkan kontak dengan
pelayanan tombol tekan dengan konfigurasi N/O dan N/C.
Konfigurasi N/O
ambar on igurasi C
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar kon igurasi dan C
Pada rangkaian dengan tombol tekan konfigurasi N/O, jika tombol ditekan kontak
tertutup dan rangkaian menjadi tertutup, sedangkan pada rangkaian dengan
tombol tekan kontak N/C rangkaian akan menjadi terbuka. Bila tombol dilepas
kontak akan kembali ke posisi semula. Tombol tekan dengan prinsip kerja seperti
itu dinamakan sakelar tekan tanpa pengunci (momentary switch)
2.1.3. Identitas Kontak saklar
Sakelar sederhana dengan satu jenis kontak sangat mudah diidentifikasi,
misalnya sakelar dengan satu jenis kontak N/O mempunyai 2 kontak yang terdiri
kontak masukan dan kontak keluaran. Sakelar kutub banyak
mempunyai beberapa jenis kontak. Dalam hal ini sangatlah sulit untuk mengenali
masing-masing kontak. Oleh karena itu identitas (tanda) kontak sangat
diperlukan.
Untuk mengidentifikasi kontak sakelar termasuk juga kontak relai menggunakan
sistem nomor. Sedangkan sakelar diidentifikasi dengan huruf “S”. Bila jumlah
sakelar dalam satu rangkaian lebih dari satu maka
sakelar pertama diidentifikasi dengan “S1”, sakelar berikutnya, S2, S3
dan seterusnya. Gambar 1.25 menunjukkan nomor kontak dari beberapa
sakelar .
MODUL PENGEND
Sakelar dengan satu jenis kontak N/O, misaknya S1 diidentifikasi dengan angka
digit 3 dan 4. Sakelar S2 yang mempunyai 2 jenis kontak N/O diidentifikasi
dengan 2 digit (13-14 dan 23-24 )
Digit pertama (1) menunjukkan kontak pertama dan digit kedua (3-4)
menunjukkan jenis kontak N/O.
Digit pertama (2) menunjukkan kontak kedua dan digit kedua (3-4)
menunjukkan jenis kontak NO
Sakelar S3 yang mempunyai 2 jenis kontak N/C diidentifikasi dengan 2 digit
(11-12 dan 21-22 ) :
Digit pertama (1) menunjukkan kontak pertama dan digit kedua (1-2)
menunjukkan jenis kontak N/C.
Digit pertama (2) menunjukkan kontak kedua dan digit kedua (1-2)
menunjukkan jenis kontak N/C
Garis putus-putus diantara kontak pada S2 dan S3 menunjukkan
kontak-kontak tersebut saling terhubung secara mekanik. Dengan kata lain jika sakelar
dioperasikan kedua kontak bekerja secara bersamaan.
2.1.4. Metode pengaktifan sakelar
Sakelar tekan atau jungkit :
Sakelar jenis pengunci disebut juga tombol tekan dengan pengunci yaitu
pada saat aktif kontak dikunci secara mekanik. Tombol ditekan kontak N/O
terhubung, penekanan dilepas kontak tetap terhubung karena kontak
terkunci. Untuk mengembalikan kontak ke posisi semula maka harus
dilakukan penekanan tombol kembali.
Sakelar tekan tanpa pengunci disebut juga tombol tekan tanpa pengunci
yaitu jika penekanan tombol dilepas maka kontak kembali seperti semula. ambar kon igurasi dan C
MODUL PENGEND
ALI
AN SISTEM PNEUM
A
TIK MENGGUN
AKAN PL
C SIEMENS S7 PC-300
ambar acam macam saklar
. .Limit S itc . . . Pendahuluan
Kontak listrik limit switch secara mekanik dihubungkan atau diputuskan oleh
gaya dari luar. Limit switch mempunyai umur kontak sampai mencapai kira-kira
10 juta periode pensakelaran. Kemampuan tegangan
dan arus listrik tergantung dari desainnya. Jika limit switch dipakai untuk
kerja penghitungan, kekuatan kontak-hubung perlu diperhitungkan. Waktu
hubung yang diperlukan secara mekanik berkisar antara 1 sampai 15 milidetik.
Simbol limit switch adalah sebagai berikut :
ambar ontak limit s itc
Komponen paling penting dari limit switch adalah kontak. Bahan kontak yang
digunakan adalah emas-nikel, emas murni, perak dan perak-nikel.
. . . Cara er a
Cara kerja limit switch diperlihatkan seperti gambar berikut. Dalam keadaan tidak
aktif (tuas rol tidak tertekan), kontak N/O dalam keadaan terbuka dan kontak N/C
dalam keadaan tertutup. Jika rol tertekan dengan tekanan lebih besar daripada
gaya pegas penahan tekanan (1), maka pengungkit (3) menarik plat penghubung