BAB II
DASAR TEORI
2.1 Poligon
Poligon merupakan serangkaian segi banyak. Secara harfiah poligon artinya sudut banyak. Namun, arti yang sebenarnya adalah rangkaian titik-titik secara berurutan, sebagai kerangka dasar pemetaan. Besaran yang diukur dalam poligon adalah unsur-unsur sudut di setiap titik dan jarak di setiap dua titik yang berurutan. Pengukuran poligon adalah pekerjaan menetapkan stasiun-stasiun poligon dan membuat pengukuran-pengukuran yang perlu, adalah salah satu cara yang paling sederhana atau paling dasar dan paling banyak dilakukan untuk menentukan letak nisbi titik-titik, karena metode ini mempunyai beberapa keuntungan dibanding metode lainnya, antara lain : 1. Bentuknya dengan mudah dapat disesuaikan dengan daerah yang akan
dipetakan
2. Metode pengukuran poligon sederhana 3. Peralatan yang dibutuhkan mudah didapat 4. Metode perhitungan mudah
Poligon ini bermacam-macam, oleh karenanya untuk membedakannya didasarkan pada kriteria tertentu, antara lain :
Atas dasar titik ikat : terikat sempurna, terikat sepihak, bebas (tanpa ikatan)
Atas dasar bentuk : terbuka, tertutup, bercabang
Atas dasar alat yang digunakan untuk pengukuran : poligon teodolit (poligon sudut), poligon kompas
Atas dasar penyelesaian : hitungan (numeris) dan grafis
Atas dasar tingkat ketelitian : tingkat I, tingkat II, tingkat III, tingkat IV (rendah)
Dalam penulisan laporan ini hanya akan membahas poligon yang berdasarkan atas bentuknya, yaitu poligon tertutup dan terbuka.
1. Poligon Tertutup
Poligon tertutup adalah poligon yang titik awal dan akhirnya menjadi satu. Poligon macam ini merupakan poligon yang paling disukai dilapangan karena tidak membutuhkan titik ikat yang banyak yang memang sulit didapatkan dilapangan. Namun, hasil ukurannya tetap terkontrol.
Poligon tertutup memberikan pengecekan pada sudut-sudut dan jarak-jarak tertentu yang merupakan suatu pertimbangan yang sangat penting.
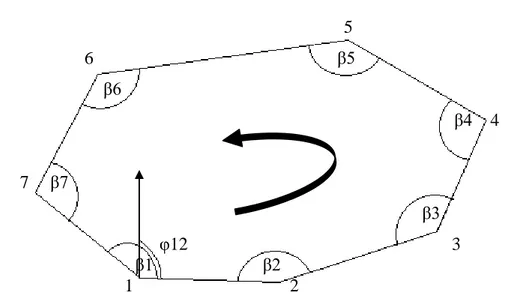
Gambar poligon tertutup sebagai berikut : a. 5 6 β5 β6 β4 4 7 β7 β3 φ12 3 β1 β2 1 2
Gambar 2.1. Poligon tertutup sudut dalam
Poligon tertutup sudut dalam ini mempunyai rumus : ( n – 2 ) x 180 Keterangan gambar :
= Besarnya sudut. φ12 = Azimuth awal. X1;Y1 = Koordinat titik A.
n = jumlah titik sudut.
d23 = jarak antara titik 2 dan titik 3.
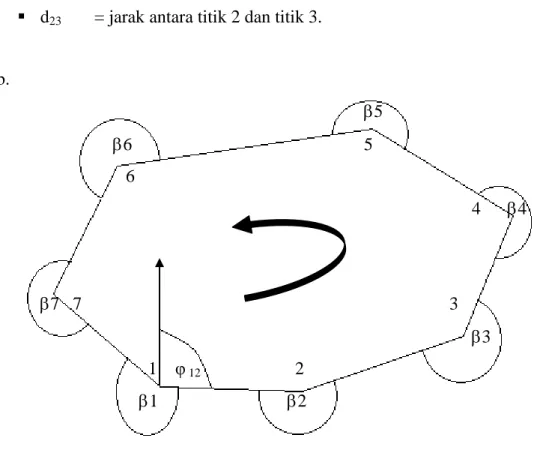
b. 5 6 5 6 4 4 7 7 3 3 1 φ 12 2 1 2
Gambar 2.2. Poligon tertutup sudut luar
Poligon tertutup sudut luar ini mempunyai rumus : (n + 2 ) x 180 Keterangan gambar:
= Besarnya sudut. φ 12 = Azimut awal. n = Jumlah titik sudut.
d23 = Jarak antara titik 2 dan titik 3.
2. Poligon Terbuka
Poligon terbuka terdiri atas serangkaian garis yang berhubungan tetapi tidak kembali ke titik awal atau terikat pada sebuah titik dengan ketelitian yang sama atau lebih tinggi ordenya.
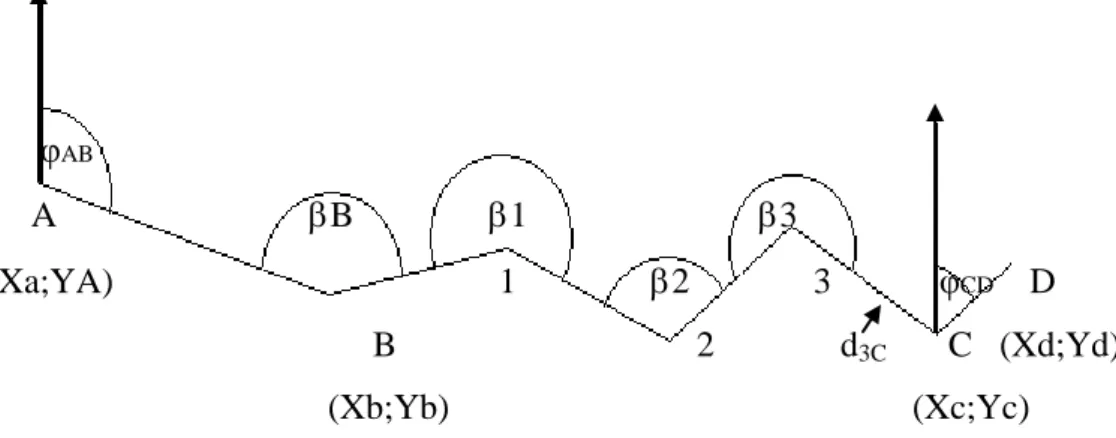
φAB A B 1 3 (Xa;YA) 1 2 3 φCD D B 2 d3C C (Xd;Yd) (Xb;Yb) (Xc;Yc)
Gambar 2.3. Gambar poligon terbuka
Keterangan gambar:
AB = Azimuth awal. CD = Azimuth akhir. (Xa;Ya) = Koordinat awal. (Xd;Yd) = Koordinat akhir. = Besarnya sudut.
d3C = Jarak antara titik 3 dan titik C. Rumus poligon terbuka:
a. Perataan sudut.
Dari titik A dan B dapat dicari azimuth awal = AB dan dari titik C dan titik D dapat dicari azimuth akhir = CD. Maka azimuth titik yang lain menggunakan rumus: akhir = awal B 180 = ( akhir - awal ) + n. 180 + fβ = (CD - AB ) + n. 180 + fβ b. Perataan koordinat. 1) Koreksi fx.
Proyeksi ke sumbu x dari sisi B-1 = d b1 sin b1 1-2 = d12 sin 12
2-3 = d23 sin 23 3-4 = d34 sin 34 4-5 = d45 sin 45 5-C = d5C sin 5C + Total = d sin
Total proyeksi tersebut harganya = Xc – Xb
= X akhir – X awal
Karena terjadi kesalahan sebesar fx, maka rumus koreksi sumbu x adalah :
d sin = ( X akhir – X awal ) + fx
Besarnya koreksi fx untuk tiap sisi adalah: fxi = ( di / d ) x fx
2) Koreksi fy.
Proyeksi ke sumbu y dari sisi B-1 = d b1 cos b1 1-2 = d12 cos 12 2-3 = d23 cos 23 3-4 = d34 cos 34 4-5 = d45 cos 45 5-C = d5c cos 5C + Total = d cos Total proyeksi tersebut harganya = Yc – Yb
= Y akhir – Y awal
Karena terjadi kesalahan sebesar fy, maka rumus koreksi sumbu y adalah :
d cos = ( Y akhir – Y awal ) + fy
Besarnya koreksi fy untuk tiap sisi adalah: fyi = ( di / d ) x fy.
3) Perhitungan koordinat.
Y2 = Y1 + d12 scos 12
Didalam pengukuran poligon ini harus terdapat beberapa hal yaitu: 1. Sudut atau arah poligon.
Pengukuran sudut atau arah poligon ini dapat ditentukan dengan berbagai cara yaitu:
a. Pengukuran poligon dengan sudut dalam. b. Pengukuran poligon dengan sudut luar. c. Pengukuran azimuth.
Azimut adalah sudut mendatar yang dihitung dari arah utara searah jarun jam sanpai ke arah yang dimaksud.
2. Pengukuran panjang.
Pengukuran panjang dilakukan dengan menggunakan pita ukur yaitu dengan mengukur panjang antara patok 1 ke patok yang lainnya.
Setelah terdapat data yang diperoleh, maka data itu harus dilakukan perhitungan. Hitungan poligon dapat dilakukan dengan beberapa langkah antara lain:
a. Perataan sudut.
Langkah pertama dalam hitungan poligon adalah mengkoreksi sudut-sudut sehingga diperoleh jumlah geometrik yang benar. Perataan sudut-sudut ini biasanya dinamakan kesalahan penutup sudut. Rumus kesalahan penutup sudut adalah sebagai berikut:
Untuk sudut dalam.
= [ ( n – 2 ) x 180 ] + f β Untuk sudut luar.
= [ ( n + 2 )x 180 ] + f β Keterangan :
= Jumlah sudut. n = Jumlah titik sudut. f β = Koreksi sudut.
b. Penentuan azimuth.
Penentuan azimuth ini biasanya telah diketahui azimuth awalnya. Untuk menghitung azimuth di titik–titik selanjutnya yaitu dengan rumus :
akhir = awal 180 Keterangan :
akhir; awal = Besarnya azimuth.
= Besarnya sudut yang terkoreksi. c. Perhitungan koreksi fx.
Besarnya koreksi fx dapat dihitung dengan rumus: Fx = d sin
Setelah diketahui besarnya koreksi fx maka akan didapat hasil d sin terkoreksi untuk mendapatkan koordinat sumbu X.
d. Perhitungan koreksi fy.
Besarnya koreksi fy dapat dihitung dengan rumus : Fy = d cos
Setelah diketahui besarnya koreksi fy maka akan didapat hasil D cos terkoreksi untuk mendapatkan koordinat sb. Y.
e. Menghitung koordinat-koordinat per titik.
Untuk mendapatkan koordinat titik-titik lain maka digunakan rumus sebagai berikut : X2 = X1 + D12 sin 12 Y2 = Y1 + D12 cos 12 Keterangan : X2 ; Y2 = Koordinat akhir. X1 ; Y1 = Koordinat awal. d12 sin 12 = d sin terkoreksi. d12 cos 12 = d cos terkoreksi.
2.2 Waterpass
Waterpass (levelling) adalah suatu operasi untuk menentukan beda tinggi antara dua titik di atas permukaan tanah. Hasil-hasil dari pengukuran waterpass sangat penting untuk mendapatkan data diantaranya digunakan untuk keperluan pemetaan, perencanaan jalan / jalan kereta api, saluran, penentuan letak bangunan gedung yang didasarkan atas elevasi tanah yang ada, perhitungan urugan dan galian tanah, penelitian terhadap saluran yang sudah ada, dan lain-lain.
Istilah-istilah yang sering digunakan dalam waterpass antara lain sebagai berikut :
1. Tinggi
Tinggi adalah jarak dari bidang referensi yang telah ditetapkan ke suatu titik tertentu sepanjang garis vertikal.
2. Beda tinggi
Beda tinggi adalah perbedaan vertikal dua titik. 3. Mean Sea Level ( muka laut rata-rata )
Muka laut rata-rata adalah hasil rata-rata dari pengukuran permukaan laut tiap-tiap jam selama jangka waktu yang lama.
Macam-macam pengukuran beda tinggi :
1. Pengukuran beda tinggi secara langsung dengan menggunakan pita ukur. Hal ini dapat kita jumpai pada pembuatan gedung bertingkat, dimana tinggi lantai masing-masing tingkat diukur dengan menggunakan pita ukur.
2. Pengukuran beda tinggi dengan menggunakan alat waterpass.
Pada cara ini, didasarkan atas kedudukan garis bidik teropong yang dibuat horizontal dengan menggunakan gelembung nivo.
3. Pengukuran beda tinggi dengan menggunakan alat barometer.
Pada dasarnya ada hubungan antara ketinggian tempat dengan tekanan udara dimana makin tinggi tempatnya, makin kecil tekanan udara. Dengan alat barometer ini, ketinggian dapat diukur.
4. Pengukuran beda tinggi dengan menggunakan cara Trigonometri.
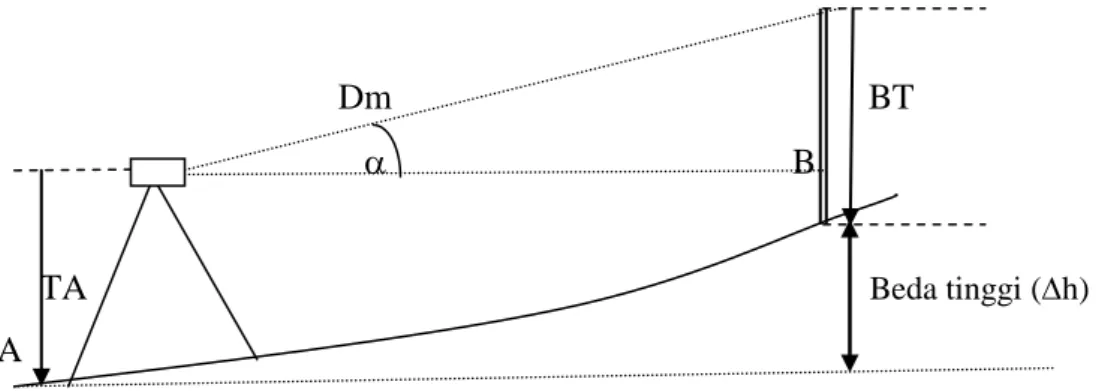
Beda tinggi dapat diukur dengan menggunakan alat yang dilengkapi dengan pembacaan sudut vertikal, seperti pada theodolit.
Dm BT B
TA Beda tinggi (h) A
Gambar 2.4. Pengukuran beda tinggi
Rumus beda tinggi antara A dan B adalah :
Beda tinggi = Tinggi Alat + Dm sin - BT
5. Rumus Tachimetri
Untuk mempercepat hitungan jarak dan beda tinggi antara titik ikat dan detil telah dubuat alat ukur theodolit tipe khusus, yang dapat menghitung secara langsung jarak datar dan beda tinggi tersebut dengan hanya membaca rambu yang dibidik dengan sistem reduksi tachimetri.
D = 100 (BA – BB) sin2 V
h = TA + 100 (BA – BB) sin V cos V – BT Keterangan :
D = Jarak.
= 90 - Vertikal ( vertikal terdapat dalam theodolit ) h = Beda tinggi antara pengukuran theodolit dengan tinggi daerah
yang diukur. TA = Tinggi alat. BA = Batas Atas.
BB = Batas Bawah. BT = Batas Tengah. Sin V = Sin sudut vertikal. Cos V = Cos sudut vertikal.
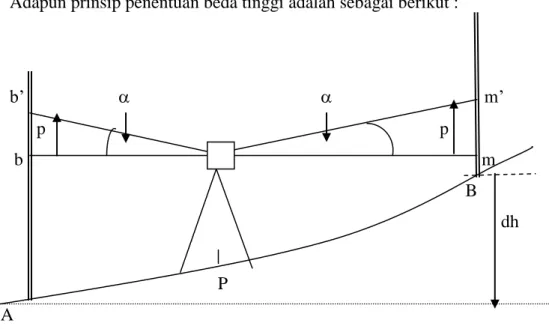
Adapun prinsip penentuan beda tinggi adalah sebagai berikut :
b’ m’ p p b m B dh P A
Gambar 2.5. Prinsip penentuan beda tinggi
Gambar di atas adalah cara untuk menentukan beda tinggi antara titik A dan titik B. Bila alat waterpass telah memenuhi syarat, maka alat diletakkan di titik P dimana jarak PA = PB
Pembacaan BT ke A = b Pembacaan BT ke B = m
Maka beda tinggi titik A dan B adalah: Dh = b – m
Atau secara umum dapat dikatakan bahwa beda tinggi antara dua titik adalah sama dengan pembacaan BT belakang dikurangi dengan pembacaan BT muka.
Ada berbagai macam peralatan sipat datar yang dugunakan dalam pengukuran, antara lain sebagai berikut :
1. Waterpass
Waterpass ini dipasangkan di atas kaki tiga dan pandangan dilakukan melalui teropong. Ada beberapa macam bagian-bagian dari waterpass, antara lain:
a. Lup. Lensa yang bisa disetel menjadi alat pengamat melakukan pembidikan. Lup tersebut diputar agar salib sumbu bidik berada dalam fokus.
b. Teropong. Tabung yang menjaga agar semua lensa dan gigi fokus berada pada posisinya yang benar.
c. Penahan sinar. Sebuah tudung metal atau plastik yang dipasang di atas lensa obyektif untuk melindungi lensa tersebut dari kerusakan dan untuk mengurangi silau pada waktu level digunakan.
d. Tombol fokus. Sebuah tombol pengatur yang memfokuskan level sacara internal terhadap target yang dikehendaki.
e. Piringan horizontal.
f. Sekrup-sekrup level. Sekrup-sekrup pengatur yang dipaki untuk mendatangkan level.
g. Alas. Alas tipis berukuran 3 ½ x 8 “ yang mengikat alat pada tripod. h. Unting-unting, kait dan rantai. Kait dan rantai ditempatkan tepat di
tengah-tengah di bawah level, tempat unting-unting digantung bila sudut pandang akan diputar.
i. Sumbu yang dapat digeser-geser. Sebuah alat yang dimaksudkan untuk memungkinkan ditempatkannya sumbu alat tepat di atas suatu titik tertentu.
j. Nama dan nomor seri plat.
k. Sekrup tengensial horizontal. Sebuah sekrup pengatur untuk memperkirakan kelurusan antara salib sumbu bidik dan sasaran bidang horizontal.
l. Tabung nivo. Sebuah tabung gelas bergraduasi yang berisi cairan yang sejajar dengan garis bidik teropong.
2. Kaki tiga
Kaki tiga digunakan untuk menyangga alas waterpass dan menjaganya tetap stabil selama pengamatan. Kaki tiga ini mempunyai dua baut yaitu baut pertama digunakan untuk menentukan sambungan kaki dengan kepala sedangkan baut kedua digunakan untuk penyetelan kekerasan penggerak engsel antara kaki tiga dengan kepalanya.
3. Mistar ukur / rambu ukur
Mistar ukur adalah sebuah pita ukur yang ditopang vertikal dan digunakan untuk mengukur jarak vertikal antara garis bidik dan sebuah titik tertentu yang berada di atas atau di bawah garis bidik tadi.
Rambu ini terbuat dari bahan kayu atau aluminium. Panjangnya 3 meter (ada yang 4 dan 5 meter). Hal terpenting yang perlu diperhatikan dari rambu ukur ini adalah pembagian skala yang benar-benar teliti agar menghasilkan pengukuran yang baik pula. Di samping itu cara memegangnya harus benar-benar tegak (vertikal).
Setelah mengetahui bagian-bagian dari waterpass tersebut maka selanjutnya mengetahui bagaimana cara penyetelan waterpass. Penyetelan waterpass alat harus dilakukan sebelum alat tersebut dibawa kelapangan. Alat tersebut harus dipasang dalam posisi yang kira-kira mendatar di atas kedua pasang skrupnya. Karena pemeriksaan ini juga mencangkup pemeriksaan susunan optiknya, salib sumbu titik dan lensa obyektif harus difokuskan dengan tajam. Pemeriksaan dan penyetelan dilakukan dalam tiga tahap yaitu:
1 Tabung nivo
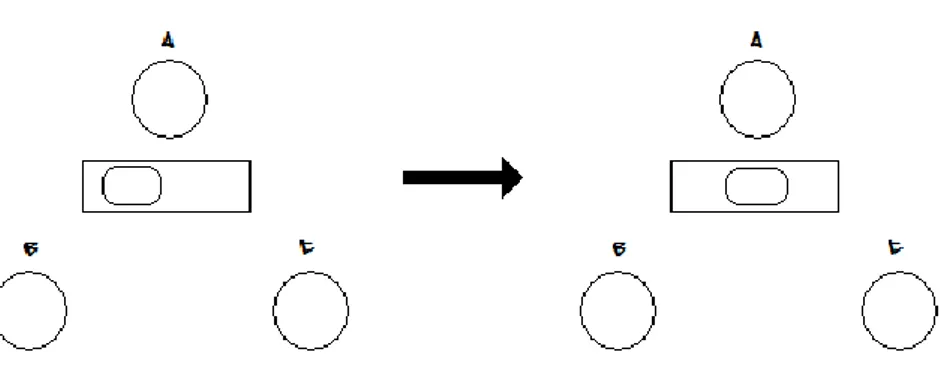
Penyetelan tabung nivo membuat sumbu nivo tegak lurus terhadap sumbu perputaran. Pasang alat tersebut di atas sekrup-sekrup pendatar dengan diametrikal berlawanan dan tengahkan gelembung nivo dengan hati-hati. Putar teropong 180 dan catat gerakan gelembung yang menjauhi tengah-tengah bila alat belum baik. Geser gelembung tadi separuh jarak balik ke tengah tabung nivo dengan memutar sekrup pengangkat pada ujung nivo.
Gambar 2.6. Pengaturan Gelembung Nivo
Datarkan lagi dengan sekrup-sekrup pendatar dan putar alat tersebut 180. Ulangi tahapan sebelumnya kalau gelembung belum tetap ditengah tabung nivo. Periksa penyetelan terakhir dengan memperhatikan bahwa gelembung nivo tetap berada di tengah-tengah tabung nivo selama perputaran penuh.
2 Benang horizontal
Salib sumbu bidik horizontal disetel agar benang horisontalnya terletak pada sebuah bidang yang tegak lurus sumbu vertikal.
BA
BT
BB
Datarkan alat dengan hati-hati. Bidikkan satu ujung dari benang horizontal ke sebuah titik yang telah diketahui. Putar teropong perlahan-lahan terhadap sumbu vertikalnya dengan menggunakan sekrup gerak lambat. Apabila salib sumbu sudah disetel baik, benang tersebut akan tetap berada diatas titik tadi pada seluruh panjangnya. Kalau tidak, longgarkan kedua sekrup pengatur diafragma dengan memutar sedikit demi sedikit kedua sekrup itu secara berlawanan. Balikkan lagi pada titik tadi dan kalau benang tadi tidak mengikuti titik tersebut pada seluruh panjangnya, putar lagi lingkarannya. Ulangi prosedur ini sebanyak yang diperlukan, benang salib sumbu berada diatas titik tersebut pada seluruh panjangnya. Kemudian kencangkan sekrup-sekrup penyetelnya.
3 Garis bidik
Penyetelan garis bidik membuat garis bidik tersebut sejajar dengan sumbu nivo. Cara ini dikenal sebagai uji dua patok. Alat diletakkan antara patok A dan patok B kemudian catat pembacaan pada mistar ukur di atas patok A dan patok B dimana selisihnya merupakan elevasi dari kedua patok.
Pada pengukuran waterpass tentu saja ada kesalahan pengukuran. Kesalahan pengukuran ini dapat dibagi menjadi tiga yaitu :
1. Kesalahan kasar/besar/mistake/blunders.
Kesalahan ini terjadi karena kurang hati-hati, kurang pengalaman, kurang perhatian. Dalam pengukuran jenis kesalahan ini tidak boleh terjadi, maka dianjurkan untuk mengadakan self checking dari pengamatan yang dilakukan. Apabila diketahui ada kesalahan besar, maka dianjurkan untuk mengulang seluruh atau sebagian pengukuran tersebut.
Contoh kesalahan ini : salah baca, salah mencatat data ukuran, salah dengar dari si pencatat.
Umumnya kesalahan ini disebabkan oleh alat-alat ukur sendiri, sepert: a. Salah bak ukur, karena kesalahan bak ukur atau kesalahan tidak sama
pada baca rambu.
b. Salah waterpass, karena adanya kesalahan garis bidik.
Akan tetapi, kesalahan ini juga dapat terjadi karena cara-cara pengukuran yang tidak benar. Dapat dibedakan menjadi dua:
3. Kesalahan Occidental/Random/Compensating/Tak Terduga
Kesalahan ini terjadi karena hal-hal yang tak terduga, seperti getaran tanah, pengaruh alam sekelilingnya, atmosfer, psikis pengamat, dan lain-lain.
2.3 Penampang Memanjang
Penerapan sistem sipat datar sangat penting dalam pengukuran penampang memanjang. Penampang memanjang yaitu penampang vertikal sepanjang garis sumbu pada seluruh panjang suatu kerja.
Sebelum melakukan pekerjaan di lapangan, diperlukan :
1 Penyipatan harus dilakukan sepanjang garis sumbu dengan ketinggian yang diambil pada semua perubahan gradien.
2 Pengukuran horizontal harus dilakukan antara semua titik yang telah diukur ketinggiannya.
Panjang horizontal dari penampang memanjang sangat besar, maka skala vertikal dibuat berbeda dengan skala horizontal, misalnya skala vertikal 1 : 100 dan skala horizontal 1 : 1000.
Prinsip pengukuran penampang memanjang yaitu : b4 m4 b3 m3 b2 m2 B b1 m1 3 2 A 1
Gambar 2.8 .Prinsip pengukuran penampang memanjang
Tiap-tiap titik yang berurutan dan di bedakan pembacaan rambu. Dh A-1 = b1 – m1 ( beda tinggi antara A dan 1)
Dh 1 – 2 = b2 – m2 Dh 2 – 3 = b3 – m3
Dh 3 – B = b4 – m4 + Dh A - B = bi - mi Atau dapat ditulis :
Beda tinggi = Bacaan belakang - bacaan muka
2.4 Penampang Melintang
Penampang melintang yaitu penampang vertikal yang membuat tegak lurus pada garis sumbu suatu kerja.
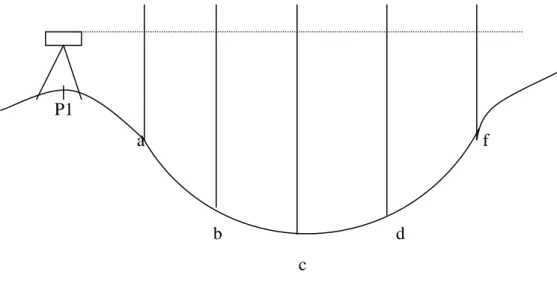
Pada daerah yang relatif datar, satu profil melintang mungkin dengan satu kali kedudukan alat. Namun, pada daerah yang mempunyai topografi curam atau bergelombang tidak cukup dengan sekali berdiri alat, mungkin dua kali atau lebih. Adapun cara hitungan dan penggambarannya pada prinsipnya sama dengan penggambaran profil memanjang, hanya skala jarak dan tinggi disini diambil sama.
Peralatan yang digunakan untuk membuat potongan melintang adalah level dan pita ukur. Data yang diperlukan dalam penampang melintang adalah jarak antar patok dan elevasi titik centerline jalan ( As jalan ). Apabila untuk selokan maka data yang diperlukan adalah jarak antar patok, elevasi as saluran, elevasi as tanggul kiri dan elevasi tanggul kanan.
Pada penampang melintang skala yang dibuat sama untuk kedua arah baik vertikal maupun horizontal.
Gambar pengukuran profil penampang melintang :
P1
a f
b d
c