3 2.1 DEFINISI ROV
Secara umum, wahana bawah air dibedakan menjadi dua kategori yaitu wahana berawak (Manned Underwater Vehicle) dan wahana tidak berawak (Unmanned Underwater Vehicle – UUV). Remotely Operated Vehicle (ROV) adalah robot bawah air yang dapat bermanuver secara tinggi, dioperasikan oleh seseorang di atas kapal. ROV dihubungkan dengan kabel yang membawa sinyal elektrik secara bolak balik antara operator dan wahana ini. Di dalam ROV biasanya terdapat Charge Coupled Device (CCD) dan lampu pencahayaan. Beberapa instrumen dapat ditambahkan untuk menambahkan kemampuan ROV seperti manipulator, water sampler, dan Conductivity, Temperature and Depth (CTD) (NOAA, 2010).
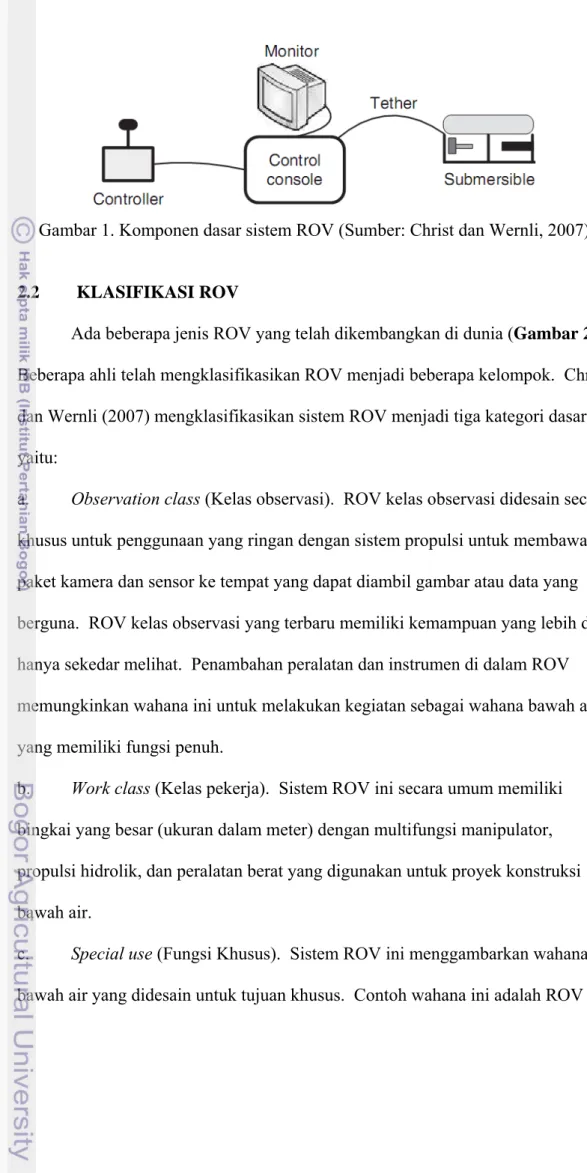
ROV adalah wahana bawah air yang bertenaga listrik dan dikontrol melalui pusat, dapat bermanuver sesuai perintah manusia dengan pendorong (thruster) hidrolik atau elektrik (Hoong, 2010). Definisi lain disampaikan oleh Christ dan Wernli (2007) dimana ROV adalah kamera yang dipasang dalam wadah tahan air, dengan pendorong untuk bermanuver, yang melekat pada kabel ke permukaan dimana sinyal video yang dikirim. Sebuah ROV menerima energi dan informasi perubahan dengan panel kontrol yang terletak di permukaan melalui kabel pusat. Dari panel kontrol, operator dapat merencanakan pekerjaan atau menggunakan satu joystick untuk manuver wahana secara langsung (Gambar 1).
Gambar 1. Komponen dasar sistem ROV (Sumber: Christ dan Wernli, 2007)
2.2 KLASIFIKASI ROV
Ada beberapa jenis ROV yang telah dikembangkan di dunia (Gambar 2). Beberapa ahli telah mengklasifikasikan ROV menjadi beberapa kelompok. Christ dan Wernli (2007) mengklasifikasikan sistem ROV menjadi tiga kategori dasar yaitu:
a. Observation class (Kelas observasi). ROV kelas observasi didesain secara
khusus untuk penggunaan yang ringan dengan sistem propulsi untuk membawa paket kamera dan sensor ke tempat yang dapat diambil gambar atau data yang berguna. ROV kelas observasi yang terbaru memiliki kemampuan yang lebih dari hanya sekedar melihat. Penambahan peralatan dan instrumen di dalam ROV memungkinkan wahana ini untuk melakukan kegiatan sebagai wahana bawah air yang memiliki fungsi penuh.
b. Work class (Kelas pekerja). Sistem ROV ini secara umum memiliki
bingkai yang besar (ukuran dalam meter) dengan multifungsi manipulator, propulsi hidrolik, dan peralatan berat yang digunakan untuk proyek konstruksi bawah air.
c. Special use (Fungsi Khusus). Sistem ROV ini menggambarkan wahana
yang digunakan untuk membenamkan kabel di dasar laut. ROV didesain untuk mengeruk dasar laut agar dapat membenamkan kabel telekomunikasi.
Gambar 2. Berbagai jenis ROV (Sumber: Christ dan Wernli, 2007)
Norsok Standard (2003) mengklasifikasikan ROV menjadi: a. Kelas I – Murni Observasi
Wahana murni observasi secara fisik dibatasi oleh obervasi video. Secara umum wahana berukuran kecil yang hanya dilengkapi dengan kamera video, cahaya dan pendorong (thruster). Wahana tidak dapat melakukan pekerjaan yang lain tanpa adanya modifikasi yang cukup.
b. Kelas II – Observasi dengan opsi adanya muatan (payload)
Wahana mampu untuk membawa sensor tambahan seperti kamera berwarna, sistem pengukuran untuk perlindungan katodik, kamera video tambahan, dan sistem sonar. Wahana Kelas II mampu beroperasi tanpa kehilangan fungsi utamanya sambil membawa setidaknya dua sensor tambahan.
c. Kelas III – tipe pekerja (work class)
Wahana berukuran besar yang mampu untuk membawa sensor tambahan dan/atau manipulator. Wahana Kelas III biasanya memiliki kemampuan ganda yang memungkinkan sensor tambahan dan peralatan beroperasi bersamaan tanpa
menganggu kinerja sistem pusat. Wahana ini lebih besar dan lebih kuat dibandingkan Kelas I dan Kelas II.
Kelas III A – Kekuatan Wahana Tipe Pekerja kurang dari 100 hp (horse power). Kelas III B – Kekuatan Wahana Tipe Pekerja antara 100 hp dan 150 hp.
Kelas III C – Kekuatan Wahana Tipe Pekerja lebih dari 150 hp. d. Kelas IV – Seabed-working Vehicle
Wahana bekerja di dasar laut dengan menggunakan roda atau sistem sabuk traksi yang digerakkan oleh pendorong baling-baling atau kekuatan jet air, atau
kombinasi keduanya. Secara khusus, Wahana Kelas IV lebih besar dan berat dibandingkan Wahana Kelas III dan dikonfigurasikan untuk pekerjaan dengan tujuan khusus. pekerjaan tersebut biasanya mencakup penggalian pipa dan kabel, penggalian, pengerukan dan pekerjaan konstruksi bawah laut yang dioperasikan dari jarak jauh.
e. Kelas V – Prototipe atau wahana yang dalam pengembangan
Wahana di kelas ini termasuk yang sedang dikembangkan dan yang dianggap sebagai prototipe. Wahana dengan tujuan khusus yang tidak sesuai dengan salah satu dari kelas yang di atas juga dimasukkan ke dalam kelas V.
Selain kedua pengklasifikasian di atas, ROV juga diklasifikasikan berdasarkan ukurannya yakni (EVS-380, 2007)
a. Work Class ROV. ROV berukuran sangat besar dan dioperasikan oleh
kru. Pra kru terdiri dari pilot, supervisor, dan dalam beberapa kasus co-pilot. Umumnya para anggota berpengalaman dengan pengetahuan luas dalam
elektronik, mekanik, dan hidrolik. Work Class ROV digunakan untuk operasi laut dalam, penguburan kabel, perbaikan dan pemulihan objek yang besar. ROV ini
diangkat dari dan ke dalam air menggunakan derek. ROV merupakan alat penting di dunia yang membuat pekerjaan bawah air berkurang tantangannya.
b. Kelas Observasi atau General ROV. ROV ini memiliki ukuran yang lebih kecil tapi dapat melakukan tugas-tugas di bawah air, khususnya di daerah yang tidak dapat dilalui oleh Work Class ROV. Tugas-tugas ini meliputi inspeksi pipa, operasi pencarian dan penyelamatan, inspeksi kapal, pencarian harta karun, inspeksi pelabuhan, dan lain-lain. Dalam banyak kasus, ROV ini dapat digunakan dan dikendalikan oleh hanya beberapa orang. Hal ini dapat membuat pekerjaan menjadi lebih mudah dan lebih murah.
c. Mini dan mikro ROV. ROV ini sangat kecil dalam ukuran dan berat. Saat ini, Mini ROV biasanya memiliki berat sekitar 15 kg dan mikro ROV dapat mencapai berat kurang dari 3 kg. Pada dasarnya satu orang bisa membawa sistem ROV yang lengkap pada sebuah perahu kecil, menyebarkan dan
mengoperasikannya tanpa masalah. Wahana ini sangat berguna dalam banyak aplikasi. ROV ini harganya lumayan terjangkau dan dapat menjadi alternatif yang bagus untuk penyelam.
2.3 SEJARAH ROV
ROV pertama kali dibuat pada tahun 1953 oleh Dimitri Rebikoff dengan nama POODLE. Angkatan laut AS mengambil langkah nyata pertama untuk membuat sistem operasi ROV. Angkatan Laut AS membuat ROV dengan nama
Cable-Controlled Underwater Research Vehicle (CURV). Wahana ini dibuat
untuk mengambil bom dan torpedo yang hilang di dasar laut. Kemudian
Angkatan Laut AS membuat Pontoon Implacement Vehicle (PIV) dan SNOOPY. SNOOPY merupakan wahana pertama yang dapat dibawa kemana-mana. Pada
tahun 1974, lebih dari 20 ROV diciptakan. Pada tahun itu dapat dikatakan perkembangan ROV telah mencapai tahap pendewasaan. Setelah itu,
perkembangan ROV semakin pesat. Perkembangan ini sangat dipengaruhi oleh kebutuhan industri lepas pantai. Kebutuhan akan keselamatan kerja menyebabkan perusahaan menggantikan fungsi penyelam dengan menggunakan ROV. Pada tahun 1990-an, diperkirakan ada lebih dari 100 perusahaan pembuat ROV, dan lebih dari 100 operator menggunakan 3000 macam ROV yang berbeda ukuran dan kemampuannya (Christ dan Wernli, 2007).
2.4 KONSTRUKSI ROV 2.4.1 Rangka
Rangka yang digunakan dalam ROV dapat berasal dari beberapa bahan seperti besi, aluminium, PVC, dan Polimetil Metakrilik. Ukuran rangka ROV sangat bergantung dari beberapa kriteria berikut : (Christ dan Wernli, 2007)
i. Berat total ROV di udara,
ii. Volume komponen di dalam ROV, iii. Volume sensor dan instrumen, iv. Volume daya apung,
v. Kriteria beban bantalan poros dari rangka.
Mini ROV yang akan dibuat menggunakan pipa PVC dan pipa besi. Pipa PVC digunakan karena memiliki kelebihan yakni sulit rusak, tahan lama, tidak berkarat, membusuk, dapat digunakan setiap waktu, dan awet (Kietzman, 2011). Pipa besi digunakan karena dapat menambah daya berat ROV yang digunakan untuk mengimbangi daya apung yang dihasilkan oleh pipa PVC.
2.4.2 Motor pendorong/ thruster
Jenis motor dapat dibedakan menjadi dua yakni motor AC dan motor DC. Sejauh ini, ROV menggunakan motor DC karena kekuatan, ketersediaan,
keragaman, kehandalan, dan kemudahan antarmuka (interface). Bagaimanapun juga motor DC memiliki kesulitan dalam desain dan karakteristik operasionalnya. Faktor-faktor ini membuatnya jauh dari sempurna untuk aplikasi ini meliputi: • Kecepatan optimum motor jauh lebih tinggi dari kecepatan rotasi
baling-baling in-water normal sehingga perlu diberikan gigi untuk memperoleh kecepatan efisien operasi.
• Motor DC menyerap arus yang banyak.
• Motor DC membutuhkan skema kontrol Pulse Width Modulation (PWM) motor yang rumit untuk mendapatkan operasi yang tepat. (Christ dan Wernli, 2007)
Motor DC biasa digunakan karena memiliki kecepatan dan torsi yang bagus serta mudah dikontrol arah putaran dan kecepatannya (Delta Electronic, 2007). Motor DC memiliki 2 pin input yaitu tegangan dan ground (Gambar 3). Pembalikan arah putaran motor DC dapat dilakukan dengan membalikkan masukan tegangan dan ground.
Gambar 3. Konfigurasi motor DC (Sumber: Delta Electronic, 2007)
Bilge pump merupakan salah satu jenis pompa yang menggunakan motor
atau perahu untuk menyedot air yang ada di lambung kapal. Bilge pump
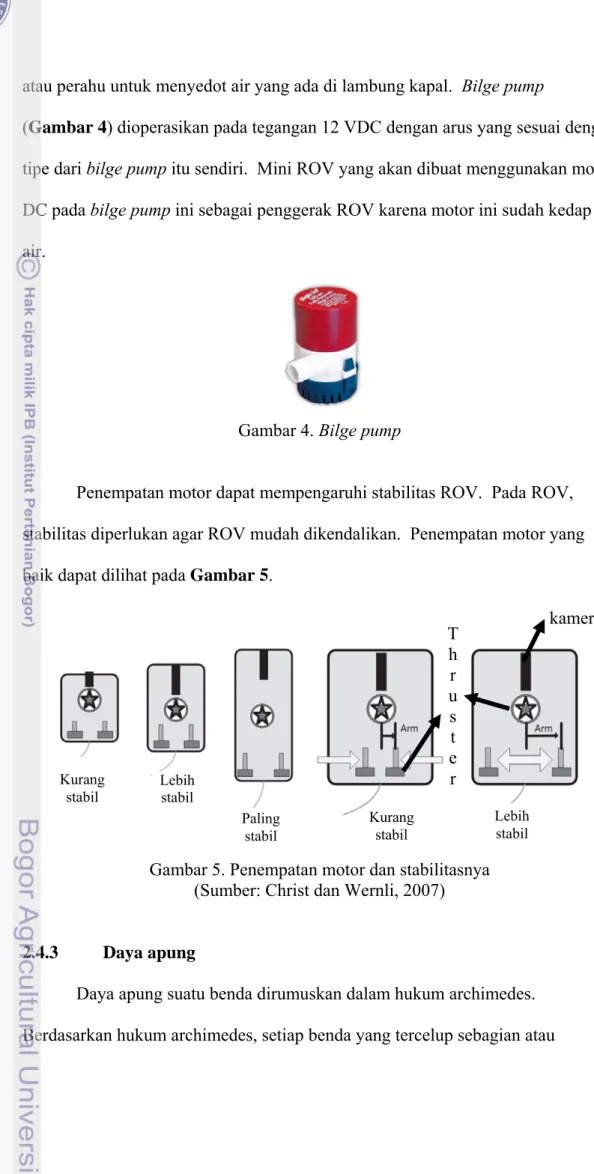
(Gambar 4) dioperasikan pada tegangan 12 VDC dengan arus yang sesuai dengan tipe dari bilge pump itu sendiri. Mini ROV yang akan dibuat menggunakan motor DC pada bilge pump ini sebagai penggerak ROV karena motor ini sudah kedap air.
Gambar 4. Bilge pump
Penempatan motor dapat mempengaruhi stabilitas ROV. Pada ROV, stabilitas diperlukan agar ROV mudah dikendalikan. Penempatan motor yang baik dapat dilihat pada Gambar 5.
Gambar 5. Penempatan motor dan stabilitasnya (Sumber: Christ dan Wernli, 2007)
2.4.3 Daya apung
Daya apung suatu benda dirumuskan dalam hukum archimedes. Berdasarkan hukum archimedes, setiap benda yang tercelup sebagian atau
Kurang
stabil Lebih stabil
Paling stabil Kurang stabil Lebih stabil T h r u s t e r kamera
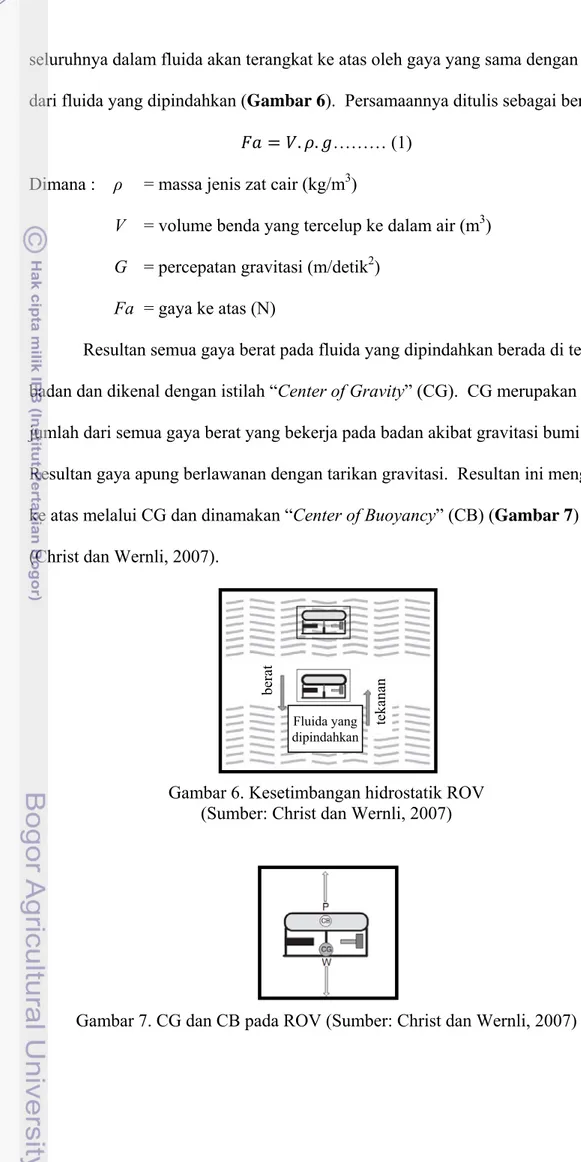
seluruhnya dalam fluida akan terangkat ke atas oleh gaya yang sama dengan berat dari fluida yang dipindahkan (Gambar 6). Persamaannya ditulis sebagai berikut:
. . ……… (1) Dimana : ρ = massa jenis zat cair (kg/m3)
V = volume benda yang tercelup ke dalam air (m3)
G = percepatan gravitasi (m/detik2)
Fa = gaya ke atas (N)
Resultan semua gaya berat pada fluida yang dipindahkan berada di tengah badan dan dikenal dengan istilah “Center of Gravity” (CG). CG merupakan jumlah dari semua gaya berat yang bekerja pada badan akibat gravitasi bumi. Resultan gaya apung berlawanan dengan tarikan gravitasi. Resultan ini mengarah ke atas melalui CG dan dinamakan “Center of Buoyancy” (CB) (Gambar 7) (Christ dan Wernli, 2007).
Gambar 6. Kesetimbangan hidrostatik ROV (Sumber: Christ dan Wernli, 2007)
Gambar 7. CG dan CB pada ROV (Sumber: Christ dan Wernli, 2007)
berat te kana n Fluida yang dipindahkan
2.4.4 Kamera
Kamera merupakan bagian yang penting dalam sebuah ROV. Kamera dapat dianggap sebagai “mata” ROV. Setiap ROV menggunakan kamera ataupun video kamera untuk navigasi maupun untuk memotret benda yang ada di dalam air. Saat ini, sebagian besar sistem ROV yang berukuran kecil menggunakan perangkat kamera charge-coupled device (CCD) yang harganya murah (Gambar 8). Sistem kamera ini terpasang pada papan sirkuit kecil dan menghasilkan sinyal video yang ditransmisikan melalui kabel ke piranti penangkap video (Christ dan Wernli, 2007).
Gambar 8. Kamera CCD (Sumber: Toko Komputer, 2009)
2.4.5 Baling-baling
Baling-baling berfungsi sebagai penggerak ROV. Putaran baling-baling akan membuat aliran fluida mendorong ROV. Arah putaran baling-baling juga akan mempengaruhi aliran fluida. Baling-baling didesain untuk bergerak dan mengarahkan fluida berlawanan dengan arah gerak (Christ dan Wernli, 2007).
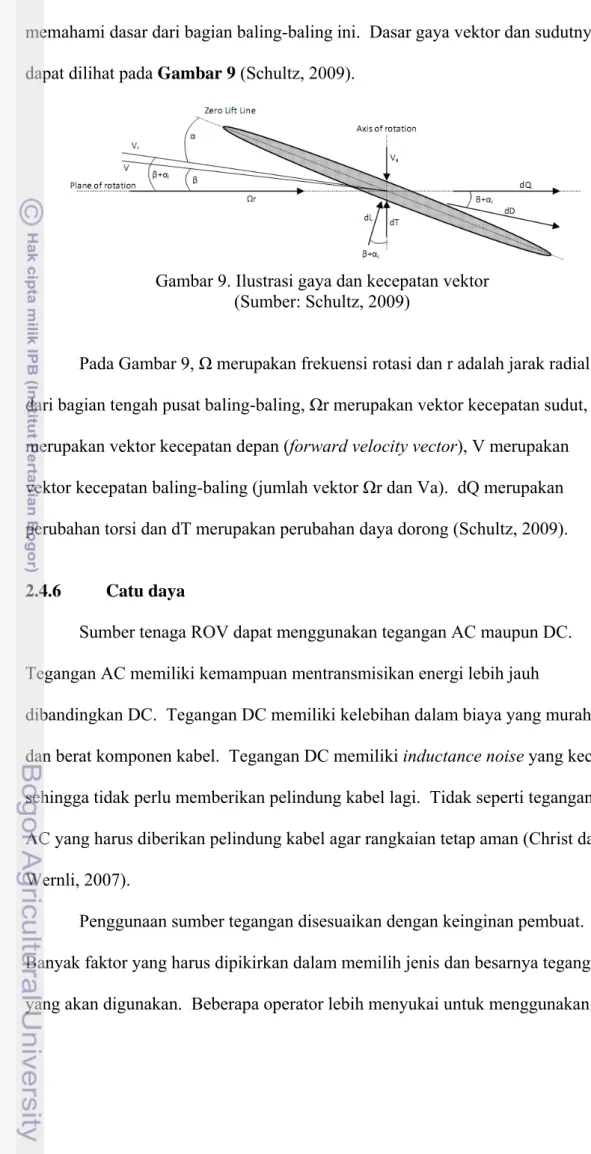
Baling-baling biasanya didesain dengan geometri kompleks yang berubah sepanjang radius bilahnya. Geometri kompleks ini dapat diurai dalam bagian-bagian yang lebih kecil dimulai dari pangkal hingga ujung dari baling-balingnya. Setiap bagian dapat diubah untuk mengoptimalkan daya angkat yang dibutuhkan pada bagian yang ditambahkan. Diagram interaksi gaya dapat membantu
memahami dasar dari bagian baling-baling ini. Dasar gaya vektor dan sudutnya dapat dilihat pada Gambar 9 (Schultz, 2009).
Gambar 9. Ilustrasi gaya dan kecepatan vektor (Sumber: Schultz, 2009)
Pada Gambar 9, Ω merupakan frekuensi rotasi dan r adalah jarak radial dari bagian tengah pusat baling-baling, Ωr merupakan vektor kecepatan sudut, Va merupakan vektor kecepatan depan (forward velocity vector), V merupakan vektor kecepatan baling-baling (jumlah vektor Ωr dan Va). dQ merupakan perubahan torsi dan dT merupakan perubahan daya dorong (Schultz, 2009).
2.4.6 Catu daya
Sumber tenaga ROV dapat menggunakan tegangan AC maupun DC. Tegangan AC memiliki kemampuan mentransmisikan energi lebih jauh
dibandingkan DC. Tegangan DC memiliki kelebihan dalam biaya yang murah dan berat komponen kabel. Tegangan DC memiliki inductance noise yang kecil sehingga tidak perlu memberikan pelindung kabel lagi. Tidak seperti tegangan AC yang harus diberikan pelindung kabel agar rangkaian tetap aman (Christ dan Wernli, 2007).
Penggunaan sumber tegangan disesuaikan dengan keinginan pembuat. Banyak faktor yang harus dipikirkan dalam memilih jenis dan besarnya tegangan yang akan digunakan. Beberapa operator lebih menyukai untuk menggunakan
inverter agar dapat menggunakan tegangan AC. Beberapa sistem ROV yang lebih
kecil hanya menggunakan tegangan DC sebagai sumber tenaga mereka. Pada intinya, tujuan catu daya adalah mengirimkan tenaga untuk menggerakkan
thruster saat beroperasi (Christ dan Wernli, 2007).
2.4.7 Tether/ kabel
Tether adalah suatu kumpulan kabel yang dapat mengalirkan dan memuat
daya listrik, video, maupun sinyal data untuk komunikasi antara operator dan wahana bawah air. Biasanya kabel terbuat dari tembaga atau fiber optik (EVS-380, 2007).
Tether menjadi sangat penting dalam ROV dan menjadi kunci kesuksesan
pengembangan ROV. Tether digunakan karena gelombang Frekuensi Radio (RF) tidak dapat digunakan dalam air. Gelombang RF hanya dapat melakukan
penetrasi beberapa panjang gelombang saja di dalam air dikarenakan atenuasinya yang sangat tinggi. Selain itu, penggunaan tether menjadi pilihan saat ini karena penggunaan transmisi hidroakustik tidak memadai. Transmisi hidroakustik terbatas pada 100 kilobyte tiap detik. Hal ini sangat tidak cukup untuk membawa data video resolusi tinggi. Oleh karena itu, penggunaan tether menjadi mutlak pada ROV agar dapat bekerja secara penuh (Christ dan Wernli, 2007).
2.4.8 Pencahayaan
Pencahayaan sangat diperlukan oleh ROV untuk membantu pengamatan di dalam air. Seperti diketahui bahwa di dalam air cahaya semakin redup karena adanya penghamburan dan penyerapan. Kedua hal ini yang mempengaruhi kejernihan air. Selain itu, pencahayaan diperlukan untuk memperlihatkan warna
asli dari suatu objek. Di dalam air, warna merah terserap pada kedalaman beberapa cm saja.
Lampu yang digunakan merupakan jenis LED (Light Emitting Diode). LED merupakan semikonduktor yang memancarkan spektrum cahaya inkoheren dekat ketika secara elektrik dipasang pada arah maju. Efek ini merupakan bentuk dari elektroluminesen. Warna yang dipancarkan tergantung dari komposisi kimia dari material semikonduktor yang digunakan. Warnanya dapat berupa ultraviolet dekat, cahaya tampak, atau infra merah. Teknologi LED sangat berguna untuk pencahayaan bawah air karena konsumsi tenaga rendah, pembangkitan panas rendah, dapat dikontrol hidup/mati secara cepat, warna tetap selama masa hidup LED, jangka pemakaian panjang, dan biaya pembuatan murah (Christ dan Wernli, 2007).
2.4.9 Mikrokontroler
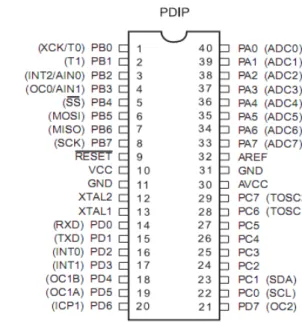
Mikrokontroler ATmega32A (Gambar 10) merupakan salah satu produk Atmel dan termasuk generasi AVR (Alf and Vegard’s Risc processor).
ATmega32A memiliki bagian sebagai berikut (Atmel, 2011) :
1) Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 2) ADC 10 bit sebanyak 8 saluran.
3) CPU yang terdiri dari 32 buah register. 4) Internal SRAM sebesar 2 Kilobyte.
5) Memori Flash sebesar 32 kb dengan kemampuan Read While Write. 6) Unit interupsi internal dan eksternal.
7) Port antarmuka SPI.
9) Antarmuka komparator analog.
10) Port USART (Universal Synchronous and Asynchronous serial Receiver
and Transmitter) untuk komunikasi serial.
Gambar 10. Konfigurasi pin pada mikrokontroler ATmega32A (Sumber: Atmel, 2011)
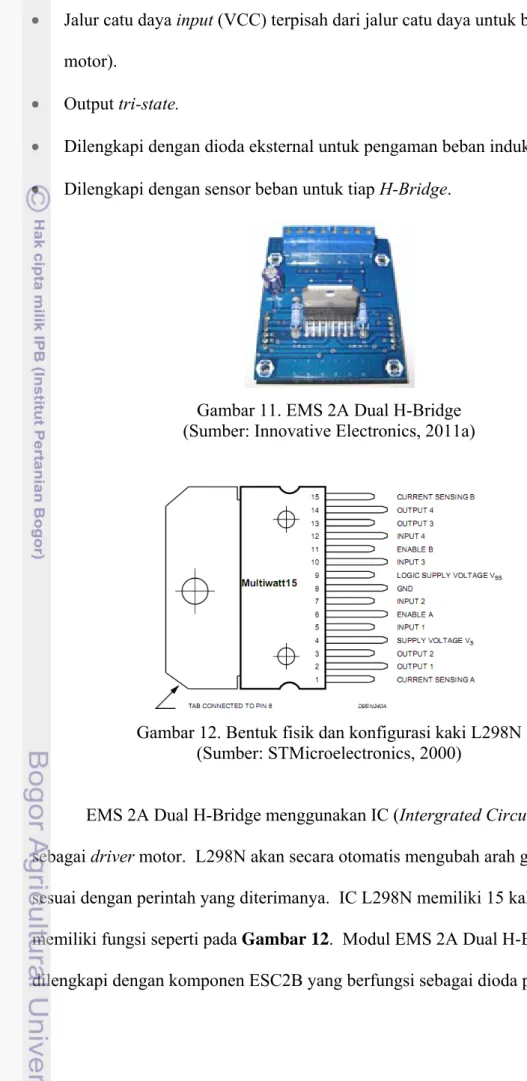
2.4.10 EMS 2A Dual H-Bridge
Embedded Module Series (EMS) 2A Dual H-Bridge (Gambar 11)
merupakan driver H-Bridge yang didesain untuk menghasilkan drive 2 arah dengan arus kontinu hingga 2 Ampere pada tegangan 4,8 Volt hingga 46 Volt. Tiap H-Bridge dilengkapi dengan sensor arus beban yang dapat digunakan
sebagai umpan balik ke pengendali. Modul ini dapat menggerakkan beban-beban induktif seperti relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya. Spesifikasi modul ini adalah sebagai berikut (Innovative
Electronics, 2009a) :
• Terdiri dari 2 driver H-Bridge yang dapat diparalel. • Input kompatibel dengan level tegangan TTL dan CMOS.
• Jalur catu daya input (VCC) terpisah dari jalur catu daya untuk beban (V motor).
• Output tri-state.
• Dilengkapi dengan dioda eksternal untuk pengaman beban induktif. • Dilengkapi dengan sensor beban untuk tiap H-Bridge.
Gambar 11. EMS 2A Dual H-Bridge (Sumber: Innovative Electronics, 2011a)
Gambar 12. Bentuk fisik dan konfigurasi kaki L298N
(Sumber: STMicroelectronics, 2000)
EMS 2A Dual H-Bridge menggunakan IC (Intergrated Circuit) L298N sebagai driver motor. L298N akan secara otomatis mengubah arah gerak motor sesuai dengan perintah yang diterimanya. IC L298N memiliki 15 kaki yang memiliki fungsi seperti pada Gambar 12. Modul EMS 2A Dual H-Bridge juga dilengkapi dengan komponen ESC2B yang berfungsi sebagai dioda penyearah.
2.4.11 EMS 5A H-BRIDGE
EMS 5A H-Bridge (Gambar 13) merupakan driver H-Bridge yang didesain untuk menghasilkan drive 2 arah dengan arus kontinu hingga 5 Ampere pada tegangan 5 Volt hingga 40 Volt. Modul ini memiliki kemampuan yang mirip dengan EMS 2A Dual H-Bridge dan adanya tambahan kemampuan pada arus yang dapat dialirkan lebih besar. Perbedaan modul ini dengan EMS 2A Dual H-Bridge adalah pada kemampuan menggerakkan beban. EMS 5A H-Bridge hanya dapat menggerakkan 1 beban, sedangkan EMS 2A Dual H-Bridge dapat menggerakkan 2 beban sekaligus. Spesifikasi EMS 5A H-Bridge yang berbeda dengan EMS 2A Dual H-Bridge adalah (Innovative Electronics, 2009b) : • Frekuensi PWM sampai dengan 10 kHz,
• Active current limiting,
• Proteksi hubungan singkat, • Proteksi overtemperature, • UnderVoltage shutdown.
Gambar 13. EMS 5A H-Bridge (Sumber: Innovative Electronic,2011b)
Modul ini menggunakan IC MC33887VW (Gambar 14) sebagai
H-Bridge (saklar otomatis). Kemampuan EMS 5A H-H-Bridge didasarkan pada
switching rectifier agar modul EMS5A H-Bridge dapat melakukan switching
secara cepat.
Gambar 14.IC MC33887VW (Sumber: Freescale Semiconductor, 2005)
Gambar 15. Switching rectifier GI821 (Sumber: Vishay Intertechnology Inc, 2005)
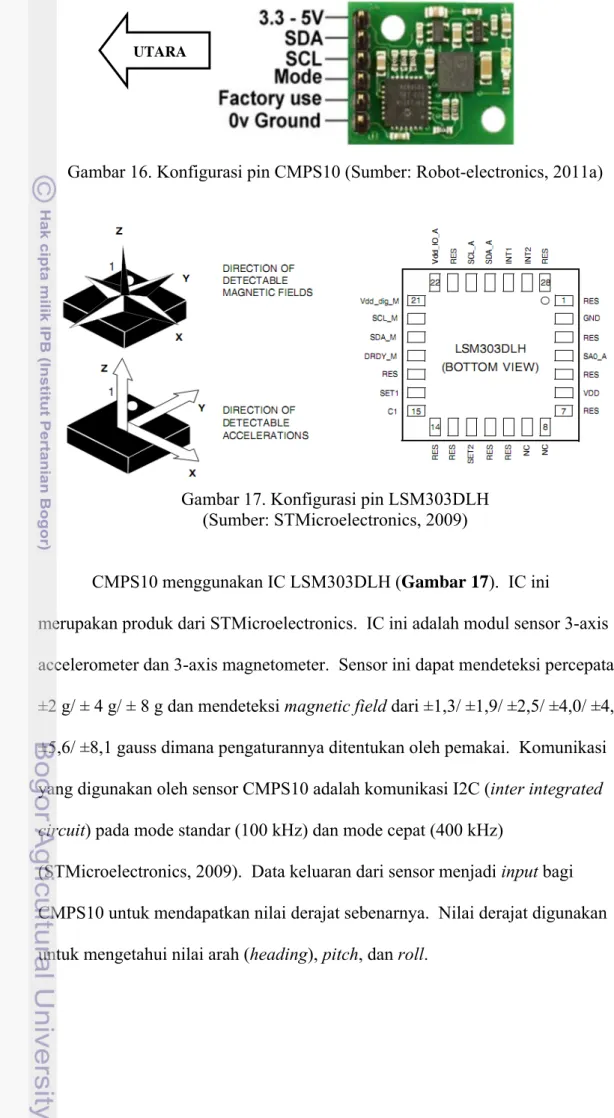
2.4.12 Kompas Digital CMPS10
Kompas digital CMPS10 (Gambar 16) merupakan salah satu produk yang dihasilkan Devantech Ltd. CMPS10 biasa digunakan dalam aplikasi robot untuk sistem navigasi. CMPS10 menggunakan 3-axis magnetometer dan 3-axis
accelerometer untuk mengetahui derajat posisi dan derajat kemiringan. CMPS10 menghasilkan nilai digital yang merepresentasikan derajat arah mata angin dengan arah utara bernilai 0°. CMPS10 menghasilkan nilai 0-3599 untuk
merepresentasikan derajat 0-359.9 atau 0-255 untuk 0-360 derajat. Selain mendapatkan nilai arah, CMPS10 juga dapat memberikan nilai derajat dari pitch dan roll. Kelebihan yang dimiliki oleh CMPS10 adalah adanya pilihan untuk mengetahui nilai accelerometer dan magnetometer. Nilai yang keluar merupakan nilai kasar (raw) dari sensor (Robot-electronics, 2011a).
Gambar 16. Konfigurasi pin CMPS10 (Sumber: Robot-electronics, 2011a)
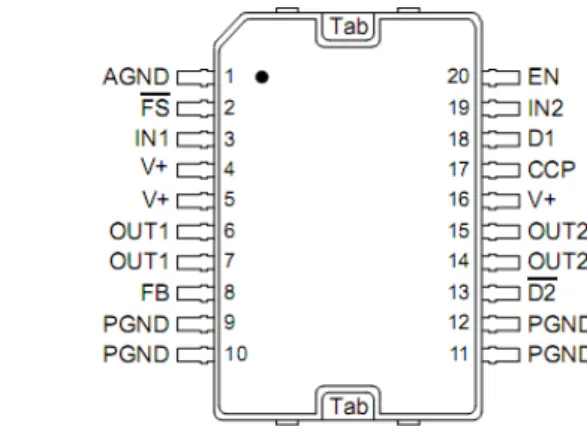
Gambar 17. Konfigurasi pin LSM303DLH (Sumber: STMicroelectronics, 2009)
CMPS10 menggunakan IC LSM303DLH (Gambar 17). IC ini
merupakan produk dari STMicroelectronics. IC ini adalah modul sensor 3-axis accelerometer dan 3-axis magnetometer. Sensor ini dapat mendeteksi percepatan ±2 g/ ± 4 g/ ± 8 g dan mendeteksi magnetic field dari ±1,3/ ±1,9/ ±2,5/ ±4,0/ ±4,7/ ±5,6/ ±8,1 gauss dimana pengaturannya ditentukan oleh pemakai. Komunikasi yang digunakan oleh sensor CMPS10 adalah komunikasi I2C (inter integrated
circuit) pada mode standar (100 kHz) dan mode cepat (400 kHz)
(STMicroelectronics, 2009). Data keluaran dari sensor menjadi input bagi CMPS10 untuk mendapatkan nilai derajat sebenarnya. Nilai derajat digunakan untuk mengetahui nilai arah (heading), pitch, dan roll.
Modul kompas digital hanya membutuhkan tegangan sebesar 5 Volt dengan arus 25 mA. Ada tiga cara untuk memperoleh informasi arah dari modul kompas digital yaitu pembacaan sinyal PWM (Pulse Width Modulation),
pembacaan data interface I2C, dan penggunaan komunikasi serial (Robot-electronics, 2011b).
Pembacaan data arah dengan I2C dilakukan dengan membaca bentuk data serial. Pada mode 8 bit, arah utara ditunjukkan dengan data 0 atau 255. Apabila modul kompas menggunakan mode 8 bit berarti kompas memiliki resolusi
1,40625 derajat/bit. Pada mode 16 bit, resolusi yang dimiliki oleh modul kompas semakin bagus yaitu 0,1 derajat (Robot-electronics, 2011b). Pembacaan data dilakukan dengan I2C communication protocol (Gambar 18).
Gambar 18. I2C communication protocol (Sumber:Robot-electronics, 2011c) I2C communication protocol dimulai dengan mengirimkan start bit,
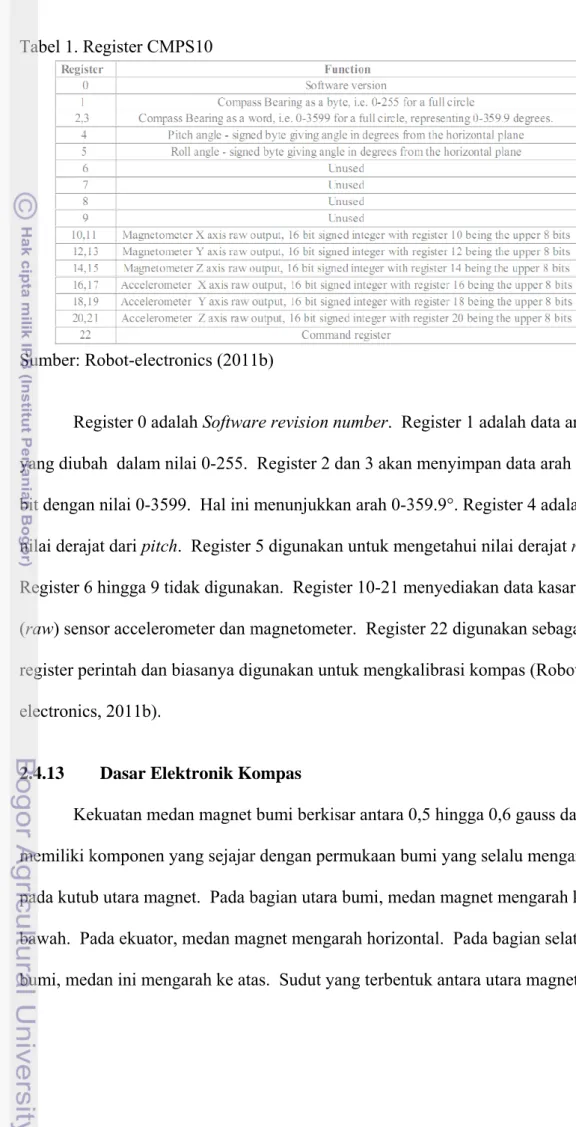
penulisan alamat modul digital compass dengan read/write low (0xC0), kemudian nomor register yang akan dibaca. Selanjutnya diikuti dengan start bit lagi dan penulisan alamat modul digital compass dengan read/write high (0xC1). Pengguna dapat memilih mode register yang digunakan yaitu mode pembacaan satu register atau dua register (8 bit atau 16 bit). Pada register 16 bit, yang pertama kali dibaca adalah high byte (Robot-electronics, 2011b). CMPS10 memiliki 23 register sesuai Tabel 1.
Tabel 1. R Sumber: R Re yang diub bit dengan nilai deraj Register 6 (raw) sens register pe electronic 2.4.13 Ke memiliki k pada kutub bawah. Pa bumi, med Register CM Robot-electr egister 0 ada ah dalam n n nilai 0-359 at dari pitch 6 hingga 9 ti sor accelero erintah dan s, 2011b). Dasar Ele ekuatan med komponen y b utara mag ada ekuator dan ini men
MPS10 ronics (201 alah Softwar nilai 0-255. 99. Hal ini h. Register idak diguna ometer dan m biasanya di ektronik K dan magnet yang sejajar gnet. Pada b r, medan ma ngarah ke ata 1b) re revision Register 2 menunjukk 5 digunaka akan. Regis magnetome igunakan un Kompas bumi berki r dengan pe bagian utara agnet menga as. Sudut y number. R dan 3 akan kan arah 0-3 an untuk me ster 10-21 m eter. Registe ntuk mengk isar antara 0 ermukaan bu a bumi, med arah horizo yang terbent Register 1 ad menyimpan 359.9°. Regi engetahui ni menyediakan er 22 digun alibrasi kom 0,5 hingga 0 umi yang se dan magnet ntal. Pada b tuk antara u dalah data ar n data arah ister 4 adala ilai derajat r n data kasar nakan sebaga mpas (Robo 0,6 gauss da elalu menga mengarah k bagian selat utara magne rah 16 ah roll. r ai ot-an arah ke tan t
bumi dan utara geografis dinamakan dengan sudut inklinasi. Sudut lain antara utara magnet bumi dengan utara geografis didefinisikan sebagai sudut deklinasi dengan rentang ± 20° tergantung lokasi geografisnya.
Tilt compensated electronic compass system memerlukan sebuah sensor
magnet 3 axis dan sensor accelerometer 3 axis (STMicroelectronics, 2010). Accelerometer digunakan untuk mengukur sudut kemiringan dari pitch dan roll untuk tilt compensation. Sensor magnet digunakan untuk mengukur medan magnet bumi dan kemudian untuk menentukan sudut heading yang mengarah ke utara magnet. Jikalau heading yang mengarah pada utara geografis diperlukan, sudut deklinasi pada lokasi geografis tersebut perlu dikompensasi ke magnetic
heading.
Gambar 19 memperlihatkan 6 degree of freedom pada sebuah alat. Xb/ Yb/ Zb merupakan forward (maju)/ right (kanan)/ down (turun) berdasarkan kaidah tangan kanan. Tiga sudut sikap (attitude) direferensikan dari bidang datar lokal dimana tegak lurus dengan gravitasi bumi.
Gambar 19. 6 Degree of freedom (Sumber: Luque dan Donha, 2008) Surge/Heading Roll Heave Yaw Sway Pitch
Heading (Ψ) didefinisikan sebagai sudut yang terbentuk antara sumbu Xb dengan utara magnet pada bidang datar yang diukur searah jarum jam ketika melihat alat dari atas (STMicroelectronics, 2010).
Pitch (ρ) didefinisikan dari sudut antara Xb axis dan bidang datar
(STMicroelectronics, 2010). Jikalau kita mengasumsikan bahwa resolusi sudut
pitch adalah 0,1°, maka sudutnya akan bergerak dari 0° – +179,9° ketika berputar
pada sumbu Yb dengan axis Xb bergerak ke atas dari permukaan datar dan tetap berputar dari posisi 90° kembali ke permukaan datar. Sudut pitch akan bergerak dari 0° – -180° ketika Xb berputar ke bawah pada sumbu Yb dari permukaan datar dan tetap bergerak dari posisi vertikal (-90°) kembali lagi ke permukaan datar. Contohnya berada pada Gambar 20.
Gambar 20. Gerakan pitch (Sumber: STMicroelectronics, 2010)
Roll (γ) merupakan sudut yang dibentuk dari sumbu Yb dengan bidang datar (STMicroelectronics, 2010). Ketika alat diputar pada sumbu Xb dengan Yb bergerak ke bawah, nilai roll akan berubah positif dan semakin bertambah
Gambar 21. Gerakan roll (Sumber: STMicroelectronics, 2010)
2.4.14 Sistem Kompas Elektronik
Gambar 22 memperlihatkan diagram blok tentang sistem kompas elektronik. Mikrokontroler digunakan untuk mengumpulkan data kasar (raw) axis accelerometer untuk kalkulasi pitch dan roll dan mengumpulkan data kasar 3-axis magnetic sensor untuk kalkulasi heading. Prosedur berikut digunakan untuk membangun sistem kompas elektronik agar bisa bekerja.
• Desain hardware untuk memastikan mikrokontroler mendapatkan data kasar yang bersih dari accelerometer dan sensor magnetik.
• Kalibrasi accelerometer untuk mendapatkan parameter yang digunakan untuk merubah data kasar accelerometer menjadi nilai yang sudah dinormalisasi untuk kalkulasi pitch dan roll.
• Kalibrasi sensor magnetik untuk mendapatkan parameter yang digunakan untuk merubah data kasar sensor magnetik menjadi nilai yang sudah dinormalisasi untuk kalkulasi heading.
• Tes kemampuan sistem kompas elektronik. Roll = -90° Roll = -150° Roll = -180° Roll = -Roll = +150° Roll = +90° Roll = +30° Yb Roll = 0° Roll = +30° Xb
Akurasi da Tabel 2. A Sumber: S 2.4.15 Xb mengguna sumbu pen menjadi ca untuk mem badan alat Ax adalah pen tanda dari Gambar 2 itu, Ax=Ay Gamb ari heading Akurasi dari STMicroelec Kalkulasi b, Yb, Zb m akan kaidah ngindera (se atatan bahw mbuat sumb t. x, Ay, Az ada ngukuran da pengukuran 23, Xb dan y=0 dan Az= ar 22. Diag (STM , pitch, dan i heading, p ctronics (20 i pitch dan merupakan su h tangan kan ensing axes wa tanda YM bu penginde alah penguk ata kasar se n baku sens Yb pada po =+1g. Mx d gram blok si Microelectro roll dapat d itch dan rol
010) roll umbu badan nan (Gamba ) dari accel M dan ZM da era memilik kuran data k nsor magne sor pada 6 p osisi datar, Z dan My bisa istem komp onics, 2010) dilihat pada ll n alat (devic ar 23). XA, erometer da ari pengukur ki arah yang kasar accele etik. Tabel posisi tetap. Zb mengara bernilai po as elektroni ) a tabel berik ce body axe ,M, YA,M, ZA an sensor m ran sensor p sama sesua erometer. M 3 memperli Sebagai co ah ke bawah sitif dan ata
ik kut: es) dengan A,M adalah magnetik. Pe perlu dibalik ai dengan su Mx, My, Mz ihatkan defi ontoh pada h. Oleh kare au negatif, erlu k umbu inisi ena
sedangkan Mz bernilai positif jika lokasinya berada pada belahan bumi bagian
utara.
Gambar 23. Sistem koordinat kompas elektronik (Sumber: STMicroelectronics, 2010)
Tabel 3. Definisi tanda pengukuran baku sensor LSM303DLH
Sumber: STMicroelectronics (2010)
Beberapa prosedur rotasi dilakukan untuk merotasi alat tersebut dari posisi Xb, Yb, dan Zb menuju posisi X’b, Y’b, dan Z’b. Perbedaan prosedur rotasi akan menghasilkan matriks rotasi yang berbeda. Pertama, alat diputar pada sudut tertentu (Ψ) di sumbu Z searah jarum jam. Kemudian alat diputar pada sudut tertentu (ρ) di sumbu Y dengan Xb bergerak ke atas. Langkah terakhir, alat diputar pada sudut γ di sumbu X dengan Yb bergerak ke bawah. Sumbu 3D alat berubah dari Xb, Yb, dan Zb menjadi X’b, Y’b, dan Z’b (Gambar 24).
Gambar 24. Prosedur rotasi (Sumber: STMicroelectronics, 2010)
Matriks tiap rotasi di atas dapat disusun sebagai berikut
Ψ cosΨ sinΨ 0 sinΨ cosΨ 0 0 0 1 cos 0 sin 0 1 0 sin 0 cos ... (2) 1 0 0 0 cos sin 0 sin cos
Hubungan antara X’b, Y’b, Z’b dan Xb,Yb, Zb ialah
′ ′
′ Ψ
... (3)
cos cosΨ cos sinΨ sin
cosΨ sin sin cos sinΨ cos cosΨ sin sin sin Ψ cos sin cosΨ sin cos sin sinΨ sin cosΨ sin cos sin Ψ cos cos
Pada bidang datar, Xb = Yb = 0, Zb = +1g. Pada X’b/ Y’b/ Z’b, pengukuran data kasar accelerometer LSM303DLH adalah Ax, Ay, Az dimana
bernilai signed integer. Ax1, Ay1, Az1 diasumsikan sebagai nilai yang
dinormalisasikan setelah memasukkan parameter kalibrasi accelerometer ke dalam Ax, Ay, dan Az. Jadi Ax1, Ay1, Az1 menjadi nilai floating kurang dari 1 pada
pengertian g (gravitasi bumi), dan akar kuadrat dari jumlah kuadrat dari nilai Ax1,
Ax1 Ay1 Az1
cos ρ cos Ψ cos ρ sin Ψ sin ρ
cos Ψ sin ρ sin γ cos γ sin Ψ cos γ cos Ψ sin ρ sin γ sin Ψ cos ρ sin γ
cos Ψ sin ρ cos γ sin γ sin Ψ sin γ cos Ψ sin ρ cos γ sin Ψ cos ρ cos γ
0 0
1 (4)
Oleh karena itu, pitch dan roll dapat dikalkulasi sebagai berikut:
Pitch = ρ = arcsin(-Ax1) ... (5)
Roll = γ = arcsin(Ay1/cos ρ) ... (6)
2.4.16 Kalkulasi heading
Ketika alat diletakkan mendatar, sudut pitch dan roll akan bernilai 0°. Sudut heading dapat ditentukan sesuai dengan Gambar 25.
Gambar 25. Penentuan sudut heading (Sumber:STMicroelectronics, 2010)
Medan magnet lokal bumi (local earth magnetic field) H memiliki komponen tetap Hh pada bidang datar yang mengarah ke utara magnet bumi. Komponen ini dapat dihitung oleh sumbu pengindera sensor magnet Xm dan Ym yang dinamakan Xh dan Yh. Sudut heading dikalkulasi sebagai berikut:
tan ………(7)
Pada Gambar 25, ketika sumbu Xb sejajar dengan Hh dimana Hh
mengarah ke arah utara magnet, maka Xh=max dan Yh=0 sehingga heading = 0°. Alat diputar searah jarum jam pada bidang datar akan mengakibatkan sudut
Jikalau kita tetap memutarnya hingga Xh=min dan Yh=0 maka heading=180° dan seterusnya.
Pada kalkulasi heading, pengukuran 3-axis sensor magnetik perlu
dinormalisasi dengan menerapkan parameter kalibrasi sensor magnetik dan digambarkan pada bidang datar dengan kompensasi kemiringan (Gambar 26).
Gambar 26. Kalkulasi heading (Sumber: STMicroelectronics, 2010)
Jika alat berputar dari Xb/ Yb/ Zb ke X”b/ Y”b/ Z”b oleh rotasi sudut roll
diikuti oleh rotasi sudut pitch, maka "
" "
cos 0 sin
sin sin cos sin cos
cos sin sin cos cos
" "
" ………(8) Kita mengasumsikan Mx1, My1, Mz1 sebagai pengukuran sensor magnetik
yang dinormalisasikan setelah menerapkan koreksi kalibrasi parameter ke dalam pengukuran kasar data sensor magnetik Mx, My, Mz pada posisi baru X”b, Y”b,
Z”b. Mx, My, Mz bertipe signed integer, sedangkan Mx1, My1, Mz1 merupakan nilai
floating dengan nilai kurang dari 1 pada pengertian kekuatan medan magnet.
Akar kuadrat dari jumlah kuadrat masing-masing nilai harus sama dengan 1 ketika tidak ada gangguan eksternal medan magnet. Pengimbangan kemiringan
cos sin ... (9) sin γ sin ρ cos γ sin cos ... (10)
cos sin sin cos cos ... (11) Oleh karena itu,
Ψ tan untuk Mx2 > 0 dan My2 >= 0
180° tan untuk Mx2 < 0
360° tan untuk Mx2 > 0 dan My2 <= 0
= 90° untuk Mx2 = 0 dan My2 < 0
= 270° untuk Mx2 = 0 dan My2 > 0
2.4.17 Kompensasi kemiringan
Andaikata alatnya miring, maka sudut pitch dan roll tidak sama dengan 0° seperti yang terlihat pada Gambar 27. Sudut pitch dan roll dapat diukur oleh 3-axis accelerometer. Oleh karena itu, pengukuran sensor magnetik Xm, Ym, dan Zm
perlu dilakukan untuk memperoleh Xh, Yh, dan Zh seperti pada persamaan berikut:
Xh=Xmcos(Pitch) + Zm Sin(Pitch) ... (12)
Yh=Xmsin(Roll)sin(Pitch) + Ymcos(Roll) - Zmsin(Roll)cos(Pitch)
Kemudian mempergunakannya untuk persamaan di atas untuk kalkulasi heading.
2.4.18 Hitachi H48C 3-Axis Accelerometer
Hitachi H48C merupakan modul terintegrasi yang dapat mendeteksi gaya gravitasi pada tiga sumbu (X, Y, dan Z) sebesar kurang lebih 3 g (gravitation
force). Modul ini terdiri dari regulator pada papan integrasi yang meregulasikan
tegangan sebesar 3,3 Volt ke H48C, analog signal conditioning, dan MCP3204 (4 kanal, 12 bit) yang merupakan ADC (analog-to-digital converter) untuk membaca tegangan keluaran dari H48C. Semua komponen terintegrasi pada satu papan modul dengan ukuran 17,8 mm x 20,3 mm (Parallax, 2007). Konfigurasi pin modul H48C dapat dilihat pada Gambar 28.
Pembacaan g-force (gaya gravitasi) pada H48C dilakukan dengan
membaca tegangan keluaran dari sumbu tersebut dan mengkalkulasinya dengan formula berikut:
,
, ... (13)
Atau dapat disederhanakan menjadi
0,0022 ... (14)
Gambar 28. Konfigurasi pin modul H48C (Sumber: Parallax (2007))
2.4.19 Sensor suhu D1820
Sensor Suhu D1820 (Gambar 29) merupakan sensor suhu digital yang diproduksi oleh Dallas Semiconductor. Sensor ini menggunakan komunikasi
9 bit nilai digital. Sensor ini dapat mengukur suhu dengan rentang -55 °C hingga +125 °C dengan resolusi 0,5°C. Sensor ini memerlukan pull up resistor sebesar 4,7 kΩ agar dapat mengirim data ke mikrokontroler.
Gambar 29. Bentuk fisik dan konfigurasi kaki D1820
2.5 PEMROGRAMAN
Pemrograman untuk aplikasi Mini ROV ini terdiri dari dua buah program yaitu GUI (Graphical User Interface) dan mikrokontroler. Pemrograman GUI mini ROV dilakukan dengan menggunakan Borland Delphi 7. Piranti lunak ini dikembangkan oleh perusahaan Borland Software Corporation. Bahasa
pemrograman yang digunakan pada program ini adalah bahasa objek Pascal berbasis OOP (Object Oriented Programming). Program Delphi 7 memiliki kelebihan meliputi : mudah untuk membaca kode, kompilasinya cepat, dan penggunaan multiple unit files untuk pemrograman modular. Program ini bekerja dalam IDE (integrated development environment) sehingga pemrogram semakin mudah untuk membuat suatu program yang berbasis GUI (graphical interface
unit) (Borland, 2003).
Penulisan dan pemrograman mikrokontroler dilakukan secara In System
mikrokontroler adalah CodeVision AVR C Compiler Versi 2.05. Bahasa yang digunakan adalah bahasa C. Pemrograman mikrokontroler dilakukan dengan menggunakan piranti lunak In-System Programmer Atmel AVRProg (AVR910) yang terintegrasi di dalam program CodeVision AVR.