Perancangan dan Implementasi Image-Based Visual
Servoing pada Robot Kartesian 2 Derajat Kebebasan
Berbasis PLC
Syaqyun Nadzor
Jurusan Teknik Elektro, Fakultas Teknologi Industri – Institut Teknologi Sepuluh Nopember Surabaya
Abstrak ̶ Robot-robot industri memiliki kelemahan
di berbagai lingkungan kerja di mana penempatan objek kerja tidak bisa dikontrol dengan akurat. Ini dikarenakan kurangnya kemampuan sensor joint pada robot-robot tersebut. Kalaupun dikehendaki integrasi sensor untuk meningkatkan akurasinya maka dibutuhkan biaya yang tinggi. Alternatifnya,
digunakan sebuah umpanbalik visual untuk
mengingkatkan akurasi keseluruhan sistem atau yang dikenal dengan visual servoing.
Dalam penelitian ini dirancang sebuah
sistem berumpanbalik visual yang hanya
mendefinisikan error sebagai fungsi dari pergeseran fitur yang dijejak yaitu Image-Based Visual Servoing (IBVS). Perancangan ini diimplementasikan pada robot kartesian gantry dua derajat kebebasan dengan konfigurasi kamera eye-in-hand untuk keperluan pick and place. Fitur yang dijejak (feature
tracking) oleh sensor visual adalah posisi garis tepi
dari objek kerja. Dengan menggunakan metode pengaturan On-Off, dari percobaan diperoleh hasil bahwa sistem ini memiliki overshoot sebesar 6,6mm dan error keadaan tunak sebesar ± 3,34 mm.
Kata kunci - image-based visual servoing, robot kartesian gantry, feature tracking.
I. PENDAHULUAN
Robot-robot yang ada saat ini sebagian besar bekerja di lingkungan pabrik. Jumlah ini terus bertambah, namun robot memiliki kelemahan di berbagai area kerja di mana lingkungan kerja dan penempatan objeknya tidak bisa dikontrol dengan akurat. Batasan ini dikarenakan kurangnya kemampuan sensor pada robot-robot komersial yang ada saat ini. Telah lama diketahui bahwa integrasi sensor adalah hal yang sangat mendasar untuk meningkatkan versatility domain aplikasi dari robot namun hingga saat ini belum tampak bahwa hal ini efektif dalam biaya untuk sebagian besar aplikasi robot dalam dunia manufaktur. Batasan baru dalam robotika, yang beroperasi dalam dunia sehari-hari, menyediakan dorongan baru untuk riset ini. Berbeda dengan aplikasi manufaktur, tidak
efektif untuk memanipulasi ulang dunia kita sehingga cocok dengan robot.
Vision atau penglihatan adalah sebuah sensor robotik yang sangat berguna karena bisa menyerupai indera pengelihatan manusia dan memungkinkan untuk mengindera benda tanpa menyentuhnya. Kontroler robot dengan sistem pengelihatan yang terintegrasi kini telah tersedia dari berbagai vendor. Manipulasi dan penginderaan visual dikombinasikan dalam sebuah struktur loop-terbuka, „melihat‟ kemudian „bergerak‟. Akurasi dari operasi tersebut tergantung langsung pada akurasi sensor visual dan end-effector.
Alternatif untuk meningkatkan akurasinya adalah dengan menggunakan pengaturan loop tertutup dengan umpanbalik visual yang akan meningkatkan akurasi dari keseluruhan sistem. Dengan kata lain, machine vision mampu menyediakan pengaturan posisi dengan loop tertutup untuk end-effector robot yang dikenal dengan visual servoing.
Makalah ini tersusun dari Bagian I yang merupakan pendahuluan. Bagian II adalah penjelasan singkat tentang visual servoing pada robot kartesian. Bagian III menjelaskan perancangan sistem. Bagian IV membahas pengujian dan implementasi. Bagian V menjelaskan beberapa kesimpulan akhir dari penelitian ini.
II. IBVS PADA ROBOT KARTESIAN
Visual servoing adalah istilah yang digunakan untuk sistem pengaturan loop tertutup di mana umpanbalik utama sistem diperoleh dari sensor visual atau kamera. Berdasarkan ekstraksi fiturnya dibagi menjadi 2 yaitu, Image Based Visual Servoing dan Position Based Visual Servoing. Perbedaan utamanya adalah bahwa PBVS menggunakan informasi ekstraksi fitur yang melibatkan perspektif kedalaman atau jarak frontal, sedangkan IBVS langsung mendefinisikan error sebagai fungsi pergeseran fitur yang dijejak terhadap posisi dan orientasi yang diinginkan.
A. Image Based Visual Servoing
Berdasarkan konfigurasi kameranya dibagi menjadi: eye-in-hand (kamera berada di end-effector), fixed camera (kamera diam mengamati ruang kerja
robot keseluruhan) atau eye-to-hand, dan kombinasi keduanya. Baik menggunakan konfigurasi eye-in-hand ataupun fixed camera, gerakan dari manipulator menyebabkan perubahan terhadap citra yang diamati oleh sistem visual. Sehingga, spesifikasi tugas IBVS melibatkan penentuan fungsi error e yang cocok, sedemikian hingga ketika tugas telah selesai e = 0. Ini bisa dilakukan dengan persamaan proyeksi, atau menggunakan cara “teaching by showing”, di mana robot digerakkan ke sebuah posisi ahir yang diharapkan dan citra yang terekam pada posisi tersebut digunakan untuk menghitung vektor dari parameter fitur yang diinginkan, fd. Jika tugasnya didefinisikan terhdap objek yang bergerak, error, e, akan menjadi fungsi, tidak hanya dari pose dari end-effector, tapi juga dari pose objek yang bergerak.
Meskipun error, e, didefinisikan pada ruang parameter citra, input dari kontroler manipulator didefinisikan oleh koordinat joint atau koordinat ruang tugas. Karenanya, perlu diketahui hubungan antara perubahan parameter fitur terhadap perubahan posisi dari robot.
Tipe Image Based Visual Servoing yang paling umum adalah dengan konfigurasi kamera eye-in-hand. Kamera dilekatkan secara tegar pada end effector dari robot. Transformasi antara kamera dan kerangka koordinat end effector biasanya diketahui sebelumnya atau apriori. Sebuah tugas khasnya adalah untuk mengontrol kamera sehingga fitur citra yang di-track mencapai sebuah posisi citra yang telah didefinisikan sebelumnya. Baik posisi sekarang maupun posisi yang diinginkan dari fitur dalam citra seringkali berada dalam citra tersebut saat serangkaian visual servoing dimulai. Banyak sistem yang memakai titik-titik acuan khusus untuk keperluan tracking[3].
Fitur citra dapat diperoleh menggunakan algoritma segmentasi citra digital, yang diantaranya adalah pendeteksian tepi dan garis menggunakan konvolusi dengan kernel sobel. Kernel Sobel sering digunakan untuk mendeteksi tepi objek dari satu sisi tertentu sehingga bisa digunakan untuk mendeteksi salah satu garis tepi objek dan memungkinkan tepi tersebut tidak tertutup oleh end-effector terhadap kamera saat proses tracking. Persamaan (1) menunjukkan kernel Sobel untuk deteksi garis horizontal.
𝐻 =
−1 −2 −1
0 0 0
1 2 1
(1)
B. Robot Kartesian Gantry
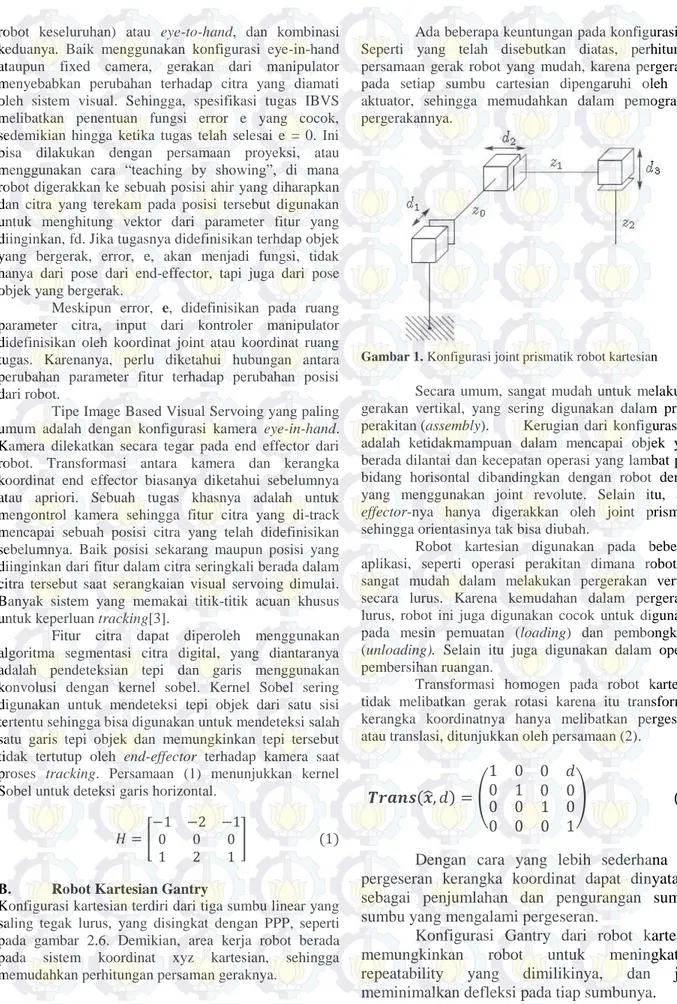
Konfigurasi kartesian terdiri dari tiga sumbu linear yang saling tegak lurus, yang disingkat dengan PPP, seperti pada gambar 2.6. Demikian, area kerja robot berada pada sistem koordinat xyz kartesian, sehingga memudahkan perhitungan persaman geraknya.
Ada beberapa keuntungan pada konfigurasi ini. Seperti yang telah disebutkan diatas, perhitungan persamaan gerak robot yang mudah, karena pergerakan pada setiap sumbu cartesian dipengaruhi oleh satu aktuator, sehingga memudahkan dalam pemograman pergerakannya.
Gambar 1. Konfigurasi joint prismatik robot kartesian Secara umum, sangat mudah untuk melakukan gerakan vertikal, yang sering digunakan dalam proses perakitan (assembly). Kerugian dari konfigurasi ini adalah ketidakmampuan dalam mencapai objek yang berada dilantai dan kecepatan operasi yang lambat pada bidang horisontal dibandingkan dengan robot dengan yang menggunakan joint revolute. Selain itu, end-effector-nya hanya digerakkan oleh joint prismatik sehingga orientasinya tak bisa diubah.
Robot kartesian digunakan pada beberapa aplikasi, seperti operasi perakitan dimana robot ini sangat mudah dalam melakukan pergerakan vertikal secara lurus. Karena kemudahan dalam pergerakan lurus, robot ini juga digunakan cocok untuk digunakan pada mesin pemuatan (loading) dan pembongkaran (unloading). Selain itu juga digunakan dalam operasi pembersihan ruangan.
Transformasi homogen pada robot kartesian tidak melibatkan gerak rotasi karena itu transformasi kerangka koordinatnya hanya melibatkan pergeseran atau translasi, ditunjukkan oleh persamaan (2).
𝑻𝒓𝒂𝒏𝒔 𝒙
, 𝑑 =
1 0
0 1
0 𝑑
0
0
0 0
0 0
1 0
0 1
(2)
Dengan cara yang lebih sederhana lagi
pergeseran kerangka koordinat dapat dinyatakan
sebagai penjumlahan dan pengurangan
sumbu-sumbu yang mengalami pergeseran.
Konfigurasi Gantry dari robot kartesian
memungkinkan
robot
untuk
meningkatkan
repeatability
yang
dimilikinya,
dan
juga
meminimalkan defleksi pada tiap sumbunya.
III. PERANCANGAN SISTEM A. Arsitektur Sistem IBVS
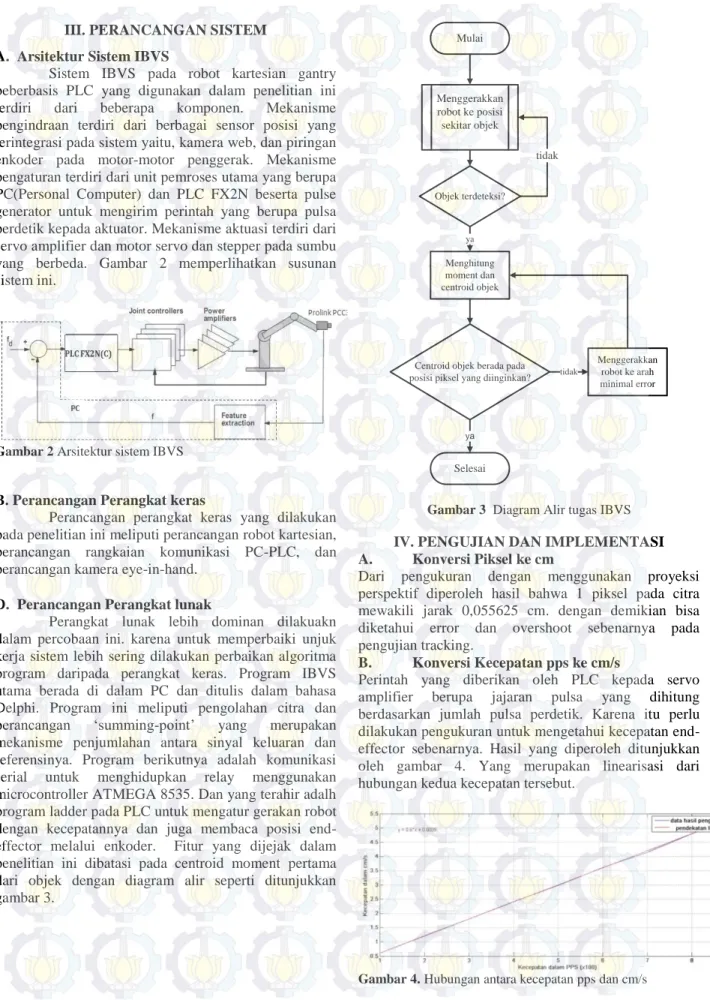
Sistem IBVS pada robot kartesian gantry beberbasis PLC yang digunakan dalam penelitian ini terdiri dari beberapa komponen. Mekanisme pengindraan terdiri dari berbagai sensor posisi yang terintegrasi pada sistem yaitu, kamera web, dan piringan enkoder pada motor-motor penggerak. Mekanisme pengaturan terdiri dari unit pemroses utama yang berupa PC(Personal Computer) dan PLC FX2N beserta pulse generator untuk mengirim perintah yang berupa pulsa perdetik kepada aktuator. Mekanisme aktuasi terdiri dari servo amplifier dan motor servo dan stepper pada sumbu yang berbeda. Gambar 2 memperlihatkan susunan sistem ini.
Gambar 2 Arsitektur sistem IBVS
B. Perancangan Perangkat keras
Perancangan perangkat keras yang dilakukan pada penelitian ini meliputi perancangan robot kartesian, perancangan rangkaian komunikasi PC-PLC, dan perancangan kamera eye-in-hand.
D. Perancangan Perangkat lunak
Perangkat lunak lebih dominan dilakuakn dalam percobaan ini. karena untuk memperbaiki unjuk kerja sistem lebih sering dilakukan perbaikan algoritma program daripada perangkat keras. Program IBVS utama berada di dalam PC dan ditulis dalam bahasa Delphi. Program ini meliputi pengolahan citra dan perancangan „summing-point‟ yang merupakan mekanisme penjumlahan antara sinyal keluaran dan referensinya. Program berikutnya adalah komunikasi serial untuk menghidupkan relay menggunakan microcontroller ATMEGA 8535. Dan yang terahir adalh program ladder pada PLC untuk mengatur gerakan robot dengan kecepatannya dan juga membaca posisi end-effector melalui enkoder. Fitur yang dijejak dalam penelitian ini dibatasi pada centroid moment pertama dari objek dengan diagram alir seperti ditunjukkan gambar 3. Mulai Objek terdeteksi? tidak Menghitung moment dan centroid objek
Centroid objek berada pada posisi piksel yang diinginkan?
Menggerakkan robot ke arah minimal error Selesai ya tidak ya Menggerakkan robot ke posisi sekitar objek
Gambar 3 Diagram Alir tugas IBVS
IV. PENGUJIAN DAN IMPLEMENTASI
A. Konversi Piksel ke cm
Dari pengukuran dengan menggunakan proyeksi perspektif diperoleh hasil bahwa 1 piksel pada citra mewakili jarak 0,055625 cm. dengan demikian bisa diketahui error dan overshoot sebenarnya pada pengujian tracking.
B. Konversi Kecepatan pps ke cm/s
Perintah yang diberikan oleh PLC kepada servo amplifier berupa jajaran pulsa yang dihitung berdasarkan jumlah pulsa perdetik. Karena itu perlu dilakukan pengukuran untuk mengetahui kecepatan end-effector sebenarnya. Hasil yang diperoleh ditunjukkan oleh gambar 4. Yang merupakan linearisasi dari hubungan kedua kecepatan tersebut.
C. Pengujian Tracking dengan 1 Kecepatan
Grafik berikut (gambar 5) memperlihatkan hasil plot sinyal error dari fitur yang dijejak terhadap posisi fitur yang diinginkan dalam koordinat citra. Hal ini sesuai dengan teori bahwa error dalam IBVS didefinisikan sebagai selisih posisi dan orientasi dari fitur yang dijejak terhadap posisi fitur tersebut yang diinginkan. Sebuah tugas IBVS direpresentasikan oleh fungsi error citra.
Gambar 5. Atas, tracking 1 sumbu dengan Ess 3 piksel.
Bawah, tracking 2 sumbu untuk kecepatan yang sama
D. Pengujian Tracking dengan 2 Kecepatan
Dengan pemilihan lebih dari 1 kecepatan maka osilasi yang terjadi dapat diperkecil. Dalam percobaan ini pergerakan sumbu Y diatur dengan dua kecepatan tergantung dari besar error yang terjadi, ketika error medekati nilai minimum tertentu maka kecepatanya akan diturunkan sehingga nilai osilasi menjadi lebih kecil.
Dengan menurunkan kecepatan menjadi 170 pps untuk arah Y dan 150 pps arah X tampak bahwa osilasi dapat dihentikan. Masih ada overshoot pada tiap-tiap arah gerakan, namun sangat kecil. Pada sumbu X timbul overshoot sebesar 12 piksel atau 6.675mm. Sedangkan overshoot pada sumbu Y adalah 4 piksel atau 2.225mm.
Overshoot dalam performa tracking ini juga dipengaruhi oleh delay pada pengolahan citra dan respon relay yang digunakan untuk mengaktifkan input PLC. Dalam pengujian selanjutnya, pemilihan 2 kecepatan ini tak lagi dilakukan saat kondisi error mendekati nilai minimal tertentu. Untuk kecepatan sumbu Y, di mana oerientasi dari lengan robot menempatkannya sebagai sumbu terpanjang, kecepatan diturunkan menjadi 170 pps saat robot pertama kali mendeteksi keberadaan objek. Dengan demikian grafik error sumbu Y tak lagi seperti ditunjukkan pada gambar 4.5, namun sumbu Y menjadi lebih landai atau
memerlukan waktu yang lebih lama untuk mencapai error minimal.
Gambar 4.5. Perilaku sistem saat tracking dengan 2
kecepatan.
E. Implementasi Pick-And-Place
Implementasi ini dilakukan juga untuk membuktikan bahwa pada percobaan-percobaan selanjutnya robot benar-benar mampu mencapai kondisi tunak tanpa osilasi. Kecepatan yang digunakan sama seperti pada percobaan sebelumnya yaitu 170 pps untuk sumbu Y dan 150 pps untuk sumbu X.
(a)
(b)
Gambar 4.6. Proses pick and place, (a) pengambilan dan (b)
VI. KESIMPULAN
Dari percobaan-percobaan yang telah dilakukan pada pengerjaan studi ini, maka dapat diambil beberapa kesimpulan antara lain:
1. Penentuan nilai ambang batas kecerahan piksel adalah fase yang sangat penting karena segmentasi berbasis thresholding sangat pekan terhadap perubahan intensitas cahaya.
2. Metode pengaturan ON-OFF bisa menghilangkan osilasi pada keadaan tunak (steady state) jika kecepatan robot 150 pps untuk motor servo dan 170 pps untuk motor stepper.
3. Gerakan kamera dalam dua arah tegak lurus secara bersamaan mempengaruhi perubahan moment dan centroid yang menyebabkan seolah-olah objek yang dijejak sedang bergerak.
4. Desain IBVS ini memiliki overshoot terbesar dalam pengujian sebesar 6,6 mm
VII. REFERENSI
[1] Ahmad, Usman. 2005. Pengolahan Citra Digital & Teknik Pemrogramannya. Graha Ilmu. Yogyakarta..
[2] Hutchinson, S., Hager, G. & Corke, P. 1996. „A tutorial on visual servo control‟. IEEE Transactions on Robotics and Automation
12(5), 651–670.
[3] Kragic, Danica dan Hendrik I Crhistensen. 2001. Survey on Visual Servoing for Manipulation. Centre for Autonomous Systems, Numerical Analysis and Computer Science, Fiskartopsv. Stockholm, Sweden. [4] Modular Electrical Linear Drives OSP-E
operating instruction. Origa.
[5] Pages, Jordi. 2005. Thesis: Assisted Visual Servoing by Means of Structured Light. Computer Vision and Robotics Group, Department of Electronics, Computer science and Automatic Control, Universitat de Girona. [6] Riswandanu, Anggi. 2010. Tugas Akhir:
Deteksi Obyek menggunakan Kamera dengan Pendekatan Neural Network pada Robot Soccer. Jurusan Teknik Elektro FTI-ITS. [7] Spong, Mark W. dkk. 2004. Robot Dynamic
and Control Second Edition. John Wiley and Sons. New York ..
[8] Tobing, Yosef Sebastian. 2009. Tuags Akhir: Tracking Sistem 3 Dimensi menggunakan Kamera Stereo berbasis PC. Jurusan Teknik Elektro FTI-ITS.
[9] VEXTA STEP. Oriental General Motor Catalog 2003-2004.
[10] Waldron, Kenneth dan James Schmiedeler. 2008. Kinematics. Springer handbook of Robotics Part A-1. Springer-Verlag. Berlin Heidelberg.
[11] Wibisono, Gunawan. 2010. Tugas Akhir: Perancangan Kontroler Fuzzy Untuk Tracking Control Robot Soccer. Jurusan Teknik Elektro FTI-ITS.