Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
140
Estimasi Posisi Mobile Robot Menggunakan Metode Akar Kuadrat
Unscented Kalman Filter (AK-UKF)
Teguh Herlambang1), Reizano Amri Rasyid2), Sri Hartatik3) , Dinita Rahmalia4) 1)Program Studi Sistem Informasi Universitas Nahdlatul Ulama Surabaya (UNUSA)
2)Program Studi Sistem Informasi Universitas Nahdlatul Ulama Surabaya (UNUSA) [email protected]
3)Program Studi Pendidikan Guru Sekolah Dasar Universitas Nahdlatul Ulama Surabaya (UNUSA) [email protected]
4)Program Studi Matematika Universitas Islam Darul Ulum Lamongan [email protected]
Abstrak
Robot mobil merupakan salah satu wahana darat yang dapat digerakkan dan dideteksi keberadaannya apabila dilengkapi dengan global positioning system (GPS). Alasan utama pemakaian robot mobil untuk menggantikan fungsi manusia dalam melakukan pekerjaan yang berbahaya adalah karena robot mobil mempunyai kemampuan untuk dapat bergerak secara bebas dan mengikuti lintasan yang ada dengan posisi yang tepat. Oleh karena itu dibutuhkan suatu metode untuk mengestimasi lintasan robot mobil agar dapat dengan mudah dideteksi keberadaannya. Pada paper ini dilakukan estimasi posisi pada persamaan gerak robot mobil. Metode estimasi lintasan yang digunakan adalah metode Akar Kuadrat Unscented Kalman Filter (AK-UKF). Hasil simulasi metode AK-UKF dengan persamaan gerak mobile robot menunjukkan bahwa error yang dihasilkan kurang dari 3% baik dengan menjalankan 100, 150 dan 200 iterasi. Error terkecil didapatkan ketika membangkitkan sejumlah 200 iterasi, di mana error posisi x ialah 0.39 m, error posisi y yaitu 0.27 m dan error posisi sudut yaitu 0.011 m. Ditinjau dari perbandingan lintasan, bahwa lintasan kedua lebih akurat dari pada lintasan pertama.
Kata Kunci: Mobile Robot, AK-UKF, Estimasi Posisi
A. PENDAHULUAN
Estimasi dilakukan untuk mendapatkan satu penyelesaian masalah yang membutuhkan informasi sebelumnya sehingga bisa menentukan langkah selanjutnya dalam menyelesaikan masalah tersebut. Estimasi dilakukan karena suatu masalah terkadang dapat diselesaikan dengan menggunakan informasi atau data sebelumnya yang berhubungan dengan masalah tersebut [1]. Kalman filter merupakan suatu metode estimasi variabel keadaan dari sistem dinamik linear diskrit yang meminimumkan kovarian error estimasi [2]. Kalman filter pertama kali diperkenalkan oleh rudolph e. Kalman pada tahun 1960 yaitu tentang suatu penyelesaian pada masalah filtering data-diskrit yang linear. Padahal dalam kehidupan sehari-hari banyak permasalahan muncul bukan hanya dalam model dinamik yang linear tetapi juga muncul pada model dinamik yang nonlinear [3]. Beberapa pengembangan metode kalman filter untuk estimasi posisi yaitu Ensemble Kalman Filter (EnKF) dan Ensemble Kalman Filter Square Root (EnKF-SR) serta Fuzzy Kalman Filter (FKF) yang diterapkan pada AUV [3,4,5] dan mobile robot [6]. Selain metode EnKF dan AK-EnKF juga dikembangkan metode Unscented Kalman Filter (UKF) yang berasal dari modifikasi algoritma kalman filter dengan transformasi unscented [7]. Metode EnKF dan AK-EnKF juga dapat dikombinasikan dengan sistem kendali seperti Sliding Mode Control (SMC) [8,9], Proportional Integral Derivative (PID) [10], dan Fuzzy Sliding Mode control (FSMC) pada Autonomous Underwater Vehicle [11].
Pengembangan penerapan sistem navigasi dan panduan dengan teknik estimasi lintasan serta sistem kendali yang mengarah pada bidang robotika sangat bermanfaat bagi negara indonesia karena wahana tanpa awak banyak digunakan untuk kepentingan sipil maupun militer seperti pada misi pengintaian, pengawasan dan penjelajahan ke tempat-tempat yang berbahaya bagi manusia misalnya AUV [4,11,12], UAV serta mobile robot. Mobile robot merupakan salah satu wahana
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
141 tanpa awak yang dapat digerakkan dan dapat dilacak atau dideteksi keberadaannya apabila dilengkapi dengan Global Positioning System (GPS). Mobile robot digunakan untuk menggantikan fungsi manusia dalam melakukan pekerjaan yang berbahaya, karena memiliki kelebihan untuk dapat bergerak dan berpindah tempat secara bebas [13]. Oleh karena itu mobile robot tersebut harus mengikuti lintasan yang ada dengan posisi yang tepat, sehingga dibutuhkan suatu metode untuk mengestimasi lintasan mobile robot agar dapat dengan mudah dilacak keberadaannya. Dalam paper ini dilakukan suatu kajian mengenai implementasi metode AK-UKF pada persamaan gerak mobile robot sehingga menghasilkan error antara lintasan yang ditentukan dengan estimasi lintasan.
B. MODEL MATEMATIKA DARI MOBILE ROBOT
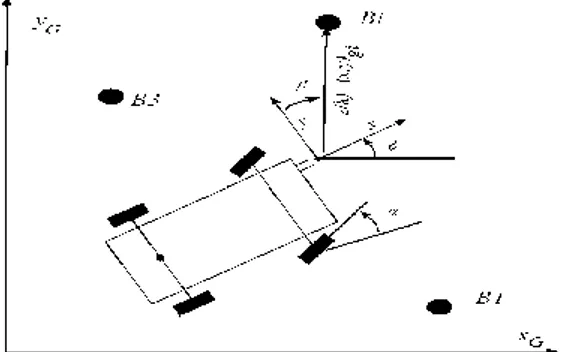
Mobile Robot atau robot mobil adalah konstruksi robot yang mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain. mobile robot yang digunakan dalam penelitian adalah mobile robot yang beroperasi di darat dan menggunakan roda bagian belakang sebagai alat untuk bergerak dan berpindah tempat. sistem robot mobil dengan alat penggerak roda bagian belakang. pada Gambar 1 menunjukkan posisi dan dimensi mobile robot [13].
Gambar 1. Gambar Model Dinamik Mobile Robot
GPS dipasang tepat pada bagian titik tengah mobil. sistem kemudi dan sudut bagian depan ditunjukkan pada Gambar 1. Dalam kasus ini data berbentuk diskrit dan sistemnya nonlinear. Persamaan sistem dinamik dari mobile robot didefinisikan sebagai berikut [13]:
(1)
Dimana
X, Y : posisi
mobile robot
pada sistem koordinat gps : posisi sudutmobile robot
: kecepatan
mobile robot
: sudut kemudi
mobile robot
l : jarak antara roda depan dengan roda belakang
a : jarak antara titik tengah mobil bagian belakang dengan posisi GPS b : jarak antara titik pusat mobil dengan posisi GPS
C. UNSCENTED KALMAN FILTER (UKF)
Unscented kalman filter merupakan perluasan dari transformasi unscented. dengan menggunakan transformasi unscented diperoleh mean dan kovarian dari model pengukuran [7]. diberikan sebuah sistem nonlinear:
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
142
Persamaan diatas menyatakan perubahan keadaan dan pengukuran. dengan
x
k variabel keadaan pada saat k, zk variabel pengukuran, uk definisikan sebagai input proses, dan vk vektornoise pada keadaan dan nk adalah vektor noise pada pengukuran sedangkan k adalah waktu diskrit.
Didefinisikan sebuah variabel keadaan tambahan,
Titik sigma dari transformasi unscented akan digunakan pada variabel tambahan ini untuk menghitung matriks sigman point yang sesuai.
Demikian pula matriks kovarian dari variabel keadaan tambahan diperoleh dari matriks kovarian dari x, v, dan n
Dimana dan adalah matrik kovarian dari noise keadaan dan noise pengukuran. Algritma unscented kalman filter dituliskan sebagai berikut (Gumilar,2011):
Inisialisasi Pada K = 0:
(3)
Untuk K = 1,2,3,..., : 1) Hitung Titik Sigma
Dimana:
2) Time-Update (Tahap Prediksi)
(4)
3) Measurement Update (Tahap Koreksi):
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
143
D. MATRIKS AKAR KUADRAT
Algoritma akar kuadrat unscented kalman filter (ak-ukf) adalah pengembangan dari algoritma ukf, di mana terdapat singular value decomposition (svd) dan matriks akar kuadrat. svd adalah suatu matriks dalam bentuk perkalian matriks diagonal yang berisi nilai-nilai singularnya, dengan matriks yang berisi vektor-vektor singular yang bersesuaian [14]. dekomposisi nilai singular merupakan teknik yang telah digunakan secara luas untuk mendekomposisikan matriks ke dalam Beberapa Matriks Komponen [1].
Jika dalam suatu matriks , terdapat matriks ortogonal , dan , maka:
(6)
dengan matriks yang entri diagonalnya
1
2
....
p
0
,p
min
m k
,
dan entri yang lain adalah nol. nilai
i
0,
i
1, 2,...,
p
disebut nilai singular dari a [15].Matriks akar kudrat adalah akar kuadrat dari matriks definit positif a, yaitu
1/ 2 1/ 2 1 k T T i i i i
A
e e
U
U
(7)Di mana 1/ 2 adalah matriks diagonal dengan element diagonalnya
i dengan 1 2
0
0
0
0
0
0
k k k
dan
i
0
. variabel
1,
2, ...,
k adalah nilai eigen dari a.E. HASIL SIMULASI DAN ANALISA
Pada penelitian ini sistem navigasi dan panduan mobile robot menggunakan metode AK-UKF dengan iterasi 100, 150 dan 200 pada dua lintasan. Selanjutnya dilakukan perbandingan lintasan dengan iterasi 100, 150 dan 200.
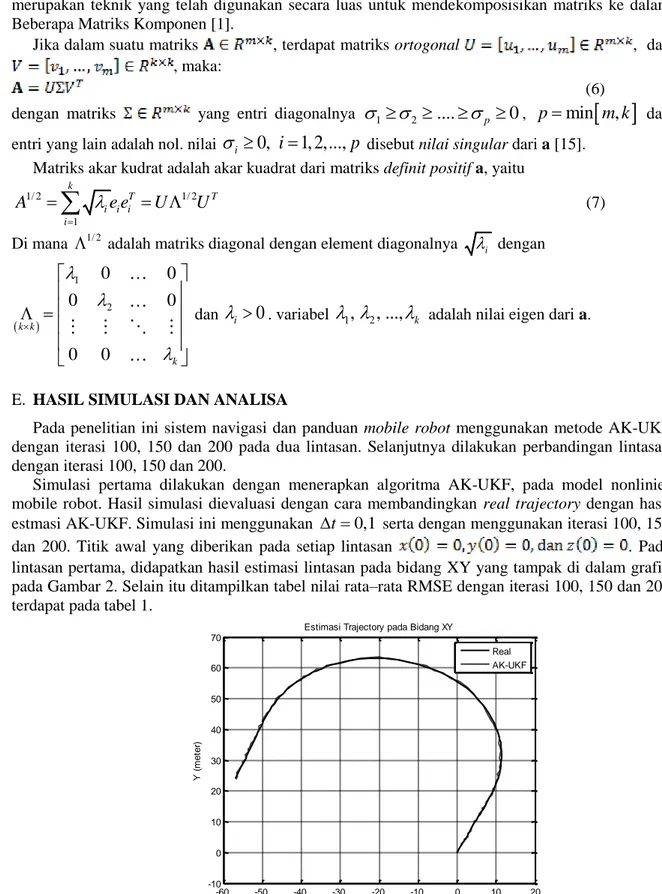
Simulasi pertama dilakukan dengan menerapkan algoritma AK-UKF, pada model nonlinier mobile robot. Hasil simulasi dievaluasi dengan cara membandingkan real trajectory dengan hasil estmasi AK-UKF. Simulasi ini menggunakan t 0,1 serta dengan menggunakan iterasi 100, 150 dan 200. Titik awal yang diberikan pada setiap lintasan . Pada lintasan pertama, didapatkan hasil estimasi lintasan pada bidang XY yang tampak di dalam grafik pada Gambar 2. Selain itu ditampilkan tabel nilai rata–rata RMSE dengan iterasi 100, 150 dan 200 terdapat pada tabel 1.
-60 -50 -40 -30 -20 -10 0 10 20 -10 0 10 20 30 40 50 60 70
Estimasi Trajectory pada Bidang XY
X (meter) Y ( m e te r) Real AK-UKF
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
144
Grafik pada Gambar 2 menunjukkan bahwa mobile robot mengikuti lintasan yang telah ditentukan pada bidang XY, di mana hasil estimasi trajectory dengan menggunakan metode AK-UKF memiliki akurasi yang tinggi dengan error posisi kurang 3% . Error yang didapatkan ketika 3% adalah untuk posisi x yaitu 1.4 m, untuk posisi y adalah 3 m. Error yang didapatkan pada simulasi dengan iterasi 100, 150 dan 200 yang ditunjukkan pada Tabel 1.
Pada Tabel 1, tampak bahwa simulasi dengan 300 iterasi lebih akurat daripada iterasi 100 dan 150. Tabel 1 menunjukkan bahwa waktu simulasi dengan 200 iterasi lebih lama daripada 100 dan 150 iterasi. Error posisi x dan y menunjukkan bahwa penyimpangan posisi saat bergerak mengikuti lintasan, sedangkan error posisi sudut adalah kesalahan ketika bergerak belok sehingga juga mempengaruhi error posisi x dan y.
Tabel 1. Perbandingan nilai RMSE dengan metode AK-UKF berdasarkan 100, 150 dan 200, iterasi Pada Lintasan Pertama
Iterasi 100 Iterasi 150 Iterasi 200
Posisi X 0.55416 m 0.47878 m 0.39396 m Posisi Y 0.29852 m 0.28553 m 0.27155 m Posisi Sudut 0.046336 m 0.025005 m 0.011931 m Waktu Simulasi 2.0881 s 4.3351 s 5.4458 s
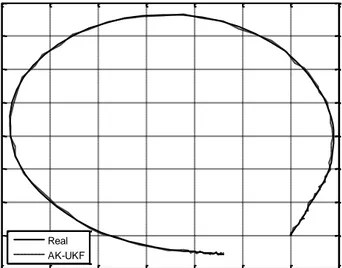
Sedangkan hasil simulasi kedua yang ditunjukkan pada Gambar 3. Grafik pada Gambar 3 menunjukkan bahwa mobile robot mengikuti lintasan yang telah ditentukan pada bidang XY, di mana hasil estimasi trajectory dengan menggunakan metode AK-UKF memiliki akurasi yang tinggi dengan error posisi kurang 3% . Error yang didapatkan ketika 3% adalah untuk posisi x yaitu 0.85 m, untuk posisi y adalah 1.1 m. Error yang didapatkan pada simulasi dengan 100, 150 dan 200 iterasi yang ditunjukkan pada Tabel 2.
-30 -25 -20 -15 -10 -5 0 5 -5 0 5 10 15 20 25 30 35
Estimasi Trajectory pada Bidang XY
X (meter) Y ( m e te r) Real AK-UKF
Gambar 3. Estimasi lintasan pada lintasan kedua pada bidang XY
Pada Tabel 2, tampak bahwa dengan 200 iterasi lebih akurat daripada 100 dan 150 iterasi. Tabel 2 menunjukkan bahwa waktu simulasi dengan 200 iterasi lebih lama daripada 100 dan 150 iterasi karena proses simulasi untuk melakukan iterasi lebih banyak. Error posisi x, dan y menunjukkan bahwa penyimpangan posisi saat bergerak mengikuti lintasan.
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
145 Tabel 2. Perbandingan nilai RMSE dengan metode AK-UKF berdasarkan 100, 150 dan 200,
iterasi pada lintasan kedua
Iterasi 100 Iterasi 150 Iterasi 200
Posisi x 0.52751 m 0.46589 m 0.38196 m
Posisi y 0.29457 m 0.30514 m 0.26155 m
Posisi sudut 0.028664 m 0.02652 m 0.012771 m
Waktu simulasi 2.0781 s 4.3281 s 5.4375 s
Berikutnya adalah perbandingan berdasarkan lintasan dengan jumlah iterasi yang sama, baik pada lintasan pertama dan kedua yang tampak pada Tabel 3 – 5. Pada Tabel 3 dengan menjalankan 100 iterasi didapatkan bahwa lintasan kedua lebih akurat daripada lintasan pertama dan waktu simulasinya juga lebih cepat daripada lintasan pertama.
Tabel 3. Perbandingan nilai RMSE berdasarkan lintasan dengan menjalankan 100 Iterasi
Iterasi 100 Lintasan 1 Lintasan 2 Posisi X 0.55416 m 0.52751 m Posisi Y 0.29852 m 0.29457 m Posisi Sudut 0.046336 m 0.028664 m Waktu Simulasi 2.0881 s 2.0781 s
Pada Tabel 4 dengan menjalankan 150 iterasi didapatkan bahwa lintasan pertama lebih akurat daripada lintasan kedua, namun lintasan kedua memiliki waktu simulasi yang lebih cepat daripada lintasan kedua. Sedangkan pada Tabel 5 dengan menjalankan 200 iterasi didapatkan bahwa lintasan kedua lebih akurat daripada lintasan pertama.
Tabel 4. Perbandingan nilai RMSE berdasarkan lintasan dengan menjalankan 150 iterasi
Iterasi 150 Lintasan 1 Lintasan 2 Posisi x 0.47878 m 0.46589 m Posisi y 0.28553 m 0.30514 m Posisi sudut 0.025005 m 0.02652 m Waktu simulasi 4.3351 s 4.3281 s
Tabel 5. Perbandingan nilai RMSE berdasarkan lintasan dengan menjalankan 200 iterasi
Iterasi 200 Lintasan 1 Lintasan 2 Posisi x 0.39396 m 0.38196 m Posisi y 0.27155 m 0.26155 m Posisi sudut 0.011931 m 0.012771 m Waktu simulasi 5.4458 s 5.4375 s
Dari hasil analisa pada simulasi lintasan pertama dan kedua didapatkan bahwa dengan menjalankan 200 iterasi yang lebih akurat daripada 100 dan 150 iterasai. Ditinjau dari perbandingan lintasan didapatkan bahawa lintasan kedua mempunyai akurasi yang lebih baik. Sehingga metode AK-UKF dapat digunakan sebagai salah satu metode sistem navigasi dan panduan mobile robot.
5. KESIMPULAN
Berdasarkan hasil dan analisa simulasi dapat disimpulkan bahwa metode AK-UKF dapat digunakan sebagai sistem navigasi dan panduan pada mobile robot dengan estimasi trajectory yang menghasilkan error posisi kurang dari 3%. Ditinjau dari menjalankan sejumlah iterasi, bahwa
Technology Science and Engineering Journal, Volume 1 No 2 June 2017 E-ISSN: 2549-1601
146
dengan menjalankan 200 iterasi lebih akurat daripada 100 dan 150 iterasi. Jika ditinjau berdasarkan perbandingan lintasan, bahwa lintasan kedua lebih akurat daripada lintasan pertama.
6. DAFTAR PUSTAKA
[1]. Herlambang, T. 2012, “Akar Kuadrat Ensemble Kalman Filter (AK-EnKF) Untuk Estimasi Posisi Peluru Kendali”, Tesis Magister, Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember, Surabaya.
[2]. Kalman, R.E., 1960. A New Approach To Linear Filtering And Prediction Problems. ASME Journal Of Basic Engineering, Vol 82, Pp. 35-45.
[3]. Herlambang, T., Djatmiko E.B And Nurhadi H., 2015 “Navigation And Guidance Control System Of AUV With Trajectory Estimation Of Linear Modelling”, Proc. Of International Conference On Advance Mechatronics, Intelligent Manufactre, And Industrial Automation, IEEE , ICAMIMIA 2015, Surabaya, Indonesia, Pp. 184-187, Oct 15 – 17
[4]. Herlambang, T., Djatmiko E.B And Nurhadi H., 2015, “Ensemble Kalman Filter With A Square Root Scheme (EnKF-SR) For Trajectory Estimation Of AUV SEGOROGENI ITS”, International Review Of Mechanical Engineering IREME Journal, Vol. 9, No. 6. Pp. 553-560, ISSN 1970 – 8734. Nov.
[5]. Ermayanti, E., Aprilini, E., Nurhadi H, And Herlambang T, 2015, “Estimate And Control Position Autonomous Underwater Vehicle Based On Determined Trajectory Using Fuzzy Kalman Filter Method”, International Conference On Advance Mechatronics, Intelligent Manufactre, And Industrial Automation (ICAMIMIA)-IEEE Surabaya Indonesia, 15 – 16 Oktober 2015.
[6]. Herlambang, T, Mufarrikoh, Z., Dan Yudianto, F., 2016, “Estimasi Trajectory Mobile Robot Menggunakan Metode Ensemble Kalman Filter Square Root (EnKF-SR)”, Seminar Nasional Pascasarjana STTAL Surabaya Indonesia, 22 Desember 2016. Hal XVI-1 – C-XVI-5.
[7]. Gumilar, A. 2011, “Estimasi Posisi Peluru Kendali Pada Lintasan Menggunakan Unscented Kalman Filter”, Tugas Akhir, Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember, Surabaya.
[8]. Herlambang, T, dan Nurhadi H., 2016, “Desain Sistem Kendali Gerak Surge dan Roll pada Sistem Autonomous Underwater Vehicle dengan Metode Sliding Mode Control (SMC)”, Seminar Nasional Pascasarjana STTAL Surabaya Indonesia, 22 Desember 2016. Hal A-XII-1 – A-XII-6. Mega, C. A., & Camera, C. T. (2016). sgn (x 1.
[9]. Herlambang, T., 2017, “Desain Sistem Kendali Gerak Surge, Sway Dan Yaw Pada Autonomous Underwater Vehicle Dengan Metode Sliding Mode Control (SMC)” Journal Of Mathematics And Its Applications (LIMITS), Vol. 14, No.1, Page 53-60, ISSN 2579-8936. Mei.
[10]. Herlambang, T., Nurhadi H, And Djatmiko E.B., 2016, “Optimasi Model Linier 6-DOF Pada Sistem Autonomous Underwater Vehicle”, Seminar Nasional Maritim, Sain Dan Teknologi Terapan (MASTER) PPNS Surabaya Indonesia, 21 November 2016.
[11]. Oktafianto, K., Herlambang T., Mardlijah, Nurhadi H., 2015, “Design Of Autonomous Underwater Vehcle Motion Control Using Sliding Mode Control Method”, International Conference On Advance Mechatronics, Intelligent Manufactre, And Industrial Automation (ICAMIMIA)-IEEE Surabaya Indonesia, 15 – 16 Oktober 2015.
[12]. Herlambang, T., Nurhadi H And Subchan., 2014. “Preliminary Numerical Study On Designing Navigation And Stability Control Systems For ITS AUV”, Applied Mechanics And Materials, Trans Tech Publications, Switzerland. Vol. 49, Pp. 420-425
[13]. Hartini, S. 2011, “Implementasi Metode Ensemble Kalman Filter (EnKF) Untuk Mengestimasi Posisi Robot Mobil”, Tugas Akhir, Jurusan Matematika FMIPA Institut Teknologi Sepuluh Nopember, Surabaya.
[14]. Apriliani, E., Dan Sanjaya, B.A., 2007, Reduksi Rank Pada Matriks-Matriks Tertentu, Laporan Penelitian Hibah Pasca, Institut Teknologi Sepuluh Nopember, Surabaya.
[15]. Golub, H.G., Dan Loan,V.F., 1993, “Matrix Computations (Second Edition)”, The John Hopkins University Press, Baltimore And London.