Aplikasi Programmable Logic Controller (PLC) pada
Prototipe Robot Pemindah Bushing
Djulil Amri
Jurusan Teknik Elektro Universitas Sriwijaya Palembang, Indonesia [email protected]
Bhakti Yudho Suprapto
Jurusan Teknik Elektro Universitas Sriwijaya Palembang, Indonesia [email protected]
Abstract—Salah satu pemeliharaan buldozer yang sering dilakukan adalah penggantian bushing. Proses memasang bushing pada bushingframe biasanya menggunakan pemanasan terlebih dahulu dimana proses ini banyak mengalami kendala dari segi lingkungan. Untuk mengatasi masalah tersebut dirancanglah robot pemindah bushing dengan penggeraknya adalah motor arus searah dan sistem gripper yang menggunakan pneumatic. Pada penelitian ini pengendalian pergerakan robot pemindah bushing menggunakan Programmable Logic Control (PLC) dengan bahasa pemograman ladder diagram. Berdasarkan hasil pengujian yang dilakukan, sistem kendali yang dirancang berdasarkan pemograman PLC dan perancangan elektrikal dapat bekerja dengan baik dan sudah sesuai dengan yang diinginkan. Robot berhasil memindahkan bushing seberat 25 kg dengan tekanan yang dibutuhkan sebesar 500 kPa
Keywords—Robot Pemindah Bushing; PLC; Motor arus searah;peumatic
I. PENDAHULUAN
Saat ini banyak perusahaan yang beroperasi di wilayah Sumatera Selatan bergerak di bidang pertambangan khususnya pertambangan batubara. Peralatan yang banyak digunakan pada industri pertambangan ini diantaranya adalah buldozer. Dalam rutinitas fungsinya, buldozer ini memerlukan perawatan yang terjadwal dan teratur. Perawatan yang paling sering dilakukan diantaranya adalah penggantian bushing.[1] Namun proses memasang bushing pada bushingframe memerlukan proses yang cukup rumit karena memerlukan pemanasan terlebih dahulu (preheating) agar bushing tersebut memuai sehingga mudah untuk dimasukkan pada frame-nya. Akan tetapi hal ini menuai persoalan baru yang menyangkut permasalahan lingkungan seperti terlihat pada gambar 1 berikut ini.
Fig. 1. Proses preheating bushing secara konvensional[1]
Selain menggunakan cara konvensional seperti terlihat pada gambar 1, digunakan juga cara lain seperti terlihat pada gambar 2 berikut ini :
Fig. 2. Proses handling bushing secara manual setelah menggunakan bushing
heater[1]
Namun yang menjadi permasalahan adalah proses handling bushing ke frame-nya yang menggunakan hoist crane. Hal ini dapat membahayakan operatornya. Oleh karena itu penulis mencoba untuk membantu permasalahan ini dengan merancang sebuah prototipe robot untuk memindahkan bushing tersebut berbasis Programmable Logic Controller (PLC) sebagai pengendalinya. PLC ini digunakan karena cukup kokoh dan tahan dalam lingkungan industri dan telah banyak digunakan di industri sehingga pada pekerja diindustri tersebut lebih familiar dengan kerja PLC.
II. TINJAUAN PUSTAKA
A. Programmable Logic Controller (PLC)
tersebut [4]. Aplikasi lain dari PLC ini diantaranya yaitu pada Pengendalian Crane untuk menempatkan peti kemas[2], dan pada pengaturan mesin yang dipergunakan untuk memotong kentang[5] dan masih banyak lagi. Oleh karena itu PLC merupakan salah satu peralahan yang dapat dipergunakan pada penelitian ini.
Sistem kendali yang akan dirancang pada robot pemindah bushing ini menggunakan PLC, hal ini dikarenakan PLC telah banyak digunakan secara luas dalam banyak aplikasi dan sangat fleksibel. Penggunaan PLC sebagai pengendali pada robot banyak sekali dipergunakan Karena bentuknya yang rigid, mudah dalam pemrogramannya, mudah dalam instalasinya serta mudah dalam perawatannya. Sebuah PLC adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relai yang dijumpai pada sistem kontrol proses konvensional. PLC bekerja dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya (logik, 0 atau 1, hidup atau mati). Pengguna membuat program (yang umumnya dinamakan diagram tangga atau ladder diagram) yang kemudian harus dijalankan oleh PLC yang bersangkutan. Dengan kata lain, PLC menentukan aksi apa yang harus dilakukan pada instrumen keluaran berkaitan dengan status ukuran atau besaran yang diamati.PLC banyak digunakan pada aplikasi-aplikasi industri, misalnya proses pengepakan, pananganan bahan, perakitan otomatis dan lain sebagainya. Dengan kata lain, hampir semua aplikasi yang memerlukan kontrol listrik atau elektronik membutuhkan PLC.
Penggunaan PLC sebagai pengendali suatu sistem memiliki beberapa kelebihan dibandingkan dengan sistem kontrol proses konvensional, antara lain :[2]
Dibandingkan dengan sistem kontrol proses konvensional, jumlah kabel yang dibutuhkan bisa berkurang hingga 80%;
PLC mengkonsumsi daya lebih rendah dibandingkan dengan peralatan kontrol proses konvensional (berbasis relay);
Fungsi diagnostik pada sebuah kontroler PLC membolehkan pendeteksian kesalahan yang mudah dan cepat;
Tidak membutuhkan spare part yang banyak;
Lebih murah dibandingkan dengan sistem konvensional, khususnya dalam kasus penggunaan instrumen I/O yang cukup banyak dan fungsi operasional prosesnya cukup kompleks;
B. Sistem Pneumatik
Lengan robot yang akan dirancang ini digerakkan dengan menggunakan sistem pneumatik,hal ini dikarenakan sistem pneumatik ini baik dalam gerakan lurus (maju-mundur) dan dengan sedikit tambahan bisa juga digunakan untuk rotasi atau gerakan lainnya.Sistem pneumatik ini telah banyak digunakan dalam industri – industri.
Pneumatik berasal dari bahasa Yunani yang berarti udara atau angin. Sedangkan sistem pneumatik sendiri merupakan semua sistem yang menggunakan tenaga yang disimpan dalam bentuk udara yang dimampatkan untuk menghasilkan suatu kerja.
Jaringan kontrol untuk sinyal aliran yang dipakai sebagai output ke sistem kerja tampak pada gambar berikut :
Fig. 3. Diagram blok kompenen-komponen sistem pneumatik
Elemen-elemen diatas pada penggunaan dalam sistem pneumatik biasanya mempergunakan simbol yang menunjukkan fungsinya. Simbol-simbol itu bisa dikombinasikan/dirangkai untuk menghasilkan solusi pada diagram jaringan kerja. Diagram kerja harus digambarkan susunannya seperti struktur pada fig 4. Katup penentu arah dapat mempunyai fungsi sebagai pengontrol sensor, prosesor atau aktuator. Apabila katup penentu arah digunakan untuk mengontrol gerakan sebuah silinder maka katup ini berfungsi sebagai pengontrol aktuator. Apabila dipakai mengolah sinyal maka katup ini berfungsi sebagai prosesor. Bagitu pula bila dipakai sebagai peraba sebuah gerakan maka berfungsi sebagai sensor.
Fig. 4. Struktur kompenen/elemen dalam sistem pneumatik
III. METODE PENELITIAN
Penelitian ini dilakukan dengan beberapa metode diantaranya adalah :
A. Studi literatur
B. Pemodelan dan Perancangan
Pada tahapan ini diagram kerja robot ini terlihat pada fig 5. berkut ini :
Pemancar Game Pad Wirelles
Mikrokontroller Penerima SPC Game Pad
Motor Penggerak Roda
Motor Pendorong Motor Base H-Bridge
PLC
Phenumatic Kompresor
Motor Lifter
Fig. 5. Diagram kerja robot
Pada fig. 5 terlihat bahwa pengendali utama yaitu PLC yang bertugas untuk mengendalikan kerja robot berdasarkan sinyal dari gamepad yang ditekan oleh operator. PLC ini akan mengirimkan sinyal pada aktuator dan penggeraknya yang berupa motor arus searah maupun silinder pneumatik. Sedangkan perancangan robot ini dapat dilihat pada fig 6. Berikut ini :
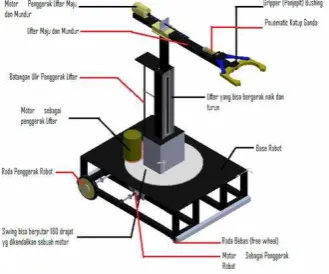
Fig. 6. Rancangan robot pemindah Bushing dengan PLC
Pada gambar tersebut terlihat bahwa gripper akan berbentuk bulat karena bushing yang akan dijepit berbentuk bulat. Penggerak gripper akan dipergunakan pneumatik karena lebih kuat dalam mencengkram bushing. Motor yang akan dipergunakan untuk penggerak roda dan lifter yaitu motor induksi karena memiliki torsi dan daya yang besar sehingga akan dapat mampu mengatasi beban yang ada.
C. Pengujian
Setelah dilakukan perancangan dan pemodelan serta dilakukan pembuatan robot. Pembuatan ini berdasarkan pada apa yang telah dirancang dan dimodelkan. Untuk menentukan bahwa robot ini telah sesuai dengan yang diinginkan maka dilakukan pengujian diantaranya adalah pengujian program PLC, pengujian kemampuan mengangkat beban, pengujian gripper.
IV. HASIL DAN PEMBAHASAN
Pada bagian ini dilakukan pengujian terhadap robot. Adapun bentuk prototipe robot yang telah dirancang seperti yang ditunjukkan pada fig 7 berikut ini :
Fig. 7. Rancangan prototipe robot pemindah Bushing dengan PLC
Sedangkan bushing yang akan diangkat memiliki dimensi tinggi 65 cm diameter 45 cm dan tebal 1,2 cm dengan berat ± 25 kg, seperti terlihat pada fig. 8 berikut ini :
a b
Fig. 8. Gambar bushing a. Bushing yang baru b. Bushing yang telah
digunakan
Kemudian dilakukan beberapa pengujian untuk menentukan apakah robot ini telah berfungsi sebagaimana mestinya atau belum.
A. Pengujian program PLC
Hasil dari pengujian program dapat dilihat pada gambar-gambar yang ditampilkan. Warna hijau pada gambar menunjukkan aliran arus listrik atau pada kontak menyatakan dalam kondisi aktif.
1. Proses Pengendalian Roda Belakang Robot
Fig. 9. Roda belakang bergerak maju
Fig. 10. Roda belakang bergerak mundur
2. Proses Pengendalian Roda Depan
Fig. 12.Roda depan berputar ke kiri
3. Proses Lifter Lengan Robot
Fig. 13.Program lifter lengan robot bergerak naik
Fig. 14.Program lifter lengan robot bergerak turun
4. Proses Tiang Lifter Lengan Robot
Fig. 15.Program tiang lifter lengan robot bergerak ke kanan
Fig. 16.Program tiang lifter lengan robot bergerak ke kiri
5. Proses pengendalian gripper robot
Fig. 17.Pb_9 Aktif, Pneumatik_1 Aktif Dan CNT 000 Menghitung 1
Fig. 18. Pb_9 Aktif Kembali, Pneumatik_1 Tidak Aktif Dan CNT 000
Menghitung 2
Fig. 19.Pb_Start Aktif Dan CNT 000 Direset
B. Pengujian arus output motor DC pada sistem lifter Motor DC yang digunakan untuk menggerakkan sistem lifter ini dikopel dengan katrol penggulung tali katrol dengan menggunakan gear. Motor DC ini dapat bekerja dengan baik
pada sistem lifter sampai lengan mengangkat bushing seberat 25kg. Hasil pengukuran output arus motor DC pada saat sistem lifter naik dan turun dapat dilihat pada tabel berikut.
TABLE I. PENGUJIAN ARUS OUTPUT MOTOR DCPENGGERAK SISTEM LIFTER
PADA SAAT NAIK
No
Tegangan Sumber (Volt) Arus (Ampere)
Tanpa
TABLE II. PENGUJIAN ARUS OUTPUT MOTOR DC PENGGERAK SISTEM LIFTER
PADA SAAT TURUN
No
Tegangan Sumber (Volt) Arus (Ampere)
Tanpa disebabkan oleh gaya gravitasi bumi sehingga pada saat motor DC menurunkan sistem lifter, gaya berat beban (bushing) ikut menarik motor. Dari pengujian yang dilakukan pada beban hingga sebesar 25 kg, lifter masih dapat bergerak naik ke atas secara perlahan dan turunnya juga tidak terlalu kencang.Motor DC yang digunakan sebagai penarik lifter ini memiliki nilai rated current sebesar 9 A dan stall current sebesar 28A. Hal ini mengakibatkan lifter dapat bergerak dengan baik saat membawa bushing sebesar 20 kg karena arus yang dibutuhkan dibawah 9 A, dan masih dapat bergerak cukup baik dengan bushing 25 kg yang membutuhkan arus sebesar 10 A – 11 A.
C. Pengujian Sistem Pneumatik Gerakan Dorong Dan Tarik Pada Lengan Robot
ini terjadi sesuai dengan bukaan arah angin (tekanan) pada solenoid valve yang dikendalikan dari PLC dengan prinsip push button. Dari pengujian yang dilakukan, aktuator ini dapat bergerak mendorong dan menarik jika diberi angin dengan tekanan minimal 100 KPa.
Fig. 20.Sistem pneumatik pada lengan robot
D. Pengujian Sistem Pneumatik Pada Gripper Robot
Dari pengujian yang telah dilakukan, gripper dapat bekerja dengan baik untuk menjepit dan menahan bushing agar mampu di angkat dan di pindahkan dari posisi yang satu ke posisi yang lainnya.Sama dengan sistem pneumatik pada lengan, sistem pneumtik pada gripper ini pun memiliki tekanan minial agar mampu menjepit atau membuka.Pada saat tanpa bushing gripper ini dapat menjepit atau membuka dengan tekanan minimal 200 KPa, sedangkan untuk menahan bushing berdiameter 270 mm dapat dilihat pada tabel berikut.
TABLE III. TEKANAN MINIMAL SISTEM PNEUMATIK UNTUK MENJEPIT DAN
MENAHAN BUSHING PADA GRIPPER
Berat Bushing (kg) Tekanan minimal
KPa Psi
- 200 29
20 450 65,25
25 500 72,5
V. KESIMPULAN
1. Robot pemindah bushing dapat menjepit, membawa, memindahkan, dan memasang bushing hingga berat maksimal 25 kg.
2. Sistem steering masih dapat bekerja hingga berat bushing 25 kg dengan arus sebesar 13,8 A – 15,1 A.
3. Untuk menjepit bushing dengan berat 20 kg dan 25 kg dibutuhkan tekanan minimal 500 KPa
REFERENSI
[1] Bhakti, Y. S., and Dedy, R, “Prototype Bushing Handling Robot using
ATMega 8535 Microcontroller,” Proceeding ISSTIN 2012 (International
Seminar On Science and Technology Innovation), University of Al Azhar, pp 86-91, 2-4 Oktpber 2012.
[2] Bhakti, Y. S., “Simulasi Crane Untuk Penempatan Peti Kemas Berbasis
Programmable Logic Controller,” Majalah Sriwijaya, Vol.11-No.3,
April 2008.
[3] Swainston, F., “A Systems Approach to Programmable Controller”,
Newnes. Butterworth-Heineman Ltd.,1991.
[4] Suhardiyanto, H., A. Sapei, C. Arief, A. Mardjani, B.D. Astuti, “Sistem
Kendali Berbasis PLC untuk Pengaturan Pemberian Larutan Nutrisi pada Jaringan Irigasi Tetes”, Jurnal Ilmiah Ilmu Komputer4(2): 42-47. 2006.
[5] Deny, W. N., “Sistem Pengaturan Mesin Pemotongan Kentang Berbasis
Programmable Logic Controller,” Jurnal SMARTek, vol.8, No.4, pp.