m2l22 2 + m2l1l2 1cos( 1 - 2) - m2l1l2 1( 1- 2) sin ( 1 - 2)
= - m2l1l2 1 2sin ( 1 - 2) - m2gl2sin 2
Dengan demikian beberapa langkah aljabar, diperoleh
m2l22 2 + m2l1l2 1cos( 1 - 2)- m2l1l2 12sin ( 1 - 2) = - m2gl2sin 2
U ntuk menyederhanakan sistem ini, harus dibuat dengan osilasi yang kecil dimana dapat dianggap sin = dan cos =1 sehingga :
Bandul pertama :
(m1+ m 2) l12 1 + m2l1l2 2 + (m1+ m 2)gl1 1= 0
Bandul kedua :
l22 2 + l1 1+ g 2 .= 0
jika m1= m2,maka persamaan gerak sistem ini menjadi :
Bandul pertama :
2ml12 1 + ml1l2 2+ 2mgl1 1= 0
2l12 1 + l1l2 2 + 2gl1 1= 0
Bandul kedua :
Aplikasi dengan menggunakan matlab
Pada sistem ini digunakan 2 sistem kontrol, yang pertama untuk bandul pertama dan kedua untuk bandul kedua dimana persamaan gerak bandul pertama dan kedua pada sistem ini tidak dapat digabungkan karena persamaan gerak nya kompleks.
Keterangan untuk grafik :
Step :kuning
step 1 :ungu
step 2 :biru
Bandul pertama
Alami
Jika kita melihat pada gambar hasil runing pada matlap dan hanya melihatnya
sekilas, maka kita bisa katakan sistem alami ini cukup responsif di karenakan sistem
mulai merespon tepat pada detik yang pertama. Namun bila di lihat dengan seksama awal
respon sistem ini malah bergerak menjauhi nilai setpoint. Yang seharusnya bergerak ke
barisan angka minus. Respon sistem yang seperti ini di sebabkan oleh output pada
persamaannya yang bernilai negatif. Setelah mencapai minus -0.375 sistem mulai
bergerak ke atas dan membentuk osilasi. Dengan mencapai puncak pertama pada detik
ke 0.358 atau peak timenya 0.358 sistem terus mengalami osilasi untuk seterusnya.
Dengan adanya osilasi yang terus-menerus menandakan bahwa semakin lama, semakin
sistem ini tidak akan stabil. Dalam kasus yang di angkat yaitu bandul dengan dua masa
ini, yang akan di kontrol adalah 1dan 2 . fungsi pengontrolan kedua tetha ini agar
bandul dengan dua masa yang berbeda ini akan terus bergerak tanpa ada yang
mendahului pergerakan akibat perbedaan panjang tali. Maka pada persamaan alami tentu
sistem tidak akan bergerak bersamaan( pada waktu yang sama benda A bisa lebih cepat
atau lebih lambat berayun sesuai dengan panjang tali yang dimilikinya) tanpa
pengontrolan apa-apa. Maka hasil yang di peroleh sesuai dengan kenyataan yang ada.
Ket : kuning :kp= 2
Ungu : kp = 10
Biru : kp = 100
Hasil yang di peroleh setelah salah satu kontroler di masukkan, hasilnya tetap berupa
osilasi yang terus menerus. Semakin besar nilai kp yang di berikan maka sinyal yang di
timbulkan oleh pengaruh kontroler ini akan menambah ketidakstabilan sistem, di tandai
dengan semakin besar nilai kp maka semakin banyak osilasi yang terbentuk. Salah satu
kontroler telah di gunakan namun hasilnya tetap tidak stabil. Bandul tidak bisa bergerak
secara bersamaan dengan masa yang berbeda jika hanya menggunakan kontroler
proporsional.
Ket : kuning :kp= 10 ; kd=10
Ungu : kp = 10 ; kd = 100
Biru : kp = 100 ; kd = 100
Dari gambar kita dapat melihat bahwa sistem tidak berosilasi lagi ketika kontrol proporsional disertai dengan kontrol derivatif. Namun tetap risetime nya mengarah kebawah karena masih ada tanda minus pada persamaan.
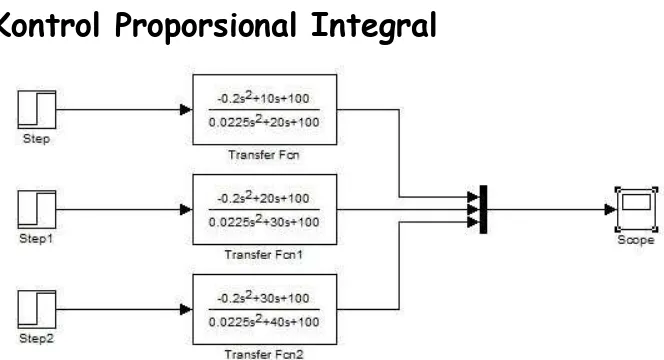
Kontrol Proporsional Integral
Ket :kuning :kp= 10 ; ki=10
Ungu : kp = 100 ; ki = 10
Biru : kp = 100 ; ki= 100
Dengan menambah satu kontroler yaitu kontroler integral, sistem menunjukan kemajuan.
Sistem mulai bergerak perlahan-lahan menuju nilai setpoint. Rise timenya baik karena
mulai bergerak naik pada detik yang pertama. Osilasi yang di timbulkan sebelumnya
akhirnya hilang. Pemberian nilai kp yang semakin besar akan mempercepat sistem
mencapi kestabilan sedangkan nilai ki yang besar akan menghilangkan error steady state.
Pada warna biru sistem perlahan mulai mencapai kestabilan. Dengan settling timenya 8,6.
Dengan kombinasi kedua kontroler ini maka sistem bisa lebih cepat mencapai stabil(yang
sebelumnya tidak pernah stabil), dan dapat menghilangkanessdari respon sistem.
Dengan adanya kombinasi kedua kontroler ini, sesuai hasil yang di peroleh maka bandul
Kontrol Proporsional Integral Derivatif
Ket :kuning :kd = 20 ; kp= 400 ; ki=700
Ungu : kd = 30 ;kp = 1000 ; ki = 700
Biru : kd = 30 ; kp = 400 ; ki= 300
Pada sistem ini variasi kp, kd dan ki yang lebih baik adalah pada warna kuning dimana nilai kd yang digunakan adalah 20. Apabila kd diperbesar maka sistem akan menjadi tidak stabil dimana akan berosilasi seperti pada warna biru.
Dengan menggunakan kontrol PID rise time nya menjadi sangat baik dimana tidak mengarah ke arah bawah lagi karena tanda minus tidak ada lagi karena adanya tambahan kontrol derivatif pada persamaan gerak.
Pada kontrol yang berwarna kuning rise time nya pada detik ke 1.0031 dan ini sudah sangat baik namun mengalami overshot sampai 1.0559 dan setling time nya pada detik ke 4.0163 dan sistem stabil.untuk yang berwarna biru sistem mencapai kestabilan pada 7.59. jadi dengan variasi kd 20 kp 400 dan ki 700 sistem dapat mencapai
Bandul kedua
Alami
Rise time pada sistem ini mengarah ke bawah karena ada tanda minus pada persamaan gerak sistem. Dan sistem ini masih memiliki osilasi yang besar dimana puncak tertinggi nya di 8.14 sehingga sistem ini dapat dikatakan masih jauh dari kestabilan.
Ket : kuning :kp= -8
Ungu : kp = 1
Biru : kp = 2
Dengan adanya kontrol proporsional, terjadi perubahan pada besarnya osilasi. Dimana dengan kp -8 puncak pertaman nya pada 0.85 namun rise time nya tetap
mengarah kebawah karena masih ada tanda minus pada persamaan. Dan dengan kontrol proporsional, jika kp nya di perbesar maka osilasi akan semakin besar pula sehingga error pada sistem juga semakin besar.
Zoom :
Ket : kuning :kp= 100 ; kd=10
Ungu : kp = 200 ; kd = 10
Biru : kp = 1000 ; kd = 10
Dari gambar kita dapat melihat bahwa sistem tidak berosilasi lagi ketika kontrol proporsional disertai dengan kontrol derivatif. Namun tetap risetime nya mengarah kebawah karena masih ada tanda minus pada persamaan.
Kontrol Proporsional Integral
Zoom
Ket :kuning :kp= 10 ; ki=100
Ungu : kp = 20 ; ki = 100
Biru : kp = 30 ; ki= 100
Rise time nya masih ke arah bawah namun pada sistem tidak terjadi overshot lagi. Dari gambar dapat diketahui bahwa biru kurang baik karena sistem masih mengalami osilasi. Dimana bila kp diperbesar maka osilasi yang terjadi semakin besar.
setling time pada warna kuning pada detik ke 3.02 dan ungu pada detik ke 3.80 jadi sistem dengan kp 10 dan juga ki 100 yang lebih baik.
Kontrol Proporsional Integral Derivatif
Ket :kuning :kd = 25 ; kp= 1500 ; ki=2000
Ungu : kd = 20 ;kp = 1000 ; ki = 2000
Biru : kd = 20 ; kp = 500 ; ki= 700
Dengan menggunakan kontrol PID rise time nya menjadi sangat baik dimana tidak mengarah ke arah bawah lagi karena tanda minus tidak ada lagi karena adanya tambahan kontrol derivatif pada persamaann gerak.
Pada kontrol yang berwarna ungu rise time nya pada detik ke 1.0021 dan ini sudah sangat baik namun mengalami overshot sampai 1.0335 dan setling time nya pada detik ke 3.6131 dan sistem stabil.untuk yang berwarna biru sistem tidak pernah mencapai
kestabilan dan memiliki error steady state sebesar 0.0006. jadi dengan variasi kd 20 kp 1000 dan ki 2000 sitem dapat mencapai kestabilan.