BAB 2
LANDASAN TEORI
2.1 Pengertian Citra
Pengertian citra dari beberapa ahli yaitu menurut Hornby, citra merupakan gambaran yang terekam oleh kamera atau oleh sensor lainnya. Sedangkan Simonett mengutarakan dua pengertian tentang citra yaitu : Pertama, gambaran obyek yang dibuahkan oleh pantulan atau pembiasan sinar yang difokuskan oleh sebuah lensa atau sebuah cermin. Kedua, gambaran rekaman suatu obyek (biasanya berupa gambaran pada foto) yang dibuahkan dengan cara optik, elektro-optik, optik mekanik, atau elektronik. Pada umumnya ia digunakan bila radiasi elektromagnetik yang dipancarkan atau dipantulkan dari suatu obyek tidak langsung direkam pada film.” (Sutanto, 1994:6)
Kata citra atau yang dikenal secara luas dengan kata “gambar” dapat diartikan sebagai suatu fungsi intensitas cahaya dua dimensi, yang dinyatakan oleh f(x,y), di mana nilai atau amplitudo dari f pada koordinat spasial (x,y) menyatakan intensitas (kecerahan) citra pada titik tersebut.
Citra dapat dikelompokkan menjadi dua bagian yaitu citra diam (still Images) dan citra bergerak (Imoving images). Citra diam adalah citra tunggal yang tidak bergerak. Sedangkan citra bergerak adalah rangkaian citra diam yang ditampilkan secara beruntun (sekuensial), sehingga member kesan pada mata sebagai gambar yang bergerak. Setiap citra didalam rangkaian itu disebut frame. Gambar-gambar yang tampak pada film layar lebar atau televise pada hakekeatnya terdiri dari ratusan sampai ribuan frame (Sitorus,Syahriol dkk,2006)
2.2 Pengolahan Citra Digital
optimal untuk tujuan analisis, melakukan proses penarikan informasi atau deskripsi objek atau pengenalan objek yang terkandung pada citra, melakukan kompresi atau reduksi data untuk tujuan penyimpanan data, transmisi data, dan waktu proses data. Input dari pengolahan citra adalah citra, sedangkan output-nya adalah citra hasil pengolahan.(T.Sutoyo,2009)
Pada pengenalan wajah proses capture sangat menentukan tingkat kesulitan dalam komputasinya, salah satunya bahwa dalam setiap proses capture ternyata cahaya, warna, posisi, skala, dan kemiringan menjadi suatu masalah yang perlu diperhatikan. Citra digital merupakan representatif dari citra yang diambil oleh mesin dengan bentuk pendekatan berdasarkan sampling dan kuantisasi. Sampling menyatakan besarnya kotak-kotak yang disusun dalam baris dan kolom. Dengan kata lain sampling pada citra menyatakan besar kecilnya ukuran pixel (titik) pada citra, dan kuantisasi menyatakan besarnya nilai tingkat kecerahan yang dinyatakan dalam nilai tingkat keabuan (grayscale) sesuai dengan jumlah bit biner yang digunakan oleh mesin dengan kata lain kuantisasi pada citra menyatakan jumlah warna yang ada pada citra.
2.3 Pengenalan Pola
Pola adalah entitas yang terdefinisi atau didefinisikan melalui ciri-cirinya
(feature). Ciri-ciri tersebut digunakan untuk membedakan suatu pola dengan pola yang lainnya. Ciri yang baik adalah ciri yang memiliki daya pembeda yang tinngi, sehingga pengelompokan pola berdasarkan ciri yang dimiliki dapat dilakukan dengan keakuratan yang tinggi (Sitorus, Syahriol dkk, 2006).
Pengenalan pola merupakan cabang dari kecerdasan buatan yang saat ini berkembang pesat untuk mendukung aspek keamanan suatu sistem. Saat ini, aplikasi-aplikasi pengenalan pola juga sudah sangat beragam, di antaranya:
1. Voice recognition yang menggunakan pengenalan suara sebagai kunci bagi pengguna sistem.
3. Face identification yang menggunakan pengenalan wajah sebagai kunci bagi pengguna sistem, bahkan saat ini badan penegak hukum sedang mengembangkan sistem untuk mengidenfikasi para buronan dengan melakukan scanning pada wajah para pelaku kejahatan yang sudah di-database-kan berdasarkan foto pelaku kejahatan tersebut.
4. Handwriting identification yang menggunakan pengenalan tulisan yang telah secara luas digunakan oleh sistem perbankan untuk membuktikan pelaku transaksi adalah orang yang benar-benar berhak.
5. Optical Character Recognition (OCR) yang secara luas digunakan pada counter pengecekan barang.
6. Robot vision yang digunakan oleh aplikasi robotik dalam mengenali objek tertentu pada lingkungan yang unik.
2.3.1 Komponen Sistem Pengenalan Pola
Sistem pengenalan pola dasar terdiri dari (Al Fatta, Hanif, 2009): 1. Sensor
Sensor digunakan untuk menangkap objek yang ciri atau feature-nya akan diekstraksi.
2. Mekanisme Pre-processing
Mekanisme pengolahan objek yang ditangkap oleh sensor, bagian ini biasanya digunakan untuk mengurangi kompleksitas ciri yang akan dipakai untuk proses klasifikasi.
3. Mekanisme Pencari Feature
Bagian ini digunakan untuk mengekstraksi ciri yang telah melalui tahapan pre-processing untuk memisahkannya dari kumpulan ciri-ciri yang tidak diperlukan dalam proses klasifikasi dari suatu objek.
4. Algoritma Pemilah
2.4 Pengenalan Wajah (Face Recognition)
Secara umum sistem pengenalan citra wajah dibagi menjadi dua jenis, yaitu sistem feature-based dan sistem image-based. Pada sistem pertama digunakan ciri yang diekstraksi dari komponen citra wajah seperti mata,hidung, mulut, dan lain-lain yang kemudian dimodelkan secara geometris hubungan antara ciri-ciri tersebut. Sedangkan pada sistem ke dua menggunakan informasi mentah dari piksel citra yang kemudian direpresentasikan dalam metode tertentu, misalnya seperti Principal Component Analysis (PCA) atau transformasi wavelet yang digunakan untuk klasifikasi indentitas citra (Al Fatta, Hanif, 2009).
Alan Brooks pernah mengembangkan sebuah penelitian yang membandingkan dua algoritma yaitu Eigenface dan Fisherface. Penelitian ini difokuskan pada perubahan pose wajah apakah mempengaruhi akurasi pengenalan wajah. Diberikan database latih berupa foto wajah manusia, kemudian digunakan untuk melatih sebuah sistem pengenalan wajah, setelah proses latihan selesai, diberikan sebuah masukan image yang sebenarnya sama dengan salah satu image wajah pada fase latihan tetapi dengan pose yang berbeda. Sistem juga diharapkan
punya sensitifitas minimal terhadap pencahayaan.
Sistem dikembangkan dengan dua algoritma yaitu Eigenface dan Fisherface, dan dibandingkan hasilnya. Kedua teknik menghasilkan hasil yang
memuaskan tetapi ada beberapa perbedaan Pada Eigenface kompleksitas komputasi lebih sederhana daripada Fisherface. Dari segi efektifitas karena perubahan pose Fisherface memberikan hasil yang lebih baik, bahkan dengan data yang lebih terbatas. Teknik Eigenface juga lebih sensitif terhadap pencahayaan dibandingkan dengan Fisherface (Purwanto, Ari).
2.5 Eigenface
Salah satu arti perkataan “eigen” didalam bahasa Jerman adalah “asli”(“proper”); nilai eigen juga dikatakan nilai asli (proper value), nilai karateristik (characteristic value) atau akar laten (latent root) oleh beberapa penulis.
menyukai istilah eigenimage, dan teknik ini telah digunakan untuk pengenalan tulisan tangan, pembacaan bibir, pengenalan suara dan pencitraan medis.
Eigenface adalah sekumpulan standardize face ingredient yang diambil dari analisis statistik dari banyak gambar wajah (Layman dalam Al Fatta, Hanif, 2009).
Persamaan �� =�� ditemukan pada banyak aplikasi aljabar linear. Jika
persaamaan tersebut mempunyai penyelesaian tak nol x, maka � disebut sebagai nilai eigen (eigenvalue) dari A dan x disebut sebagai vector eigen (eigenvector) yang memiliki oleh �. (Howard,A.1981)
Untuk mencari nilai eigen dan vector eigen pembahasannya lebih lanjut sebagai berikut:
2.5.1 Eigenvalue dan Eigenvector
Nilai eigenvalue dari suatu matriks bujursangkar merupakan polynomial karakteristik dari matriks tersebut; jika λ adalah eigenvalue dari A maka akan ekuivalen dengan persamaan linier (A – λI) v = 0 (dimana I adalah matriks identitas) yang memiliki pemecahan non-zero v (suatu eigenvector), sehingga akan ekuivalen dengan determinan
det (A – λI) = 0 (2.1)
Fungsi p(λ) = det (A – λI) adalah sebuah polynomial dalam λ karena
determinan dihitung dengan sum of product. Semua eigenvalue dari suatu matriks A dapat dihitung dengan menyelesaikan persamaan pA(λ) = 0. Jika A adalah
matriks ukuran n x n, maka pA memiliki derajat n dan A akan memiliki paling banyak n buah eigenvalue.
Jika eigenvalue λ diketahui, eigenvector dapat dicari dengan memecahkan:
(A – λI) v = 0 (2.2)
Dalam beberapa kasus dapat dijumpai suatu matriks tanpa eigenvalue, misalnya:
�−01 10�
�= �2 1 1 3�
maka polynomial karakteristiknya dapat dicari sebagai berikut:
��� �(2− �) −1 0 3− ��=�
2−5�+ 6 = 0
ini adalah persamaan kuadrat dengan akar-akarnya adalah λ = 2 dan λ = 3.
Adapun eigenvector yang didapat ada dua buah. Eigenvector pertama dicari dengan mensubtitusikan λ = 3 ke dalam persamaan. Misalnya �0 adalah
eigenvector yang berasosiasi dengan eigenvalue λ = 3. Set �0 dengan nilai:
�0 =���0 0�
Kemudian subtitusikan �0 dengan v pada persamaan: ( A – λI) v = 0
sehingga diperoleh:
�(2−3)�0 + (−�0) = 0
0 + (3−3)�0 = 0
dapat disederhanakan menjadi:
−�0− �0 = 0 �����0 = −�0
sehingga eigenvector untuk eigenvalue λ = 3 adalah:
�0 =���0
0�=� � 0
−�0�=�0�
1 −1�
Hubungan antara eigenvalue dan eigenvector dari suatu matriks digambarkan oleh persamaan :
�.�� =��.�� (2.3)
Prinsip dasar dari pengenalan wajah adalah dengan mengutip informasi unik wajah
tersebut kemudian di-encode dan dibandingkan dengan hasil decode yang
sebelumnya dilakukan. Dalam metode eigenface, decoding dilakukan dengan
menghitung eigenvector kemudian direpresentasikan dalam sebuah matriks yang
berukuran besar.
Algoritma Eigenface secara keseluruhan cukup sederhana. Image Matriks (Γ) direpresentasikan ke dalam sebuah himpunan matriks (Γ1,Γ2, … ,Γ�). Cari nilai
rata-rata (Ψ) dan gunakan untuk mengekstraksi eigenvector (v) dan eigenvalue (λ) dari himpunan matriks. Gunakan nilai eigenvector untuk mendapatkan nilai eigenface dari
image. Apabila ada sebuah image baru atau test face (���) yang ingin dikenali,
proses yang sama juga diberlakukan untuk image (Γ���), untuk mengekstraksi eigenvector (v) dan eigenvalue (λ), kemudian cari nilai eigenface dari image test face
(���). Setelah itu barulah image baru (���) memasuki tahapan pengenalan dengan menggunakan metode euclidean distance. Tahapan selengkapnya yaitu:
Tahapan Perhitungan Eigenface:
1. Langkah pertama adalah menyiapkan data dengan membuat suatu himpunan S yang terdiri dari seluruh training image Γ1,Γ2, … ,Γ� .
S = {Γ1,Γ2, … ,Γ�}
2. Langkah kedua adalah ambil nilai tengah atau mean (Ψ)
Ψ= �1∑��=1Γ� (2.4)
3. Langkah ketiga kemudian cari selisih (Ф) antara training image (Γ�) ( dengan nilai tengah (Ψ)
Φi = Γ� − Ψ (2.5)
4. Langkah keempat adalah menghitung nilai matriks kovarian (C) � = 1
�∑��=1Φ�Φ�� = ��� (2.6)
�=��� �=���
� ×�� = �� × �� (2.7)
6. Langkah keenam, setelah eigenvector (v) diperoleh, maka eigenface (µ) dapat dicari dengan :
μi =∑��=1v���� (2.8)
�= 1, … ,�
Tahap pengenalan :
1. Sebuah image wajah baru atau test face (���) akan dicoba untuk dikenali, pertama terapkan cara pada tahapan pertama perhitungan eigenface untuk mendapatkan nilai eigenface dari image tersebut.
���� = �. ( Γ��� − Ψ) (2.9)
Ω = [�1,�2, . . ,��′]
2. Gunakan metode Eucladien Distance untuk mencari jarak (distance)
terpendek antara nilai eigenface dari training image dalam database dengan eigenface dari image test face.
�� = ||Ω − Ω�|| (2.10)
2.6 Mikrokontroler
Mikrokontroler adalah suatu sistem komputer lengkap dalam satu chip. Lengkap dalam artian memiliki unit CPU, port I/O (paralel dan serial), timer, counter, memori RAM untuk penyimpanan data saat eksekusi program, dan memori ROM
tempat dari mana perintah yang akan dieksekusi. Dan merupakan suatu komponen elektronik kecil yang mengendalikan operasi komponen elektronik lain pada suatu sirkuit elektronik.
2.6.1 Bahasa Pemrograman Mikrokontroler ATMega8535
mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C. Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar.
Bahasa C memiliki keuntungan-keuntungan yang dimiliki bahasa assembler (bahasa mesin), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa pemrograman tingkat tinggi dan assembly.
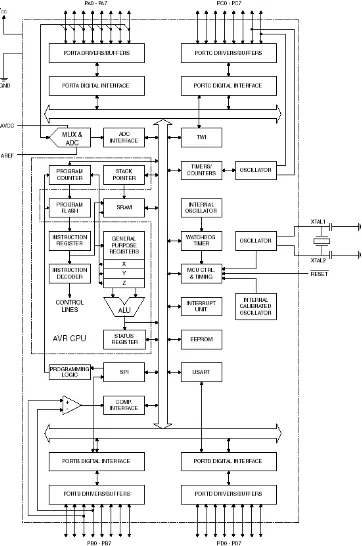
2.6.2 Arsitektur AVR ATMega 8535
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua intruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 (satu)
siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Selain itu AVR berteknologi RISC (Reduced Instruction Set Computing).
Secara garis besar arsitektur mikrokontroler ATMega8535 memiliki
bagian sebagai berikut :
1. Port I/O 32 bit, yang dikelompokkan dalam Port A, Port B, Port C dan Port D.
2. Analog to Digital Converter 10-bit sebanyak 8 input. 3. Timer/counter sebanyak 3 buah dengan compare mode. 4. CPU 8 bit yang terdiri dari 32 register.
5. SRAM sebesar 512 byte.
6. Memory Flash sebesar 8 Kbyte dengan kemampuan read while write. 7. Interupsi Internal maupun eksternal.
8. Port Komunikasi SPI.
9. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 10.Analog Comparator.
Frekuensi clock maksimum 16 MHz. 12.PORT USART untuk komunikasi serial.
Media penyimpan program berupa flash memory, sedangkan penyimpan data berupa SRAM (Static Random Acces Memory) dan EEPROM (Electrical Erasable Programmable Read Only Memory). Untuk komunikai data tersedia fasilitas SPI (Serial Peripheral Interface), USART (Universal Shynchronous and Asyncrhonous Serial Receiver and Transmitter), serta TWI (Two-wire Serial Interface). Di samping itu terdapat fitur tambahan, antara lain AC (Analog Comparator), 8 kanal 10-bit ADC (Analog to Digital Converter), 3 buah Timer/Counter, WDT (Watchdog Timer), manajemen penghematan daya (Sleep Mode), serta osilator internal 8 Mhz. seluruh fitur terhubung ke bus 8 bi. Unit interupsi menyediakan sumber interupsi hingga 21 macam.
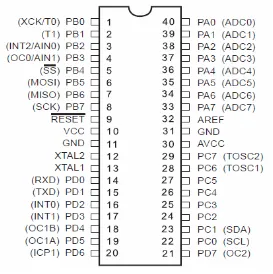
2.6.3 Konfigurasi pin Mikrokontroler ATmega 8535
Di bawah merupakan konfigurasi pin mikrokontroler AVR ATmega 8535 yaitu : 1. VCC : merupakan pin yang berfungsi sebagai masukan pin catu daya. 2. GND : merupakan pin ground.
3. Port A (PA0..PA7 : merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu timer/counter, komparator analog dan SPI.
5. Port C (PC0..PC7) : merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu TWI, komparator analog, input ADC dan Timer Oscilator.
6. Port D (PD0..PD7) : merupakan pin I/O dua arah dan pin fungsi khusus yaitu komparator analog, interupsi eksternal dan komunikasi serial. 7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 dan XTAL2 : merupakan pin masukan clock eksternal.
9. AVCC : merupakan pin masukan tegangan untuk ADC. 10.AREF : merupakan pin masukan tegangan referensi ADC.
Gambar 2.2 Konfigurasi Pin Mikrokontroler ATmega8535
2.7 Motor DC
Peranti mikroprosesor pada umumnya sangat terbatas dalam kemampuan mancatu daya pada keluarnya, tidak lebih 20mA. Ini tentunya tidak mencukupi untuk menggerakkan peralatan seperti motor, pemanas, lampu, atau lain-lainnya, sehingga dibutuhkan rangkaian penggerak berupa penguat daya (power amplifier) atau saklar daya. Dalam sistem kontrol juga dibutuhkan penginderaan keluaraan sistem sebagai umpan balik, yang dalam banyak hal berupa kecepatan. Sinyal masukan bagi pengontrol ini dapat berupa sinyal analog maupun sinyal diskrit (sederhana pulsa).
balikk dari keluaran yang diidera/diukur dengan sensor arus, posisi rotor, kecepatan putaran, atau arah putaran.
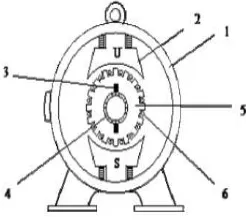
Motor dc dapat berfungsi sebagai motor apabila didalam motor listrik tersebut terjadi proses konversi dari energi listrik menjadi energi mekanik. Motor dc itu sendiri memerlukan suplai tegangan yang searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Pada motor dc kumparan medan disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
Gambar 2.3 Bagian-Bagian Motor DC
Bagian – bagian motor dc secara umum, yaitu : 1. Badan Mesin
Badan mesin ini berfungsi sebagai tempat mengalirnya fluks magnet yang dihasilkan kutub magnet, sehingga harus terbuat dari bahan ferromagnetik. Fungsi lainnnya adalah untuk meletakkan alat-alat tertentu dan mengelilingi bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar kuat, seperti dari besi tuang dan plat campuran baja.
2. Inti kutub magnet dan belitan penguat magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan mesin.
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas, dan juga memegang peranan penting untuk terjadinya proses komutasi.
4. Komutator
Komutator ini berfungsi sebagai penyearah mekanik yang akan dipakai bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi terjadi pada saat sisi kumparan berbeda.
5. Jangkar
Jangkar dibuat dari bahan ferromagnetik dengan maksud agar kumparan jangkar terletak dalam daerah yang induksi magnetiknya besar, agar ggl induksi yang dihasilkan dapat bertambah besar.
6. Belitan jangkar
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah, berfungsi untuk tempat timbulnya tenaga putar motor.
2.7.1 Motor servo
Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam
potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sum berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
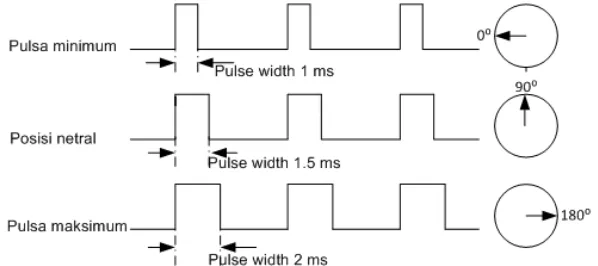
2.7.1.1 Prinsip kerja motor servo
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar
ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
Gambar 2.5 Sinyal Lebar pulsa motor servo
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
2.8 Webcam
2.8.1 Defenisi webcam
Webcam (web camera) adalah sebutan bagi kamera real-time (bermakna
world Wide Web, rogram instant messaging atau aplikasi video call. Webcam atau webcamera adalah sebuah kamera video digital kecil yang dihubungkan ke computer melalui port USB ataupun port COM.
Sekarang ini web camera yang ada dipasaran pada umumnya erbagi kedalam dua tipe : web camera permanen (fixed)dan revolving web camera. Pada web camera permanen terdapat pengapit untuk mengapit lensa standart di posisi yang diinginkan untuk menangkap gambar pengguna. Sedangkan pada revoling web camera terdapat landasan dan lensa standart dipasang di landasan tersebut sehingga dapat disesuaikan ke sudut pandang yang terbaik untuk menangkap gambar pengguna. Berikut contoh webcam laptop.
Gambar 2.6 webcam Laptop
2.8.2 Cara Kerja Webcam
Sebuah web camera biasanya dilengkapi dengan software, software ini mengambil gambar-gambar dari kamera digital secara terus menerus ataupun dalam interval waktu tertentu dan menyiarkannya melalui koneksi internet.
2.9 USB to TTL sebagai Komunikasi Data Serial
Untuk dapat berkomunikasi antara mikrokontroler dengan PC, maka diperlukan suatu penyetaraan level tegangan. Besarnya level tegangan komunikasi serial untuk mikrokontroler diantara 0 – 3,3volt. Akan tetapi untuk tegangan komunikasi serial computer sekitar -15 sampai 15volt. Agar kedua piranti dapat berkomunikasi satu sama lain maka diperlukan sebuah converter agar level tegangannya setara. Salah satu converter yang dapat digunakan adalah dengan menggunakan kabel USB to serial converter yaitu USB TTL yang dihubungkan dengan komputer.
Mikrokontroler terhubunng langsung dengan USB to TTL melalui pin 14 (RXD), pin 15(TXD) dan pin 11 (GND). USB to TTL, menggunakan PL2303 ditunjukkan pada gambar berikut.