Beyond Lego Mindstorms: Analytical and Experimental Minds
Tri Kurniawan Wijaya
Department of Computer Science,Sekolah Tinggi Teknik Surabaya Surabaya 60284, Indonesia
Gunawan
Departement of Electrical Engineering, Sepuluh NopemberInstitute of Technology Surabaya 60111, Indonesia
Arya Tandy Hermawan
Information Technology GraduateProgram,
Sekolah Tinggi Teknik Surabaya Surabaya 60284, Indonesia
Abstract
Lego Mindstorms is a robotic tool which perfectly safe to use in the educational environment. Even children and teenager can touch and program it without a fear about the electricity. Because of this, we develop the use of Lego Mindstorms robotic tool to arouse analytical and experimental minds of the students.
In this paper we presented the important of thinking and finding ideas and then implementing it to solve the problem given. In fact, there are many things for students to do. Students have to test and change their not-worked solution many times before they find the worked solution and reach the goal. These are what required in constructivist learning and constructionist educational philosophy which is very important and absolutely have a big and positive impact in motivating students to learn and explore the world surrounds them.
1. Lego Mindstorms
1.1. History
The story behind LEGO Mindstorms is, in reality, a fascinating narrative of how three organizations: Resnick and Papert’s Epistemology and Learning research group, the LEGO Corporation, and the MIT Media Laboratory— engaged in a complex social interaction, which shaped the evolution of the technology [1]. Each group had its own interests and ideas of what success meant. Thus, each organization influenced the development of the Mindstorms product and its Media Lab prototypes in different ways.
The Epistemology and Learning group, for instance, endeavored to create and disseminate new Constructivist approaches to learning. The LEGO Company also aspired to provide Constructivist approaches to learning, while wanting their brand ―to be the strongest in the world
among families with children‖. Finally, the MIT Media Lab sought to create a new and publicly visible model of academic research that emphasizes the public impact of ideas, fosters idea transfer between academic research groups and corporate sponsors, and encourages community outreach. Ultimately, the Lab provided an environment for the research that led to the Mindstorms product to grow and mature.
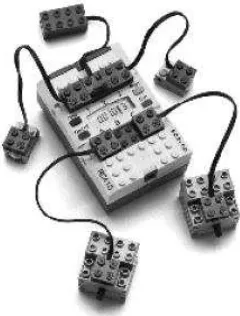
1.2. RCX
Figure 1. RCX Mindstorms
Finally, in 1997 Lego released RCX Mindstorms (see figure 1). Its programmable brick offered a 16MHz H8 CPU with 32 KB onboard RAM for firmware and user programs. Since the firmware had a 26 KB footprint, user programs were limited to approximately 6 KB of bytecodes. Its I/O complement featured three sensor ports (ports 1, 2, and 3), an infrared (IR) transceiver port for program download, and three motor ports (ports A, B, and C).
controlled remotely through IR signals or controlled directly through an onboard program. The immediate command mode allowed third-party packages such as LeJOS [2] and RCXLisp [3] to support AI projects such as robotic navigation or planning by running memory intensive, floating point portions of system code on a PC while running smaller remote-control programs on the RCX.
1.3. NXT
Nine years later Lego released the NXT (see figure 2). The hardware and firmware of the new kit’s programmable brick feature several advances over the RCX design. These include a local file system on 256KB flash RAM, 64KB RAM for program execution, a 48MHz ARM7 CPU with support for Bluetooth radio frequency (RF) communication, a large 100x64 pixel LCD display, a USB 2.0 port for program download, three output ports for attaching motors (ports A, B, and C) and four sensor ports (ports 1, 2, 3, and 4).
Figure 2. NXT Mindstorms
User programs can be as large as 160 KB (more if system sound files are removed from the flash RAM drive). NXT firmware uses the 64KB onboard RAM to allocate memory for programs in execution. The NXT supports ―immediate command‖ and ―program command‖ modes, but because it uses RF communication, line-of-sight issues with the RCX’s IR technology have been eliminated.
1.4. Further details about NXT
Here the more details specifications about NXT will be discussed. See figure 3 to understand further about NXT brick.
1.4.1. USB Port. USB cable can be connected to the USB
port and download programs from the computer to the NXT (or upload data from the NXT to the computer). The
wireless Bluetooth connection also can be used for uploading and downloading.
1.4.2. Loudspeaker. A program with sounds can be made
and the output sounds can be listened through the loudspeaker when the program run or let the robot communicate with the environment.
Figure 3. NXT details
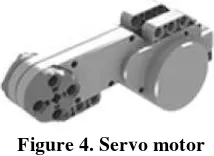
1.4.3. Servo motors. The three servo motors give you agent the ability to move (see figure 4). With the Lego Mindstorms NXT software the motors are even able to synchronize, so that an agent having one motor for each side could move in a straight line.
Figure 4. Servo motor
1.4.4. Built-in Rotation Sensor. The motors can be used
1.4.5. Touch Sensor. The touch sensor (see figure 5) detects when it is being pressed by something and when it is released again.
Figure 5. Touch Sensor
1.4.6. Sound Sensor. The sound sensor (see figure 6) can detect both decibels (dB) and adjusted decibels (dBA).
dB: in detecting standard (unadjusted) decibels, all sounds are measured with equal sensitivity. Thus, these sounds may include some that are too high or too low for the human ear to hear.
dBA: in detecting adjusted decibels, the sensitivity of the sensor is adapted to the sensitivity of the human ear.
In other words, these are the sounds that human ears are able to hear. The sound sensor can measure sound pressure levels up to 90 dB – about the level of a lawnmower. The sound sensor readings on the NXT are displayed in percent. The lower the percent, the quieter is the sound.
Figure 6. Sound Sensor
This list of examples can be used as an approximate reference:
4-5% is like a silent living room
5-10% would be someone talking some distance away
10-30% is normal conversation close to the sensor or music played at a normal level
30-100% are people shouting or music being played at a high volume
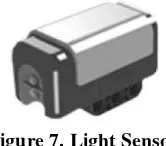
1.4.7. Light Sensor. The light sensor (see figure 7) enables the robot to read the intensity of reflected light and display intensity in percent.
Figure 7. Light Sensor
1.4.8. Ultrasonic Sensor. The ultrasonic sensor (see figure 8) can be used to measure distance and detect movement. Therefore it could be used for obstacle avoidance. The distance is measured in centimeters and in inches. The sensor is able to measure distances from 0 to 255 centimeters with a precision of ± 3 cm.
Figure 8. Ultrasonic Sensor
The sensor uses the same scientific principle as bats: it measures distance by calculating the time it takes for a sound wave to hit an object and return –just like an echo. Large sized objects with hard surfaces return the best readings. Objects made of soft fabric or those are curved (like a ball) or are very thin or small can be difficult for the sensor to detect. Note that two or more ultrasonic sensors operating in the same room may interrupt each other’s readings.
2. Related work
Previous research has shown that Lego Mindstorms is a powerful educational kit, suitable for teaching introductory science concepts, technology, and programming [4]. The use of the Lego Mindstorms allows students to learn and have fun at the same time while working within a motivational environment [5].
Ricca, Lulis, and Bade (2006) observed that Lego Mindstorms had a positive effect on problem solving skills in a fifth grade classroom [6]. They decide to formally test the use of the robots on critical thinking skills in grades five through eight.
But Lego Mindstorms is not all about fun. In more serious way, Klassner and McNally (2007) demonstrate the possibilities offered by the new NXT platform for Computer Science artificial intelligence curricular development [7]. They demonstrate the curricular materials developed in the LMICSE archive (Lego Mindstorms in Computer Science Education), including autonomous mobile robot localization and SLAM.
school teachers handled the process of converting an algorithm to a program in Lego Mindstorms programming tool [4]. They find that the teachers composed the algorithms easily in every step. The teachers used the natural language to make the pseudo-codes and then converted them to a program in a simple manner.
3. Basic ideas
The exploitation of the Lego Mindstorms in education falls in step with the concept of constructivist learning and the constructionist educational philosophy. Papert has mentioned that constructionism is built on the assumption that children will do best by finding for themselves the specific knowledge they need; organized or informal education can help most by making sure they are supported morally, psychologically, materially, and intellectually in their efforts [8]. These theories argue that children are much more motivated for learning when they can explore the world that surrounds them in a natural way.
In a constructionist environment, students act like ―real-world‖ scientists, inventors and engineers. So, as a result, students are in much closer contact with the truly important ideas of science and engineering. They do not simply learn facts, equations, and techniques. They learn a way of thinking critically and systematically about problems, and especially in view of the fact that they learn about the problem-solving process itself.
In contrast with the traditional learning environments, the constructivist approach provides tools, which allow children to build their own knowledge. In constructivism, children are explorers of knowledge rather than simple receivers of knowledge. Lego Mindstorms is one of the tools.
On the other hand, computational thinking is a fundamental skill for everyone, not just for computer scientists. However, computer programming is a difficult process. Beyond knowing the syntax of a programming language, this cognitive process requires several skills.
Both analytical and experimental minds need computational thinking. But, rather than achieve them through computer programming, we used constructivist and constructionist approach with Lego Mindstorms as the tool. Students will brainstorm to find an idea, build the robot, and then program it to solve the problem.
4. Analyze and experiment
Problem solving and critical thinking are two abilities widely considered important outcomes of education. In addition to the need for students to develop critical thinking and problem solving skills, there is need for research into the development of these skills in students.
Relatively little is known about the processes by which these students’ problem solving abilities grow, and it is therefore difficult to integrate the development of these cognitive skills into the standard curriculum of the traditional school.
While there are many environments that may promote the development of problem solving and critical thinking, the use of an environment that involves robotics may be appropriate for students for several reasons. First, the design, construction, and programming of robots can obviously be used to address standards: ―design a device that will be useful in solving the problem‖. Second, from a student point of view, the work with robots can be quite motivational. Third, the use of robots may provide for opportunities to collect rich data about student thinking in situ. Fourth, a robotics curriculum would be in line with recent emphasis from the government on the promotion of science, technology, engineering, and mathematics education.
The motivation for using Lego Mindstorms was to put a practical twist to student learning which led to awaken analytical mind. Students can use the scientific method when using the robots. The students had to read and follow directions, make a hypothesis, test their hypothesis, record results, and implement corrections for each run. Once a challenge was completed, it needed to be reproduced to validate results.
The following will explain how Lego Mindstorms can arouse analytical minds on every student.
4.1. Project 1: Observing the impact of gear and
tire on the speed
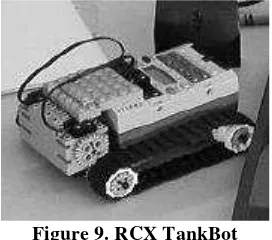
Using Lego bricks, light and sound sensors, motors, and gears, teams built robots to complete class assignments and eventually compete in a Lego Classroom Tournament. Groups of three students each, with each member having a specific job—builder, programmer, and scribe—were created; each member had to have knowledge of the other two jobs.
Figure 9. RCX TankBot
The first exercise in basic geometry (radius and circumference) was conducted by measuring the circumference on all the tires on the bots and recording the results. This was done by wrapping a string around the tire, marking it, and measuring the string for circumference. Students then measured the diameters of the tires, recorded the results in journals, multiplied all results by 3.14, and calculated the circumference. The calculated results were compared to the measured results.
Various experiments using the robots based on [6] were conducted. The first task involved the understanding of the relationship between tire and gear size. Students ran their robots using different size tires and gears, and compared the results. Overviews of these experiments follow.
Task 1:
Place tires on robots, a set at a time
Program their robot to go ten seconds
Record the results after each run to determine how far their robot has traveled with direct drive.
Task 2:
Put gears on their robots; start with a small gear on the motor and the medium gear on the axles
Run their robot using all three different size tires to see how far their robot has traveled with this type of gearing
Record their results after each run Task 3:
Place small gear on the motor and the big gear on the axles
Run their robot with all three sets of tires and record results after each run
Task 4:
Place the medium gear on the motor with the small gear on the axles
Run all three tires and record their results after each run
Task 5:
Place the medium gear on the motor and the large gear on the axles
Run their robot with all three different tires and record their results after each run
Task 6:
Place the large gear on the motor and the small gear on the axles
Run their robot and record their results
Results were collected, written in journals, compared and analyzed. They have to take a connection between the gear, the tire and the distance travel by their robot. Although not all students might understand gear ratio, they did understand how different size gears coupled with different sized tires can affect a robot’s travel. Students wrote reports comparing, contrasting and analyzing the results.
4.2. Project 2: Expanding horizon
The project still is a team project and is supported by 6 worksheets, corresponding to 6 tasks. The project was adopted from [4]. It is a project about car robot. For each task, the team had to:
(a) Make the appropriate algorithm - think and write on a paper sheet the sequence of actions in their natural language (a pseudo-code) in order to describe the algorithm.
(b) Build the robot they need. The robot should be a car-like robot. The same robot building may use to solve more than one set of problem.
(c) Convert the pseudo-code to a program using any Lego Mindstorms programming environment, in order to verify the algorithm made and to program the car robot.
(d) Test it.
Every time, the team could see the result of their program and could make it again and again, if necessary, trying to find out the correct solution. Here the six tasks on project 2:
Task 1:
Move the car forward for a specific time interval and then stop it
Turn the car around for a specific time interval and then stop it.
Turn the car around (in the same direction as above) for a random time interval (between 0 – x seconds) and then stop it.
Turn the car around (in the same direction) for a random time interval (between 0 – x seconds), after this turn it round again but to the opposite direction for a random time and then stop it.
Task 4:
Mount a light sensor on the car.
Place the car on different locations in the room.
Keep writing the different values of the light sensor.
Keep writing again the different values of the light sensor when a white or a black paperboard is been placed about 15-25 centimeters in front of the car.
Keep writing the value of the light sensor without any paperboard in front of the car.
Task 5:
The car is stopped.
Move the car forward when a black paperboard is been placed in front of the sensor and not responding when a white paperboard is been placed in front of x seconds), then stop it and if a black paperboard is placed in front of the car then the green lamp should turn on, otherwise if a white paperboard is placed in front of the car then nothing should happen.
When all team complete the project, a discussion took place based on a set of questions (semi-structured group interview), in order to evaluate the whole procedure and explore the opinion with regards to:
(a) The brainstorming process to find an idea to solve
All of the process in turning their own ideas into reality (robot building and programming) will deliver them to an experience in becoming a ―mini‖ scientist. They will experiment and experiment again just like the real scientist. When the first idea does not work, they would
have to implement the second idea. The second idea does not work, they will analyze why it does not work, what is the problem, develop a new solution, and then implement it for the third attempt. The process will repeat again and again until they find the satisfied solution. The experiences do not occur in traditional school, even in computer programming. In traditional school, student only ask to receive information, write it down, without practicing it to their real life, without build and development ideas. In computer programming, it is enough with the good program. But in this case, Lego Mindstorms robotic (and robotic application elsewhere), it is not enough with the right program, but also the right robot building.
By completing each task, students know by their own effort that building a robot without a program to operate it will be useless because the robot can not do anything (the robot can not move to anywhere). But, a right program without the right building also would be disappointed. In addition, an amazing robot building without supported by the right program is useless.
Lego Mindstorms is an important tool that motivates students to think, analyze, create, build, develop, and research logically and rationally. It also can be used to help students in language development through writing down the process of how the solved the problem.
6. References
[1] D. Mindell, ―LEGO Mindstorms The Structure of an Engineering (R)evolution‖, 6.933J Structure of Engineering Revolutions, 2000.
[2] Bagnall, B., Core LEGO MINDSTORMS Programming: Unleash the Power of the Java Platform, Prentice Hall, New Jersey, 2002.
[3] F. Klassner, ―Enhancing Lisp Instruction with RCXLisp and Robotics‖, 35th SIGCSE Technical Symposium on Computer Science Education, ACM Press, Virginia, 2004, pp. 214-218.
[4] A. Karatrantou, C. Panagiotakopoulos, ―Algorithm, Pseudo-Code and Lego Mindstorms Programming‖,
International Conference on Simulation ,Modelling and Programming for Autonomous Robots, Venice-Italy, 3-4 November 2008, pp. 70-79.
[6] B. Ricca, E. Lulis, D. Bade, ―Lego Mindstorms and the Growth of Critical Thinking‖, Dominican University, 2006.
[7] F. Klassner, M. McNally, ―Demonstrating the Capabilities of MindStorms NXT for the AI Curriculum‖, American Association for Artificial Intelligence, 2007.
[8] Papert, S., The Children's Machine. Rethinking School in the Age of the Computer, Basic Books, New York, 1993.
[9] Pfeifer, R., Tutorial for Programming the LEGO®
MINDSTORMS™ NXT, University of Zurich, Department
of Informatics, Artificial Intelligence Laboratory, 2007.
[10] F. Klassner, ―A Case Study of LEGO Mindstorms Suitability for Artificial Intelligence and Robotics Courses at the College Level‖, SIGCSE, ACM Press, Kentucky, 27 February – 3 March 2002, pp. 214-218.
[11] S. Kelly, A. Schuster. ―Application of a Fuzzy Controller on a Lego Mindstorms Robot‖, University of Ulster at Jordanstown, Northern Ireland, 2004
[12] M. McNally, F. Klassner, C. Continanza, ―Exploiting MindStorms NXT: Mapping and Localization Projects for the AI Course‖, American Association for Artificial Intelligence, 2007.
[13] C. Langer, C. Strothotte, ―The Benefits of Integrating Lego Mindstorms into Design Education Course Media Systems‖, International Conference on Engineering and Product Design Education, Northumbria University, Newcastle Upon Tyne, United Kingdom, 13-14 September 2007.
[14] J. Simpson, C.L. Jacobsen, M.C. Jadud, ―A Native Transterpreter for the Lego Mindstorms RCX‖,