RANCANG BANGUN WAHANA PERMUKAAN TAK
BERAWAK (
UNMANNED SURFACE VEHICLE
(USV))
MAHESA GLAGAH AGUNG SATRIA
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Rancang Bangun Wahana Permukaan Tak Berawak (Unmanned Surface Vehicle (USV)) adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, November 2015
Mahesa Glagah Agung Satria
ABSTRAK
MAHESA GLAGAH AGUNG SATRIA. Rancang Bangun Wahana Permukaan Tak Berawak (Unmanned Surface Vehicle (USV)). Dibimbing oleh INDRA JAYA dan YOPI NOVITA.
Wahana permukaan tak berawak (unmanned surface vehicle (USV)) merupakan sebuah wahana (vehicle) berbentuk kapal di permukaan (surface) air yang dapat bergerak tanpa awak di dalamnya. USV dapat digunakan di perairan yang tidak dapat dilalui kapal dengan awak. Perkembangan USV di dunia sudah pesat, namun tidak diimbangi perkembangannya di Indonesia. Penelitian ini bertujuan membuat USV yang bersifat semi-autonomous secara sederhana. Tahapan pembuatannya meliputi perancangan alat, uji laboratorium dan uji lapang. Perancangan alat terdiri dari pembuatan cashing, perancangan elektronik, dan perancangan perangkat lunak. USV yang dibuat dapat bergerak secara otomatis (autonomous) mengikuti waypoint yang telah dibuat dan dapat bergerak secara manual dengan kendali menggunakan remote. Uji laboratorium dilakukan dengan mengukur waktu oleng wahana di atas air dan mengukur akurasi GPS. Uji lapang dilakukan dengan menjalankan wahana pada lintasan berbentuk lurus, zigzag, parallel, dan berbentuk seperti huruf S. Waktu oleng wahana sebesar 3 detik, akurasi GPS pada CEP 50% sebesar 1,9377 meter dan pada 2DRMS 95% sebesar 4,757 meter. Nilai error didapatkan dari selisih jarak antara titik waypoint dengan lintasan aktual yang dilalui oleh wahana terhadap sumbu x dan sumbu y. Nilai error terbesar pada sumbu x sebesar 4,82 meter yaitu pada lintasan parallel, sedangkan pada sumbu y sebesar 4,49 meter yaitu pada lintasan berbentuk huruf S. Pada uji lapang, wahana melaju dengan kecepatan 0,822 m/s atau sekitar 1,59784 knot. Kata kunci: 2DRMS, CEP, GPS, katamaran, USV, waypoint
ABSTRACT
MAHESA GLAGAH AGUNG SATRIA. Designing and Constructing Unmanned Surface Vehicle (USV). Supervised by INDRA JAYA and YOPI NOVITA.
Unmanned surface vehicle (USV) is a vehicle that move on the water surface without a crew in it. USV development in the world has been rapid, but not in Indonesia. This research aims to make USV that are semi-autonomous system. Stages of manufacturing includes design and contructing, laboratory tests and field test. Designing and constructing consists of manufacture of cashing, electronic box, and software development. USV can be moved automatically to follows the waypoint that was created and can also be moved manually using the remote control. Laboratory tests conducted by measuring rolling duration on the water and measure the accuracy of GPS. Rolling duration is around 3 s, the accuracy of GPS in CEP 50% is 1,9 m and in 2DRMS 95% is 4,7 m. Field test were conducted by running a vehicle on a straight path, zigzag, parallel, and “S” path. Error values were obtained from difference distance between waypoint with the actual path on the x-axis and y-axis. Highest error values on the x-axis is 4,8 m which is on parallel trajectory, while the y-axis is 4,4 m which is on “S” trajectory. In the field test, the vehicle drove at 0,8 m/s of speed, or about 1,6 knots.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan
pada
Departemen Ilmu dan Teknologi Kelautan
RANCANG BANGUN WAHANA PERMUKAAN TAK
BERAWAK (
UNMANNED SURFACE VEHICLE
(USV))
MAHESA GLAGAH AGUNG SATRIA
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Rancang Bangun Wahana Permukaan Tak Berawak (Unmanned Surface Vehicle (USV))
Nama : Mahesa Glagah Agung Satria NIM : C54110065
Disetujui oleh
Prof. Dr. Ir. Indra Jaya, M.Sc Pembimbing I
Dr. Yopi Novita, S.Pi, M.Si Pembimbing II
Diketahui oleh
Dr. Ir. I Wayan Nurjaya, M.Sc Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kehadirat Allah SWT atas berkat rahmat dan hidayah-Nya penulis dapat menyelesaikan karya ilmiah yang berjudul “Rancang Bangun Wahana Permukaan Tak Berawak (Unmanned Surface Vehicle (USV))”. Karya tulis ini diajukan sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan pada Fakultas Perikanan dan Ilmu Kelautan.
Ucapan terima kasih penulis sampaikan kepada:
1. Prof. Dr. Ir. Indra Jaya, M.Sc dan Dr. Yopi Novita, S.Pi, M.Si selaku dosen pembimbing yang selalu memberi arahan serta masukan yang berharga. 2. Dr. Ir. Tri Prartono, M.Sc selaku dosen penguji tamu atas kesediaan, kritik dan
saran yang telah diberikan.
3. Keluarga atas dukungan dan doanya.
4. Staf Laboratorium Akustik dan Instrumentasi Kelautan.
5. Staf pengajar dan administrasi dari Program Studi Ilmu dan Teknologi Kelautan.
6. Aditya Ramanda dan Billi Rifa Kusumah sebagai teman diskusi dalam penelitian.
7. Muhammad Iqbal, S.Pi, M.Si yang senantiasa memberi masukan dan banyak ilmu baru.
8. Nuris Setyowati atas masukan dan motivasi dalam penyelesaian skripsi. 9. Teman-teman Diklat MIT-03 dan seluruh keluarga besar MIT Club yang
mengajarkan banyak ilmu bermanfaat.
10. Teman-teman ITK 48 yang memberikan semangat tersendiri bagi penulis. 11. Pihak-pihak yang membantu penulis dalam menyelesaikan skripsi ini.
Penulis menyadari bahwa penulis hanyalah manusia biasa yang tak luput dari kekhilafan. Oleh karena itu, segala bentuk kritik dan saran yang membangun sangatlah diperlukan untuk memperbaiki kesalahan yang ada. Akhir kata semoga penelitian ini dapat digunakan untuk kemajuan dunia kelautan dan kesejahteraan masyarakat. Amin Ya Rabbal Alamin.
Bogor, November 2015
DAFTAR ISI
DAFTAR TABEL vi DAFTAR GAMBAR vi DAFTAR LAMPIRAN vi PENDAHULUAN 1 Latar Belakang 1 Tujuan Penelitian 1 Manfaat Penelitian 2 METODE 2Waktu dan Tempat Penelitian 2
Alat dan Bahan 2
Prosedur Penelitian 3
HASIL DAN PEMBAHASAN 10
Hasil Rancang Bangun 10
Uji Laboratorium 22
Uji Lapang 23
SIMPULAN DAN SARAN 28
Simpulan 28
Saran 28
DAFTAR PUSTAKA 28
LAMPIRAN 30
DAFTAR TABEL
1 Alat yang digunakan dalam penelitian 2
2 Bahan yang digunakan dalam penelitian 3
3 Konfigurasi Arduino dengan perangkat lain 13
DAFTAR GAMBAR
1 Tahapan pelaksanaan penelitian 4
2 Diagram alir pembuatan casing (Fyson 1985) 4 3 Desainwahana unmanned surface vehicle (USV) 5 4 Hubungan fungsional elektronik unmanned surface vehicle (USV) 6 5 Skematik rangkaian elektronik unmanned surface vehicle (USV) 7 6 Hasil rancang bangun wahana permukaan tak berawak (unmanned
surface vehicle (USV)) 11
7 Modul Arduino Mega 2560 12
8 Rangkaian elektronik Arduino Mega 2560 12
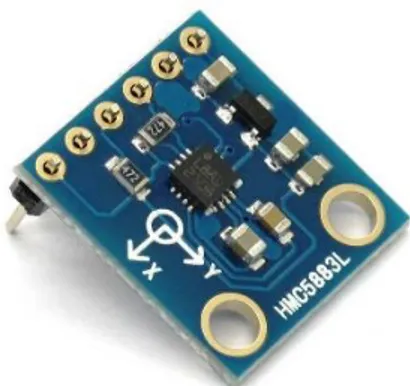
9 Modul HMC5883L 13
10 Rangkaian modul HMC5883L 14
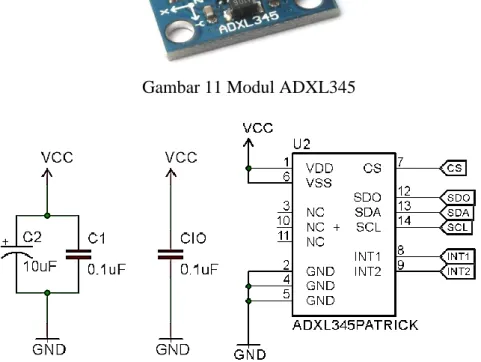
11 Modul ADXL345 14
12 Rangkaian modul ADXL345 14
13 Modul GPS u-blox Neo 6M (kanan) dan antena eksternal (kiri) 15
14 Data NMEA 0183 GPS 15
15 Modul mikro SD Catalex 16
16 Rangkaian modul mikro SD Catalex 16
17 Modul KYL-1020U 17
18 Diagram alir perangkat lunak unmanned surface vehicle (USV) 18 19 Tampilan user interface dengan Google Earth dan Python 20
20 Contoh waypoint yang digunakan 21
21 Grafik rolling duration unmanned surface vehicle (USV) 22 22 Uji akurasi GPS U-Blox Neo 6M selama 60 menit 23 23 Nilai error uji lintasan “lurus” pada sumbu x dan/atau sumbu y 24 24 Nilai error uji lintasan “zigzag” pada sumbu x dan/atau sumbu y 25 25 Nilai error uji lintasan “paralel” pada sumbu x dan/atau sumbu y 26 26 Nilai error uji lintasan “S” pada sumbu x dan/atau sumbu y 27
DAFTAR LAMPIRAN
1 Dokumentasi penelitian 30
PENDAHULUAN
Latar Belakang
Unmanned surface vehicle (USV) adalah suatu wahana tanpa awak yang dioperasikan di permukaan (surface) untuk keperluan tertentu. USV juga dikenal dengan sebutan autonomous surface vehicle (ASV) karena menggunakan global positioning system (GPS) dalam penentuan arah tujuan pergerakan wahana tersebut (Manley 2008). USV merupakan dasar inovasi dari teknologi muatan tinggi ( high-payload), desain kapal kecil berkecepatan tinggi dan sistem tak berawak untuk menyediakan kemampuan wahana permukaan tak berawak terhadap berbagai misi (Ru-jian et al 2010).
USV dapat digunakan di perairan yang tidak dapat dilalui oleh kapal dengan awak, termasuk lingkungan dengan tingkat ancaman yang tinggi atau area yang telah terkontaminasi nuklir, biologi, atau bahan kimia (Ru-jian et al 2010). Selain itu, USV juga dapat digunakan untuk survei perairan dangkal, militer untuk mengantar senjata, pengumpulan data lingkungan, dan berkoordinasi dengan wahana otomatis bawah air (AUV). Jika dibandingkan dengan AUV dalam sistem otomasi, tingkat akurasi USV jauh lebih baik dari AUV karena ketersediaan global positioning system (GPS) (Naeem et al 2007). Penggunaan USV dalam pemetaan batimetri memiliki beberapa keuntungan. Pertama, USV merupakan sebuah wahana tak berawak sehingga tidak membahayakan seseorang pada kondisi laut yang tidak terduga. Kedua, data yang didapatkan lebih baik karena posisi pemasangan sonar dan antena GPS yang berdekatan dan stabilitas yang lebih baik. Ketiga, adaptasi wahana terhadap keadaan laut dapat disesuaikan dengan kebutuhan. Keempat, pengoperasian secara otomatis dapat mengurangi human error dalam survei.
Perkembangan USV di dunia sudah pesat. Saat ini survei batimetri dan oseanografi dapat dilakukan dengan menggunakan USV, seperti Delfim, Sesamo, IRIS, SCOUT, dan ROAZ, yang dapat digunakan pada perairan tawar maupun laut (Ferreira et al 2009). Seiring berkembangnya ilmu pengetahuan dan teknologi USV untuk berbagai keperluan, perkembangan ini belum diikuti secara baik di Indonesia. Pengambilan data oseanografi maupun survei hidrografi di Indonesia pada umumnya menggunakan kapal riset yang membutuhkan tenaga manusia yang cukup banyak dan biaya operasional yang cukup besar, serta tidak dapat dioperasikan pada perairan dangkal ataupun pesisir dekat garis pantai. USV merupakan suatu pengembangan untuk mengatasi keterbatasan tersebut.
Tujuan Penelitian
Tujuan dari penelitian ini, yaitu :
1. Menghasilkan rancang bangun unmanned surface vehicle (USV) yang bersifat
semi-autonomous secara sederhana dan mudah digunakan.
2. Mendapatkan informasi mengenai kinerja unmanned surface vehicle (USV) yang telah dibuat.
2
Manfaat Penelitian
Penelitian ini memiliki manfaat yaitu :
1. Sebagai sarana pengembangan teknologi unmanned surface vehicle (USV) di Indonesia.
2. Sebagai metode alternatif untuk memudahkan dalam akuisisi data pada suatu perairan.
METODE
Waktu dan Tempat Penelitian
Penelitian dilakukan pada bulan Maret – September 2015. Perancangan dan pembuatan wahana dilakukan di Workshop, Laboratorium Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Uji coba wahana dilakukan di kolam Departemen MSP, danau LSI IPB dan Situ Gede.
Alat dan Bahan
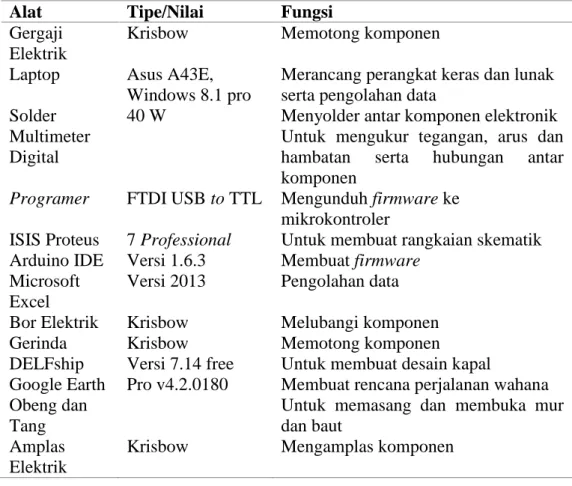
Alat yang digunakan dalam penelitian dapat dilihat pada Tabel 1. Tabel 1 Alat yang digunakan dalam penelitian
Alat Tipe/Nilai Fungsi
Gergaji Elektrik
Krisbow Memotong komponen
Laptop Asus A43E, Windows 8.1 pro
Merancang perangkat keras dan lunak serta pengolahan data
Solder 40 W Menyolder antar komponen elektronik Multimeter
Digital
Untuk mengukur tegangan, arus dan hambatan serta hubungan antar komponen
Programer FTDI USB to TTL Mengunduh firmware ke mikrokontroler
ISIS Proteus 7 Professional Untuk membuat rangkaian skematik Arduino IDE Versi 1.6.3 Membuat firmware
Microsoft Excel
Versi 2013 Pengolahan data Bor Elektrik Krisbow Melubangi komponen
Gerinda Krisbow Memotong komponen
DELFship Versi 7.14 free Untuk membuat desain kapal
Google Earth Pro v4.2.0180 Membuat rencana perjalanan wahana Obeng dan
Tang
Untuk memasang dan membuka mur dan baut
Amplas Elektrik
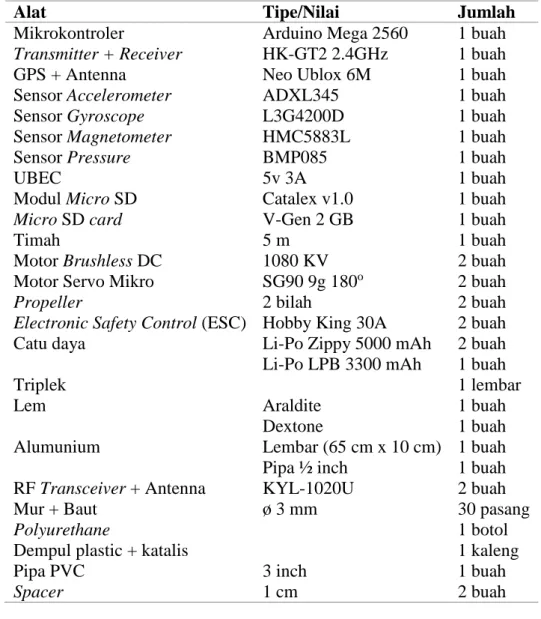
3 Bahan yang digunakan dalam penelitian dapat dilihat pada Tabel 2.
Prosedur Penelitian
Prosedur penelitian dilakukan dengan mengikuti tahapan sebagaimana disajikan pada Gambar 1. Tahapan penelitian diawali dengan melakukan perancangan alat yang terdiri dari perancangan mekanik, perancangan sistem elektronik dan perancangan perangkat lunak. Setelah melakukan perancangan alat, tahapan selanjutnya adalah melakukan uji laboratorium dan uji lapang.
Tabel 2 Bahan yang digunakan dalam penelitian
Alat Tipe/Nilai Jumlah
Mikrokontroler Arduino Mega 2560 1 buah
Transmitter + Receiver HK-GT2 2.4GHz 1 buah
GPS + Antenna Neo Ublox 6M 1 buah
Sensor Accelerometer ADXL345 1 buah
Sensor Gyroscope L3G4200D 1 buah
Sensor Magnetometer HMC5883L 1 buah
Sensor Pressure BMP085 1 buah
UBEC 5v 3A 1 buah
Modul Micro SD Catalex v1.0 1 buah
Micro SD card V-Gen 2 GB 1 buah
Timah 5 m 1 buah
Motor Brushless DC 1080 KV 2 buah
Motor Servo Mikro SG90 9g 180o 2 buah
Propeller 2 bilah 2 buah
Electronic Safety Control (ESC) Hobby King 30A 2 buah
Catu daya Li-Po Zippy 5000 mAh
Li-Po LPB 3300 mAh
2 buah 1 buah
Triplek 1 lembar
Lem Araldite 1 buah
Dextone 1 buah
Alumunium Lembar (65 cm x 10 cm) 1 buah
Pipa ½ inch 1 buah
RF Transceiver + Antenna KYL-1020U 2 buah
Mur + Baut ø 3 mm 30 pasang
Polyurethane 1 botol
Dempul plastic + katalis 1 kaleng
Pipa PVC 3 inch 1 buah
4
Gambar 1 Tahapan pelaksanaan penelitian
Perancangan Alat
Perancangan Mekanik / Casing
Casing yang dibuat merupakan badan kapal tempat komponen elektronik dan catu daya disimpan. Bentuk kapal dirancang dengan konsep kapal berjenis
katamaran. Tipe kapal ini memiliki dua buah lambung utama (hulls) yang simetris pada sisi kanan dan kiri. Konstruksi lambung yang demikian memungkinkan kapal bergerak (maneuver) lebih seimbang dengan ukuran kapal yang relative besar serta memiliki daya angkut yang lebih besar. Casing terdiri dari bagian atas (kerangka alumunium) dan bagian bawah (lambung kapal). Pembuatan casing mengikuti tahapan pada Gambar 2.
Mempersiapkan daftar barang muatan
Menghitung dimensi / ukuran wahana
Memilih jenis dan bentuk lambung kapal
Memperkirakan bobot wahana dengan dan tanpa muatan
Membuat desain rancangan wahana
Pemilihan material pembuatan wahana
Pembuatan wahana
Gambar 2 Diagram alir pembuatan casing (Fyson 1985)
Daftar barang muatan diperlukan untuk mengestimasi dimensi kapal yang akan dibuat. Dimensi kapal yang dibuat terdiri dari panjang kapal, lebar kapal, dan tinggi kapal disesuaikan dengan dimensi muatan yang akan diletakkan pada kapal. Kapal jenis katamaran dipilih karena pada penelitian ini lebih mengedepankan faktor daya muat dan stabilitas kapal dibandingkan kemampuan maneuver kapal. Lambung kapal dibuat berbentuk bundar untuk meminimalisir resistansi ketika
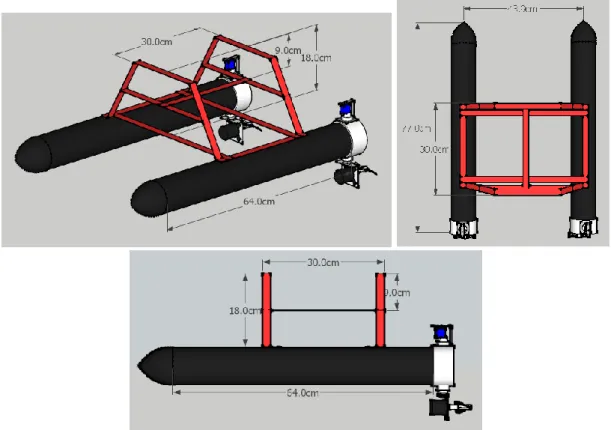
5 kapal melaju di atas permukaan air. Material yang digunakan dalam pembuatan wahana tersebut menggunakan pipa PVC yang mudah didapatkan dan juga memiliki bobot yang ringan, serta alumunium lembaran tebal 1 mm yang ringan. Sistem propulsi diletakkan pada bagian belakang hull untuk menggerakkan wahana di atas permukaan air. Penggunaan motor brushless pada propulsi dikarenakan motor brushless memiliki kecepatan yang cukup cepat yaitu 1060 rpm per volt dengan torsi yang cukup tinggi. Karena penggunaan motor brushless dengan kecepatan yang cukup tinggi maka propeller yang digunakan memiliki dua bilah baling-baling. Pembuatan wahana mengikuti desain seperti ditunjukkan pada Gambar 3.
Pembuatan lambung kapal menggunakan bahan pipa PVC yang diisi dengan busa poliuretan (polyurethane foam) untuk meminimalisir kemungkinan tenggelam akibat kebocoran. Menurut Manohar et al (2001), busa poliuretan lebih mudah dibentuk karena memiliki tekstur yang lebih lunak, serta memiliki stabilitas yang cukup signifikan dibandingkan dengan bahan lainnya. Pipa PVC dipilih sebagai bahan pembuatan lambung kapal karena memiliki konstruksi yang kuat dan kokoh, serta cukup mudah dalam pembuatannya sebagai lambung kapal. Setelah pembuatan lambung kapal dilanjutkan pembuatan rangka bagian atas kapal dengan menggunakan bahan alumunium.
Pembuatan kerangka dilakukan dengan menggunakan alumunium karena memiliki ketahanan terhadap air (tidak korosi) dan juga kuat dengan bobot yang ringan. Dua buah lambung kapal yang telah dibuat kemudian dihubungkan satu dengan lainnya menggunakan kerangka kapal tersebut.
6
Perancangan Sistem Elektronik
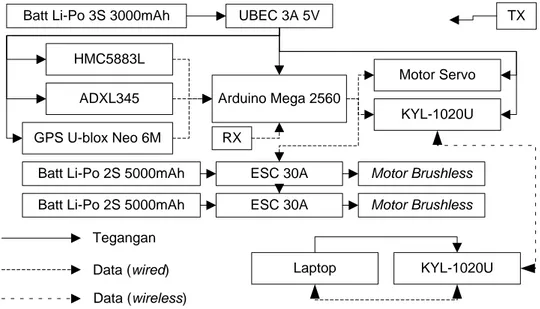
Sistem elektronik USV terdiri atas beberapa bagian, yaitu Arduino Mega 2560 sebagai pusat pengendali, GPS sebagai penentu posisi koordinat, HMC5883L sebagai penentu arah orientasi, ADXL345 sebagai sensor akselerometer, Electronic Speed Control sebagai driver pada motor brushless, motor brushless sebagai motor penggerak wahana, motor servo untuk mengendalikan arah gerak wahana, micro
SD sebagai media penyimpanan data, dan KYL-1020U untuk mengirimkan data ke
ground segment. Beberapa bagian membutuhkan pasokan daya yang berbeda dengan bagian yang lainnya. Bagian GPS, ADXL345, HMC5883L, micro SD, motor servo dan KYL-1020U membutuhkan pasokan daya 5VDC. Bagian motor
brushless dapat diberi pasokan daya hingga 12VDC (3 cell baterai Li-Po). RF
transmitter mengirimkan informasi posisi wahana dan data hasil akuisisi. Hubungan fungsional antara semua bagian elektronik dapat dilihat pada Gambar 4.
UBEC 3A 5V Arduino Mega 2560 HMC5883L ADXL345 GPS U-blox Neo 6M KYL-1020U Motor Servo Motor Brushless ESC 30A Tegangan
Data (wired) Laptop KYL-1020U
Data (wireless) Batt Li-Po 3S 3000mAh
Batt Li-Po 2S 5000mAh
Batt Li-Po 2S 5000mAh ESC 30A Motor Brushless RX
TX
Gambar 4 Hubungan fungsional elektronik unmanned surface vehicle (USV) Hubungan fungsional elektronik unmanned surface vehicle di atas dijadikan dasar dalam menghubungkan tiap komponen elektronik. Pembuatan rangkaian elektronik diawali dengan pembuatan skematik rangkaian elektronik. Skematik rangkaian elektronik dapat dilihat pada Gambar 5.
7
Gambar 5 Skematik rangkaian elektronik unmanned surface vehicle (USV) Perancangan Perangkat Lunak
Perangkat lunak pada sistem mikrokontroler disebut juga dengan firmware. Perancangan firmware dilakukan dengan menggunakan Arduino IDE versi 1.6.3.
Firmware yang telah dibuat kemudian diunduh ke mikrokontroller Arduino Mega 2560. Perangkat lunak yang dibuat memiliki empat fungsi utama yaitu, menentukan arah tujuan wahana berdasarkan waypoint, menerima data kompas, roll, posisi
8
koordinat berdasarkan GPS, melakukan penyimpanan data, serta mengirimkan data ke groud segment.
Wahana yang dibuat dapat bersifat autonomous. Menurut Taufik (2013), sistem navigasi pada wahana autonomous dapat diartikan sebagai suatu kemampuan untuk memandu pergerakan dari suatu posisi ke posisi yang lain yang dituju melalui penentuan posisi dan arah geraknya. Sistem navigasi wahana dirancang dengan berbasis posisi dengan metode waypoint. Data yang diterima oleh
ground segment ditampilkan dalam user interface. User interface didesain menggunakan bahasa pemrograman Python dan software Google Earth.
Uji Laboratorium
Tahap ini dilakukan untuk menentukan stabilitas dan akurasi GPS yang digunakan. Uji stabilitas dilakukan di kolam Departemen MSP. Uji stabilitas dilakukan dengan melihat gerak roll dan menghitung rolling duration, yaitu lama waktu yang dibutuhkan kapal saat oleng hingga kembali ke posisi semula. Kapal yang diuji diolengkan / dimiringkan pada kemiringan maksimal kemudian dilepas. Sudut yang terbentuk selama kapal oleng dicatat beserta waktunya untuk kemudian dibuat grafik. Persen reduksi oleng didapatkan dari perbandingan sudut oleng pertama dan oleng kedua. Persen reduksi oleng yang didapatkan kemudian dibandingkan dengan persen reduksi oleng kapal jenis mono hull yang didapatkan pada penelitian sebelumnya. Nilai sudut kemiringan kapal (roll) didapatkan dengan menggunakan sensor akselerometer ADXL345 dengan perhitungan sebagai berikut: ρ=arctan ( AX √AY2+AZ2 ) φ=arctan ( AY √AX2+AZ2) Keterangan : ρ = Pitch (derajat) φ = Roll (derajat)
Ax = Akselerasi pada sumbu x Ay = Akselerasi pada sumbu y Az = Akselerasi pada sumbu z (Tuck 2007)
Pengujian akurasi GPS dilakukan di Gedung Marine Center lantai enam dengan merekam data posisi pada satu lokasi selama satu jam. Data posisi yang telah didapatkan kemudian dihitung nilai standar deviasinya untuk dimasukkan pada analisa nilai akurasinya. Nilai akurasi GPS yang didapatkan saat uji laboratorium dibandingkan dengan nilai akurasi GPS yang didapatkan dari
datasheet GPS yang digunakan. Perhitungan nilai akurasi GPS dilakukan dengan menggunakan persamaan 3 dan 4.
... (1)
9
Keterangan :
σx = standar deviasi easting
σy = standar deviasi northing
CEP = Circular Error Probable
2DRMS = Twice the Distance Root Mean Square
(Pfost et al 1998)
Dalam menghitung nilai akurasi GPS, data posisi yang telah direkam dalam bentuk lintang dan bujur dikonversi ke dalam bentuk easting dan northing untuk memudahkan perhitungan.
Uji Lapang
Uji lapang dimaksudkan untuk menguji kinerja unmanned surface vehicle
(USV) dalam mengikuti rute yang ada. Uji lapang dilakukan di Situ Gede dengan menjalankan wahana berdasarkan waypoint yang telah ditentukan. Waypoint yang digunakan pada uji lapang membentuk suatu rute yang dibagi dalam empat buah rute, yaitu rute lurus, zigzag, parallel dan huruf S. Wahana dijalankan secara otomatis dan merekam data posisi berdasarkan GPS. Nilai posisi GPS saat wahana berjalan diselisihkan dengan waypoint yang ada untuk melihat seberapa besar selisih atau error jarak lintasan. Nilai error lintasan dibandingkan dengan nilai akurasi GPS yang telah didapatkan.
Wahana berjalan secara otomatis dengan menghitung jarak antara wahana dan lokasi waypoint yang dituju serta menghitung arah hadap kapal terhadap
waypoint. Wahana menghitung jarak terhadap waypoint dengan menggunakan persamaan haversine (5) dan untuk menghitung arah hadap kapal terhadap waypoint
dengan menggunakan persamaan 6.
a= sin2(∆φ 2⁄ )+ cos(φ1). cos(φ2).sin2( ∆λ 2⁄ ) c= 2.atan2(√a,√(1-a))
d= R.c ... (5) θ=atan2( sin ∆λ . cos φ2 , cos φ1. sin φ2- sin φ1. cos φ2. cos ∆λ ) ... (6) Keterangan :
𝜑 = latitude
𝜆 = longitude
R = jari-jari bumi (rataan jari-jari bumi = 6,371 Km) (Bhatia dan Saba 2013)
CEP= 0.59 (σx+ σy) ………... (3)
10
Selisih arah hadap wahana menuju waypoint dengan arah hadap wahana aktual digunakan untuk mengarahkan wahana agar wahana dapat mengarah dengan benar. Arah hadap kapal secara aktual didapatkan menggunakan sensor magnetometer HMC5883L dengan persamaan berikut :
He=arcTan ( Yh Xh⁄ ) ... (7) Keterangan :
He = Arah kompas (derajat)
Yh = Nilai pada sumbu y bidang datar magnet bumi Xh = Nilai pada sumbu x bidang datar magnet bumi (Caruso 2000)
Nilai Yh dan Xh mewakili bidang datar magnet bumi. Jika posisi wahana miring maka sudut kemiringan (roll, pitch) harus ikut diperhitungkan, sehingga digunakan persamaan berikut:
Xh=X* cos(ϕ)+Y* sin(θ)* sin(ϕ)-Z* cos(θ)* sin(ϕ)
Yh=Y* cos(θ)+Z* sin(θ) ... (8) Keterangan :
X = Nilai magnet pada sumbu x Y = Nilai magnet pada sumbu y Z = Nilai magnet pada sumbu z
𝛷 = Nilai pitch (derajat)
𝛩 = Nilai roll (derajat) (Caruso 2000)
HASIL DAN PEMBAHASAN
Hasil Rancang Bangun
Hasil rancang bangun unmanned surface vehicle (USV) pada penelitian ini dapat dilihat pada Gambar 6. Pembuatan hull kapal menggunakan bahan pipa PVC berukuran 3 inchi sehingga mudah untuk dibuat. Bagian rangka alumunium memiliki bobot yang ringan namun kokoh, sehingga tidak membuat bobot wahana menjadi berat. USV ini memiliki panjang total 77 cm, lebar total 52,5 cm dan tinggi total 50 cm sudah termasuk antena. Ukuran tersebut cukup ideal untuk muatan yang tidak terlalu berat.
11
Gambar 6 Hasil rancang bangun wahana permukaan tak berawak (unmanned surface vehicle (USV))
Wahana berbentuk kapal dengan tipe katamaran. Pemilihan tipe lambung katamaran dikarenakan tipe tersebut memiliki beberapa keunggulan, antara lain
power engine yang dipergunakan lebih kecil 45%, daya yang dihemat mencapai 40%, deck di atas kapal lebih luas serta menghasilkan sudut oleng yang relatif kecil (Hadi 2009).
Wahana menggunakan propeller berbahan alumunium dengan dua buah daun
propeller, diameter propeller 72 mm dan diameter hubpropeller 6,35 mm. Menurut Ismail (2010), propeller sangat berpengaruh terhadap kecepatan suatu kapal, karena fungsinya adalah mengubah daya putar dari motor menjadi daya dorong. Desain
propeller yang buruk menjadi penyebab borosnya bahan bakar, dalam hal ini baterai. Jumlah daun propeller mempengaruhi efisiensi propeller, semakin sedikit jumlah daun propeller maka semakin tinggi nilai efisiensi propeller. Beban yang ditanggung oleh masing-masing daun propeller akan semakin tinggi jika jumlah daun propeller semakin sedikit.
USV yang dilengkapi dengan perangkat elektronik memiliki bobot 4 kg, sedangkan bobot tanpa dilengkapi perangkat elektronik sebesar 2,7 kg. Wahana mampu mengangkut beban sebesar 4 kg selain perangkat elektronik di dalamnya. Wahana yang mengapung di permukaan air memiliki bobot yang lebih kecil dibandingkan gaya apungnya.
12
Sistem Elektronika
Rangkaian utama Arduino Mega 2560
Arduino Mega 2560 (Gambar 7) merupakan sebuah modul dengan rangkaian minimum mikrokontroler ATmega2560. Mikrokontroler ini sudah memiliki
bootloader di dalamnya, sehingga dapat diprogram ulang dengan menggunakan Arduino IDE melalui jalur komunikasi Universal Asyncronous Receiver / Transmitter (UART). Dalam rangkaian minimum ini terdapat kristal eksternal sebesar 16MHz yang merupakan nilai maksimum kristal yang dibutuhkan ATmega2560, sehingga memungkinkan proses instruksi perintah berjalan lebih cepat (Atmel 2014). Gambar 8 menunjukkan rangkaian utama Arduino Mega 2560.
Gambar 7 Modul Arduino Mega 2560
13 Konfigurasi pin Arduino dengan beberapa perangkat ditunjukan Tabel 3. Tabel 3 Konfigurasi Arduino dengan perangkat lain
Perangkat Pin Keterangan
HMC5883L SDA SDA
SCL SCL
ADXL345 SDA SDA
SCL SCL
GPS U-blox Neo 6M RX1 RX Data
KYL-1020U RX3 RX Data
Micro SD Card Module Catalex D50 MISO
D51 MOSI
D52 SCK
D53 CS
Electronic Savety Controler D7 PWM signal
Motor Servo D6 PWM signal
Receiver Remote Control D23 Input Channel 3
D25 Input Channel 1 D27 Input Channel 2 Rangkaian HMC5883L
Modul HMC5883L (Gambar 9) digunakan sebagai sensor magnetometer yang menghasilkan nilai kompas atau arah dalam bentuk derajat dengan antarmuka I2C (Two Wire). Pin yang digunakan pada mikrokontroler untuk komunikasi ini adalah pin SDA dan SCL. Sensor ini memiliki tiga sumbu dalam pengukuran nilai magnetnya, yaitu sumbu x, sumbu y, dan sumbu z.
14
Gambar 10 Rangkaian modul HMC5883L Rangkaian ADXL345
ADXL345 (Gambar 11) merupakan sensor akselerometer yang digunakan untuk menentukan nilai roll dan pitch pada wahana. ADXL345 menggunakan antarmuka I2C (Two Wire) untuk berkomunikasi dengan mikrokontroler, sehingga pin yang digunakan pada mikrokontroler adalah pin SDA dan SCL. Sensor ini menghitung percepatan gerak dari sensor terhadap tiga sumbu, yaitu sumbu x, sumbu y, dan sumbu z.
Gambar 11 Modul ADXL345
15 GPS U-blox Neo 6M
GPS digunakan untuk menentukan posisi koordinat dari wahana pada suatu lokasi. GPS u-blox Neo 6M (Gambar 13) memiliki akurasi GPS 2,5 meter, kecepatan 0,1 m/s, dan arah 0,5 derajat pada CEP 50% (U-blox 2011). Komunikasi antara mikrokontroler dan GPS menggunakan jalur Universal Asyncronous Receiver / Transmitter (UART) dengan BaudRate 9600, sehingga menggunakan pin TX dan RX pada mikrokontroler.
Gambar 13 Modul GPS u-blox Neo 6M (kanan) dan antena eksternal (kiri) Format data yang dikirimkan dari GPS ke mikrokontroler menggunakan format data NMEA 0183, yaitu format data standar untuk peralatan elektronik kelautan yang telah disepakati oleh National Marine Electronics Association
(NMEA). NMEA 0183 yang diterima terdiri dari $GPRMC, $GPGGA, $GPGSA, $GPGSV, $GPGLL, $GPVTG, dan $GPTXT. Namun yang digunakan untuk menentukan posisi hanya $GPRMC dan $GPGGA. Contoh data NMEA 0183 yang didapatkan dapat dilihat pada Gambar 14.
16
Rangkaian Penyimpanan
Modul mikro SDCard Catalex (Gambar 15) adalah modul pembaca kartu mikro SD agar dapat membaca dan menulis pada kartu mikro SD. Antarmuka yang digunakan pada modul ini adalah Serial Pheripheral Interface (SPI) sehingga pin pada mikrokontroler yang digunakan adalah MISO (D50), MOSI (D51), SCK (D52), CS(D53). Rangkaian modul mikro SDCard Catalex dapat dilihat pada Gambar 16.
Gambar 15 Modul mikro SD Catalex
Gambar 16 Rangkaian modul mikro SD Catalex Modul Transceiver KYL-1020U
Modul KYL-1020U (Gambar 17) merupakan modul radio yang bersifat
transceiver, yaitu dapat berlaku sebagai transmitter dan receiver, dengan antarmuka Universal Asyncronous Receiver / Transmiter (UART). Komunikasi antara KYL-1020U dan mikrokontroler menggunakan pin TX dan RX dengan
BaudRate 9600. Komunikasi antar KYL-1020U secara wireless menggunakan gelombang radio pada frekuensi 433 MHz.
17
Gambar 17 Modul KYL-1020U
Perangkat Lunak
Perangkat lunak merupakan sebuah instruksi tetap yang tersimpan dalam
flash memory program. Mikrokontroler tidak dapat bekerja tanpa adanya perangkat lunak yang tertanam di dalamnya (Idris 2014). Bahasa pemrograman yang digunakan dalam pembuatan perangkat lunak unmanned surface vehicle adalah bahasa C dengan mengggunakan Arduino IDE versi 1.6.3. Perangkat lunak yang dibuat memiliki empat fungsi utama yaitu: menentukan arah tujuan wahana berdasarkan waypoint, menerima data kompas, roll, pitch, posisi koordinat berdasarkan GPS, melakukan penyimpanan data, serta mengirimkan data ke groud segment. Alur perangkat lunak unmanned surface vehicle dapat dilihat pada Gambar 18.
Mikrokontroler melakukan inisialisasi sensor akselerometer (ADXL345), sensor magnetometer (HMC5883L) dan micro SD card pada saat awal dihidupkan.
Jika micro SD card rusak atau belum dimasukkan maka mikrokontroler melakukan proses inisialisasi hingga micro SD card terdeteksi. Jika micro SD card serta sensor berfungsi dengan benar maka mikrokontroler membaca file WAYPOINT.TXT yang berisi titik-titik waypoint yang akan dituju dan telah ditentukan sebelumnya, sehingga akan diketahui jumlah waypoint. Setelah mikrokontroler membaca banyaknya waypoint, kemudian servo digerakkan ke kanan dan ke kiri masing-masing selama dua detik kemudian kembali ke posisi normal untuk memastikan kapal dapat bermanuver dengan baik. Ketika semua komponen telah berfungsi dengan baik, mikrokontroler mengambil data posisi dalam bentuk koordinat dengan menggunakan modul GPS U-blox Neo 6M, arah orientasi kapal dengan sensor magnetometer dan nilai roll kapal dengan menggunakan sensor akselerometer.
Posisi yang didapatkan melalui GPS harus merupakan data yang valid agar penentuan arah tujuan kapal menjadi akurat. Ketika data GPS yang didapatkan tidak valid maka mikrokontroler terus mengambil data hingga data GPS valid tanpa menjalankan motor Brushless DC sehingga kapal tidak bergerak. Ketika data GPS yang didapatkan valid maka mikrokontroler menghidupkan motor DC agar kapal dapat melaju.
18 Mulai Inisialisasi: 1. Micro SD Card 2. ADXL345 3. HMC5883L
Ada Micro SD Card ?
Tidak
Baca file WAYPOINT.TXT
GPS Valid? Ada Tidak Inisialisasi servo Motor BLDC berputar ya
Hitung jarak kapal dengan waypoint Hitung kurs ke waypoint
Servo mengarahkan kapal ke waypoint Baca data GPS, Kompas, Roll
Jarak <= 4
Lanjut ke waypoint berikutnya
Waypoint masih ada? Ya
Tidak
Ada
Kembali ke lokasi asal Selesai
Tidak Menyimpan data posisi
Mengirim data ke ground segment
19
Tampilan Antarmuka Pengguna Unmanned Surface Vehicle (USV)
Data yang didapatkan kemudian ditransmisikan dan ditampilkan pada user interface. User interface terdiri dari Google Earth dan juga Python. Data yang ditampilkan menggunakan Python terdiri dari data roll, pitch, yaw / kompas, arah target, arah saat ini, selisih arah, jarak ke target, dan waypoint saat ini dan jumlah maksimal waypoint. Data yang ditampilkan menggunakan Google Earth adalah data posisi saat ini dari wahana dan lintasan yang akan dilalui oleh wahana. Tampilan user interface dapat dilihat pada Gambar 19.
Pemilihan Google Earth untuk menampilkan posisi wahana dikarenakan penggunaan yang cukup mudah dan tampilan yang user friendly atau mudah digunakan. Google Earth juga tersedia dengan peta tak berbayar sehingga mudah untuk mengakses lokasi yang digunakan. Lokasi wahana ditunjukkan dengan tool placemark. Posisi placemark berpindah sesuai posisi wahana sebenarnya (real time) dengan memperbaharui file *.kml yang berisi posisi koordinat placemark. Rute waypoint yang ditampilkan dengan menggunakan tool path pada Google Earth.
Tampilan roll, pitch dan yaw dalam bentuk 2 dimensi dan 3 dimensi beserta data arah target, arah saat ini, selisih arah, jarak ke target, dan waypoint saat ini dan jumlah maksimal waypoint dibuat dengan menggunakan python. Tampilan roll,
pitch, dan yaw dibuat menggunaan python dengan toolvisual python (vPython). Dalam penggunaannya, pengguna hanya perlu membuka file *.kml dengan menggunakan Google Earth kemudian menjalankan scriptpython yang telah dibuat. Agar dapat berkomunikasi antara Arduino dengan perangkat komputer, port pada
20
21
File Lintasan yang Dilalui (WAYPOINT.TXT)
Unmanned surface vehicle (USV) berjalan sesuai dengan lintasan yang telah dibuat sebelumnya. Lintasan yang dibuat terdiri dari beberapa titik waypoint, yaitu koordinat lintang dan bujur pada suatu titik lokasi. Agar dapat dibaca oleh wahana, maka ditentukan format penulisan waypoint. Format penulisan waypoint dapat dilihat pada Gambar 20.
Gambar 20 Contoh waypoint yang digunakan
Nama file yang dibaca oleh mikrokontroler sebagai file yang berisi waypoint
adalah WAYPOINT.TXT. Nama file tersebut tidak bersifat case sensitive, yaitu penulisan dapat secara kapital ataupun tidak. Pada file WAYPOINT.TXT terdapat tiga data, yaitu nomor waypoint, lintang (tanpa tanda minus) dan bujur. Penulisan nilai lintang dan bujur harus memiliki tiga digit angka di depan desimal dan sembilan digit angka di belakang desimal. Pemisah antara nomor waypoint, lintang dan bujur dengan menggunakan spasi (space). Pada bagian bawah harus terdapat *END* yang merupakan end of file (EOF), yaitu penanda bahwa sudah mencapai bagian akhir dari file.
Pembacaan nilai waypoint oleh mikrokontroler dimulai dari waypoint
bernomor satu. Waypoint bernomor nol merupakan posisi tujuan wahana ketika telah mencapai waypoint terakhir agar memudahkan pengguna untuk mengambil wahana yang telah selesai digunakan.
22
Uji Laboratorium Stabilitas
Uji stabilitas dilakukan dengan melihat nilai rolling duration. Nilai tersebut didapat dengan menghitung lama waktu yang dibutuhkan oleh kapal pada saat dimiringkan secara maksimal hingga stabil kembali.
Gambar 21 Grafik rolling duration unmanned surface vehicle (USV) Gambar 21 menunjukkan kapal membutuhkan waktu 3077 ms atau sekitar 3 detik untuk kembali pada keadaan diam setelah dimiringkan secara maksimal. Wahana mengalami 6 kali oleng. Pada oleng pertama, sudut saat dimiringkan sebesar 13,4° ke kiri dan kapal mendapat dorongan untuk kembali ke posisi semula sehingga mencapai kemiringan 24° ke kanan. Pada oleng kedua, kapal miring ke kiri sebesar 4,7° lalu ke kanan hingga 3,1°. Rata-rata waktu yang dibutuhkan kapal untuk kembali ke posisi 0° pada tiap olengnya adalah 114,3 ms dengan reduksi oleng dari oleng pertama ke oleng kedua sebesar 86,8%. Persen reduksi oleng yang besar tersebut dikarenakan kapal yang digunakan berjenis katamaran. Berdasarkan hasil penelitian Ramadhan (2012), kapal berjenis mono hull memiliki nilai persen reduksi oleng yang lebih kecil dibandingkan kapal berjenis katamaran, yaitu sebesar 30 – 35 %. Nilai reduksi oleng yang besar akan mengakibatkan kapal akan lebih cepat kembali ke posisi semula setelah mengalami oleng.
Akurasi Sensor
GPS (Global Positioning System)
Uji akurasi GPS dilakukan dengan meletakkan GPS dalam waktu 60 menit untuk merekam posisi koordinat yang didapatkan. Peletakkan GPS harus di tempat yang terbuka dan tidak ternaungi agar GPS mendapatkan data posisi yang akurat. Akurasi GPS yang digunakan dapat dilihat pada Gambar 22. Untuk menghitung nilai akurasi GPS, nilai posisi yang digunakan dalam bentuk Easting dan Northing.
Nilai posisi yang didapatkan dari GPS dalam bentuk Latitude dan Longitude
kemudian diubah kedalam bentuk Easting dan Northing.
-20 -15 -10 -5 0 5 10 15 20 25 30 0 1000 2000 3000 Roll De gre e dT (ms)
23
Gambar 22 Uji akurasi GPS U-Blox Neo 6M selama 60 menit
Gambar 22 memberikan data akurasi GPS menggunakan CEP bernilai 1,9377 m dan 2DRMS bernilai 4,7570 m. Perhitungan nilai akurasi GPS menggunakan CEP (Circular Error Probable) 50% dan 2DRMS (Twice the Distance Root Mean Square) 95% dengan persamaan (3) dan (4). CEP 50% berarti radius 50% dari jarak akurasi GPS, sedangkan 2DRMS 95% berarti radius 95% dari jarak akurasi GPS. GPS memiliki tingkat akurasi yang semakin tinggi jika nilai akurasinya semakin mendekati nol. Nilai akurasi GPS yang didapatkan pada CEP 50% lebih kecil dibandingkan dengan nilai akurasi GPS pada CEP 50% berdasarkan
datasheet, yaitu 1,9377 meter dibandingkan 2,5 meter. Hal tersebut menunjukan bahwa GPS yang digunakan masih memiliki tingkat akurasi yang tinggi.
Uji Lapang
Uji lapang dilakukan untuk melihat kemampuan wahana dalam mengikuti
waypoint yang telah dibuat dalam beberapa bentuk lintasan atau rute, seperti lintasan lurus, zigzag, parallel, dan berbentuk huruf “S” dengan bentuk wahana yang ada. Wahana dikatakan mampu mengikuti lintasan yang ada jika nilai selisih jarak wahana dengan waypoint tidak lebih besar dari nilai 2DRMS 95% GPS, yaitu sebesar 4,757 meter. Wahana yang dijalankan akan merekam data posisi wahana dalam bentuk lintang dan bujur pada interval perekaman satu detik. Selisih jarak dihitung pada tiap titik waypoint terhadap posisi wahana yang sebenarnya pada sumbu X dan/atau sumbu Y.
Wahana melaju menuju waypoint hingga jarak antara wahana dengan waypoint yang dituju telah memenuhi toleransi. Toleransi jarak yang digunakan ketika uji lapang adalah <= 4 meter yang didasari oleh nilai 2DRMS 95% GPS. Nilai toleransi arah wahana yang digunakan adalah +3 derajat, sehingga wahana akan melaju lurus jika selisih antara arah yang seharusnya dengan arah sebenarnya masih dalam rentang toleransi.
-8 -6 -4 -2 0 2 4 6 8 10 -20De -15 -10 -5 0 5 10 lt a Y Delta X Posisi CEP 2DRMS
24
Lintasan Lurus
Pada lintasan lurus terdapat 11 titik waypoint yang dimulai dari titik -6,5526 LS dan 106,7473 BT menuju -6,5532 LS dan 106,7481 BT. Jarak antar waypoint
rata-rata sebesar 11,4 meter, dengan panjang lintasan sebesar 114,7 meter. Nilai
error terhadap sumbu x terbesar terdapat pada waypoint ke-7 yaitu sebesar 2,1 meter. Nilai error terhadap sumbu y terbesar terdapat pada waypoint ke-7 yaitu sebesar 1,2 meter. Nilai tersebut masih berada dibawah nilai 2DRMS 95% GPS sehingga dapat dikatakan bahwa wahana masih tepat mengikuti lintasan lurus. Hasil uji lapang pada lintasan lurus dapat dilihat pada Gambar 23.
Gambar 23 Nilai error uji lintasan “lurus” pada sumbu x dan/atau sumbu y Lintasan Zigzag
Pada lintasan zigzag terdapat 9 titik waypoint yang dimulai dari titik -6,5527 LS dan 106,7473 BT menuju -6,5531 LS dan 106,7479 BT. Jarak antar waypoint
rata-rata sebesar 11,3 meter, dengan panjang lintasan sebesar 83,9 meter. Nilai
error terhadap sumbu x terbesar terdapat pada waypoint ke-4 yaitu sebesar 2,6 meter. Nilai error terhadap sumbu y terbesar terdapat pada waypoint ke-1 yaitu sebesar 3,7 meter. Nilai tersebut masih berada dibawah nilai 2DRMS 95% GPS sehingga dapat dikatakan wahana tepat dalam mengikuti lintasan zigzag. Hasil uji lapang pada lintasan zigzag dapat dilihat pada Gambar 24.
-6.5534 -6.5533 -6.5532 -6.5531 -6.553 -6.5529 -6.5528 -6.5527 -6.5526 -6.5525 -6.5524 Lin ta n g Bujur Waypoint USV (0.45, 0.41) (1.58, 1.24) (0.55, 0.56) (0.17, 0.14) (0.44, 0.31) (0.22, 0.68) (2.05, 1.27) (0, 0) (1.22, 0.9) (0.4, 0.4) (0.67, 0.45) A B
25
Gambar 24 Nilai error uji lintasan “zigzag” pada sumbu x dan/atau sumbu y Lintasan Parallel
Pada lintasan parallel terdapat 16 titik waypoint yang dimulai dari titik -6,5527 LS dan 106,7474 BT menuju -6,5532 LS dan 106,7477 BT. Jarak antar
waypoint rata-rata sebesar 7,8 meter, dengan panjang lintasan sebesar 141,9 meter. Nilai error terhadap sumbu x terbesar terdapat pada waypoint ke-5 yaitu sebesar 4,8 meter. Nilai error terhadap sumbu y terbesar terdapat pada waypoint ke-15 yaitu sebesar 3,9 meter. Nilai error pada sumbu y masih berada dibawah nilai 2DRMS 95% GPS, sedangkan nilai error pada sumbu x lebih besar dari nilai 2DRMS 95% GPS. Hal ini disebabkan posisi lintasan yang diagonal terhadap sumbu x dan sumbu y, sehingga jarak menjadi lebih jauh pada sumbu x dan sumbu y. Pada waypoint ke-5, jarak terdekat terhadap posisi GPS aktual sebesar 2,4 meter. Nilai tersebut masih masuk kedalam toleransi wahana dalam penghitungan jarak sehingga wahana melanjutkan perjalanan meskipun jarak pada sumbu x tersebut lebih besar dari nilai 2DRMS 95% GPS. Selain itu, kapal dengan jenis katamaran memiliki kekurangan dalam maneuver dan semua jenis kapal tidak dapat melakukan maneuver secara patah. Sehingga pada lintasan parallel gerak maneuver kapal akan lebih memutar dan menghasilkan jarak error antara titik waypoint dan posisi wahana yang lebih besar. Hasil uji lapang pada lintasan parallel dapat dilihat pada Gambar 25.
-6.5532 -6.55315 -6.5531 -6.55305 -6.553 -6.55295 -6.5529 -6.55285 -6.5528 -6.55275 -6.5527 -6.55265 Lin ta n g Bujur Waypoint USV (1.98, 3.73) (0.58, 1.7) (1.47, - ) (2.63, -) (2.42, - ) ( - , 0.99) ( - , 1.6) ( - , 1.93) ( - , 2.06) A B
26
Gambar 25 Nilai error uji lintasan “paralel” pada sumbu x dan/atau sumbu y Lintasan “S”
Pada lintasan berbentuk huruf S terdapat 16 titik waypoint yang dimulai dari titik -6,5526 LS dan 106,7474 BT menuju -6,5533 LS dan 106,7478 BT. Jarak antar
waypoint rata-rata sebesar 8,9 meter, dengan panjang lintasan sebesar 134,8 meter. Nilai error terhadap sumbu x terbesar terdapat pada waypoint ke-9 yaitu sebesar 3,8 meter. Nilai error terhadap sumbu y terbesar terdapat pada waypoint ke-7 yaitu sebesar 4,4 meter. Nilai tersebut masih berada dibawah nilai 2DRMS 95% GPS sehingga dapat dikatakan bahwa wahana masih mengikuti lintasan dengan tepat. Hasil uji lapang pada lintasan S dapat dilihat pada Gambar 26.
-6.5533 -6.5532 -6.5531 -6.553 -6.5529 -6.5528 -6.5527 -6.5526 106.7473 106.7474 106.7475 106.7476 106.7477 106.7478 106.7479 Lin ta n g Bujur Waypoint USV (2.91, 2.56) (1.19, 1.55) (3.8, 3.35) (3.73, 3.25) (4.82, - ) (0.99, 0.57) (2.37, 2.22) (1.13, 1.52) (0.29, 0.5) (2.53, 0.37) ( - , 3.07) (1.27, 0.69) (2.56, 2.28) (0.6, 2.33) (3.32, 3.98) (2.86, 1.6) A B
27
Gambar 26 Nilai error uji lintasan “S” pada sumbu x dan/atau sumbu y Pada uji lapang dapat dilihat bahwa USV merespon titik waypoint yang telah dibuat dan dapat mengikuti bentuk lintasan yang telah dibuat, yaitu lintasan lurus, lintasan zigzag, lintasan parallel, dan lintasan berbentuk huruf S. Nilai error yang ada dikarenakan adanya toleransi yang diberikan pada algoritma wahana. Hal ini menunjukkan bahwa USV bersifat autonomous yang dapat berjalan secara otomatis. Selain itu USV juga dapat dikendalikan menggunakan remote sebagai transmitter
dengan jarak hingga 200 meter. Pemilihan mode manual dan otomatis dilakukan menggunakan remote kendali. Ketika remote kendali dihidupkan, maka wahana secara otomatis menjadi manual dan dapat dikendalikan. Namun ketika remote
kendali dimatikan, maka wahana secara otomatis berjalan mengikuti waypoint. Nilai rataan error posisi wahana terhadap lintasan pada sumbu x dan sumbu y sebesar 1,5 meter. Pada lintasan lurus dan perairan yang tenang, wahana membutuhkan waktu 2 menit 30 detik untuk menempuh jarak 123,3 meter. Sehingga kecepatan kapal pada saat tersebut adalah sebesar 0,8 m/s atau sekitar 1,59 knot. Kecepatan putaran motor wahana ketika dijalankan adalah konstan, namun kecepatan wahana pada saat di lapang dapat berbeda tergantung keadaan di lapang. Kondisi lapang yang berangin juga mempengaruhi laju wahana di permukaan air. -6.5534 -6.5533 -6.5532 -6.5531 -6.553 -6.5529 -6.5528 -6.5527 -6.5526 Lin ta n g Bujur Waypoint USV (0.3, 0.21) (0.62, 0.5) (1.74, - ) (2.64, 1.92) (1.15, 1.12) (1.28, 1.21) (1.65, 4.49) (1.95, 1.55) (3.85, 1.62) (0.9, 0.79) (0.13, 0.11) ( - , 1.55) (0.39, 0.33) (0.33, - ) (0.23, - ) (0.64, 2.39) A B
28
SIMPULAN DAN SARAN
Simpulan
Rancang bangun wahana permukaan tak berawak (unmanned surface vehicle
(USV)) telah berhasil dilakukan. USV dapat dikendalikan hingga jarak 200 meter atau berjalan secara otomatis dengan mengikuti waypoint yang telah ditentukan. USV yang dibuat cukup sederhana dengan bahan dasar pembuatannya menggunakan pipa PVC dan alumunium yang mudah didapatkan dan mudah dalam perancangannya. Remote kendali digunakan untuk memilih mode berjalan dari wahana, yaitu secara manual atau secara otomatis. Waypoint yang ingin dituju dimasukkan kedalam micro SD pada wahana. Nilai error terbesar pada sumbu x yaitu 4,8 meter dan pada sumbu y 4,4 meter. Nilai akurasi GPS dengan CEP 50% sebesar 1,9 meter dan 2DRMS 95% sebesar 4,7 meter. Wahana mampu mengikuti lintasan dengan baik pada lintasan lurus, zigzag dan lintasan S dan cukup baik pada lintasan parallel dengan rataan error pada sumbu x dan sumbu y sebesar 1,5 meter. Pada lintasan parallel wahana kurang mampu melakukan maneuver pada lintasan yang berbelok patah. Wahana cukup stabil dengan waktu yang dibutuhkan kapal untuk kembali pada keadaan semula sekitar 1,7 detik. Kecepatan wahana pada saat uji lapang sebesar 0,8 m/s atau sekitar 1,6 knot.
Saran
Pengembangan lebih lanjut rancang bangun wahana permukaan tak berawak (unmanned surface vehicle (USV)) sangat diharapkan untuk mengatasi kelemahan yang terdapat pada penelitian ini. Penggunaan GPS dengan tingkat akurasi yang lebih tinggi diperlukan agar galat ketika digunakan semakin kecil. Pembuatan hull
yang lebih hidrodinamis agar laju wahana di permukaan air menjadi lebih efisien. Untuk lebih lanjutnya sebaiknya ditambahkan sensor untuk diuji pada saat pengambilan data lingkungan. Pada penelitian selanjutnya, sebaiknya ditambahkan kemampuan wahana dalam maneuver pada lintasan parallel.
DAFTAR PUSTAKA
Atmel. 2014. 8-bit Atmel Microcontroller with 16/32/64KB In-System Programmable Flash [Internet]. [diunduh 2015 Jun 6]. Tersedia pada:
http://www.atmel.com/Images/Atmel-2549-8-bit-AVR-Microcontroller-ATmega640-1280-1281-2560-2561_datasheet.pdf.
Bhatia S, Saba H. 2013. Mathematical Analysis of Mobile Latitude Software on Location Tracking. International Journal of Computer Applications (0975 – 8887). 70(8):38-42.
29 Caruso MJ. 2000. Applications of Magnetic Sensors for Low Cost Compass Systems [Internet]. [diunduh 2015 Sept 7]. Tersedia pada: https://www.stampsinclass.parallaxinc.com/sites/default/files/downloads/29133 -Compass-Module-Application-Note.pdf.
Ferreira H, Almeida C, Martins A, Almeida J, Dias N, Dias A, Silva E. 2009. Autonomous Bathymetry for Risk Assessment with ROAZ Robotic Surface Vehicle. OCEANS 2009; 2009 May 11-14; Bremen, Jerman. Bremen (DE): IEEE. hlm 1-9.
Fyson J. 1985. Design of Small Fishing Vessels. Rome (IT): FAO of the United Nation.
Hadi ES. 2009. Komparasi Hull Performance pada Konsep Design Kapal Ikan Multi Fungsi dengan Lambung Katamaran. Jurnal Kapal. 6(3):212-217.
Idris MHD. 2014. Rancang Bangun dan Uji Kinerja Water Temperature Data Loger
[skripsi]. Bogor (ID): Institut Pertanian Bogor.
Ismail SH. 2010. Perancangan Program Pemilihan Propeller Jenis Wageningen B Series Berbasis Efisiensi [skripsi]. Surabaya (ID): Institut Teknologi Sepuluh November.
Manley JE. 2008. Unmanned Surface Vehicles, 15 Years of Development.
OCEANS 2008; 2008 Sept 15-18; Quebec City, Canada. Quebec City (CA): IEEE. hlm 1-4.
Manohar S, Kim CK, Karegoudar TB. 2001. Enhanced degradation of naphthalene by immobilization of Pseudomonas sp. strain NGK1 in polyurethane foam. Applied Microbiol Biotechnol. 55:311-316.doi:10.1007/s002530000488.
Naeem W, Xu T, Sutton R, Tiano A. 2007. The design of navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring. Engineering for the Maritime Environment. 222:67-79.doi:10.1243/ 14750902JEME80
Pfost D, William C. 1998. Precision Agriculture: Global Positioning System (GPS).
Water Quality. 452:1-6.
Ramadhan AD. 2012. Keragaan Oleng Kapal Round Bottom (Skala Model) dengan Luas Free Surface Muatan Cair yang Berbeda [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Ru-jian Y, Shuo P, Han-bing S, Yong-jie P. 2010. Development and Mission of Unmanned Surface Vehicle. Journal of Marine Science Applied. 9:451-457.doi:10.1007/s11804-010-1033-2.
Taufik AS. 2013. Sistem Navigasi Waypoint pada Autonomous Mobile Robot.
Jurnal Mahasiswa TEUB. 1(1):1-6.
Tuck K. 2007. Tilt Sensing Using Linear Accelerometers [Internet]. [diunduh 2015 Sept 7]. Tersedia pada: http://picdatalogger.googlecode.com/svn-history/r9/docs/Acelerometro/Freescale_AN3461.pdf.
U-blox. 2011. NEO-6 u-blox 6 GPS Modules Data Sheet [Internet]. [diunduh 2015 Jan 30]. Tersedia pada: https://u-blox.com/images/downloads/Product _Docs/NEO-6_DataSheet_(GPS.G6-HW-09005).pdf.
30
Lampiran 1 Dokumentasi penelitian
Pembuatan sistem elektronik Pembuatan mekanik
Pembuatan perangkat lunak Pengukuran bobot wahana
31 Lampiran 2 Waypoint yang digunakan pada uji lapang
#Lintasan Lurus Waypoint Lintang (derajat) Bujur (derajat) Error X (meter) Error Y (meter) 1 -6.552628039 106.7473747 0.45 0.41 2 -6.552702749 106.7474495 1.58 1.24 3 -6.552770689 106.7475248 0.55 0.56 4 -6.552838609 106.747607 0.17 0.14 5 -6.552913303 106.747696 0.44 0.31 6 -6.552981325 106.7477777 0.22 0.68 7 -6.55303578 106.7478527 2.05 1.27 8 -6.553097089 106.7479346 0 0 9 -6.553165244 106.7480164 1.22 0.9 10 -6.553226616 106.7480847 0.4 0.4 11 -6.553295332 106.7481663 0.67 0.45 #Lintasan Zigzag Waypoint Lintang (derajat) Bujur (derajat) Error X (meter) Error Y (meter) 1 -6.552716346 106.7473869 1.98 3.73 2 -6.552777581 106.7473931 0.58 1.7 3 -6.552886602 106.7474056 1.47 - 4 -6.55298216 106.7474182 2.63 - 5 -6.553050451 106.7474452 2.42 - 6 -6.553070532 106.7475767 - 0.99 7 -6.553104432 106.7477211 - 1.6 8 -6.553117889 106.7478173 - 1.93 9 -6.553145025 106.7479134 - 2.06 #Lintasan Parallel Waypoint Lintang (derajat) Bujur (derajat) Error X (meter) Error Y (meter) 1 -6.552736719 106.7474906 2.91 2.56 2 -6.552804658 106.747559 1.19 1.55 3 -6.552865955 106.7475237 3.8 3.35 4 -6.552927444 106.7474536 3.73 3.25 5 -6.552961698 106.7474046 4.82 -
32 6 -6.553023028 106.7474664 0.99 0.57 7 -6.553084358 106.7475281 2.37 2.22 8 -6.553139049 106.7475757 1.13 1.52 9 -6.553090932 106.7476385 0.29 0.5 10 -6.553049763 106.7476942 2.53 0.37 11 -6.553015506 106.7477429 - 3.07 12 -6.553063247 106.7477836 1.27 0.69 13 -6.553104203 106.7478175 2.56 2.28 14 -6.553152018 106.7478583 0.6 2.33 15 -6.553186398 106.7478165 3.32 3.98 16 -6.553227673 106.7477815 2.86 1.6 #Lintasan S Waypoint Lintang (derajat) Bujur (derajat) Error X (meter) Error Y (meter) 1 -6.552675588 106.7474775 0.3 0.21 2 -6.552709541 106.7475255 0.62 0.5 3 -6.552770684 106.7475317 1.74 - 4 -6.552845526 106.7475239 2.64 1.92 5 -6.552866053 106.7474613 1.15 1.12 6 -6.552934362 106.7474119 1.28 1.21 7 -6.553009586 106.7473901 1.65 4.49 8 -6.553077797 106.7474518 1.95 1.55 9 -6.553125456 106.7475275 3.85 1.62 10 -6.553118345 106.7476312 0.9 0.79 11 -6.553063424 106.7477009 0.13 0.11 12 -6.553049565 106.7477906 - 1.55 13 -6.553083559 106.7478728 0.39 0.33 14 -6.5531587 106.7479201 0.33 - 15 -6.553234107 106.7479193 0.23 - 16 -6.553302892 106.747891 0.64 2.39
33
RIWAYAT HIDUP
Penulis dilahirkan di Jakarta pada 29 September 1993 dari ayah bernama (alm) R. Zaenal Arifin dan ibu R. Lolo Irwana. Penulis adalah putra kedua dari dua bersaudara. Penulis menyelesaikan pendidikan Sekolah Menengah Atas (SMA) Negeri 1 Kota Tangerang Selatan pada tahun 2011, dan pada tahun yang sama penulis lulus seleksi masuk IPB melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) Tulis dan diterima di Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Selama mengikuti perkuliahan, penulis pernah menjadi asisten Oseanografi Umum pada periode 2013/2014, asisten Dasar-dasar Instrumentasi Kelautan periode 2013/2014 dan 2014/2015, asisten Instrumentasi Kelautan periode 2014/2015. Penulis juga aktif dalam organisasi Manajerial IPB Political School jilid 4 periode 2012/2013 sebagai Kepala Divisi Program dan staf Kementrian Kebijakan Nasional (Jaknas) BEM KM IPB 2013, Kepala Divisi Keilmuwan dan Keprofesian pada Himpunan Mahasiswa Ilmu dan Teknologi Kelautan (HIMITEKA) 2014, anggota club Marine Instrumentation and Telemetry (MIT) periode 2014/2015 dan periode 2015. Selain itu penulis pernah menjadi peserta Kontes Kapal Cepat Tak Berawak Nasional (KKCTBN) 2014.