BAB I PENDAHULUAN 1.1. Latar Belakang
Pemetaan topografi dilakukan untuk menentukan posisi planimetris (x,y) dan posisi vertikal (z) dari objek-objek dipermukaan bumi yang meliputi unsur-unsur alamiah seperti : sungai, gunung, danau, padang rumput, rawa dan sebagainya serta unsur-unsur buatan manusia seperti rumah, sawah, jembatan, jalan, jalur pipa, rell kereta api dan sebagainya. Ilmu Geodesi pada mulanya adalah cabang terapan dari ilmu matematis, ilmu bumi bersama ilmu geologi, geofisika dan lain sebagainya. Yang perkembanganya dipengaruhi oleh perkembangan teknologi dan metodologi dan aplikasi instrument ukur Geodesi untuk keperluan pengukuran dan rekayasa yang dikenal dengan engineering surveying yang di Indonesia dikenal dengan Teknik Geodesi.
Ilmu Geodesi mempunyai dua maksud yaitu:
1. Maksud Ilmiah : menentukan bentuk dari permukaan bumi
2. Maksud Praktis : membuat bayangan yang dinamakan peta dari sebagian besar atau sebagian kecil dari permukaan bumi.
Dalam laporan praktikum ini akan dibicarakan maksud kedua yang praktis, yaitu guna pembuatan peta topografi, maksud ini dicapai dengan melakukan pengukuran-pengukuran diatas permukaan bumi yang mempunyai bentuk tidak beraturan, karena adanya gunung-gunung yang tinggi dan lembah-lembah yang curam. Pengukuran-pengukuran yang dilakukan dibagi dalam pengukuran yang mendatar untuk mendapatkan hubungan mendatar titik-titik yang diukur diatas permukaan bumi dan pengukuran tegak guna mendapatkan hubungan tegak antara titik-titik yang diukur. Untuk memindahkan keadaan dari permukaan bumi yang tidak beraturan dan yang melengkung kebidang peta yang datar, diperlukan bidang perantara yang dipilih sedemikian rupa, hingga pemindahan keadaan itu dapat dilakukan dengan semudah-mudahnya.
1.2. Maksud dan Tujuan
Pengukuran dalam praktikum mempunyai maksud dan tujuan yang akan dijelaskan pada sub bab berikut ini.
1.2.1. Maksud Praktikum
Maksud dilakukannya praktikum adalah sebagai berikut ini :
1. Mahasiswa dapat melakukan praktikum sesuai dengan yang diajarkan pada bangku perkuliahan.
2. Mahasiswa dapat memperoleh gambaran yang lebih luas mengenai bidang keilmuan geodesi, khususnya ilmu ukur tanah yang semakin maju perkembangannya.
3. Mahasiswa dapat mengatasi masalah yang terjadi pada waktu pengukuran.
4. Mahasiswa dapat mengenal azimuth matahari. 5. Mahasiswa dapat mengenal poligon tertutup.
6. Mahasiswa dapat mengenal peta topografi dengan menggunakan garis kontur.
1.2.2. Tujuan Praktikum
Secara garis besar, praktikum ini bertujuan untuk :
1. Menerapkan teori yang didapat selama dibangku kuliah dalam prakteknya dilapangan.
2. Meningkatkan keterampilan mahasiswa dalam pembuatan peta topografi.
3. Meningkatkan pemahaman mahasiswa dalam mata kuliah Ilmu Ukur Tanah.
4. Dapat melakukan pengamatan dan perhitungan azimuth matahari. 5. Dapat melakukan pengukuran dan perhitungan poligon tertutup.
1.3. Volume Pekerjaan
4. Pengukuran beda tinggi (waterpassing) 5. Pengukuran detail
6. Pengamatan azimuth matahari
7. Penggambaran peta topografi dan garis kontur
1.4. Metode Penulisan
Metode penulisan yang digunakan dalam punyusunan laporan praktikum ini adalah :
a. Metode Literatur, didasari pada teori-teori yang diberikan selama perkuliahan dan dari buku-buku lain yang berkaitan dengan Ilmu Ukur Tanah.
b. Metode Lapangan, berdasarkan pada pelaksanaan praktikum yang dilaksanakan pada bulan Desember 2009, Jalan Kedung Ombo Malang.
BAB II DASAR TEORI 2.1. Peta Topografi
Sebelum mengetahui apa itu Peta Topografi, perlu diketahui terlebih dahulu pengertian tentang kata Topografi. Topografi berasal dari bahasa Yunani dan terdiri dari dua kata: topos = lapangan dan grafos = penjelasan tertulis. Jadi topografi berarti penjelasan tertulis tentang lapangan. Peta topografi adalah peta yang menyajikan unsur-unsur alam asli dan unsur-unsur buatan manusia diatas permukaan bumi. Unsur-unsur alam tersebut diusahakan diperlihatkan pada posisi yang sebenarnya. Pengukuran melalui titik kontrol menguraikan cara-cara penempatan titik kontrol yang dibutuhkan untuk pengukuran pemetaan topografi. Pemetaan topografi dibuat berdasarkan koordinat yang telah ditentukan pada pengukuran titik kontrol.
Pemetaan topografi merupakan suatu pekerjaan yang memperlihatkan bentuk planimetris permukaan bumi, bentuk diukur dan hasilnya digambarkan diatas kertas dengan simbol-simbol peta pada skala tertentu yang hasilnya berupa peta topografi.
Peta topografi mempunyai ciri khas yang dibuat dengan teliti (secara geometris dan georeferensi) dan penomorannya berseri, standart. Peta topografi mempunyai peta dasar (base map) yang berarti kerangka dasar (geometris / georeferensi) bagi pembuatan peta - peta lain.
2.2. Orientasi Lapangan
Sebelum melaksanakan kegiatan pengukuran, berbagai persiapan diperlukan agar pengukuran dapat berjalan lancar. Beberapa tahapan yang harus disiapkan tersebut antara lain meliputi :
Reconnaissance, yaitu penentuan lokasi secara garis besar ditentukan secara hati-hati pada peta-peta skala kecil dan dari foto udara serta penjelajahan lapangan.
ditentukan metode pengukuran yang paling efisien. Pada tahapan ini biasanya juga dihitung kebutuhan logistik, masa kerja dan target yang harus dicapai setiap hari kerja.
Dengan adanya persiapan yang matang dan juga kesiapan fisik dan mental dari surveyor, maka diharapkan agar tugas pengukuran dapat dilaksanakan secara baik, teratur, berkeseinambungan dan selesai tepat waktu.
2.3. Kerangka Kontrol Peta
Penentuan kerangka kontrol peta adalah salah satu tahapan yang harus dilaksanakan dalam proses pembuatan peta topografi. Adapun kerangka kontrol peta terbagi atas dua macam yaitu : kerangka kontrol horizontal dan kerangka kontrol vertikal.
2.3.1. Kerangka Kontrol Horizontal
Kerangka kontrol horizontal (KKH) sangat penting peranannya dalam pembuatan peta topografi. Pengukuran kerangka kontrol horizontal biasanya dilakukan dengan menggunakan :
a. Metode Triangulasi (rangkaian segitiga untuk KKH dengan diketahui sudutnya )
b. Metode Trilaterasi (rangkaian segitiga untuk KKH dengan diketahui jaraknya)
c. Metode Poligon (rangkaian titik-titik yang membentuk segi banyak) Dalam laporan praktikum ini akan dijelaskan mengenai pengukuran kerangka kontrol horizontal dengan menggunakan metode polygon dan dengan menggunakan metode ini, akan didapat tiga data yaitu : sudut, jarak, dan azimuth.
a. Pengukuran Sudut
Sudut adalah perbedaan antara dua buah arah.
Metode pengukuran sudut dapat menjadi 2(dua) yaitu : - Sudut tunggal
Pada pengukuran sudut tunggal hanya didapatkan satu data ukuran sudut horizontal
Sudut tunggal
- Sudut ganda
Sudut ganda disebut juga dengan pernyataan seri. Sudut seri didapatkan dua data ukuran sudut, yaitu data ukuran sudut pada kedudukan biasa dan data ukuran sudut pada kedudukan luar biasa.
Sudut ganda
Adapun cara pengukuran sudutnya :
Pada titik 1 dimana alat theodolit didirikan, teropong diarahkan ke titik 4 sebagai backside dan set piringan horizontal menjadi 00°00′00″. Setelah itu arahkan kembali teropong ke titik 2, bacalah bacaan piringan horisontalnya. Untuk mendapatkan sudutnya yaitu dengan mengurangkan bacaan piringan horisontal pada titik 2 ke titik 4. Untuk mengontrol sudut tersebut perlu dilakukan pembacaan skala piringan horisontal luar biasa pada titik-titik tersebut sehingga didapatkan 4 sudut yaitu 2 sudut biasa dan 2 sudut luar biasa (pengukuran 1 seri rangkap). Cara ini disebut juga cara reitrasi .
A 2 3 1 A 2 3 1
Pengukuran jarak langsung Gambar 2.3.1.i b. Pengukuran jarak
Pengukuran jarak untuk kerangka kontrol peta, dapat dilakukan dengan cara langsung menggunakan alat sederhana yaitu roll meter atau dengan alat sipat datar yaitu jarak optis, sedangkan untuk mendapatkan data jarak yang lebih teliti dibandingkan dengan dua cara yang ada, data jarak didapat juga dengan alat pengukur jarak elektonis EDM ( elektro distance measurement ).
Terdapat dua macam pengukuran jarak yaitu : 1. Pengukuran jarak langsung
Dalam pengukuran kerangka kontrol horisontal yang digunakan adalah jarak langsung, dalam pengukuran jarak langsung perlu dilakukan pelurusan apabila roll meter yang digunakan tidak menjangkau dua buah titik yang sedang diukur.
d 2 d 3 d 1 2’ 1’ 2 1 Keterangan :
1 ; 2 = titik kontrol yang akan diukur 1’ ; 2’ = titik bantuan untuk pelurusan d = jarak
d12 = d
total = d1+d2+d3
2. Pengukuran jarak optis
Pengukuran jarak optis adalah pengukuran jarak secara tidak langsung karena dibantu dengan alat sipat datar atau theodolite dan rambu ukur. Dimana pada teropong alat terdapat tiga benang silang, benang atas (ba), benang tengah (bt), benang bawah (bb) yang merupakan data untuk mendapatkan jarak.
D = (ba - bb) x 100 ; untuk sipat datar dan dapat juga digunakan pada penghitungan Dm pada alat theodolit.
Dd = (ba - bb) x 100 x sin2 Z ; untuk theodolite sistem zenith. Dd = (ba - bb) x 100 x sin2 H ; untuk theodolite sistem helling.
ti A Pengukuran jarak optis Gambar 2.3.1.ii H Z Dm m Ba Bt Bb Dd ∆h AB B Keterangan gambar: A,B : titik target Dm : jarak miring
Ti : tinggi alat/tinggi instrument Z : sudut zenith
H : sudut helling Dd : jarak datar
∆h AB : beda tinggi antara titik A & titik B Ba,Bt,Bt : bacaan skala rambu ukur
Pengukuran posisi vertikal (ketinggian) dapat diperoleh dengan metode barometris, tachimetri, dan metode levelling. Pada laporan ini akan dijelaskan mengenai penentuan Kerangka Kontrol Vertikal (KKV) dengan menggunakan metode levelling (waterpass pergi pulang).
Waterpass (level / sipat datar) adalah suatu alat ukur tanah yang dipergunakan untuk mengukur beda tinggi antara titik-titik yang berdekatan yang ditentukan dengan garis-garis visir (sumbu teropong) horisontal yang ditujukan ke rambu-rambu ukur yang vertikal. Sedangkan pengukuran yang menggunakan alat ini disebut waterpassing atau levelling yang akan ditentukan ketinggiannya berdasarkan suatu sistem referensi atau datum tertentu. Pekerjaan ini dilakukan dalam rangka penentuan beda tinggi suatu titik bidang acuan. Sistem referensi yang dipergunakan adalah tinggi permukaan air laut rata-rata (mean sea level) atau sistem referensi lain yang dipilih.
Pada pengukuran beda tinggi dengan waterpass didasarkan atas kedudukan garis bidik teropong yang dibuat horisontal dengan menggunakan gelembung nivo.
Dimana: Ba = pembacaan skala rambu untuk benang atas Bt = pembacaan skala rambu untuk benang tengah Bb = pembacaan skala rambu untuk benang bawah
BtA = pembacaan skala rambu untuk benang tengah dititik A BtB = pembacaan skala rambu untuk benang tengah dititik B ∆hAB = beda tinggi titik A dan B
Waterpassing dengan sipat datar Gambar 2.3.2 ∆h AB = BtA - BtB A B Ba Bt Bb Ba Bt Bb
Persamaan di atas merupakan persamaan dasar untuk penentuan beda tinggi dengan cara sipat datar. Hasil pengukuran beda tinggi digunakan untuk menentukan tinggi titik terhadap titik tetap atau bidang acuan yang telah dipilih. Tinggi titik (elevasi) hasil pengukuran waterpass terhadap titik acuan dihitung dengan rumus :
Hb = Ha + ∆hAB Dimana :
Hb : tinggi titik yang akan ditentukan Ha : tinggi titik acuan
∆hAB : beda tinggi antara A dan B
Ada berbagai macam cara penentuan tinggi titik dengan menggunakan waterpassing atau sipat datar, salah satunya yaitu :
Waterpassing memanjang / waterpassing berantai.
Waterpassing memanjang mempunyai tujuan untuk menentukan tinggi titik secara teliti. Waterpassing memanjang ini diperlukan dalam pengukuran kerangka
kontrol vertikal, misalnya penentuan tinggi titik poligon.
B A 1 2 Btb A Bt m1 Bt b1 Bt m2 Bt b2 Bt mB Waterpasing Memanjang Gambar 2.3.2.b
Ket : Bt b : pembacaan skala rambu ukur
Untuk benang tengah belakang
Btm : pembacaan skala rambu ukur
Untuk benang tengah muka
Pada pengukuran waterpasing memanjang, pengukuran dibagi menjadi beberapa slag. Beda tinggi antara A dan B merupakan jumlah beda tinggi dari semua slag. Beda tinggi A dan B dapat dihitung sebagai berikut :
∆hA1 = Bt b A – Bt bm1
∆h12 = Bt b 1 – Bt bm2
∆h23 = Bt b2 – Bt m3
∆hnn = Btbn – Btmn
∆hAB = Σ∆hnn = ΣBtbn - ΣBtmn Keterangan rumus diatas :
∆h : beda tinggi
Bt b : pembacaam skala rambu ukur untuk benang tengah belakang
Bt m : pembacaam skala rambu ukur untuk benang tengah muka
Σ : jumlah
D : nilai jarak pengukuran dalam satuan kilometer
Syarat-Syarat Waterpass adalah:
1. Garis bidik sejajar dengan garis arah nivo. 2. Garis arah nivo tegak lurus pada sumbu satu. 3. Garis mendatar diafragma tegak lurus sumbu satu.
∆hA B C D D B A bt A bt A
Rambu ukur Rambu ukur
∆hAB=btA -btb Keterangan : ∆hAB= Beda tinggi A,B = Titik D = Jarak datar C = Tempat wp
Waterpass berada diantara dua titik
2.4. Azimut Matahari
Azimuth adalah suatu sudut yang dibentuk meridian yang melalui pengamat dan garis hubung pengamat sasaran, diukur searah jarum jam positif dari arah utara meridian.
Macam-macam azimuth:
Azimuth magnetis adalah azimuth yang diperoleh dengan bantuan kompas atau bosulle.
Azimuth astronomis adalah azimuth yang diperoleh dengan melakukan pengamatan benda-benda langit.
Ada dua cara yang sering digunakan untuk menentukan azimuth, yaitu : a. Penentuan azimuth magnetis dilakukan dengan menggunakan kompas. b. Penentuan azimuth astronomis dilakukan dengan alat yang dinamakan
geotheodolite. Untuk menentukan azimuth astronomis dengan pengamatan matahari dapat dilakukan dengan metode tinggi matahari dan metode sudut waktu.
Di bawah ini akan diuraikan penentuan azimuth garis dengan pengamatan matahari metode tinggi matahari, dengan cara menadah bayangan matahari menggunakan kuadran sehingga didapatkan bayangan matahari yang jelas.
Dalam penentuan azimuth astronomis ada 3 metode : 1. Metode Sudut Waktu
Pada metode ini, bayangan matahari harus diamati sepasang (pagi dan sore hari) dengan anggapan bahwa deklinasi matahari pagi dan sore adalah sama. Kesulitan dalam metode ini adalah tingkat kegagalanya lebih besar.
2. Metode Tinggi Matahari
Pada metode ini dilakukan pengukuran tinggi matahari yang biasa dilakukan dengan cara :
a. Dengan filter gelap
Pada pengamatan ini filter dipasang di okuler teropong, sehingga pengamat dapat langsung membidik kearah matahari.
Pada pengamatan ini prisma roelofs digunakan apabila teropong tidak memiliki lingkaran dan titik filter. Keistimewaan lain dari alat ini adalah pengamatan dapat menempatkan benang silang pada tepi-tepi matahari dengan mudah.
3. Metode Azimuth Magnetis
Pada metode ini tabular kompas dapat dilekatkan dengan mudah pada theodolite. Dengan terlebih dahulu teropong diarahkan ke salah satu titik yang lain. Sebagai titik ikatnya (misalnya poligon), dalam hal ini dimaksudkan untuk pengesetan nol derajat pada skala piringan horizontalnya, lalu setelah itu teropong diputar kembali sedemikian rupa hingga menunjuk arah utara magnetis.
Dalam laporan ini penentuan azimuth dilakukan dengan cara azimuth astronomis, yaitu dengan metode pengamatan tinggi matahari.
1 2 U Mataha ri α12 s. hor α mth Gambar 2.4: pengamatan matahari Ket : U : utara : azimuth hor : horisontal mth : matahari 1, 2 : no. titik kontrol
Penentuan azimuth dengan pengamatan tinggi matahari sering kali ditemukan kesalahan-kesalahan, yaitu :
a. Kesalahan paralaks, yaitu kesalahan yang disebabkan karena pengamatan dilakukan dari permukaan bumi, sedangkan hitungan dilakukan dari pusat bumi.
Besarnya koreksi karena kesalahan paralaks, yaitu
P = 8,8 x Cos hu………..(1-24) Dimana : P : koreksi paralaks
hu : tinggi matahari
b. Refraksi astmosfer, yaitu kesalahan karena terjadinya pembelokan sinar yang melewati lapisan atmosfer dengan kerapatan yang berbeda.
Tempat pengamatan hu Matahari Lapisan 4 lapisan 3 Lapisan 2 Lapisan1 Refraksi atmosfer Gambar 2.4.b Gambar 2.4.a Kesalahan paralaks Matahari Hu h H V Pusat bumi
Besarnya koreksi akibat refraksi atmosfer :
r = rm x Cp x Ct ……….……..(1-24) Cp = p / 760
Ct = 283 / (273 + t)
Dimana : r : sudut refraksi atmosfer
rm : koreksi normal pada 100 C, 760 mm Hg dan kelembaban 60 %
p : tekanan udara ( mm Hg ) t : suhu udara (0 C)
c. Jika pembidikan matahari tidak dilakukan pada titik pusatnya maka perlu diberikan diametral :
Koreksi diameter diberikan pada tinggi matahari (h) dan sudut horizontal (s). Besarnya diametral : dh = ½ d dan ds = ½ d
Dimana : dh = koreksi diametral untuk tinggi matahari ukuran ds = koreksi diametral untuk sudut horizontal
Setelah diberikan koreksi adanya kesalahan paralaks, refraksi atmosfer dan diametral, maka tinggi matahari terkoreksi adalah :
h = hu + p + r + ½ d ………..………..……..(1-26) dimana : h = tinggi matahari terkoreksi
hu = tinggi matahari ukuran p = koreksi paralaks
r : koreksi refraksi atsmosfer d : koreksi diametral
d. Koreksi untuk sudut horizontal : Sin ½ d / Sin ½ d = Sin 900 / Sin Z
Koreksi ½ d Gambar 2.4.c
½ d / ½ d = 1 / Sin Z, dan Z = 900 - h
½ d = ½ d / Cos h ………...…….(1-27) dimana : d = diameter, h = tinggi pusat matahari, Z = zenith
e. Cara mencari deklinasi (δ ) Swp = wp – 07 00 00 (pagi hari)
∆δ = δ x Swp
δ (pada jam 6.28) = δ + ∆δ
dimana : Swp = selisih waktu pengamatan
∆δ = perbedaan deklinasi wp = waktu pengamatan
δ = deklinasi pada jam 07.00
2.5. Pengukuran Poligon
Poligon merupakan rangkaian titik-titik yang membentuk segi banyak. Rangkaian titik tersebut dapat diguakan sebagai kerangka peta. Koordinat titik tersebut dapat dihitung dengan data masukan yang merupakan hasil dari pengukuran sudut dan jarak. Posisi titik-titik di lapangan dapat ditentukan dengan mengukur jarak dan sudut ke arah titik kontrol. Posisi titik-titik kontrol haruslah mempunyai ketelitian yang tinggi dan distribusinya dapat menjangkau semua titik.
Berdasarkan bentuk geometrisnya, poligon dapat dibedakan atas poligon terbuka dan poligon tertutup.
2.5.1. Poligon Terbuka
Poligon terbuka merupakan poligon dengan titik awal dan titik akhir tidak berimpit atau tidak pada titik yang sama. Poligon terbuka terbagi atas : a. Poligon Terbuka Terikat Sempurna
Merupakan poligon terbuka dengan titik awal dan titik akhir berupa titik yang tetap.
Dimana : A, B, S, T : titik tetap
1, 2, 3,….n : titik yang akan ditentukan koordinatnya DA1,…,DnB : jarak sisi-sisi poligon
S1, S2,…,Sn : sudut
αA1, αBT : azimuth awal dan azimuth akhir
Persyaratan yang harus dipenuhi untuk poligon terbuka terikat sempurna :
1. ΣS + F(S) = (αakhir - αawal) + (n-1) x 1800...(1-1) 2. Σd Sin α + F(X) = X akhir – X awal ………(1-2) 3. Σd cos α + F(Y) = Y akhir - Yawal ………(1-3) ket : ΣS : jumlah sudut
Σd : jumlah jarak
α : azimuth
F(S) : kesalahan sudut
F(X) : kesalahan koordinat X F(Y) : kesalahan koordinat Y b. Poligon Terbuka Terikat Sepihak
Merupakan poligon terbuka yang titik awal atau titik akhirnya berada pada titik yang tetap.
Poligon Terbuka Terikat Sempurna Gambar 2.5.1.a U U 1 D 34 D23 T αBT S 1 S n S 3 S 2 S 4 D nB D 12 n 3 2 B A
Dimana : A, n : titik tetap
1,2,…,n : titik yang akan ditentukan kordinatnya S1,S2,…,S n : sudut
α.A 1 : azimuth awal D A1, D 12,… : jarak antar titik
Pada poligon jenis ini hanya dapat dilakukan koreksi sudut saja dengan persyaratan geometris, sebagai berikut :
ΣS + F(S) = (αakhir – α awal) + n x 1800………..(1-4) ket : α akhir : azimuth akhir
α awal : azimuth awal
ΣS : jumlah sudut F(S) : kesalahan sudut c. Poligon Terbuka Sempurna
Merupakan poligon terbuka tanpa titik tetap. Pada poligon ini juga hanya dapat dilakukan koreksi sudut dengan menggunakan persamaan (1-4) dan tanpa ada pengikatan titik.
D
3n
D
23
Poligon Terbuka Terikat Sepihak Gambar 2.5.1.b α A1 S n-1 S 3 S 2 S 1 D n-1.n D 12 D A1 n-1 3 2 1 n A n D 3n D 34 α 12 S n-1 S 4 S3 S 2 D n-1.n D 23 D n-1 4 2
Ket : D12,D23,.. : jarak antar titik S2, S3,… : sudut
α12 : azimuth awal d. Poligon Terbuka Terikat Dua Azimuth
Pada prinsipnya poligon terbuka dua azimuth sama dengan poligon terbuka terikat sepihak hanya saja pada titik awal dan titik akhir diadakan pengamatan azimuth sehingga koreksi sudutnya sebagai berikut :
ΣS = [(αakhir - αawal) + n] x 1800 ket : ΣS : jumlah sudut
α akhir : azimuth akhir
α awal : azimuth awal
Ket : A (XA;YA) : koordinat awal 1,2,... : titik –titik poligon S1,S2 : sudut
αA1 : azimuth awal e. Poligon Terbuka Terikat Dua Koordinat
Poligon terbuka terikat dua koordinat merupakan poligon yang titik awal dan titik akhirnya berada pada titik tetap. Pada poligon ini hanya terdapat koreksi jarak sebagai berikut :
Σd sin α = Xakhir - Xawal
Σd sin α = Yakhir - Yawal
αn.n-1
Poligon Terbuka Terikat Sempurna Gambar 2.5.1.d α A1 S n-1 S 3 S2 S 1 3 n-1 2 1 A (XA;YA)
ket : Σd sin α : jumlah ∆ X / jumlah ∆ Y X / Y akhir : koordinat X / Y akhir X / Y awal : koordinat X / Y awal
Ket : A(XA;YA) : koordinat awal
DA1,D12,… : jarak pengukuran antar titik B(XB;YB) : koordinat akhir
S1,S2,… : sudut
2.5.2. Poligon Tertutup
Merupakan poligon dengan titik awal dan titik akhir berada pada titik yang sama.
Ket : 1,2,3,… : titik kontrol poligon
d ,d …. : jarak pengukuran sisi poligon
A (XA;YA) D 3n D 23
Poligon Terbuka Terikat Dua Koordinat Gambar 2.5.1.e S n S 3 S2 S 1 D nB D 12 D A1 n 3 2 1 B (XB;YB) α Poligon terutup Gambar 2.5.2 Sn n n S5 5 S4 4 S 3 S 2 S 1 D n5 D 45 D 34 D 23 d 12 4 n 6 3 2 1
1. ΣS + F(S) = (n-2) x 1800………(1-5) 2. Σd sin A+ F(X) = 0…….…..………..(1-6) 3. Σd cos A + F(Y) = 0…………...………..(1-7)
ket : ΣS : jumlah sudut
d sin α : jumlah X dalam meter d cos α : jumlah Y dalam meter F(S) : kesalahan sudut F(X) : kesalahan koordinat X F(Y) : kesalahan koordinat Y
Beberapa hal yang harus diperhatikan dalam penyelesaian poligon : 1. Jarak, sudut, azimuth rata-rata dihitung dari data ukuran :
∑
= − = n i n Xi x 1 ) 8 1 ( ... ... ... ...dimana : X : data ukuran rata-rata Xi : data ukuran ke-I n : jumlah pengukuran 2. Besar sudut tiap titik hasil setelah koreksi
S’ = S + F [F(S) / n]………(1-9) Dimana : S’ : sudut terkoreksi
S : sudut ukuran
3. Azimuth semua sisi poligon dihitung berdasarkan azimuth awal dan sudut semua titik hasil koreksi (S’) :
a. Jika urutan hitungan azimuth sisi poligon searah dengan jarum jam, rumus yang digunakan :
An.n+1 = (An-1.n + 1800) - Sd’………….(1-10) An.n+1 = (An-1.n + S1’) – 1800…………..(1-11)
b. Jika urutan hitungan azimuth sisi poligon berlawanan dengan arah jarum jam, rumus yang digunakan :
An.n+1 = (An-1.n + Sd’) – 1800….……….(1-12) An.n+1 = (An-1.n + 1800) – S1’….………..(1-13) Dimana : n : nomor titik
An-1.n : azimuth sisi n-1 ke n Sd’ : sudut dalam terkoreksi S1’ : sudut luar terkoreksi
4. Koordinat sementara semua titik poligon, rumus yang digunakan : Xn = Xn-1 + d Sin An-1.n………….(1-14)
Yn = Yn-1 + d Cos An-1.n…………(1-15) Dimana: Xn, Yn : koordinat titik n
X n-1,Yn-1 : koordinat titik n-1
5. Koordinat terkoreksi dari semua titik poligon dihitung dengan rumus : Xn = Xn-1 + dn Sin An-1.n + (d n / Σd) x F(X)………..(1-16)
Yn = Yn-1 + dn Cos An-1.n + (d n / Σd) x F(Y)……….(1-17) Dimana : n : nomor titik
Xn, Yn : koordinat terkoreksi titik n X n-1.n, Y n-1.n : koordinat titik n-1
d n : jarak sisi titik n-1 ken A n-1 : azimuth sisi n-1 ken 6. Ketelitian poligon dinyatakan dengan :
a. F(L) = [ F(X)2 + F(Y)2]1/2……….(1-18) K = F(L) / Σd
Dimana: F(L) : kesalahan jarak F(X) : kesalahan linier absis F(Y) : kesalahan linier ordinat
Σd : jumlah jarak
K : ketelitian linier poligon b. Kesalahan azimuth.
Eb = Arc Tan (∑∆X / ∑∆Y )
2.6. Pengukuran Detail
Yang dimaksud dengan detail atau titik detail adalah semua benda-benda di lapangan yang merupakan kelengkapan daripada sebagian permukaan bumi. Jadi, disini tidak hanya dimaksudkan pada benda-benda buatan
dengan segala perlengkapan termasuk tujuan dari pengukuran detail, yang akhirnya berwujud suatu peta. Berhubung dengan bermacam-macam tujuan dalam pemakaian peta, maka pengukuran detailpun menjadi selektif, artinya hanya detail-detail tertentu yang diukur guna keperluan suatu macam peta.
Tahap-tahap pengukuran detail : 1. Pengukuran posisi vertikal
Pada pengukuran posisi vertikal dilakukan dengan menggunakan alat ukur theodolite sehingga memungkinkan untuk menentukan posisi vertikal dan horizontal dari titik detail secara bersamaan (metode tachimetri). Rumus : Dm = ( Ba – Bb ) x 100 Dd = Dm . sin2 Z Dd = Dm . cos2 h ∆h = (Ti – Bt) + Dd * Cotan Z H1 = HA + ∆hA1
Dimana : Dm : jarak miring
Ba : pembacaan skala rambu ukur untuk benang atas Bb : pembacaan skala rambu ukur untuk benang bawah Z : sudut zenith ∆h : beda tinggi
h : heling Dd : jarak datar Gambar 2.6.1: Pengukuran Posisi Vertikal ti αh αZ Dm m Ba Bt Bb Dd ∆h AB B
H : elevasi
2. Pengukuran posisi horisontal
Pada pengukuran posisi horisontal dapat dilakukan dengan beberapa metode yaitu metode polar dan radial. Pengukuran metode polar menggunakan grid – grid yang digunakan untuk membantu pengukuran detail. Titik-titik detail pada grid diukur dari titik poligon tempat berdiri alat.
Pengukuran posisi horisontal dengan metode radial tidak menggunakan bantuan grid-grid, titik-titik detail langsung diukur dari titik poligon tempat berdiri alat ke titik detail yang akan dipetakan.
Rumus : β = dt- backsight α = (αA - β ) ± 1800 X 1 = Xa + d sin α Y 1 = Ya + d cos α ket : β = sudut X1,Y1 = koordinat α A = α Awal dt = detail
α = azimuth P 1, P 2 = tempat berdiri alat Gambar 2.5.2: Pengukuran Detail Metode Polar
P2 P1
Dalam penggambaran peta biasanya dilaksanakan beberapa tahapan,yaitu : a. Penyiapan grid peta
Penyiapan nilai absis (x), dan ordinat (y) dari grid-grid peta. b. Plotting titik-titik kerangka kontrol peta
• Koordinat titik-titik poligon (KKH)
• Elevasi titik poligon (KKV) c. Plotting titik-titik detail
Plotting titik-titik detail dapat dilakukan dengan cara:
• Cara Grafis : posisi horisontal dari titik-titik detail digambar secara langsung dengan bantuan alat-alat gambar (busur derajat dan penggaris skala), dan posisi vertikal titik detail langsung diplot dari hasil hitungan datanya.
• Cara numeris /digital : penggambaran titik-titik detail dengan menggunakan komputer.
d. Penggambaran obyek (detail)
Penggambaran titik-titik detail dapat dilakukan dengan menggunakan busur derajat dan mistar skala. Pusat busur diletakkan tepat pada titik tempat alat (P) dan skala busur diarahkan ke sumbuY. Bila sudut yang dibaca adalah azimuth, maka bacaan titik poligon harus disesuaikan dengan skala sudut pada busur derajat. Sedangkan titik detail yang lain dapat diplot sesuai dengan pembacaan sudut horisontal dengan pembacaan sudut horisontal dan jaraknya.
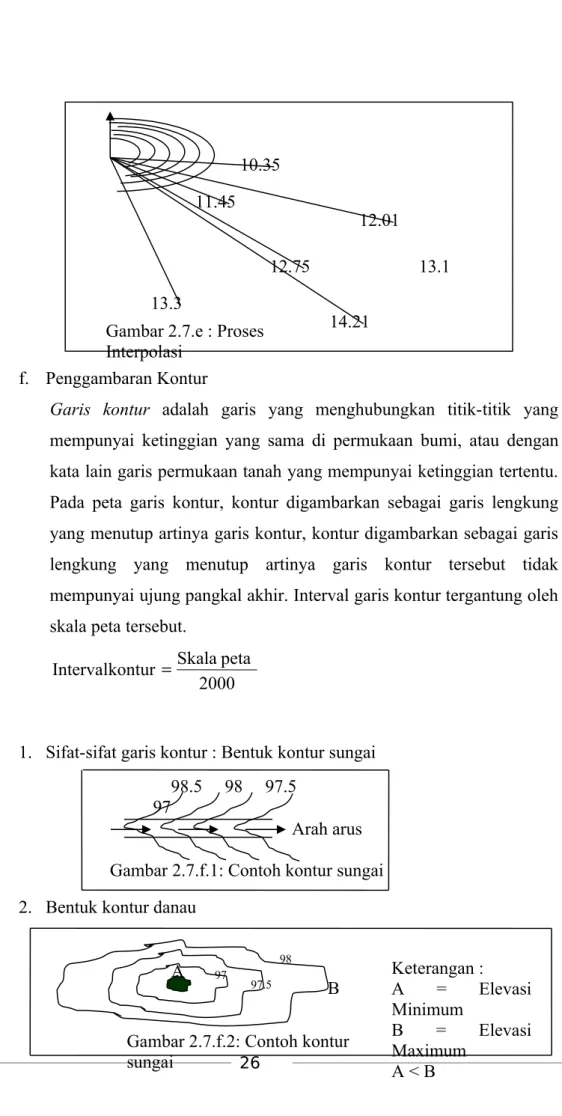
e. Interpolasi garis kontur
Garis-garis kontur tidak pernah berpotongan Ujung-ujung garis kontur akan bertemu kembali
Garis-garis kontur yang semakin rapat menginformasikan bahwa keadaan permukaan tanah semakin terjal
Garis-garis kontur yang semakin jarang menginformasikan bahwa keadaan permukaan tanah semakin datar/landai
f. Penggambaran Kontur
Garis kontur adalah garis yang menghubungkan titik-titik yang
mempunyai ketinggian yang sama di permukaan bumi, atau dengan kata lain garis permukaan tanah yang mempunyai ketinggian tertentu. Pada peta garis kontur, kontur digambarkan sebagai garis lengkung yang menutup artinya garis kontur, kontur digambarkan sebagai garis lengkung yang menutup artinya garis kontur tersebut tidak mempunyai ujung pangkal akhir. Interval garis kontur tergantung oleh skala peta tersebut.
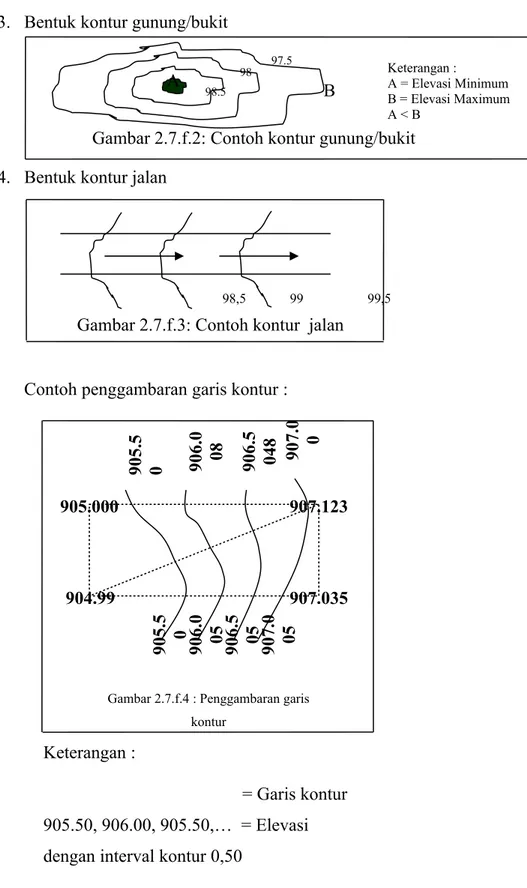
1. Sifat-sifat garis kontur : Bentuk kontur sungai
2. Bentuk kontur danau 2000 peta Skala kontur Interval = 11.45 10.35 12.01 12.75 13.1 13.3 14.21 Gambar 2.7.e : Proses
Interpolasi
98.5 98 97.5 97
Arah arus Gambar 2.7.f.1: Contoh kontur sungai
3. Bentuk kontur gunung/bukit
4. Bentuk kontur jalan
98,5 99 99,5
Contoh penggambaran garis kontur :
97.5 98 98.5
A B Keterangan :A = Elevasi Minimum
B = Elevasi Maximum A < B
Gambar 2.7.f.2: Contoh kontur gunung/bukit
98 98.5
Gambar 2.7.f.3: Contoh kontur jalan
904.99 907.035 907.123 905.000 90 6. 5 04 8 90 7. 0 0 90 6. 0 08 90 5. 5 0 90 5. 5 0 90 6. 0 05 90 6. 5 05 90 7. 0 05
Gambar 2.7.f.4 : Penggambaran garis kontur
Keterangan :
= Garis kontur 905.50, 906.00, 905.50,… = Elevasi dengan interval kontur 0,50
BAB III
PELAKSANAAN PRAKTIKUM 3.1. Orientasi Lapangan
Sebelum dilakukan pengukuran terlebih dahulu dilakukan persiapan untuk kelancaran praktikum dengan langkah-langkah sebagai berikut :
1. Pemeriksaan dan penentuan batas wilayah dimana praktikum akan dilaksanakan.
2. Memasang patok yang sudah dilengkapi dengan paku payung untuk titik-titik poligon.
3. Pemilihan alat yang akan digunakan sesuai dengan kebutuhan dan kondisi lapangan.
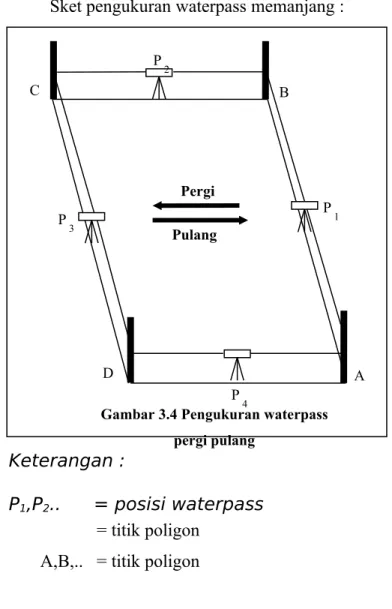
3.2. Pengukuran Waterpass Memanjang
Hari / Tanggal : Jum’at / 1 Agustus 2010
Lokasi : Jalan Kedung Ombo Kec. Lowokwaru Kab. Malang Alat yang digunakan :
1. Waterpass Wild NAK 1...1 buah 2. Statif……...1 buah 3. Rambu ukur...2 buah 4. Roll meter ...1 buah 5. Payung…...1 buah 6. Jalon……...2 buah
Materi Praktikum : Pengukuran waterpass pergi pulang Tujuan :
Untuk mengetahui beda tinggi antara masing-masing titik poligon sehingga bisa dihitung elevasinya.
Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran waterpass memanjang adalah sebagai berikut :
1. Dirikan alat diantara titik A dan titik B, usahakan tepat ditengah- tengah kedua titik tersebut kemudian centering alat waterpass sesuai prosedur.
2. Dirikan rambu ukur di titik A dan titik B
3. Bidik rambu ukur di titik A dengan alat waterpass, tepatkan perpotongan benang silang teropong pada bacaan rambu kemudian baca bacaan benang atas, benang tengah dan benang bawah dan catat sebagai bacaan rambu belakang titik A. Lakukan kontrol bacaan benang dengan menggunakan rumus :
2
bb ba
bt = +
4. Bidik rambu ukur di titik B dengan alat waterpass, tepatkan perpotongan benang silang teropong pada bacaan rambu kemudian baca bacaan benang atas, benang tengah dan benang bawah dan catat sebagai bacaan rambu muka titik B. Lakukan kontrol bacaan benang dengan menggunakan
rumus :
2
bb ba bt = +
5. Pindahkan alat pada posisi antara titik B dan titik C dan lakukan langkah pekerjaan seperti yang telah dijelaskan diatas sampai selesai.
Sket pengukuran waterpass memanjang :
3.3 Pengukuran Poligon Tertutup
Hari / Tanggal : Jumat / 1 Agustus 2010
Lokasi : Jalan Kedung Ombo Kec. Lowokwaru Kab. Malang Alat yang digunakan :
1. Theodolit Topcon TL 6...1 buah 2. Statif ...1 buah 3. Patok ...4 buah 4. Paku payung...4 buah 5. Payung ...1 buah 6. Roll meter ... 1 buah
B C A D Pergi Pulang P 1 P 2 P 3 P 4
Gambar 3.4 Pengukuran waterpass pergi pulang
Keterangan :
P1,P2.. = posisi waterpass
= titik poligon A,B,.. = titik poligon
Materi Praktikum : Pengukuran poligon tertutup
Tujuan :
Agar para mahasiswa mampu melakukan pengukuran poligon yang nantinya berfungsi sebagai titik ikat / titik kontrol dalam pemetaan. Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran poligon adalah sebagai berikut : 1. Orentasi lapangan dari daerah yang akan dipetakan dan menancapkan
patok-patok sebagai titik poligon pada tempat yang baik agar dapat melakukan pengukuran poligon dengan baik, antara patok belakang dengan patok muka harus saling kelihatan.
2. Patok-patok tersebut diberi nomor urut sesuai urutan dan masing-masing ujungnya dipasangkan paku payung.
3. Theodolit didirikan diatas titik (BMA) atau titik poligon awal dan lakukan centering optis terhadap paku payung kemudian diatur sesuai prosedur.
4. Bidikkan teropong theodolit secara kasar menggunakan visir pada titik (D) sebagai Backsight Theodolite dalam keadaan biasa, bidik tepat pada ujung kepala paku payung jika patok yang dipasang tersebut dapat terlihat oleh teropong. Jika paku payung tidak dapat dibidik secara langsung, gunakan bantuan jalon yang didirikan diatas patok yang diatasnya sudah ditancapkan paku payung kemudian bidik jalon tersebut.
5. Kunci penggerak limbus dan penggerak piringan horisontal serta penggerak piringan vertikal kemudian tepatkan perpotongan benang silang teropong pada paku payung dengan menggunakan penggerak halus horisontal maupun penggerak vertikal.
6. Baca bacaan skala horisontal dan catat sebagai bacaan “Biasa “ arah titik D.
7. Buka kunci penggerak piringan horisontal dan vertikal kemudian bidik titik B.
9. Buka kunci penggerak horisontal dan vertikal kemudaian putar Theodolite pada keadaan “ Luar Biasa “. Kemudian bidik titik D dan B dan baca skala piringan horisontalnya.
10. Untuk titik poligon selanjutnya (A-D) sampai selesai, langkah pengukuran sama dengan langkah pengukuran seperti yang tersebut diatas.
Sket pengukuran poligon :
Keterangan:
A,B,… : titik poligon S1,S2,… : sudut dalam
αAB : sudut azimuth matahari dAB,dBC… : jarak antar titik poligon Data poligon: S1: 84o 7’ 50” S2: 95o 12’ 20” S3: 81o 20’20” S4: 99o 19’20” dAB : 109.99 m dBC : 55.55 m dCD : 110.333 m dDA : 48.89 m αAB : 195o 27’19.33” αBC : 99o 35’ 11.83” αCD : 14o 47’34.33” αDA : 276o 7’56.83” D BM C S2 S3 S4 S1 A B αAB d DA dCD d BC dA B U
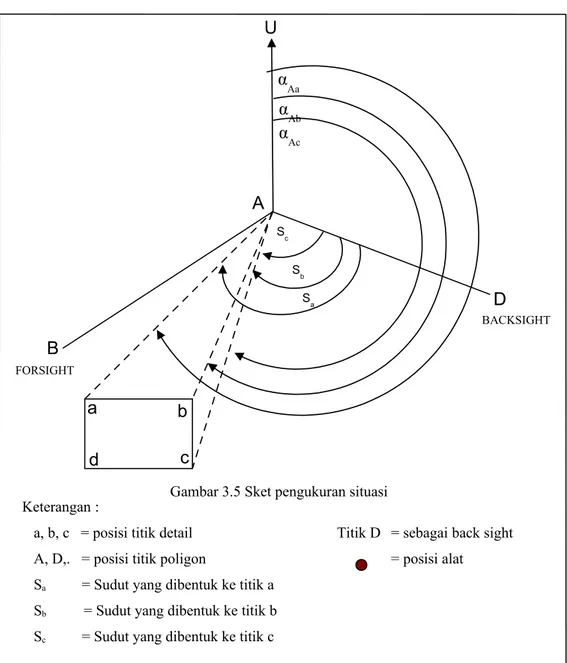
3.4 Pengukuran Detail
Hari / tanggal : Sabtu / 2 Agustus 2010
Lokasi : Jalan Kedung Ombo Kec. Lowokwaru Kab. Malang Alat yang digunakan :
1. Theodolit Topcon TL 6...1 buah 2. Statif ...1 buah 3. Rambu ukur...2 buah 4. Payung ...1 buah 5. Roll meter ...1 buah
Materi Praktikum : Pengukuran situasi / pengukuran detail Tujuan :
Untuk mengetahui besar sudut, jarak, dan elevasi dari titik detail yang akan diukur dan dipetakan.
Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran poligon adalah sebagai berikut :
1. Theodolit dirikan di titik A dan lakukan prosedur centering optis terhadap paku payung sesuai dengan prosedur.
2. Ukur tinggi alat dan tinggi patok dengan roll meter dan catat dalam formulir.
3. Back sight ke titik poligon terdekat ( titik D ) dan piringan skala horisontal ditepatkan pada bacaan 0 0 0’ 0” , kemudian kunci penggerak horisontal dan penggerak limbus.
4. Gambar sket dari titik-titik yang berada disekitar titik A yang akan diukur dan diberi nomor urut untuk memudahkan pencatatannya.
5. Dirikan rambu ukur pada titik detail yang akan diukur sesuai dengan gambar sketnya dengan dilengkapi nivo rambu.
6. Buka kunci penggerak horizontal, bidik rambu pada titik detail tersebut, kemudian baca bacaan benang atas, benang tengah dan
7. Pindahkan rambu ukur pada titik detail berikutnya sesuai dengan gambar dan lakukan pengukuran seperti langkah no.5 sehingga didapatkan titik detail disekitar titik poligon A terukur semua. 8. Pindahkan theodolit pada titik poligon B kemudian lakukan
centering optis terhadap paku payung dan atur sesuai prosedur. 9. Ukur kembali tinggi alat dan tinggi patok dengan roll meter dan
catat dalam formulir.
10. Lakukan langkah-langkah pengukuran seperti langkah pengukuran no.3 sampai no.9, sehingga titik detail terukur semua.
Sket pengukuran detail :
Keterangan :
a, b, c = posisi titik detail Titik D = sebagai back sight
A, D,. = posisi titik poligon = posisi alat
Sa = Sudut yang dibentuk ke titik a
Sb = Sudut yang dibentuk ke titik b
Sc = Sudut yang dibentuk ke titik c A D B U S c BACKSIGHT S b Sa b a c d αAc αAb αAa FORSIGHT
3.5 Pengamatan Azimuth Matahari
Hari / Tanggal : Minggu / 3 Agustus 2010 Lokasi : Jalan Kedung Ombo Malang Alat yang digunakan :
1. Theodolit Topcon TL 6 ...1 buah 2. Statif 1 buah
3. Tadah 1 buah 4. Payung 1 buah
Materi Praktikum : Pengukuran azimuth matahari Tujuan :
Untuk menghitung azimut matahari dari daerah yang akan dipetakan Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran poligon adalah sebagai berikut : 1. Dirikan Theodolit disalah satu titik poligon ( titik D), dan
lakukan centering optis terhadap paku payung kemudian atur theodolit sesuai prosedur.
2. Bidikkan teropong pada titik yang lain ( titik A), bidik tepat pada paku payung. Jika paku payung tidak dapat dibidik secara langsung, gunakan bantuan jalon yang didirikan diatas patok kemudian bidik jalon tersebut.
3. Kunci penggerak limbus dan penggerak horisontal serta penggerak vertikal kemudian tepatkan perpotongan benang silang teropong pada paku payung dengan menggunakan penggerak halus horisontal maupun penggerak vertikal dan catat sebagai bacaan “ Biasa “.
4. Buka pengunci penggerak horisontal dan vertikal, bidik matahari dengan menggunakkan visir. ( jangan sekali-kali membidik matahari langsung dengan menggunakan mata karena bisa mengakibatkan kerusakan pada mata).
6. Tepatkan bayangan matahari pada kuadran I pada perpotongan benang silang teropong .
7. Jika bayangan matahari sudah berhimpit dengan perpotongan benang silang pada kuadran I, baca detik, menit dan jam dan piringan horisontal dan vertikal dan baca sebagai bacaan “ Biasa”. 8. Buka kunci penggerak horisontal dan vertikal, putar
theodolit pada kedudukan luar biasa dan ulang langkah pengukuran no.2-7 untuk mendapatkan bacaan “ Luar Biasa “ pada posisi bayangan matahari di kuadran I.
9. Untuk pengukuran selanjutnya bayangan matahari berada di kuadran III, Kemudian di kuadran II dan terakhir di kuadran IV. Lakukan pengamatannya dengan mengikuti langkah pekerjaan seperti yang dijelaskan diatas.
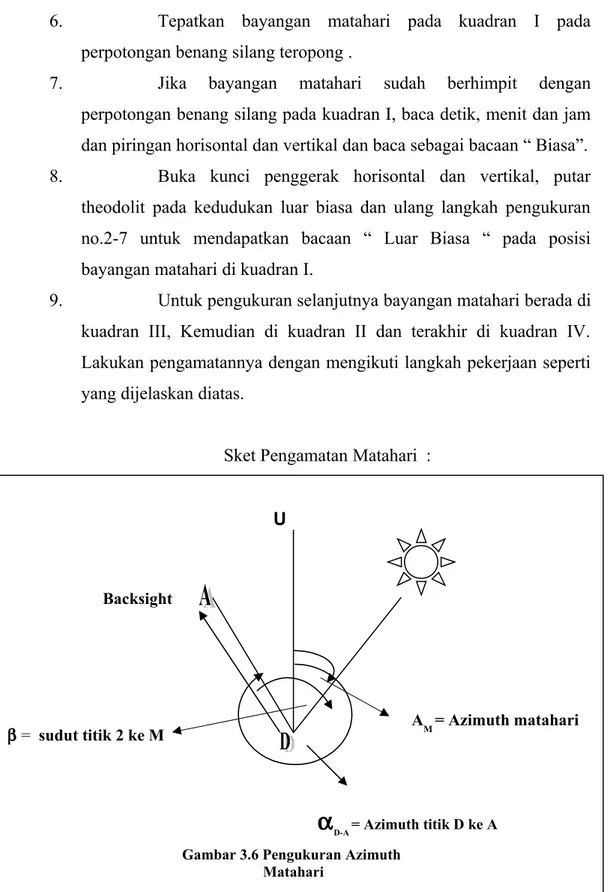
Sket Pengamatan Matahari :
AM = Azimuth matahari
α
D-A = Azimuth titik D ke A Backsightβ = sudut titik 2 ke M
U
Gambar 3.6 Pengukuran Azimuth Matahari
Bayangan matahari di kuadran I :
Bayangan matahari di kuadran II :
Bayangan matahari di kuadran III :
Bayangan matahari di kuadran IV :
Keterangan:
↓ = Arah bayangan matahari
3.6. Penggambaran Detail
Setelah tahap perhitungan selesai, tahap selanjutnya adalah tahap penggambaran. Penggambaran detail ini dapat dilakukan dengan bantuan atau memakai busur derajat. Penggambaran yang kami adalah penggambaran peta situasi dengan skala 1: 250.
Adapun tahap penggambaran situasi adalah sebagai berikut: 1. Tahap pertama:
• Mempersiapkan alat-alat yang akan digunakan
• Mempersiapkan data yang telah diolah untuk diplot atas kertas milimeter.
• Pengeplotan titik-titik kerangka dasar horisontal berdasarkan koordinat hasil perhitungan poligon.
• Pengeplotan titik-titik detail dari hasil pengukuran situasi.
• Pada titik-titik detail tersebut langsung ditulis elevasinya. 3. Tahap ketiga:
• Penarikan garis kontur dengan cara interpolasi.
• Pada setiap garis kontur dicantumkan ketinggiannya. 4. Tahap keempat:
• Setelah tahap-tahap diatas selesai kemudian dipindahkan atau diplot diatas kertas kalkir dengan mamakai rapido.
BAB IV
HASIL DAN PEMBAHASAN
4.1. Hasil
4.1.1. Perhitungan Azimuth Matahari
Langkah perhitungan azimuth matahari : 1. Tinggi matahari (hu)
(hu) Biasa = 90º 00’00” - bacaan vertikal = 90º 00’00” - 56º 22‘ 20” = 33º 37’40”
(hu) Luar biasa = bacaan vertikal – 270º 00’ 00” = 308º 57’ 10”- 270º = 38º 57’ 10” 2. Koreksi refraksi (r) (r) biasa = -58” . ctg hu = -58” . ctg 33º 37’40” = -0º 1’ 27.2” (r) luar biasa = -58” . ctg hu = -58” . ctg 38º 57’ 10” = -0º 1’ 11.74” 3. Koreksi paralaks (p) (p) Biasa = 8,8” . Cos hu = 8,8” . Cos 33º 37’40” = 0º 0’ 7.327”
(p) Luar Biasa = 8,8” . Cos hu
= 8,8” . Cos 38º 57’ 10” = 0º 0’ 6.843”
4. Koreksi ½ d
Koreksi ½ d didapat dari tabel Almanak Matahari pada tanggal 14 Desember dengan penjelasan sebagai berikut :
Kuadran III = 00º 16’ 16” Kuadran IV = 00º 16’ 16” 5. Tinggi pusat matahari (h)
Biasa (h) = hu + r + p + ½ d = 33º 37’40” + (-0º 1’ 27.2”) + 0º 0’ 7.327” – 00º 16‘ 16” = 33º 52’ 36.12” Luar Biasa (h) = hu + r + p + ½ d =38º 57’ 10” + (0º 1’ 11.74”) + 0º 0’ 6.843” 00º 16‘ 16” = 39º 12’ 21.10” 6. Lintang pengamatan (θ )
Pada peta pengamatan topografi untuk daerah yang bersangkutan, Lintang pengamatan ( θ ) = 7º 57‘ 34.89” LS
7. Deklinasi ( δ )
Dari tabel deklinasi matahari pada pukul 07.00 di peroleh 23°12’58.9’’ dan perubahan yang terjadi setiap jam adalah -0°0’8.4’’ dan pengamatan matahari pertama kali dilakukan pada pukul 07:46:30, maka :
Nilai pada bacaan biasa :
Selisih waktu pengamatan dengan jam 07:00 = 07 jam 00 menit 00detik = 07 jam 46 menit 30 detik _ = 00 jam 46 menit 30 detik = 0.775 jam
Sehingga perbedaan deklinasi ( ∆δ ) = 0.775 × -0°0’8.4’’ = -0° 0’ 6.51”
Sehingga deklinasi (δ) pada jam 06:28 = 23°12’58.9” - 0° 0’ 6.51” = 23º 12’ 52.39”
Nilai pada bacaan luar biasa :
Selisih waktu pengamatan dengan jam 07:00 = 07 jam 00 menit 00detik = 06 jam 52 menit 10 detik _
= 00 jam 52 menit 10 detik = 0.87 jam
Sehingga perbedaan deklinasi ( ∆δ ) = 0.87 × - 0°0’8.4’’ = -0° 0’ 7.31”
Sehingga deklinasi (δ) pada jam 06:28 = 23°12’58.9” - 0° 0’ 7.31” = 23º 12’ 51.59”
8. Azimuth pusat matahari Cos A = Cosh Cos Sin . θ sinh) . θ (sin δ− =
37'40"
33º
''
89
.
34
'
57
7
)
37'40"
33º
''
89
.
34
'
57
7
(
51.59"
12'
23º
Cos
Cos
Sin
Sin
Sin
×
°
×
°
−
A = 112° 40’ 40.9” 9. Koreksi ½ d . sec h = Koreksi ½ d . cosh 1 = 00º 16‘ 16”.37'40"
33º
cos
1
= 0° 0’ 28.81”Koreksi ½ d sec h yang didapat sebesar 0° 0’ 28.81” 10. AP = Azimuth titik acuan
= ((180º - β)+ A) + 180º + Koreksi ½ d . sech = ((180º - 84º7’50”) + (112° 40’ 40.9”) + 180º +
11. Azimuth matahari rata-rata = ∑Ap / 4
= (195°41'9.71''+ 195°17’21.36”+ 196°7’3.57”+ 194°43’42.7”)/8 = 195°27'19.33''
4.1.2. Perhitungan Poligon
a. Perhitungan Sudut Horizontal (β)
• Sudut horizontal yang dipakai dalam perhitungan poligon adalah sudut horizontal rata-rata.
∑β = βA + βB + βC + βD
= 84º7’50”+ 95º12’20”+ 81º20’20”+ 99º19’20” = 359º59’50”
Koreksi sudut β (horizontal) = 360° - ∑β
= (360°- 359º59’50”)/4 titik
= 0°0’10”/4 titik = 0°0’2,5” Keterangan : βA = sudut horizontal di titik A
∑β = jumlah sudut horizontal
b. Perhitungan Azimuth ( α )
• Untuk azimuth awal didapatkan dengan menggunakan metode pengamatan tinggi matahari.
• Untuk azimuth lainnya dihitung dengan menggunakan rumus :
α = (αawal + 180°) + (β + koreksi sudut β) - 360° contoh perhitungan:
αP1-P2 = (αawal + 180°) + (βP1-P2 + koreksi sudut β) - 360° = (195°27’19.33”+180°) + (84°7’50” + 0°0’2.5”) –
360°
= 99º35’11.83” dst.
Keterangan : α : azimuth yang dicari
αawal : azimuth awal
β : sudut horizontal
c. Perhitungan Jarak
Dalam pengukuran kerangka kontrol horizontal, jarak yang diambil adalah jarak langsung, pengukurannya menggunakan dengan roll meter.
No.
Bacaan Jarak Jarak Rata-rata Pergi (m) Pulang (m) P1 – P2 110 48.6 79.3 P2 – P3 55.2 108.2 81.7 P3 – P4 109.6 55.8 82.7 P4 – P1 45 103.8 74.4 Σd 318.10
• ΔX = d sin α ΔX1 = 109.99 sin 99°35’11.83” = 108.454 • ΔX2 = 55.55 sin 14º47’34.33” = 14.183 dst. • ∑ ΔX = -0.093 • Koreksi ∑ ΔX
Untuk mencari koreksi digunakan rumus:
F ∑ΔX = (∑ ΔX*jarak)/jumlah jarak
F ∑ΔX = -(-0.093*109.99)/324.76 = 0.031
(koreksi dibagi sesuai dengan porsi kesalahan, semakin besar nilai kesalahan maka semakin besar koreksinya, begitu juga sebaliknya.) Dst. • ΔY = d cos α ΔY1 = 109.99 cos 99°35’11.83” = -18.318 ΔY2 = 55.55 cos 14º47’34.33” = 53.709 dst. ∑ ΔY = 0.056 • Koreksi ∑ ΔY
Untuk mencari koreksi digunakan rumus:
F ∑ΔY = (∑ ΔY*jarak)/jumlah jarak
F ∑ΔY = (0.056*109.99) / 324.76 = -0.019
(koreksi dibagi sesuai dengan porsi kesalahan, semakin besar nilai kesalahan maka semakin besar koreksinya, begitu juga sebaliknya.)
• Keterangan : ΔX : absis ΔY : ordinat ∑ΔX : jumlah absis ∑ΔY : jumlah ordinat
D : jarak
α : azimuth
F∑ΔX : koreksi jumlah absis F∑ΔY : koreksi jumlah ordinat
Perhitungan Koordinat Titik Poligon
1. Diketahui koordinat awal titik poligon ( BMA) adalah : Xawal = 2000.000
Yawal = 2000.000
Maka koordinat pada titik poligon dapat diketahui dengan rumus:
= 2108.485
YA = 2000.000 + (-18.318) + (-0,019) = 1981.664
2. Data koordinat UTM / Grid yang didapat dari GPS Handheald hasilnya sebagai berikut :
Xawal = 677615.958 Yawal = 9119812.356 XA = 677615.958 + (108.454)+ (0.031) = 677724.443 YA = 9119812.356 + (-18.318) + (-0,019) = 9119794.020
Data koordinat yang didapat dari perhitungan :
Ketelitian Linier Poligon
Perhitungan ketelitian linier poligon menggunakan rumus sebagai berikut: D CD KL ∑ = ( X)2 ( Y)2 CD Dimana = ∆ + ∆ Keterangan rumus :
CD = Kesalahan Penutup Jarak KL = ketelitian linier
ΣD = jumlah jarak poligon f(∆X) = kesalahan penutup absis f(∆Y) = kesalahan penutup ordinat
2 2 (0.056) ) -0.093 ( + = CD Sehingga = 0.108 76 . 324 0.108 = KL = 1 : 2997.469
Jadi ketelitian linier poligon dalam pengukuran ini adalah 1 : 2997
4.1.3. Perhitungan Waterpass Memanjang
Perhitungan beda tinggi dan Elevasi titik poligon.
Untuk perhitungan beda tinggi tiap-tiap titik poligon menggunakan rumus sebagai berikut :
∆h12 = btB - btM
Keterangan :
∆h12 = beda tinggi antara dua titik ( titik 1 ke titik 2 ) btB = bacaan benang tengah rambu belakang
btM = bacaan benang rambu muka Hitungan ∆h pergi : ∆h12 = 0.954 – 2.042 = -1.088 ∆h23 = 1.571 – 0.998 = 0.573 ∆h34 = 2.162 – 1.345 = 0.817 ∆h41 = 1.256 - 1.566 = -0.310 Hitungan ∆h pulang : ∆h = 1.524 - 1.213
= -0.821
∆h32 = 1.031 - 1.606 = -0.575
∆h21 = 2.013 – 0.924 = 1.089
Jadi selisih beda tinggi (∆h) pada pengukuran pergi dan pulang adalah :
∆hpergi + ∆hpulang = -0.008 + 0.004 = -0.004
Pada poligon tertutup, jumlah beda tinggi yang diukur dengan waterpass pergi pulang harus sama dengan nol (0) atau mendekati nol (0), karena pengukuran kembali ketitik semula.
Toleransi kesalahan dari pengukuran waterpass pergi pulang yang diberikan adalah 8√d
o Dari pengukuran pergi
Dengan jarak pengukuran pergi 319.8 m = 0,3198 km maka : Ketelitian : 8√0.3198 = 4.524 mm
o Dari pengukuran pulang
Dengan jarak pengukuran pulang 322.8 m = 0,3228 km maka : Ketelitian : 8√0.3228 = 4.545 mm
Jadi pengukuran waterpass memanjang pergi – pulang masih dalam toleransi yang ditentukan, yaitu 8 D . Maka dapat disimpulkan
bahwa selisih hasil pengukuran beda tinggi pergi-pulang termasuk dalam toleransi. Dan data yang digunakan adalah data pengukuran pergi – pulang.
Rumus yang digunakan untuk menghitung elevasi adalah :
H1 = Hawal ±∆h1 ± koreksi Keterangan :
H1 = Elevasi titik1
Hawal = Elevasi yang diketahui
∆h12 = Beda tinggi titik 1 ke titik 2 Perhitungan data hasil pengukuran :
= 499.533 + (-1.088 - 0.00200) = 498.477
Untuk menghitung Jarak pada pengukuran waterpass memanjang menggunakan rumus sbb :
D = (ba-bb)*100
Keterangan : D = Jarak
ba = bacaan benang atas bb = bacaan benang bawah contoh :
Perhitungan jarak pada pengukuran pergi : D1 = (ba1 – bb1)*100
= (1.246-0.662)*100 = 58.4 meter
dst.
Perhitungan jarak pada pengukuran pulang : D1 = (ba1 – bb1)*100
= (1.630-1.418)*100 = 21.2 meter
dst.
4.1.4. Perhitungan Titik Detail
Hasil pengukuran titik-titik detail yang diperoleh di lapangan dibagi menjadi :
1. Perhitungan jarak
Penghitungan data hasil pengukuran : Dm = ( ba – bb ) . 100
= ( 1.627-1.137 ) . 100 = 49 m
Dd = Dm . Sin²α
2. Perhitungan beda tinggi titik detail
Untuk perhitungan beda tinggi titik-titik detail menggunakan metode trigonometris, dengan rumus :
∆h = ( Ti – bt ) + Dd . Cotg α = ( 1.550- 1.382 ) + 48.99 x
"
20
'
49
89
1
otg
= 0.1525 mUntuk data perhitungan beda tinggi selengkapnya dapat dilihat pada formulir di lembar lampiran.
3. Perhitungan elevasi titik-titik detail Untuk perhitungan digunakan rumus :
H = Hawal ±∆h1 = 200.000 - 0.1525 = 199.8475 m
Untuk perhitungan elevasi yaitu Hawal ± ∆h1 (beda tinggi di titik detail Perhitungan selanjutnya dapat dilihat pada lampiran data tabel pengukuran.
4. Perhitungan koordinat Easting dan Northing titik-titik detail
Koordinat Easting dan Northing didapat dari Handheald, yang dicari adalah koordinat titik poligon yang nantinya akan dipakai pada penghitungan titik detail.
Perhitungan koordinat Easting dan Northing titik detail menggunakan rumus dibawah ini:
X1 = Xawal + (Dd* sin (azimuth + sudut horizontal)) = 677615,958 + (47.80*sin(101.1199538)) = 677662.8606
Y1 = Yawal + (Dd* cos (azimuth + sudut horizontal)) = 9119812.356+ (47.80*cos(101.1199538)) = 9119803.137
X1 = koordinat Easting baru Y1 = koordinat Northing baru Xawal = koordinat Easting awal Yawal = koordinat Northing awal Dd = jarak datar
4.2. Pembahasan
4.2.1. Pengamatan Azimuth Matahari
Dalam pengukuran azimuth matahari menggunakan metode tinggi matahari yaitu dengan cara menadah bayangan matahari pada selembar kertas. Bayangan matahari diletakkan pada kuadran yang telah ditentukan dan pengukurannya dilakukan secara Biasa dan Luar Biasa. Maksud dari pengukuran azimuth matahari adalah untuk mendapatkan nilai tinggi matahari, koreksi refraksi, koreksi paralaks, koreksi ½ diameter matahari, tinggi pusat matahari, dan deklinasi, dimana semua data tersebut digunakan sebagai referensi dalam menentukan azimuth rata-rata matahari dan azimuth ini dipakai sebagai azimuth awal pada penggambaran peta topografi. Jadi Azimuth rata-rata matahari adalah 195°27'19.33''
4.2.2. Poligon Tertutup
4.2.2.1. Pengukuran dan Perhitungan Sudut
Dalam pengukuran poligon tertutup ini, metode pengukuran sudut yang digunakan adalah metode pengukuran sudut satu seri rangkap. Metode ini dimaksudkan supaya data sudut yang diperoleh dapat lebih akurat. Pengukuran dengan pengukuran 1 seri rangkap, yaitu dengan melakukan 4 kali pembacaan (sudut horizontal biasa dan luar biasa) sehingga didapatkan sudut dalam rata – rata, dan dihitung dengan rumus yang telah di bahas sebelumnya.
4.2.2.2. Pengukuran dan Perhitungan Jarak
ukur theodolite maupun waterpass melalui pembacaan benang silang (benang atas, benang tengah, benang bawah) pada rambu ukur.
4.2.2.3. Perhitungan Kesalahan Sudut dan Ketelitian Linier
Dari pengukuran poligon tertutup diperoleh data sebagai berikut :
Sudut yang diukur adalah sudut dalam dengan menggunakan metode satu seri rangkap.
Jumlah sudut dalam adalah (n-2).180 = 360º00’00”, tetapi dalam pengukuran didapat jumlah sudut dalam 359º59’50”, jadi kesalahan sudut yang harus dikoreksi sebesar 0º0’10”
Ketelitian Linier poligon dalam pengukuran ini adalah 1 : 2997 dan dihitung dengan rumus yang telah di bahas sebelumnya.
4.2.3. Pengukuran dan Perhitungan Waterpass Memanjang
Pada poligon tertutup, jumlah beda pengukuran waterpass pergi pulang harus sama dengan nol (0) atau mendekati nol (0), karena pengukuran kembali ke titik semula.
Toleransi kesalahan dari pengukuran waterpass pergi pulang yang diberikan adalah 8√d.
BAB V PENUTUP
5.1. Kesimpulan
Dari pelaksanaan praktikum ini, dapat disimpulkan bahwa dalam pengukuran ini adalah sebagai berikut :
1. Ketelitian linier poligon ditentukan oleh jarak yang dipakai untuk pengukuran, makin teliti jarak ketelitian linier maka poligon makin teliti.
Kesalahan jarak yang dapat terjadi : a. Kelengkungan pita rol meter b. Pelurusan kurang baik
c. Kesalahan pengiraan/pembacaan pada rol meter
2. Terjadinya penyimpangan beda tinggi antara titik awal pengukuran dan titik akhir pengukuran pada poligon tertutup disebabkan oleh : a. Kesalahan pengiraan/pembacaan bacaan pada rambu ukur b. tidak tegaknya rambu ukur pada saat pembacaan
c. karena refraksi atmosfir
3. Dengan melihat garis kontur dapat diketahui kondisi suatu daerah, misal :
perbukitan, lembah, ataupun sungai. Garis kontur juga dapat membantu pekerjaan teknik seperti pembangunan bendungan, jalan dan lain-lain.
4. Kesalahan dan hambatan dalam melakukan pengukuran/pekerjaan lapangan adalah :
a. Kurang teliti dalam mengambil data di lapangan b. Alat yang dipakai tidak dikoreksi dengan baik c. Keadaan alam dan cuaca yang kurang mendukung
5.2. Saran
1. Sebelum melakukan pengukuran, sebaiknya diadakan survey lokasi yang akan diukur.
2. Gunakan alat yang sesuai dengan kegunaanya serta memenuhi syarat. 3. Periksa alat ukur sebelum ke lokasi, untuk memastikan apakah alat
ukur tersebut siap untuk digunakan atau tidak.
4. Persiapkan formulir ukur dan alat yang lain yang diperlukan dalam pengukuran di lapangan.
5. Dalam pengamatan azimuth matahari hendaknya harus memperhatikan waktu pengamatan karena ini mempengaruhi pada proses perhitungan azimuth.
6. Pelaksanaan praktikum sebaiknya dilakukan pada saat liburan jangan sampai mengganggu jam kuliah.
DAFTAR PUSTAKA
• Basuki Slamet. 2006. Ilmu Ukur Tanah. Gajah Mada University Press. Yogyakarta.