ANALISIS PENGARUH PENAMBAHAN INVERTER TERHADAP KINERJA MOTOR INDUKSI TIGA FASA ROTOR BELITAN
Diajukan untuk memenuhi persyaratan menyelesaikan pendidikan sarjana (S-1) pada
Departemaen Teknik Elektro Sub konsentrasi Teknik Energi Listrik Oleh
SATRIA YUDHA
100402018
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
2017
ABSTRAK
Pada umumnya,di bidang industri saat ini banyak kita jumpai pabrik yang menggunakan motor induksi 3 fasa sebagai penggeraknya. Hal ini di karenakan motor induksi memiliki keunggulan dibandingkan dengan jenis motor lain, diantaranya memiliki efisiensi yang relatif tinggi, konstruksi yang kuat serta mudah dalam perawatannya. Namun motor jenis ini punya kelemahan, yaitu sukar dalam mengatur putarannya.
Kecepatan putaran motor induksi dapat diatur dengan menggunakan suatu alat elektronika tambahan berupa Inverter. Inverter ini digunakan untuk mengendalikan frekuensi input pada motor induksi.
Penelitian ini dilakukan untuk mengetahui pengaruh penambahan inverter terhadap kinerja motor induksi 3 fasa rotor belitan . Pengujian ini dilakukan pada saat motor induksi bekerja tanpa inverter dan pada saat motor bekerja menggunakan inverter . Dari hasil pengujian, didapatkan bahwa saat motor bekerja tanpa inverter dengan saat motor bekerja dengan inverter pada frekuensi 50 Hz, maka inverter menyebabkan arus dan faktor daya semakin besar, sedangkan efisiensi, tegangan dan putaran menurun.
Kata kunci: Motor Induksi , Inverter, rotor belitan, frekuensi, kinerja motor induksi
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa atas rahmat dan karunia yang dilimpahkan-Nya kepada penulis, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “ANALISIS PENGARUH PENAMBAHAN INVERTER TERHADAP KINERJA MOTOR INDUKSI TIGA FASA ROTOR BELITAN”.Penulisan tugas akhir ini merupakan salah satu persyaratan untuk menyelesaikan studi dan memperoleh gelar Sarjana Teknik di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
Selama masa perkuliahan sampai masa penyelesaian tugas akhir ini, penulis banyak memperoleh bimbingan dan dukungan dari berbagai pihak.
Penulis menyadari betul setiap berkat, doa, motivasi, dan bimbingan yang penulis peroleh selama proses tersebut. Untuk itu, dengan setulus hati penulis menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Bapak Ir. Surya Tarmizi Kasim, M.si, selaku Ketua Departemen Teknik Elektro FT-USU dan Bapak Ir. Rahmat Fauzy, MT, selaku Sekretaris Departemen Teknik Elektro FT-USU.
2. Bapak Ir. Raja Harahap, MT, selaku dosen Pembimbing Tugas Akhir, atas segala bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas Akhir ini.
3. Bapak Ir. Syamsul Amien M.S, selaku dosen penguji tugas akhir serta selaku Kepala Laboratorium Konversi Energi Listrik yang telah banyak memberikan masukan demi perbaikan tugas akhir ini dan telah banyak motivasi selama masa perkuliahan.
4. Bapak Ir. Surya Tarmizi Kasim, M.si, selaku penguji tugas akhir serta selaku Kepala Departemen Teknik Elektro FT-USU atas bimbingan dan masukan demi perbaikan tugas akhir ini selama masa perkuliahan.
5. Bapak Soeharwinto,ST,MTselaku dosen wali penulis, atas motivasi dan bimbingannya kepada penulis selama mengikuti proses perkuliahan.
6. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh Karyawan di Jurusan Teknik Elektro Fakultas Teknik Elektro USU.
7. Bapak Tobok Marganda Simatupang,ST, Hefri Yuliadi, S.Pd, Drs. B.
Aritonang, ST, dan seluruh staf Departemen Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK), yang telah bersedia membantu penulis dalam proses pengambilan data penelitian tugas akhir ini.
8. Orang tua yang saya cintai dan banggakan, bapak Ipda Gomgom Tampubolon dan ibu Nur Betty br. Siagian atas semangat, didikan, waktu dan doanya selama penulisan tugas akhir ini.
9. Adik-adik saya, Julius Fernando Tampobolon dan Aldi Mastara, atas motivasi,canda dan pengertian kalian sebagai adik yang bisa dibanggakan.
10. Teman-teman elektro 10; Ronaldo Saragih, Daniel Sembiring, Cristover Pasaribu, Reikson Parhusip, Lasmen Sitompul, Enjoi Sinaga, Fontes Mapaung, Alex Sihombing, Doni Manalu,Adi Mahyudi dan teman-teman 2010 lain yang tidak dapat penulis sebutkan satu per satu.
11. Semua abang-kakak senior dan adik-adik junior yang telah mau berbagi pengalaman dan motivasi kepada penulis.
12. Semua orang yang tidak dapat penulis sebutkan satu per satu, penulis ucapkan terimakasih banyak.
Penulis menyadari bahwa tugas akhir ini tidak luput dari kesalahan- kesalahan, baik dari segi tata bahasa maupun dari segi ilmiah. Untuk itu, penulis akan menerima dengan terbuka, segala saran dan kritik yang ditujukan untuk memperbaiki Tugas Akhir ini. Akhir kata, semoga Tugas Akhir ini bermanfaat bagi penulis dan pembaca.
Medan, Agustus 2016 Penulis
Satria Yudha
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... xi
BAB I ... 1
PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Perumusan Masalah ... 2
1.3. Tujuan ... 2
1.4. Batasan Masalah ... 2
1.5. Manfaat ... 3
BAB II ... 4
TINJAUAN PUSTAKA ... 4
2.1. Motor Induksi ... 4
2.1.1. konstruksi motor induksi ... 5
2.1.2. Prinsip kerja motor induksi ... 8
2.1.3. Slip ... 9
2.1.4. Rangkaian ekivalen motor induksi ... 10
2.1.5. Daya dan rugi-rugi motor induksi ... 11
2.1.6. Efisiensi Motor Induksi ... 12
2.2. Pengaturan putaran motor induksi ... 17
2.2.1. Mengubah Jumlah Kutub Motor ... 17
2.2.2. Mengubah Frekuensi Jala-jala ... 18
2.2.3. Mengatur Tegangan Jala-jala ... 18
2.2.4. Pengaturan Tahanan Luar ... 18
2.3. Inverter ... 19
2.4. Pembentukan Gelombang AC Pada Inverter ... 20
BAB III ... 23
METODE PENELITIAN ... 23
3.1. Tempat dan Waktu ... 23
3.2. Bahan dan Peralatan ... 23
3.3. Variabel yang diamati ... 24
3.4. Prosedur Penelitian ... 24
3.4.1. Percobaan Motor induksi 3 Fasa tanpa inverter ... 25
3.4.2. Percobaan Motor Induksi 3 Fasa dengan inverter ... 26
3.5. Pelaksanaan Penelitian ... 28
3.5.1 Proses Pengumpulan Data ... 28
BAB IV ... 30
HASIL PENELITIAN DAN PEMBAHASAN ... 30
4.1 Umum ... 30
4.2. Data Percobaan ... 31
4.2.1. Percobaan motor induksi 3 fasa rotor belitan tanpa inverter ... 31
4.2.2. Percobaan Motor Induksi 3 fasa rotor belitan dengan inverter ... 32
4.3. Analisa Data dan Perhitungan Data ... 34
4.3.1. Analisa dan Perhitungan slip dan efisiensi motor induksi tanpa inverter
... 34
4.3.2. Analisa dan Perhitungan slip dan efisiensi motor induksi dengan inverter ... 38
BAB V ... 52
PENUTUP ... 52
5.1. Kesimpulan ... 52
5.2. Saran ... 53
DAFTAR PUSTAKA LAMPIRAN
DAFTAR GAMBAR
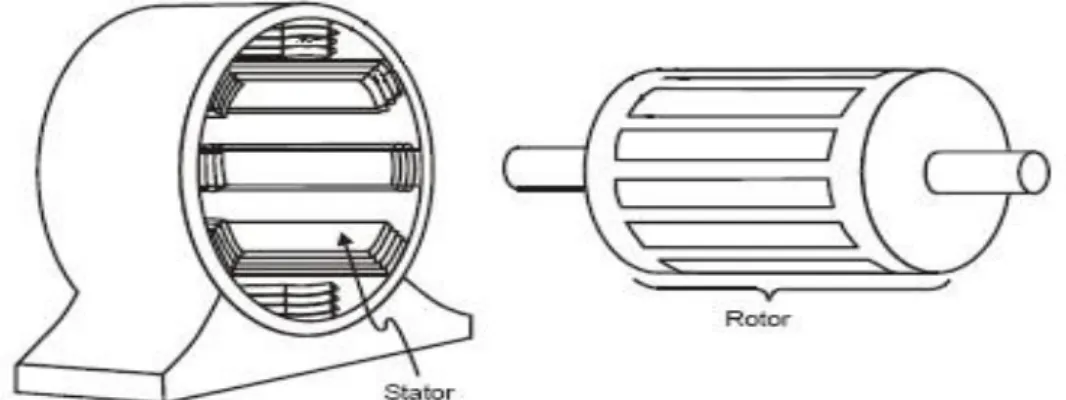
Gambar 2.1 Penampang stator dan rotor motor induksi tiga fasa ... 5
Gambar 2.2 (a) Tampilan slip ring rotor belitan (b) Motor induksi tiga fasa rotor belitan ... 7
Gambar 2.3 (a) Motor induksi tiga fasa rotor sangkar tupai (b) Rotor sangkar tupai dan bagian-bagiannya ... 7
Gambar 2.4 Rangkaian ekivalen rotor per- fasa (a) Menyatakan persamaan 2.5 (b) menyatakan persamaan 2.6 (c) menyatakan persamaan 2.7 ... 10
Gambar 2.5 Rangkaian ekivalen per-fasa motor induksi dengan bagian rangkaian rotor dinyatakan terhadap sisi stator ... 11
Gambar 2.6 Kehilangan daya pada motor ... 13
Gambar 2.7 Grafik suhu vs umur isolasi (per IEEE 117 & 101) ... 15
Gambar 2.8 Grafik kecepatan vs torsi ... 16
Gambar 2.9 Inverter dengan skala transistor ... 20
Gambar 2.10 Bentuk pulsa-pulsa trigger dan keadaan on untuk transistor (Tr1 sampai dengan Tr6) ... 22
Gambar 2.11 Bentuk tegangan output yang terjadi (VRS, VST, VTR) ... 22
Gambar 3.4 Rangkaian percobaan motor induksi tiga fasa tanpa inverter ... 25
Gambar 3.5 Rangkaian percobaan motor induksi tiga fasa disuplai
dengan penambahan inverter ... 26 Gambar 3.6 Diagram alur proses pengambilan data (tanpa
inverter) ... 28 Gambar 3.7 diagram akurr proses pengambilan data (dengan
inverter) ... 29 Gambar 4.1 Grafik beban vs kecepatan motor induksi tanpa
inverter(50 Hz) ... 37 Gambar 4.2 Grafik beban vs slip motor induksi tanpa inverter(50
Hz) ... 37 Gambar 4.3 Grafik beban vs kecepatan motor induksi dengan
penambahan inverter (30 Hz) ... 40 Gambar 4.4 Grafik beban vs slip motor induksi disuplai dengan
penambahan inverter (30 Hz) ... 40 Gambar 4.5 Grafik beban vs kecepatan motor induksi dengan
penambahan inverter (40 Hz) ... 44 Gambar 4.6 Grafik beban vs slip motor induksi dengan
penambahan inverter (40 Hz) ... 45 Gambar 4.7 Grafik beban vs kecepatan motor dengan penambahan
inverter (50 Hz) ... 48
Gambar 4.8 Grafik beban vs slip motor induksi dengan
penambahan inverter (50 Hz) ... 48 Gambar 4.9 Grafik kecepatan vs beban motor induksi tanpa
inverter dengan motor induksi dengan penambahan
inverter ... 49 Gambar 4.10 Grafik beban vs efisiensi motor induksi tanpa inverter
dengan motor induksi dengan penambahan inverter ... 50 Gambar 4.11 Grafik frekuensi vs arus motor induksi tanpa inverter
dengan motor induksi dengan penambahan inverter ... 50
DAFTAR TABEL
Tabel 2.1 Pengaruh ketidakseimbangan tegangan dalam motor
induksi (BEE India, 2004) ... 14 Tabel 4.1 Tabel hasil pengujian motor induksi tanpa inverter
(50hz) ... 32 Tabel 4.2 Tabel hasil pengujian motor induksi dengan
penambahan inverter (30hz) ... 33 Tabel 4.3 Tabel hasil pengujian motor induksi dengan
penambahan inverter (40hz) ... 33 Tabel 4.4 Tabel hasil pengujian motor induksi dengan
penambahan inverter (50hz) ... 34 Tabel 4.5 Data hasil perhitungan motor induksi tanpa
penambahan inverter (50hz) ... 36 Tabel 4.6 Data hasil perhitungan motor induksi dengan
penambahan inverter (30hz) ... 40 Tabel 4.7 Data hasil perhitungan motor induksi dengan
penambahan inverter (40hz) ... 43 Tabel 4.8 Data hasil perhitungan motor induksi dengan
penambahan inverter (50hz) ... 47
BAB I
PENDAHULUAN
1.1. Latar Belakang
Pada umumnya, mesin induksi banyak digunakan dibidang industri, salah satunya motor induksi tiga fasa. Mesin induksi biasanya di pakai sebagai penggerak dalam mesin-mesin industri, mesin mekanik, ataupun proyek,misalnya untuk blower penghisap debu, kipas untuk boiler, pompa pembuangan, dan lain- lainnya. Hal ini dikarenakan motor induksi memiliki beberapa keunggulan dari jenis motor lain, yaitu efisiensi yang relatif tinggi, konstruksi sederhana dan kuat, serta mudah dan murah dalam perawatannya. Akan tetapi motor jenis inipun punya kekurangan, yaitu susah dalam mengatur kecepatan putarannya.
Untuk mengatur putarannya, dapat dilakukan dengan mengubah jumlah kutub atau dengan mengatur frekuensi tegangan masukan pada motor tersebut.
Pengaturan kecepatan dengan mengubah jumlah kutub hanya dapat mengahasilkan variasi kecepatan yang sedikit dan tidak praktis. Sedangkan pengaturan kecepatan dengan mengatur frekuensi dapat dilakukan dengan suatu alat elektronika yaitu dengan menggunakan inverter. Dengan cara ini, maka dapat menghasilkan perubahan perubahan kecepatan dengan rentang waktu yang lebar, perubahan kecepatan yang halus, serta lebih praktis dalam pengoperasiannya.
Penelitian ini nantinya akan difokuskan pada pembahasan mengenai pengaruh inverter saat digunakan sebagai pengatur frekuensi terhadap kinerja motor induksi tiga fasa rotor belitan. Adapun kinerja yang akan diamati adalah arus,slip,faktor daya,dan efisiensi.
1.2. Perumusan Masalah
Adapun rumusan masalah dalam tugas akhir ini adalah:
1. Bagaimana kinerja motor induksi 3 fasa ketika dijalankan / dioperasikan tanpa menggunakan inverter.
2. Bagaimana kinerja motor induksi 3 fasa ketika dijalankan / dioperasikan menggunakan inverter.
1.3. Tujuan
Adapun tujuan dari penulisan tugas akhir ini adalah sebagai berikut:
1. Mengetahui pengaruh penggunaan inverter terhadap arus, tegangan, faktor daya, dan kecepatan putaran motor induksi.
2. Mengetahui efisiensi motor induksi 3 fasa yang dicatu dengan inverter.
1.4. Batasan Masalah
Pembatasan masalah yang dilakukan dalam penulisan Tugas Akhir ini adalah sebagai berikut:
1. Motor induksi yang digunakan adalah motor induksi 3 fasa.
2. Inverter yang digunakan dalam percobaan adalah inverter dengan jenis pengontrolan frekuensi.
3. Tidak membahas secara mendalam mengenai inverter 4. Tidak membahas arus start motor.
5. Tidak membahas gangguan pada motor induksi.
6. Pengukuran dilakukan pada steady state.
1.5. Manfaat
Adapun manfaat penelitian yang dilakukan ini adalah untuk dapat mengetahui pengaruh penggunaan inverter terhadap motor induksi induksi 3 fasa rotor belitan, mendapatkan efisiensi,slip dan keadaan motor induksi.
BAB II
TINJAUAN PUSTAKA
2.1. Motor Induksi
Motor induksi merupakan motor arus bolak – balik yang paling luas digunakan. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator. Belitan stator yang dihubungkan dengan sumber tegangan tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron ( ns = 120f / P ). Medan putar pada stator tersebut akan memotong konduktor – konduktor pada rotor, sehingga terinduksi arus sesuai hukum lentz. Rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putaran relatif antara stator dengan rotor disebut slip.
Bertambahnya beban akan memperbesar kopel motor, yang oleh karenanya akan memperbesar pula arus induksi pada rotor. Sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi bila beban bertambah, putaran rotor cenderung menurun.
Motor induksi sangat banyak digunakan dalam kehidupan sehari- hari baik itu dalam industri maupun rumah tangga.Untuk kebutuhan dalam industri biasanya digunakan motor induksi tiga fasa dengan kapasitas besar. Untuk penggunaan dalam rumah tangga motor induksi satu fasa merupakan motor yang umum digunakan.
2.1.1. konstruksi motor induksi
Konstruksi motor induksi terdiri dari 3 bagian utama, yaitu:
1. Stator: Merupakan bagian yang diam dan mempunyai kumparan medan yang berfungsi untuk menginduksikan medan elektromagnetik ke kumparan rotornya.
2. Celah udara: Merupakan media berpindahnya medan elektromagnetik dari stator ke rotor.
3. Rotor: Merupakan bagian yang bergerak dari motor. Dalam penggunaan motor induksi daya keluaran motor induksi akan ditransfer ke beban melalui rotor.
Gambar 2.1 Penampang stator dan rotor motor induksi tiga fasa
Konstruksi motor induksi pada dasarnya terdiri dari bagian – bagian berikut:
1. Rumah stator (rangka stator) terbuat dari besi tuang.
2. Inti stator terbuat dari besi lunak atau baja silikon.
3. Alur, terbuat dari bahan yang sama dengan inti stator, alur ini merupakan tempat meletakkan belitan (kumparan stator).
4. Belitan (kumparan) stator terbuat dari tembaga.
Rangka stator motor induksi didesain sedemikian rupa dengan tujuan yaitu:
1. Menutupi kumparan dan inti
2. Melindungi bagian mesin yang bergerak dari kontak langsung dengan manusia dan gangguan dari udara terbuka.
3. Meyalurkan torsi ke bagian peralatan pendukung mesin, oleh karena itu stator didesin untuk tahan terhadap gaya putaran dan goncangan.
4. Berguna sebagai sarana ventilasi sehingga pendinginan lebih efektif.
Ditinjau dari rotornya, motor induksi dibagi 2 yaitu motor induksi rotor sangkar tupai dan motor induksi rotor belitan. Motor induksi sangkar tupai mempunyai kecepatan putar dan torsi yang konstan atau sulit diatur, sedangkan motor induksi rotor belitan mempunyai kecepatan putar dan torsi yang dapat diatur.
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa. Belitan tiga fasa pada rotor belitan biasanya tehubung Y, dan masing-masing ujung dari tiga kawat belitan fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor. Belitan-belitan rotor ini kemudian dihubung singkatkan melalui sikat yang menempel pada slip ring.
(a) (b)
Gambar 2.2 (a) Tampilan slip ring rotor belitan, (b) Motor induksi tiga fasa rotor belitan
Rotor sangkar mempunyai kumparan yang terdiri atas beberapa batang konduktor yang disusun sedemikian rupa sehingga menyerupai sangkar tupai.
Rotor terdiri dari tumpukan lempengan besi tipis yang dilaminasi batang konduktor yang mengitarinya. Alumunium (sebagai batang konduktor) dimasukkan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat menggunakan cincin hubung singkat.
(a) (b)
Gambar 2.3 (a) Motor induksi tiga fasa rotor sangkar tupai, (b) Rotor sangkar tupai dan bagian–bagiannya
Konstruksi rotor motor induksi terdiri dari bagian – bagian sebagai berikut:
1. Inti rotor, terbuat besi lunak atau baja silikon.
2. Alur, terbuat dari besi lunak atau baja silikon sama dengan inti. Alur merupakan tempat meletakkan belitan kumparan rotor.
3. Belitan rotor, terbuat dari tembaga.
4. Poros atau as, sebagai penghubung rotor dengan beban.
Diantara stator dan rotor terdapat celah udara yang merupakan ruangan antara stator dan rotor. Pada celah udara ini lewat fluks induksi stator yang memotong kumparan rotor sehingga menyebabkan rotor berputar. Celah udara yang terdapat diantara stator dan rotor diatur sedemikian rupa sehingga didapatkan hasil kerja motor yang optimum. Celah udara yang terlalu besar akan mengakibatkan efisiensi motor menjadi rendah, sebaliknya jika celah udara terlalu kecil akan menimbulkan kesukaran mekanis dan besar kemungkinan akan terjadi gesekan antara rotor dan stator.
2.1.2. Prinsip kerja motor induksi
Motor induksi merupakan motor yang bekerja berdasarkan induksi elektromagnetik. Apabila sumber tegangan 3-fasa dipasang pada kumparan stator maka akan timbul medan putar dengan kecepatan ns = 120 f/p. Medan putar tersebut akan memotong batang konduktor pada rotor sehingga dihasilkan tegangan induksi pada kumparan rotor. Karena kumparan rotor merupakan rangkaian tertutup , maka tegangan induksi (E) akan menghasilkan arus (I).
Adanya arus (I) di dalam medan magnet akan menimbulkan gaya (F) pada rotor.Bila kopel mula yang dihasilkan oleh gaya (F) pada rotor cukup besar untuk
menggerakan rotor, maka rotor akan berputar searah dengan medan putar stator.
Tegangan induksi timbul akibat terpotongnya batang konduktor pada rotor oleh medan putar stator. Artinya agar tegangan terinduksi diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan berputar rotor (nr). Perbedaan kecepatan antara nr dan ns disebut slip (S) dinyatakan dengan S=(ns – nr)/ ns x 100 %.
2.1.3. Slip
Berubah–ubahnya kecepatan motor induksi (nr) mengakibatkan berubahnya harga slip dari 100 % pada saat start sampai 0 % pada saat motor diam (nr = ns ). Hubungan frekuensi dengan slip dapat dilihat sebagai berikut:
Bila f1 = frekuensi jala – jala,
n
s=
120 f1p atau
f
1=
pns120
pada rotor berlaku hubungan :
f
2=
p(ns−nr)120 ... 2.1
f
2=
pns120
x
ns−nrns ... 2.2 Karena
S =
ns−nrns ... 2.3
f
1=
pns120 ... 2.4 Makaf2 = f1× S
Pada saat start: S = 100 %; f2 = f1
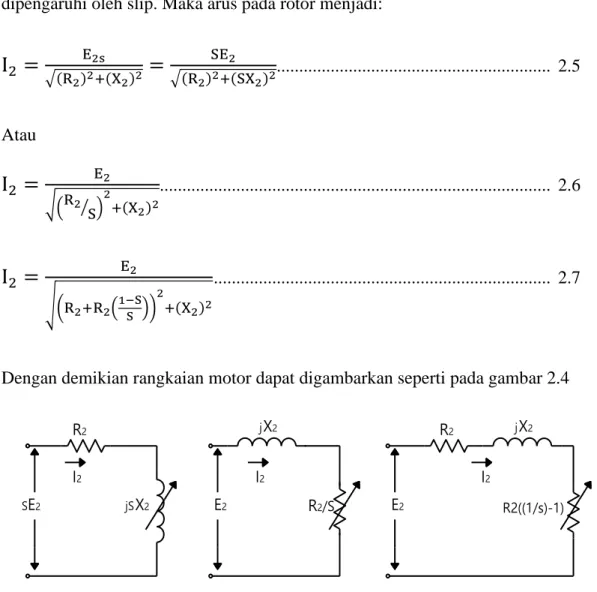
2.1.4. Rangkaian ekivalen motor induksi
Motor induksi 3-fasa mempunyai kumparan stator dan kumparan rotor.
Pada saat rotor berputar tegangan induksi rotor (E2) dan reaktansi motor (X2) turut dipengaruhi oleh slip. Maka arus pada rotor menjadi:
I
2=
E2s√(R2)2+(X2)2
=
SE2√(R2)2+(SX2)2... 2.5
Atau
I
2=
E2√(R2⁄ )S 2+(X2)2
... 2.6
I
2=
E2√(R2+R2(1−SS )) 2
+(X2)2
... 2.7
Dengan demikian rangkaian motor dapat digambarkan seperti pada gambar 2.4
R2
I2
jSX2 SE2
I2
E2 jX2
R2/S
I2
E2
jX2
R2((1/s)-1) R2
(i) (ii) (iii)
Gambar 2.4Rangkaian ekivalen rotor Per-fasa
(i) Menyatakan persamaan 2.5 (ii) Menyatakan persamaan 2.6
(iii) Menyatakan persamaan 2.7
Dari rangkaian rotor pada gambar 2.4, perhatikan bahwa:
I22R2= daya yang hilang berupa panas
I22R2(1−S
S )= daya keluar motor yang diubah menjadi daya mekanik
Kerja motor induksi hampir sama dengan prinsip kerja transformator yaitu berdasarkan prinsip induksi – elektromagnetik. Oleh karena itu sebuah motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder yang berputar. Secara utuh rangkaian ekivalen motor induksi dapat digambarkan seperti pada gambar 2.5.
Gambar 2.5Rangkaian ekivalen per-fasa motor induksi dengan bagian rangkaian rotor dinyatakan terhadap sisi stator
2.1.5. Daya dan rugi-rugi motor induksi
Motor induksi memiliki rugi-rugi daya karena didalam motor induksi terdapat komponen resistor dan induktor. Komponen ini terdapat pada belitan stator dan belitan rotor. Rugi-rudi pada motor induksi ini adalah rugi-rugi
tembaga, rugi inti, dan rugi akibat gesekan dan hambatan angin. Dengan memperhatikan model rangkaian diketahui bahwa daya masuk stator:
P1 = 3 V1 I1cos ∅ ... 2.8
Daya yang masuk ke rotor (terdapat celah udara) P2 = 3 E1 I2′ cos ∅
P2 = 3(I2′)2 a2[R2+ R2(1 − S S )]
P2 = 3 (I2′)2a2(R2
S) ... 2.9 Daya keluar rotor (daya mekanik pada rotor termasuk rugi geser dan angin)
Pm = 3(I2′)2a2R2(1−S
S ) ... 2.10 Rugi tembaga rotor:PCu = 3 (I2′)2 a2R2 ... 2.11 Bila dibuat perbandingan antara ketiga daya tersebut, dengan asumsi rugi- rugi putar diabaikan, maka dapat dapat dibuat perbandingan sebagai berikut:
P2 ∶ Pm ∶ PCu = 1 ∶ (1 − s) ∶ s ... 2.12 Dengan demikian diperoleh cara menghitung yang lebih cepat. Daya keluar motor dapat juga diperoleh dari daya masuk rotor dikurangi rugi tembaga rotor.
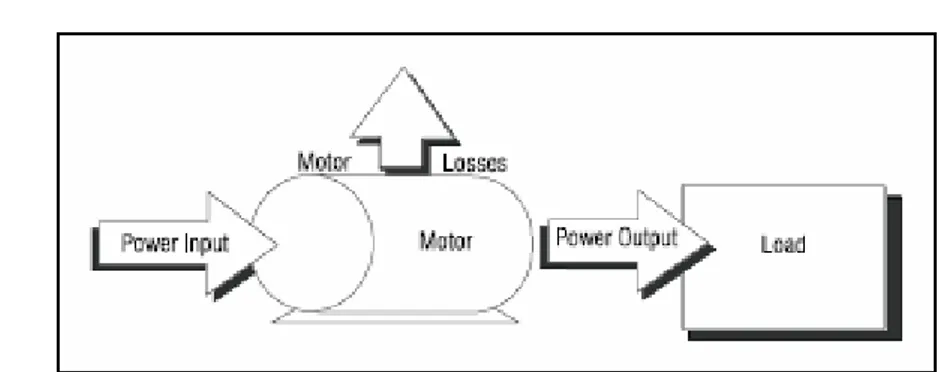
2.1.6. Efisiensi Motor Induksi
Efisiensi motor induksi dapat didefenisikan sebagai perbandingan daya keluaran motor terhadap daya masukan motor. Secara matematis efisiensi motor induksi dapat dirumuskan pada Persamaan 2.13 dan digambarkan pada Gambar
n =POUT
PIN × 100% ... 2.13
Gambar 2.6 Kehilangan daya pada motor
Efesiensi motor induksi dipengaruhi oleh beberapa faktor, yaitu:
• Usia. Motor baru lebih efisien
• Kapasitas. Sebagaimana pada hampir kebanyakan peralatan, efisiensi motor meningkat dengan laju kapasitasnya.
• Kecepatan. Motor dengan kecepatan yang lebih tinggi biasanya lebih efisien.
• Jenis motor. Sebagai contoh, motor sangkar tupai biasanya lebih efisien daripada motor belitan (cincin geser).
• Suhu. Motor yang didinginkan oleh fan dan tertutup total lebih efisien daripada motor tanpa pendingin.
• Penggulungan ulang motor dapat mengakibatkan penurunan efisiensi.
Kinerja motor dipengaruhi oleh kualitas daya yang masuk, yang ditentukan oleh tegangan dan frekuensi aktual dibandingkan dengan dengan nilai dasar. Fluktuasi dalam tegangan dan frekuensi yang lebih besar daripada nilai yang diterima memiliki dampak yang merugi pada kinerja motor.
Ketidakseimbangan tegangan bahkan dapat lebih merugikan terhadap kinerja
motor dan terjadi apabila tegangan tiga fasa dari motor tiga fasa tidak sama. Hal ini disebabkan oleh perbedaan pasokan tegangan untuk setiap fase dari tiga fase.
Dapat juga diakibatkan dari penggunaan kabel dengan ukuran yang berbeda pada sistem distribusinya. Contoh dari pengaruh ketidakseimbangan tegangan pada kinerja motor ditunjukkan pada pada tabel 2.1.
Tabel 2.1Pengaruh ketidakseimbangan tegangan dalam motor induksi (BEE India, 2004)
Persentase ketidakseimbangan tegangan 0.30 2.30 5.40
Ketidakseimbangan arus (%) 0.40 17.70 40.0
Kenaikan suhu (oC) 0 30 40
Tegangan masing-masing fase pada sistem tiga fase besarnya harus sama, simetris, dan dipisahkan oleh sudut 120o. keseimbangan fase harus 1% untuk menghindarkan penurunan daya pada motor dan gagalnya garansi pabrik pembuatnya. Beberapa faktor dapat mempengaruhi kesetimbangan tegangan:
beban fasa tunggal pada setiap fase, ukuran kabel yang berbeda, atau kegagalan sirkuit. Ketidakseimbangan sistem meningkatkan kehilangan pada sistem distribusi dan menurunkan efisiensi motor.Faktor lain yang mempengaruhi kinerja motor induksi yaitu perubahan besar tegangan dan frekuensi sumber. Menurut NEMA.
• Penambahan tegangan sebesar 10% dari tegangan nominal pada nameplate motor akan mengakibatkan peningkatan tempeatur motor pada beban nominal motor. Jika pengoperasian motor berlangsung lama akan mempercepat rusaknya isolasi dari motor.
• Frekuensi yang lebih tinggi dari frekuensi nominal motor biasanya akan meningkatkan power factor tetapi mengurangi torsi motor, meningkatkan kecepatan motor, dan gesekan.
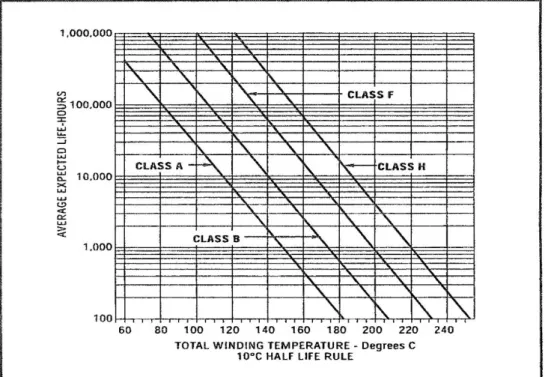
Karena perubahan frekuensi dan tegangan berperan dalam meningkatkan suhu motor pada beban normal, maka frekuensi dan tegangan juga akan mempengaruhi umur isolasi motor, dan umur pelumas bearing pada rotor dapat dilihat pada Gambar 2.7.
Gambar 2.7Grafik suhu vs umur isolasi (per IEEE 117 & 101)
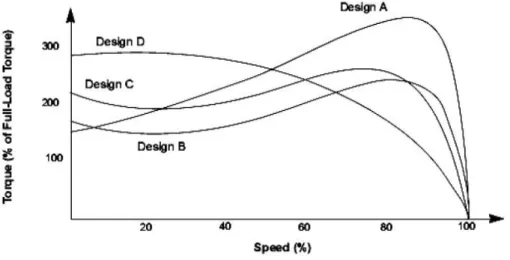
2.1.7. Desain Motor Induksi Tiga Fasa
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat dilihat pada Gambar 2.8
Gambar 2.8Grafik kecepatan vs torsi
• Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani beban lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
• Kelas B : merupakan disain yang paling sering dijumpai di pasaran. Motor ini memiliki torsi start yang normal seperti halnya disain kelas A, akan tetapi motor ini memberikan arus start yang rendah. Torsi locked rotor cukup baik untuk menstart berbagai beban yang dijumpai dalam aplikasi industri. Slip motor ini < =5 %. Effisiensi dan faktor dayanya pada saat berbeban penuh tinggi sehingga disain ini merupakan yang paling populer.
Aplikasinya dapat dijumpai pada pompa, kipas angin/ fan, dan peralatan – peralatan mesin.
• Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari dua disain yang sebelumnya. Aplikasinya dijumpai pada beban – beban seperti Universitas Sumatera Utara
• konveyor, mesin penghancur (crusher ), komperessor,dll. Operasi dari motor ini mendekati kecepatan penuh tanpa overload dalam jumlah besar.
Arus startnya rendah, slipnya < = 5 %
• Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan beban penuhnya rendah. Memiliki nilai slip yang tinggi ( 5-13 % ), sehingga motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan kecepatan secara mendadak pada motor. Contoh aplikasinya : elevator, crane, dan ekstraktor.
2.2. Pengaturan putaran motor induksi
Motor induksi pada umumnya berputar dengan kecepatan konstan, mendekati kecepatan sinkronnya. Namun untuk penggunaan tertentu diperlukan suatu pengaturan agar kecepatan motor induksi dapat diubah-ubah sesuai dengan kebutuhan. Pengaturan motor induksi memerlukan biaya yang agak tinggi.
Biasanya pengaturan ini dapat dilakukan dengan beberapa cara yaitu dengan mengubah jumlah kutub motor, mengubah frekuensi jala-jala, mengatur tegangan jala-jala, dan mengatur tahanan luar.
2.2.1. Mengubah Jumlah Kutub Motor
Karena ns = 120f p⁄ , maka perubahan kutub (p) atau frekuensi (f) akan mempengaruhi putaran rotor. Jumlah kutub dapat diubah dengan merencanakan
kumparan stator sedemikian rupa sehingga dapat menerima tegangan masuk pada posisi kumparan yang berbeda-beda. Biasanya diperoleh dua perubahan kecepatan sinkron dengan mengubah kutub dari 2 menjadi 4.
2.2.2. Mengubah Frekuensi Jala-jala
Pengaturan putaran motor induksi dapat dilakukan dengan mengubah nilai frekuensi tegangan. Hanya saja untuk menjaga keseimbangan kerapatan fluks, perubahan tegangan harus dilakukan bersamaan dengan perubahan nilai frekuensi.
Pengaturan frekuensi ini dapat dilakukan dengan menggunakan inverter.
Tegangan searah yang masuk ke inverter akan diubah menjadi tegangan bolak- balik. Dengan mempercepat atau memperlambat periode pulsa yang memacu thyristor, frekuensi dan kecepatan motor dapat diatur.
2.2.3. Mengatur Tegangan Jala-jala
Dari persammaan kopel motor induksi τ~V2 diketahui bahwa kopel sebanding dengan pangkat dua tegangan yang diberikan. Salah satu pengaturan tegangan adalh dengan menggunakan thyristor. Penyalaan thyristor dilakukan dengan perbedaan sudut fasa 120. Dengan mengatur sudut penyalaan terhadap perpotongan sumbu nol sedemikian rupa akan diperoleh pengaturan antara 0 < V
< Vmaks.
2.2.4. Pengaturan Tahanan Luar
Tahanan luar dari motor induksi rotor belitan dapat diatur, hal ini memungkinkan dilakukan karena pada motor induksi rotor belitan terdapat slip ring. Melalui slip ring ini tahanan luar dihubungkan dengan tahan rotor. dengan demikian dihasilkan karakteristik kopel kecepatan yang berbeda-beda.
2.3.Inverter
Inverter adalah suatu rangkaian yang berfungsi untuk mengubah tegangan masukan arus searah (DC) menjadi tegangan keluaran arus bolak-balik (AC).
Tegangan dan frekuensi dapat diatur sesuai yang diinginkan. Pengaturan tegangan inverter yang umum digunakan adalah dengan metode Modulasi Lebar Pulsa (Pulse Width Modulation). Inverter yang diatur dengan metode ini selanjutnya disebut dengan inverter PWM.
Inverter DC-AC sudah banyak digunakan dalam aplikasi industri seperti uninterruptible power supply (UPS), AC motor drives. Belakangan ini inverter juga berperan penting dalam berbagai jenis energi terbarukan yang digunakan sebagai penghubung energi angin dan energi surya ke grid. PWM sangat berkembang dan teknik yang sangat berguna dimana dengan teknik ini pulsa gate dari transistor dicontrol dengan berbagai mekanisme. Inverter biasa mempunyai tegangan output yang berubah sesuai dengan perubahan beban, dengan menggunakan inverter PWM hal ini dapat diperbaiki dengan mengubah lebar pulsa. Keluaran AC bergantung kepada frekuensi pensaklaran dan lebar pulsa.
Ada dua jenis inverter yang umum digunakan pada sistem tenaga listrik, yaitu:
1. Inverter dengan frekuensi dan tegangan keluar yang konstan CVCF (Constant Voltage Constant Frequency)
2. Inverter dengan frekuensi dan tegangan berubah-ubah. Umumnya inverter dengan frekuensi dan tegangan keluaran yang berubah-ubah digunakan untuk pemakaian khusus, seperti pemakaian pada pompa listrik 3 fasa
dengan menggunakan sumber DC. Inverter Variable SpeedDrive (VSD) termasuk pada jenis inverter dengan frekuensi dan tegangan berubah.
Dipasaran baik itu inverter tegangan dan frekuensi konstan maupun inverter tegangan dan frekuensi variabel terdiri dari inverter satu fasa dan tiga fasa. Untuk penggunaan dalam rumah tangga yang berkapasitas kecil biasanya menggunakan inverter satu fasa. Untuk penggunaan di industri dan untuk keperluan interkoneksi Pusat Listrik Tenaga Surya (PLTS) dengan jaringan digunakan inverter tiga fasa.
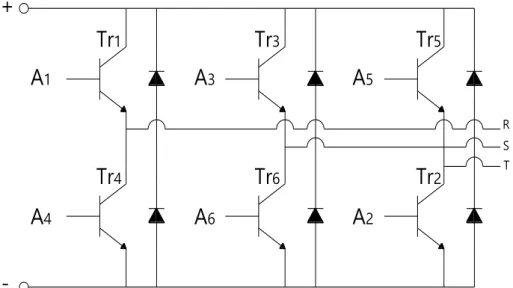
2.4. Pembentukan Gelombang AC Pada Inverter
Pembentukan gelombang AC pada Inverter menggunakan saklar Transistor seperti gambar 2.9.
R S T
A
1A
4A
3A
6A
5A
2T
r1T
r4T
r3T
r6T
r5T
r2+
-
Gambar 2.9 Inverter dengan saklar Transistor
Prinsip dasar dari inverter 3-fasa dengan menggunakan switching transistorPengaturan on-off transistor Tr1 sampai dengan Tr6 dilakukan oleh pulsa-
sedemikian rupa sehingga urutannya mulai dari A1, A2, A3, A4, A5,dan terakhir A6
dengan referensi gambar diatas.
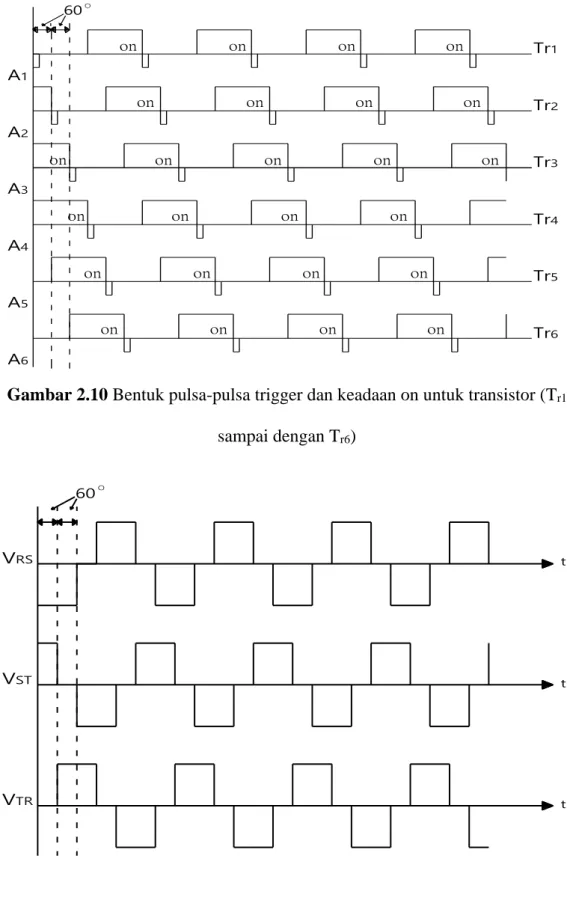
Perbedaan periode A1 ke A2, A2 ke A3, dan seterusnya adalah 60 derajat elektris, sedangkan periode pada tiap-tiap pulsa itu sendiri (pulsa A1 yang pertama ke pulsa A1 yang kedua) sebesar 360 derajat elektris. Selain itu waktu kontak (on) untuk tiap transistor diatur sedemikian rupa yaitu sebesar 180 derajat elektris.
Bentuk pulsa-pulsa A1 sampai A6 dan kondisi on-off Tr1 sampai Tr6 dapat dilihat pada gambar 2.9.
Penjelasan terjadinya gelombang di titik R, S, T adalah sebagai berikut:Pada siklus 0 derajat sampai 60 derajat, Tr2, Tr3, dan Tr4 on dan yang lainnya off. Pada keadaan ini tegangan di titik R = 0, di titik S = Vdc, di titik T = 0.
Demikian pula pada siklus 60 derajat sampai 120 derajat, disini Tr3, Tr4, Tr5 on dan yang lainya off. Hali ini akan menimbulkan tegangan di titik R = 0, di titik S
= Vdc, dititik T = Vdc. Tegangan antar fasa dari keluaran inverter adalah perbedaan tegangan antara kaki-kaki dari inverter yang dapat dirumuskan sebagai berikut:
Vrs = Vr− Vs Vst = Vs− Vt Vtr = Vt− Vr
Bentuk Vrs, Vst, dan Vtr dapat dilihat pada gambar. Pada gambar tersebut terlihat bahwa hasil output tegangan Vrs, Vts, dan Vtr, belum berbentuk sinus murni meskipun sudah tampak merupakan tegangan AC 3-fasa. Bentuk pulsa trigger dalam keadaan ON untuk transistor (Tr1 sampai dengan Tr6) dan bentuk tegangan output yang terjadi (VRS, VST, VTR) dilihat pada Gambar 2.10 dan Gambar 2.11.
Tr1
A3
A4
A5
A6
A1
A2
60o
on on on on
on on on on
on on on on
on on on
on on on on
on on on on
on on
Tr2
Tr3
Tr4
Tr5
Tr6
Gambar 2.10 Bentuk pulsa-pulsa trigger dan keadaan on untuk transistor (Tr1
sampai dengan Tr6)
60o
VRS
VST
VTR
t
t
t
Gambar 2.11 Bentuk tegangan output yang terjadi (VRS, VST, VTR)
BAB III
METODE PENELITIAN
3.1. Tempat dan Waktu
Penelitian akan dilaksanakan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK). Penelitian akan dilaksanakan setelah selesai seminar proposal telah disetujui. Lama penelitian direncanakan selama 2 (dua) bulan.
3.2. Bahan dan Peralatan
Bahan yang digunakan untuk melakukan penelitian ini adalah:
1. Motor induksi tiga fasa Spesifikasi:
- Rotor Belitan - 1 kW
- ∆ / Y 220/380 V, 5.3/3.2 A - 1410 min-1, 50 Hz
- Cos θ 0.71
2. Inverter Variabletiga fasa.
Spesifikasi:
- Altivar 71
- 200 / 240 V, 5.5 kW 3. Power Supply Electric Machine 4. Power Switch
5. Servo Machine Test System
6. Servo
7. Kabel Penghubung
3.3. Variabel yang diamati
Variabel yang diamati dalam penelitian adalah:
a) Tegangan b) Arus c) Factor daya d) Kecepataan motor
3.4. Prosedur Penelitian
Penelitian akan dilakukan untuk mendapatkan nilai tegangan, arus, putaran dan faktor daya pada motor induksi yang disuplai dengan inverter maupun tanpa inverter.Percoban akan dilakukan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK). Pada penelitian ini, ada beberapa percobaan yang akan dilakukan, adapun prosedur pengambilan data dalam setiap percobaan adalah sebagai berikut:
3.4.1. Percobaan Motor Induksi 3 Fasa disuplai tanpa inverter
Percobaan motor induksi tiga fasa di suplai tanpa inverter dirangkai seperti pada Gambar 3.4
POWER SUPPLY ELECTRIC MACHINE
POWER SWITCH THREE PHASE METER
SERVO MACHINE TEST SYSTEM
1 ON
OFF
Nm
MODE
TORQUE CONTROL
Rpm
RUN OFF
MOTOR INDUKSI 3 FASA (BELITAN)
SERVO M
R S
LINE
K L M
Gambar 3.4 Rangkaian percobaan motor induksi tiga fasa disupplaitanpa inverter
- Prosedur Percobaan
1. Motor induksi tiga fasa dikopel dengan Servo, kemudian rangkaian percobaan dirangkai seperti gambar 3.1.
2. Seluruh switch dalam keadaan terbuka.
3. Saklar pada Power Supply Electric Machine ditutup, kemudian motor dijalankan dengan menekan tombol ON pada Power Switch..
4. Motor dijalankan dengan beban (torsi) bervariasi. Dalam percobaan ini beban yang dipilih adalah (0 Nm, 1 Nm, 2 Nm, 3 , 4, 5 Nm).
5. Untuk mengatur beban, tombol RUN ditekan dan selector pada Servo Machine Test System diputar hingga alat ukur torsi menunjukkan beban yang diinginkan (0-5Nm).
6. Dicatat data hasil percobaan (tegangan, arus, faktor daya) yang ditampilkan pada Three Phase Meter untuk masing-masing beban yang dipilih (0-5Nm).
7. Dicatat putaran motor yang ditampilkan pada Servo Machine Test System untuk masing-masing beban yang dipilih (0-5Nm).
8. Percobaan selesai,ditekan tombol STOP pada Servo Machine Test System dan semua saklar dibuka.
3.4.2. Percobaan motor induksi 3-fasa disuplai dengan inverter
Percobaan motor induksi tiga fasa disuplai dengan inverter dirangkai seperti pada Gambar 3.4.
POWER SUPPLY ELECTRIC MACHINE
POWER SWITCH THREE PHASE
METER
SERVO MACHINE TEST SYSTEM
ON OFF
Nm
MODE TORQUE CONTROL
Rpm
RUN OFF
MOTOR INDUKSI 3 FASA (BELITAN)
SERVO M
0 1
RUN
INVERTER VSD 3 FASA S
T
LINE
K L M
- Prosedur Percobaan
1. Motor induksi tiga fasa dikopel dengan Servo, stator motor dihubungkan dengan hubungan DELTA (Δ). kemudian rangkaian percobaan dirangkai seperti gambar 3.2.
2. Seluruh switch dalam keadaan terbuka.
3. Saklar pada Power Supply Electric Machine ditutup, kemudian ditekan ON pada Power Switch.
4. Diatur frekuensi keluaran inverter variable speed drive dengan memutar selector pada Inverter. Dalam percobaan ini frekuensi yang dipilih adalah 30, 40, 50 Hz.
5. Diatur frekuensi inverterpada frekuensi 30 Hz, ditekan tombol RUN pada inverter variable speed drive untuk menjalankan motor.
6. Motor dijalankan dengan beban (beban) bervariasi. Dalam percobaan ini beban yang dipilih adalah (0 Nm, 1 Nm, 2 Nm, 3 Nm, 4 Nm, 5 Nm).
7. Untuk mengatur beban,ditekan tombol RUN dan diputar selector pada Servo Machine Test System hingga alat ukur torsi menunjukkan beban yang diinginkan (0 - 5Nm).
8. Dicatat data hasil percobaan (tegangan, arus, faktor daya) yang ditampilkan pada Three Phase Meter untuk masing-masing beban yang dipilih (0 – 5 Nm).
9. Dicatat putaran motor yang ditampilkan pada Servo Machine Test System untuk masing-masing beban yang dipilih (0-5Nm).
10. langkah 4 sampai langkah 9 diulangi dengan dengan mengubah nilai frekuensi keluaran inverter. Diatur frekuensi sesuai dengan nilai frekuensi yang telah dipilih pada langkah 4.
11. Percobaan selesai, ditekan tombol STOP pada Servo Machine Test System dan buka semua saklar.
3.5. Pelaksanaan Penelitian 3.5.1 Proses Pengumpulan Data
Adapun proses pengambilan data ditunjukkan oleh diagram alur pada Gambar 3.6 dan Gambar 3.7
Mulai
selesai Merangkai peralatan
Menaikkan beban 1 Nm
Pengamatan alat ukur
Beban mencapai 5 Nm ? Mencatat data hasil
pengamatan
Ya
Tidak
Mulai
Merangkai alat
Beri frekuensi 30hz
Catat nilai pada alat ukur
Beban mencapai 5
Nm ?
selesai menaikkan beban
1 Nm
Frekuensi mencapai 50
hz ?
Tidak
Naikkan frekuensi 10hz
tidak Ya
Ya
Gambar 3.7 diagram alir pengambilan data (dengan inverter)
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
4.1 Umum
Pada umumnya, mesin induksi banyak digunakan dibidang industri, salah satunya motor induksi tiga fasa. Mesin induksi biasanya di pakai sebagai penggerak dalam mesin-mesin industri, mesin mekanik, ataupun proyek,misalnya untuk blower penghisap debu, kipas untuk boiler, pompa pembuangan, dan lain- lainnya. Hal ini dikarenakan motor induksi memiliki beberapa keunggulan dari jenis motor lain, yaitu efisiensi yang relatif tinggi, konstruksi sederhana dan kuat, serta mudah dan murah dalam perawatannya. Akan tetapi motor jenis inipun punya kekurangan, yaitu susah dalam mengatur kecepatan putarannya
Dalam penggunaannya motor induksi harus dapat diatur sesuai dengan kebutuhan. Untuk kebutuhan tertentu adakalanya dibutuhkan kecepatan motor yang berubah-ubah. Untuk mengubah kecepatan motor ada beberapa cara yang dapat dilakukan, diantaranya adalah:mengubah jumlah kutub dan mengatur frekuensi tegangan masukan. Pengaturan kecepatan putaran dengan mengubah jumlah kutub hanya menghasilkan variasi kecepatan yang sedikit dan tidak praktis. Sedangkan pengaturan kecepatan dengan mengatur frekuensi dilakukan dengan suatu alat elektronika yaitu inveerter. Dengan cara ini dapat menghasilkan perubahan kecepatan dengan rentang waktu yang lebar, perubahan kecepatan yang halus dan tanggapan pengaturan yang tepat.Dengan mempertimbangkan dua jenis pengaturan diatas, maka pengaturan motor yang paling umum dilakukan adalah dengan mengubah frekuensi.
Dalam bab ini akan dibahas pengaruh penambahan inverterterhadap kinerja motor induksi tiga fasa rotor belitan. Kinerja motor induksi yang menggunakan inverterakan dibandingkan dengan kinerja motor tanpa penambahan inverter atau yang di suplai langsung dari sumber (PLN).
4.2. Data Percobaan
Dari hasil penelitian yang dilakukan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK) diperoleh data pengujian sebagai berikut:
4.2.1. Percobaan Motor Induksi 3 fasarotor belitan tanpa penambahan inverter
Dari pengujian yang dilakukan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK), Tegangan fasa-fasa (VL-L) dari jala-jala sama dengan tegangan jaringan distribusi sekunder PLN, yaitu 380 volt pada frekuensi 50 Hz.
Oleh karenanya belitan stator motor dihubungkan WYE (Y). dengan menjalankan motor induksi 3 fasa dengan suplai tegangan motor langsung dari jala-jala dengan frekuensi 50 Hz (PLN), didapatkan data sebagai berikut:
- Frekuensi : 50 Hz
- V L-L (tegangan fasa-fasa distribusi sekunder PLN): 380 V - Hubungan belitan stator motor : Y (WYE)
Tabel 4.1. Data hasil pengujian motor induksi tanpa penambahan inverter (frekuensi 50 Hz)
Beban (Nm)
Tegangan (Volt)
Arus (Ampere)
Cos Phi Putaran (nr) (Rpm)
0 380 2.30 0.10 1498
1 380 2.33 0.30 1486
2 380 2.41 0.40 1476
3 380 2.48 0.49 1464
4 380 2.65 0.60 1446
5 380 2.86 0.68 1431
4.2.3. Percobaan Motor Induksi 3 Fasa rotor belitan dengan penambahan Inverter
Dari pengujian yang dilakukan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK), Tegangan fasa-fasa (VL-L) dari inverter variable speed drive yang digunakan pada pengujian ini adalah 220 volt pada frekuensi 50 Hz. Oleh karenanya belitan stator motor dihubungkan delta (∆).
dengan menjalankan motor induksi 3 fasa dengan suplai dari Inverter Variable Speed Drive (VSD) 3 fasa, didapatkan data sebagai berikut:
1. Frekuensi 30 Hz
- Hubungan belitan stator motor : ∆ (DELTA)
Tabel 4.2. Data hasil pengujian motor induksi dengan penambahan Inverter untuk frekuensi 30 Hz
Beban (Nm)
Tegangan (Volt)
Arus (Ampere)
Cos Phi Putaran (nr) (Rpm)
0 158 3.60 0.18 891
1 158 3.74 0.28 881
2 158 3.80 0.35 872
3 158 4.00 0.44 860
4 158 4.20 0.52 840
5 158 4.70 0.60 815
2. Frekuensi 40 Hz
- Hubungan belitan stator motor : ∆ (DELTA)
Tabel 4.3. Data hasil pengujian motor induksi dengan penambahan inverter untuk frekuensi 40 Hz
Beban (NM)
Tegangan (Volt)
Arus (Ampere)
Cos Phi Putaran (nr) (Rpm)
0 182 3.68 0.18 1194
1 182 3.70 0.28 1189
2 182 3.80 0.39 1170
3 182 3.90 0.45 1165
4 182 4.30 0.54 1152
5 182 4.80 0.59 1120
3. Frekuensi 50 Hz
- Hubungan belitan stator motor : ∆ (DELTA)
Tabel 4.4. Data hasil pengujian motor induksi dengan penambahan inverter untuk frekuensi 50 Hz
Beban (NM)
Tegangan (Volt)
Arus (Ampere)
Cos Phi Putaran (nr) (Rpm)
0 218 3.40 0.20 1496
1 218 3.48 0.25 1485
2 218 3.50 0.38 1473
3 218 3.70 0.55 1460
4 218 4.10 0.66 1441
5 218 4.70 0.70 1417
4.3. Analisa Data dan Perhitungan Data
Dari data hasil penelitian yang dilakukan di Laboratorium Motor Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan Bidang Bangun dan Listrik (P4TK), dilakukan analisa data untuk mendapatkan besarnya rugi-rugi dan efisiensi motor induksi 3 fasa. Adapun analisa data yang dihitung adalah sebagai berikut:
4.3.1. Analisa dan Perhitungan slip dan Efisiensi Motor induksi tanpa penambahan inverter
Pada bab ini, dihitung rugi – rugi serta efisiensi motor induksi pada saat motor disuplai dari jala – jala.Analisa data ini bertujuan untuk mendapatkan nilai perbandingan slip dan efesiensi motor induksi saat di operasikan tanpa inverter dengan motor induksi saat di operasikan dengan penambahan inverter. Untuk itu penulis mengambil contoh perhitungan pada beban 1 Nm pada frekuensi50 Hz(tanpa inverter).
Dari percobaan untuk beban 1 Nm pada frekuensi 50 Hz(tanpa inverter), diperoleh data sebagai berikut:
V = 380 volt I = 2.33 Ampere Cos θ = 0.3
nr = 1486 Rpm Kutub (p) = 4
1. Kecepatan medan putar stator (ns)
ns = 120f
p =120 × 50
4 = 1500 Rpm 2. Slip
S = ns− nr
ns =1500 − 1486
1500 = 0.009
3. Daya masuk pada motor (PIn)
PIn = √3 × Vl× Il× cos θ = √3 × 380 × 2.33 × 0.3
= 460.06 Watt
4. Rugi daya inti pada saat tanpa beban (P0)
P0 = √3 × V0 × I0× cos θ = √3 × 380 × 2.3 × 0.1
= 151.38 Watt
5. Daya keluar stator (PoS) = Daya masuk ke rotor (Pin R) PoS= Pin R= PIn− (P0)
= 460.06 − (151.38)
= 308.68 Watt 6. Daya keluar motor (POut)
POut = (1 − slip) × PinR = (1 − 0.009) × 308.68
= 305.9 Watt
7. Efisiensi motor induksi (η)
η =Pout
Pin × 100 %
= 305.9
460.06× 100%
= 66.49 %
Dengan melakukan perhitungan yang sama akan diperoleh slip motor dan efisiensi motor untuk beban 2 Nm, 3 Nm, 4 Nm,5Nm. Adapun hasil perhitungan yang dilakukan disusun dalam tabel 4.5sebagai berikut:
Tabel 4.5Data hasil perhitungan motor induksi tanpa penambahan inverter (frekuensi 50 Hz)
Beban
(Nm)
Vin (V)
Iin
(A) Pf nr
(rpm) slip Pin (W)
Pout
(W) η
0 380 2.30 0.10 1498 0.001 151.38 (P0)
1 380 2.33 0.30 1486 0.009 460.06 305.90 66.49 2 380 2.41 0.40 1476 0.016 638.48 475.37 74.45 3 380 2.48 0.49 1464 0.024 799.81 632.86 79.12 4 380 2.65 0.60 1446 0.036 1046.50 862.89 82.45 5 380 2.86 0.68 1431 0.046 1186.03 987.05 83.22
Untuk mempermudah dalam memahami dan melakukan analisa data hasil perhitungan, maka hasil perhitungan ditampilkan dalam grafik Gambar 4.1 dan
Gambar 4.1 Grafik beban vs kecepatan motor induksi tanpa inverter (50 Hz)
Gambar 4.2 Grafik beban vs efisiensi motor induksi tanpa inverter (50 Hz)
1496
1485
1473
1460
1441
1417
1360 1380 1400 1420 1440 1460 1480 1500 1520
0 1 2 3 4 5
Kecepatan putar (rpm)
Beban (Nm)
Hubungan beban terhadap kecepatan
0,001
0,009
0,016
0,024
0,036
0,046
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05
0 1 2 3 4 5
Slip
Beban (Nm)
Hubungan beban terhadap Slip
4.3.2. Analisa dan Perhitungan slip dan Efisiensi Motor Induksi yang dioperasikan dengan penambahan inverter
Pada bab ini, dihitung slip serta efisiensi motor induksi saat motor dioperasiakan dengan penamabahan inverter.Analisa data dilakukan pada masing- masing frekuensi masukan motor (30, 40, 50 Hz).Analisa data ini bertujuan untuk mendapatkan nilai perbandinganslip dan efesiensi motor saat dipoerasikan tanpa inverter dengan motor saat dioperasikan dengan penambahan inverter.
1. Frekuensi 30 Hz
Dari percobaan, saat motor disuplai dari inverter variable speed drive denganfrekuensi 30 Hz dan diberi beban sebesar 0.5 Nm, diperoleh data sebagai berikut:
V = 158 volt I = 3.74 Ampere Cos θ = 0.28 nr = 881 rpm Kutub (p) = 4
1. Kecepatan medan putar stator (ns)
ns =120f
p =120 × 30
4 = 900 rpm 2. Slip
S = ns− nr
ns =900 − 881
900 = 0.021 3. Daya masuk pada motor (PIn)
PIn= √3 × Vl× Il× cos θ = √3 × 158 × 3.74 × 0.28
= 286.58 Watt
4. Rugi daya inti pada saat tanpa beban (P0)
P0 = √3 × V0 × I0× cos θ = √3 × 158 × 3.6 × 0.18
= 177.33 Watt
5. Daya keluar stator (PoS) = Daya masuk ke rotor (Pin R) PoS= Pin R= PIn− (P0)
= 286.58 − (177.33)
= 109.25 Watt 6. Daya keluar motor (POut)
POut = (1 − slip) × PinR = (1 − 0.021) × 109.25
= 106.95 Watt 7. Efisiensi motor induksi (η)
η =Pout
Pin × 100 %
=106.95
286.58× 100%
= 37.31 %
Dengan cara perhitungan yang sama akan diperoleh rugi-rugi total motor dan efisiensi motor untuk beban 2Nm, 3 Nm, 4 Nm, 5 Nm, pada frekuensi 30 Hz.
Adapun hasil perhitungan yang dilakukan disusun dalam tabel 4.6 sebagai berikut:
Tabel 4.6Data hasil perhitungan motor induksi dengan penambahan inverter(frekuensi 30 Hz)
Beban
(Nm)
Vin (V)
Iin (A)
Pf nr (rpm)
slip Pin (W)
Pout (W)
η
0 152 3.68 0.18 891 0.010 177.33 (P0)
1 152 3.74 0.28 881 0.021 286.58 106.95 37.31 2 152 3.80 0.35 872 0.031 363.97 180.85 49.68 3 152 4.00 0.44 860 0.044 481.64 290.92 60.40 4 152 4.20 0.52 840 0.066 597.68 392.60 65.68 5 152 4.70 0.60 815 0.094 771.73 538.52 69.78
Untuk mempermudah dalam memahami dan melakukan analisa data hasil perhitungan, maka hasil perhitungan ditampilkan dalam grafik Gambar 4.3 dan Gambar 4.4.
Gambar 4.3Grafik beban vs kecepatan motor induksi dengan penambahaninverter (30 Hz)
891
881
872
860
840
815
760 780 800 820 840 860 880 900
0 1 2 3 4 5
Kecepatan putar (rpm)
Beban (Nm)
Hubungan beban terhadap kecepatan
Gambar 4.4 Grafik beban vs slip motor induksi dengan penambahan inverter(30 Hz)
2. Frekuensi 40 Hz
Dari percobaan, saat motor dioperasikan dari inverter variable speed drive dengan frekuensi 40 Hz dan diberi beban sebesar 1 Nm, diperoleh data sebagai berikut:
V = 182 volt I = 3.7 Ampere Cos θ = 0.32 nr = 1189 rpm
0,01
0,021
0,031
0,044
0,066
0,094
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1
0 1 2 3 4 5
Slip
Beban (Nm)
Hubungan beban terhadap Slip
Kutub (p) = 4
1. Kecepatan medan putar stator (ns)
ns =120f
p =120 × 40
4 = 1200 rpm 2. Slip
S = ns− nr
ns =1200 − 1189
1200 = 0.009 3. Daya masuk pada motor (P In)
PIn= √3 × Vl× I1× cos θ
= √3 × 182 × 3.7 × 0.32
= 373.23 Watt
4. Rugi daya inti pada saat tanpa beban (P0) P0 = √3 × V0 × I0× cos θ
= √3 × 182 × 3.68 × 0.2
= 232.01 Watt
5. Daya keluar stator (PoS) = Daya masuk ke rotor (Pin R) PoS= Pin R= PIn− (P0)
= 373.23 − (232.01)
6. Daya keluar motor (POut) POut = (1 − slip) × PinR
= (1 − 0.09) × 141.22
= 139.94 Watt
7. Efisiensi motor induksi (η)
η =Pout
Pin × 100 %
=139.94
373.23× 100%
= 37.49 %
Dengan cara perhitungan yang sama akan diperoleh rugi-rugi total motor dan efisiensi motor untuk beban 2Nm, 3 Nm, 4 Nm, 5 Nm, pada frekuensi 40 Hz.
Adapun hasil perhitungan yang dilakukan disusun dalam tabel 4.6 sebagai berikut:
Tabel 4.7 Data hasil perhitungan motor induksi dengan penambahan inverter (frekuensi 40 Hz)