1
Menentukan Jarak kedalaman Gambar dari Dua Gambar 2 Dimensi Dengan
Menggunakan Metode Trigonometri Sederhana
Moch Ali Rokhib Jurusan Teknik Informatika Universitas Muhammadiyah Sidoarjo Kampus 2. Jl. Raya Candi 250 Candi Sidoarjo
Community Collage Teknologi Informasi (CCTI) Sidoarjo Jl. Jenggolo 1c Buduran sidoarjo
Email : [email protected]
Abstraks
Ide dasar untuk menentukan kedalaman gambar ini adalah dengan membandingkan titik suatu objek dari dua buah gambar yang kemudian dengan menggunakan fungsi trigonometri untuk mencari kedalaman sebuah gambar yang ada. Memang seharusnya kamera yang di pergunakan untuk mengambil gambar adalah kamera khusus yang di pergunakan untuk gambar stereo dan tahu akan kalibrasi kamera yang di pergunakan. Tetapi hal itu tidaklah menjadi masalah dalam mempelajari computer vision.
Kata kunci: Trigonometri, gambar stereo, Kalibrasi
1. PENDAHULUAN
Komputer vision merupakan cabang ilmu komputer yang mempelajari tentang bagaimana cara komputer memandang, mengamati dan mengenali suatu objek atau benda. Di dalam sebuah pengenalan suatu objek disini di perlukan beberapa perhitungan dan cara untuk mengaplikasikannya. Telah banyak penelitian yang telah di lakukan dan banyak pula metode-metode dan teori-teori yang telah di hasilkan dalam bidang komputer vision ini.
Khususnya dalam bidang rekonstruksi tiga dimensi banyak peneliti mengkaji bagaimana cara mencari kedalam gambar atau sumbu Z dari suatu gambar yang telah di buat. Seperti yang di lakukan oleh Elli Petsa, George E. Karras [1], Antonio Torralba and Aude Oliva [2]
disini penulis mencoba untuk mengaplikasikan bagaimana menentukan sebuah kedalaman gambar yang penulis ambil dari input dua buah foto dan di olah dengan menggunakan metode yang paling sederhana untuk mendapatkan kedalaman sebuah gambar. Aplikasi yang mungkin bisa di buat dengan sistem ini adalah bagaimana kita melakukan rekonstruksi sebuah objek tiga dimensi dari input dua buah gambar dua dimensi yang telah ada.
Disini
2.
DASAR PEMIKIRAN2.1
Segitiga Siku-SikuSegitiga adalah sebuah bangun dua dimensi dimana jumlah sudutnya jika di jumlahkan akan berjumlah
180 derajat. Sebuah segitiga akan disebut dengan segitiga siku-siku bilamana salah satu sudutnya memiliki besaran 90 derajat.
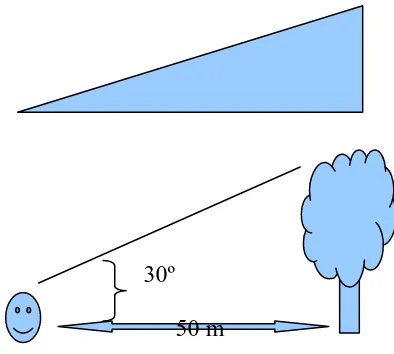
Segitiga siku-siku ini di dalam aplikasinya di kehidupan sehari hari dapat di pergunakan untuk menentukan tinggi dari sebuah objek dengan di ketahui jarak dan sudutnya.
Gambar 2.1 Mengukur ketinggian
Pada contoh kasus di atas (Gambar 2.1) disitu di ketahui jarak kita dengan pohon tersebut adalah 50 meter, sedang waktu kita melihat pucuk dari pohon kita memerlukan sudut 30 derajat. Dengan menggunakan fungsi-fungsi trigonometri sederhana
30º
2
ketinggian dari pohon tersebut.2.2
TrigonometriTrigoneometri berasal dari bahasa yunani yang berarti trigon yang berarti sudut dan metro yang berarti mengukur. Arti dari trigonometri adalah sebuah cabang ilmu matematika yang berhadapan dengan sudut segitiga dan fungsi trigonometrik seperti fungsi sinus, cosinus dan tangen[3].
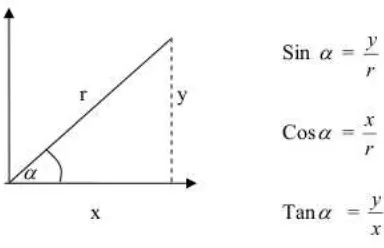
Fungsi-fungsi dasar dari trigonometri adalah sebagai berikut di bawah ini[4]:
Gambar 2.2 Rumus dasar trigonometri
Pada gambar 2.1 diatas dengan variabel yang sudah ada kita dapat menggunakan rumus tangen untuk memperkirakan ketinggian dari pohon yang kita lihat.
y = Tan
α * x
Sehingga di perkirakan tinggi pohon adalah 28,9 meter.
Dalam penggunaanya disini trigonometri di pergunakan untuk menentukan atau mencari kedalaman gambar dari input 2 buah gambar foto yang di ambil tanpa melihat atau menghitung kalibrasi kamera yang di pergunakan.
2.3
Menentukan Kedalaman GambarIde dasar untuk menentukan kedalaman gambar ini adalah dengan membandingkan titik suatu objek dari dua buah gambar yang kemudian dengan menggunakan fungsi trigonometri untuk mencari kedalaman sebuah gambar yang ada.
Seperti halnya dengan mata manusia, dimana mata yang sebelah kanan akan melihat sesuatu yang sedikit berbeda dengan apa yang di lihat dari mata kiri. Semakin jauh sebuah objek maka akan semakin kecil perbedaanya, dan semakin dekat mata kita dengan objek maka akan terlihat semakin besar berbedaanya. Perbedaan-perbedaan tersebut ada karena titik sudut
kita memandang maka titik sudut yang di buat mata kita semakin kecil, dan semakin dekat objek dengan mata kita maka sudut yang di buat akan semakin besar.
Gambar 2.3. Ilustrasi Pandangan mata a) jauh, b) dekat
Dari dasar seperti di atas sekiranya kita dapat mengambil perhitungan untuk menentukan kedalaman atau jarak suatu objek yang ada.
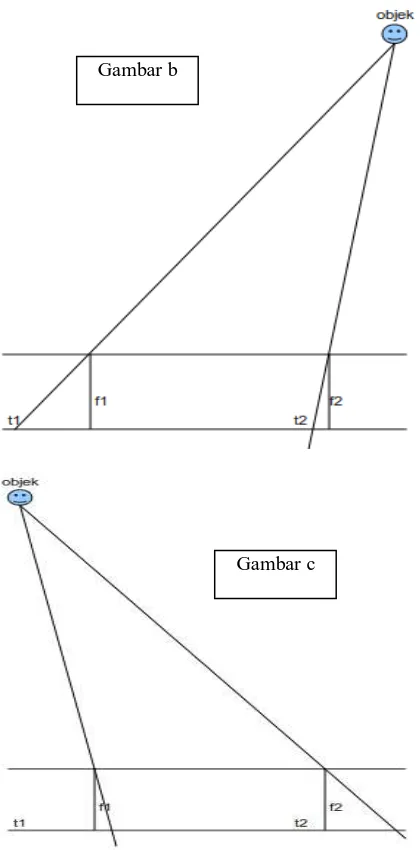
Di dalam menentukan kedalaman gambar ada 3 kemungkinan yang akan terjadi yang akan mempengaruhi sudut dari suatu objek yaitu apakan objek tersebut ada di depan mata, ataukah objek itu ada di sebelah kanan atau mungkin objek itu ada di sebelah kiri.
3
Gambar 2.4 Kemungkinan Posisi Objeka) tengah b) kanan c) kiri
Untuk menghitung kedalaman gambar yang pertama yang harus kita lakukan adalah mencari garis tegak dari dimana panjang dari R adalah jarak kedua titik objek gambar baik itu yang sebelah kanan maupun sebelah kiri. Dan sudut β adalah sama dengan sudut
α, dimana sudut α adalah sudut antara fokus 2 (f2)
dengan jarak titik 2 (t2) . Dan sehingga dari variabel-variabel tersebut disini kita dapat mengambil rumus di bawah sehingga akan di dapatkan panjang sisi tegaknya dari segitiga siku-siku (S). (untuk lebih jelasnya dapat di lihat pada gambar 2.5)
Untuk mencari sudut dari antara titik objek dan kedua
gambar (θ) dapat di cari dengan rumus sebagai
berikut di bawah ini
dengan kedua variabel dari rumus yang telah ada sebelumnya disini kita sudah dapat mencari kedalaman (T) dari objek benda yang kita cari dengan rumus yang ada di bawah ini:
Dan dari rumus di atas kita sudah dapat mencari sisi tegak untuk kedalaman suatu ojek dengan menggunakan rumus di bawah ini:
Untuk lebih jelasnya lihat pada gambar 2.5 di bawah ini :
Gambar b
Gambar c
S = cos(β) * R
δ
-
α, bila t1>f1 and t2>t2
θ α
-
δ, bila t1<f1 and t2<t2
δ+α, bila t1>=f1 and t2<=t2
T = S / sin(θ
)
4
3. RANCANGAN PENELITIAN
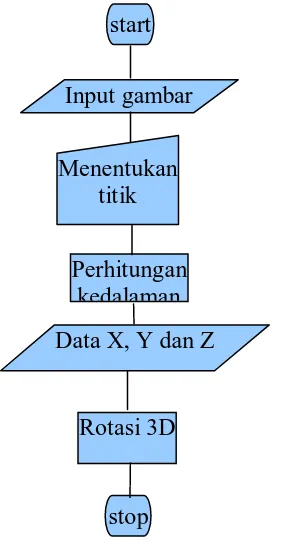
Untuk mengaplikasikan perumusan di atas disini kami merancang program sebagai berikut :
Gambar 3.1 Rancangan Program
Dalam perancangan di atas untuk input gambar di sini kami menggunakan dua buah gambar foto yang di ambil dari posisi jarak yang berbeda, tanpa di ketahui berapa jaraknya untuk pengambilan foto tersebut. Untuk menentukan titik-titiknya kami lakukan dengan cara manual yang kami posisikan langsung pada titik objek dari kedua gambar. Dan perhitungan yang kami pergunakan dasarnya adalah sebagaimana yang telah di bahas pada bagaian 2.3 sehingga akan kam dapat hasil data untuk posisi X, Y dan Z yang hasilnya kemudian kami rotasikan dalam bentuk 3 dimensi untuk memudahkan pembuktian dari posisi yang kami aplikasikan.
4. HASIL PERCOBAAN
Dari hasil percobaan yang kami buat adalah sebagai berikut :
Dari gambar 4.1 tersebut, dengan data yang kami ambil adalah titik-titik yang sudah kami tempelkan pada objek kami hasilkan data-data tersebut di bawah ini:
No tx1 tx2 S T Z
1 243 134 117,06 122,83 108,03
2 255 146 204,54 866,17 130,11
3 192 83 248,86 389,26 147,94
4 201 95 326,95 353,44 205,64
5 220 114 360,48 369,81 265,66
6 214 108 131,47 132,82 132,81
7 258 153 355,03 378,7 172,48
8 249 144 205,75 406,31 219,86
9 213 108 278,66 288,27 288,26
10 180 80 255,67 255,98 297,82
11 145 44 263,04 267,33 267,18
Tabel 4.1 data dan hasil perhitungan
Pada tabel di atas tx1 adalah data dari titik x pada gambar sebelah kanan. Dan tx2 adalah data x dari gambar sebelah kiri. Dimensi ambar yang kami pergunakan sebagai contoh di atas berukuran 320 untuk lebarnya dan 240 untuk tingginya. Dan untuk ketinggian fokus kami pergunakan setengah lebar dari gambar yang di pergunakan. Dan untuk masing-masing titik fokus kami tempatkan di tengah-tengan gambar yaitu pada 160 untuk fokus ke satu dan 480 pada fokus ke dua. Dan untuk hasil simulasi yang di pergunakan di dalam penggambaran objek 3 dimensi dapat di lihat pada gambar berikut di bawah ini :
Gambar 4.2 Hasil penggambaran 3D dengan sudut 0°
Input gambar
Menentukan
titik
start
stop
Perhitungan
kedalaman
Data X, Y dan Z
5
Gambar 4.3 Hasil penggambaran 3D dengan sudut45°
Gambar 4.4 Hasil penggambaran 3D dengan sudut 90°
Gambar 4.5 Hasil penggambaran 3D dengan sudut 60°
5. KESIMPULAN
Kesimpulan yang dapat kami ambil dari percobaan-percobaan yang kami lakukan adalah bahwa dengan menggunakan rumus di trigonometri sederhana kita dapat mencari kedalaman suatu objek benda. Tetapi masih perlu di perhatikan juga adanya kalibrasi untuk melakukan atau mencari posisi objek yang real atau yang sesuai dengan perbandingan yang aslinya. Kesalahan-kesalahan dapat di mungkinkan jika kita mengambil titik dari objek meleset dari titik yang kita tentukan karena dalam penelitian ini kami masih menggunakan penitikan atau penandaan dengan cara manual.
Kemudahan dan keserhanaan untuk pengaplikasian suatu rumus matematika di harapkan dapat menimbulkan kepercayaan dan pengembangkan diri dengan kepercayaan bahwa sesuatu hal yang rumit itu di mulai dari yang sederhana.
6.
REFERENSI1. Elli Petsa, George E. Karras,
“CONSTRAINED LINE - PHOTOGRAMMETRIC 3D
RECONSTRUCTION FROM STEREOPAIRS
”, IAPRS, Vol. XXXIII, Amsterdam, 2000
2. Antonio Torralba and Aude Oliva,
“Depth Estimation from Image Structure ”, IEEE TRANSACTIONS ON PATTERN
ANALYSIS AND MACHINE INTELLIGENCE,
VOL. 24, NO. 9, SEPTEMBER 2002