SKRIPSI
PURWARUPA PENGATURAN LAMPU OTOMATIS DENGAN PENGOLAHAN CITRA BERBASIS OPENCV
THE PROTOTYPE OF CONTROLLING AUTOMATIC BEAM WITH IMAGE PROCESSING BASED ON OPENCV
FAUZIAZZUHRY RAHADIAN
08/265919/PA/11928
PROGRAM STUDI ELEKTRONIKA DAN INSTRUMENTASI
JURUSAN ILMU KOMPUTER DAN ELEKTRONIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
UNIVERSITAS GADJAH MADA
YOGYAKARTA
i
SKRIPSI
PURWARUPA PENGATURAN LAMPU OTOMATIS DENGAN PENGOLAHAN CITRA BERBASIS OPENCV
Diajukan untuk memenuhi salah satu syarat memperoleh derajat Sarjana Sains Program Studi Elektronika dan Instrumentasi
FAUZIAZZUHRY RAHADIAN
08/265919/PA/11928
PROGRAM STUDI ELEKTRONIKA DAN INSTRUMENTASI
JURUSAN ILMU KOMPUTER DAN ELEKTRONIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
UNIVERSITAS GADJAH MADA
YOGYAKARTA
HALAMAN PENGESAHAN
SKRIPSI
PURWARUPA PENGATURAN LAMPU OTOMATIS DENGAN PENGOLAHAN CITRA BERBASIS OPENCV
Telah dipersiapkan dan disusun oleh
FAZIAZZUHRY RAHADIAN 08/265919/PA/11928
Telah dipertahankan di depan tim penguji pada tanggal 1 Maret 2013
Susunan Timq q Penguji
Pembimbing / Penguji I
Drs. Agus Harjoko, M.Sc, Ph.D 19600804 1987 03 1 003
Penguji II
Dr. Ahmad Ashari, M.Kom. 19630502 1990 03 1 005
Penguji III
PERNYATAAN
Dengan ini saya menyatakan bahwa laporan skripsi ini tidak terdapat karya yang pernah diajukan untuk memperoleh gelar kesarjanaan di suatu Perguruan Tinggi, dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau diterbitkan oleh orang lain, kecuali secara tertulis diacu dalam naskah ini dan disebutkan dalam daftar pustaka.
Yogyakarta, Maret 2013
HALAMAN MOTTO
“Don’t code today, what you can’t share tommorow”- Anonymous (Open Source
Community)
“Sesungguhnya Allah mencintai orang mukmin yang kuat” –Rassullullah SAW
KATA PENGANTAR
Puji Syukur kita panjatkan kepada Allah SWT atas petunjuk dan kasih sayang-Nya juga telah melimpahkan semua rahmat, hidayah, dan karunia-sayang-Nya sehingga penulis dapat menyelesaikan skripsi yang berjudul “Purwarupa Pengaturan Lampu Otomatis Dengan Pengolahan Citra Berbasis OpenCV ”. Sholawat serta salam penulis tujukan kepada junjungan umat, Nabi Muhammad SAW yang telah memberikan tauladan dan inspirasi di segala aspek kehidupan. Skripsi ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana S1 Program Studi Elektronika dan Instrumentasi, Jurusan Ilmu Komputer dan Elektronika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Gadjah Mada Yogyakarta.
Dalam pembuatannya, penulis menyadari bahwa terselesaikannya skripsi ini tidak terlepas dari bantuan dan dukungan dari berbagai pihak. Oleh karena itu, dengan segala hormat pada kesempatan ini penulis ingin menyampaikan penghargaan dan terima kasih kepada:
1. Keluarga penulis atas kehilangan waktu dalam menyelesaikan penelitian ini.
2. Bapak Drs. Agus Harjoko, M.Sc., Ph.D selaku dosen pembimbing skripsi yang telah bersabar dan banyak meluangkan waktu untuk membimbing, memberikan ide dan pemikiran, serta saran juga masukan sehingga penulis dapat menyelesaikan skripsi ini dengan baik.
3. Dosen-dosen penulis selama mengikuti perkuliahan di program studi elektronika dan instrumentasi ini yang tidak bisa disebutkan namanya satu persatu, yang telah memberikan banyak ilmu dan bimbingan.
4. Adinda Nina Hetty U.K, hamba-Nya yang terindah, selalu setia, sabar dan memotivasi penulis.
5. Semua teman yang mendukung penulis menyelesaikan penelitian ini. 6. Semua pihak yang selama ini telah membantu, mendukung dan
menyemangati penulis hingga saat ini. Terima kasih, semoga Allah SWT membalas kebaikan Anda semua.
Yogyakarta, Maret 2013
DAFTAR ISI
HALAMAN PENGESAHAN ... ii
PERNYATAAN ..………..………..iii
HALAMAN MOTTO ...iv
KATA PENGANTAR...v
DAFTAR ISI ...vi
DAFTAR GAMBAR ...x
DAFTAR TABEL ...xiv
INTISARI………...……… xviii
ABSTRACT ...xix
BAB I. PENDAHULUAN ...1
1.1 Latar Belakang ...1
1.2 Rumusan Masalah ...1
1.3 Batasan Masalah ...2
1.4 Tujuan dan Manfaat ...3
1.5 Metodologi Penelitian...3
BAB II. TINJAUAN PUSTAKA ...4
BAB III. LANDASAN TEORI...7
3.1 Prinsip IntellegentCarSystem...7
3.1.1 Prinsip Automatic High Beam ...9
3.1.2 Warningsystem...12
3.2 Metode Pemrosesan Citra dengan Pendeteksian Objek ...13
3.2.1 Deteksi Warna RGB dan HSV ...15
3.2.2 Thresholding ...16
3.2.3 Smoothing ...17
3.2.4 Operasi Sobel ...19
3.2.5 Operasi Deteksi Tepi Canny ...20
3.2.6 Hough Circle Transform...21
3.2.7 OpenCV ...23
BAB IV METODE PENELITIAN ...24
4.1 Bahan...24
4.3 Prosedur Kerja dan Pengumpulan Data ...27
4.4 Analisis dan Rancangan Sistem ...27
4.4.1 Analisis kebutuhan fungsiomal...27
4.4.2 Analisis kebutuhan non fungsional...30
4.5 Rancangan penelitian ...31
4.5.1 Rancangan sistem segmentasi citra ...31
4.5.2. Rancangan diagram blok sistem ...32
4.5.3 Rancangan sistem pengenalan objek secara umum ...33
4.5.2 Rancangan sistem secara spesifik ...35
4.6 Rancangan Perangkat Lunak (Desain ROI) ...42
4.7 Rancangan Perangkat Keras ...43
4.7.1 Desain skematik perangkat keras ...43
4.7.2 Diagram alir perangkat keras. ...43
4.8 Rancangan Pengujian ...44
IMPLEMENTASI PENELITIAN ...46
5.1 Melakukan Inisialisasi ...46
5.1.1 Inisialisasi capture dan frame ...46
5.1.2 Deklarasi( Inisialisasi) fungsi- fungsi Hough C ircle...48
5.2 Region of Interest ...49
5.3 Konversi ke HSV dan Identifikasi Warna dengan Skala Warna HSV ...50
5.3.1 Metode pendeteksian warna dan jangkauan warna (colorspace)...50
5.3.2 Listing OpenCV untuk mengenali masing- masing jangkauan warna(colorspace). ...53
5.4 Fungsi smooth/blur...55
5.5 Fungsi Deteksi tepi dan Transformasi Hough Circle...57
5.5.1 Fungsi Sobel ...57
5.5.2 Fungsi Deteksi Canny dan Hough Circle...58
5.6 Pembatasan Wilayah ROI ...63
5.7 Cropping ROI F rame dan Duplikasi...64
5.8 Cuplikan Listing Cropping F rame dan Duplikasi ROI...65
5.9 Garis Bantu batas ROI, dan Perkiraan Jarak Dari Titik Nol...66
5.10 MultilevelThresholding dan Deteksi Sekuensial ...68
5.11.1 Model protipe sistem ...70
5.11.2 Setup Arduino...71
5.11.3 Pembacaan perintah serial ...71
5.11.4 Pewaktuan servo ...73
BAB VII. PENGUJIAN DAN PEMBAHASAN ...74
6.1 Kalibrasi pengujian ...74
6.1.1 Pengaturan nilai window dari filter smooth OpenCV...75
6.1.2 Metode pendeteksian pola warna di OpenCV dengan menggunakan Hough Circle ...76
6.1.3 Penjelasan hasil kalibrasi pendeteksian pola warna di OpenCV dengan menggunakan Hough Circle...78
6.1.4 Kesimpulan hasil kalibrasi...88
6.2 Pengujian Tiap Tipe Jalan Dalam Kondisi Hujan dan Cerah………..………91
6.2.1 Jalan negara ...91
6.2.2. Jalan provinsi...93
6.2.3. Jalan kabupaten ...106
6.2.4. Jalan desa...109
6.2.5. Jalan sepi dan menanjak ...112
6.3 Hasil Pengujian Kendaraan………...………….…117
6.3.1 Hasil pengujian pada lampu depan kendaraan………117
6.3.2 Hasil pengujian pada lampu belakang kendaraan...121
6.4 Respon Aktuator (Arduino) ...123
BAB VIII. PENUTUP ...125
7.1 Kesimpulan ...125
7.2 Saran ...126
DAFTAR PUSTAKA ...128
LAMPIRAN DATA KALIBRASI...130
L1 Kisaran Warna Lampu Kendaraaan ...130
L1.1 Kisaran warna lampu belakang kendaraan pada format HSV ...130
L1.3 Kisaran warna lampu depan mobil khusus jenis
Lampu HID ...132
L2 Variasi Nilai Window Smooth ...133
L3. Variasi Nilai Jarak Antar Titik Tengah Centroid...134
L3.1 Variasi nilai jarak antar pusat tengah lingkaran pada lampu depan mobil ...134
L3.2 Variasi nilai jarak antar pusat tengah lingkaran lampu belakang mobil setting exposure =100%, canny threshold=10-255. radius= 3-40 ...136
L4. Variasi nilai Exposure, ...138
L4.1 Lampu Depan Mobil jarak p.p=50 ...138
L4.2 Lampu depan motor jarak p.p=50 ...140
L4.3. Lampu belakang mobil, jarak p.p=40 ...141
L4.4 Lampu belakang motor, jarak p.p=40 ...143
L5. Variasi Exposure dan Variasi Thresholding...145
L5.1. Variasi exposure dan variasi thresholding lampu depan mobil ...145
L5.2 Exposure 87,5% dan variasi thresholding pada lampu depan motor ...147
L5.3. Exposure 87,5% dengan variasi thresholding lampu belakang mobil. ...148
L5.4 Exposure 87,5% dengan variasi thresholding lampu belakang motor. ...148
L6 Variasi Nilai Canny Threshold...149
L6.1 Lampu depan mobil...149
L6.2 Lampu depan motor ...151
L6.3 Lampu belakang mobil ...152
L6.4. Lampu Belakang Motor ...154
L7 Pengujian Akurasi Deteksi ...156
L7.1 Koreksi lampu depan motor ...156
L7.2 Koreksi lampu depan mobil ...157
LAMPIRAN LISTING PROGRAM...161
LP1 Listing Program Kalibrasi ...161
LP2 Listing Program Final ...167
DAFTAR GAMBAR
Gambar 3.1 Model IntellegentCar ...7
Gambar 3.2 Contoh Sistem kendali pada Intellegent Car...8
Gambar 3.3 Diagram kesalahan yang menyebabkan kecelakaan ...9
Gambar 3.4 Model Automatic High Beam milik Renault System ...10
Gambar 3.5 Perbedaan Segmentasi Warna Lampu HID dengan Ha logen ...10
Gambar 3.6 Simulasi kontrol lampu jarak jauh otomatis ...11
Gambar 3.7 Cara Kerja Pengendalian Lampu Jarak Jauh dan Dekat Otomatis ..12
Gambar 3.8 Fitur Night Vision Auto Br eaking System...12
Gambar 3.9 Pengolahan sinyal pada Citra Digital ...13
Gambar 3.10 Koordinat Citra Digital pada titik origin ...14
Gambar 3.11 Kubus Model RGB ...15
Gambar 3.12 Kerucut HSV ...16
Gambar 3.13 Contoh hasil thresholding ...17
Gambar 3.14 Contoh hasil Gaussian Smoothing ………… ...………..17
Gambar 3.15 Hasil dari transformasi Gaussian Blur ...18
Gambar 3.16 Hasil dari transformasi Gaussian Blur 2 D ...19
Gambar 3.17 Hasil Operasi Sobel ………...……….19
Gambar 3.18 Hasil deteksi tepian dengan (a) threshold tunggal (b) threshold tinggi dan rendah ...20
Gambar 3.19 Hasil deteksi tepian Canny ...21
Gambar 3.20 Proses mendeteksi lingkaran dengan Hough Circle Transform ...21
Gambar 3.21 Hasil pendeteksian citra dengan Hough Circle Transform ...22
Gambar 4.1 Hasil capture video dari dalam mobil ...24
Gambar 4.2 Kamera Sonny Hybr id HDR-CX110E ...25
Gambar 4.3 Diagram proses segmentasi citra ...31
Gambar 4.4 Diagram blok kendali sistem (a) diagram lampu jauh otomatis, (b) diagram blok sistem peringatan otomatis...32
Gambar 4.5 Diagram alir rancangan sistem perangkat lunak secara umum ...33
Gambar 4.6 Diagram alir rancangan spesifik deteksi lampu belakang ...39
Gambar 4.7 Diagram alir (a) prioritas kendali posisi servo dan (b) intepretasi lampu belakang kendaraan ...41
Gambar 4.8 Desain skematik perangkat lunak...42
Gambar 4.10 Diagram alir perangkat keras ...44
Gambar 4.11 Perkiraan pemasangan kamera dibalik mirror tengah...45
Gambar 5.1 Inisialisasi capture frame ...46
Gambar 5.2. Inisialisasi capture frame ...47
Gambar 5.3 Deklarasi penyimpanan memory dan tipe data pointer Hough Circles. ...48
Gambar 5.4. Hasil Cropping ROI (kiri) dari Frame Asli (kanan). ...49
Gambar. 5.5 Listing Query Frames dan Cropping ROI ...50
Gambar 5.6 Contoh gambar(sampel) yang digunakan untuk mencari skala nilai HSV lampu (a) lampu depan kendaraan, (b) lampu belakang kendaraan. ...51
Gambar 5.7 Sampel gambar kendaraan dengan lampu HID ...52
Gambar 5.8 Listing konversi frame dari basis RGB ke HSV pada lampu depan dan belakang ...54
Gambar 5.9 Hasil RGB ke Grayscale untuk lampu depan ...54
Gambar 5.10 Hasil pembacaan objek untuk lampu depan dan belakang kendaraan. ...55
Gambar 5.11 Listing proses smooth pada OpenCV ...56
Gambar 5.12 Hasil frame a) citra tanpa Smoothing dan b) citra dengan Smoothing ...56
Gambar 5.13 Hasil Operasi Sobel (a) citra asli (b) hasil Operasi Sobe l ...57
Gambar 5.14 Listing Operasi Sobel ...58
Gambar 5.15. Hasil (a) Edge Detection dilanjutkan dengan Transformasi Hough Circle ...58
Gambar 5.16 Listing fungsi deteksi sequential pada frame proses merah dan proses putih ...59
Gambar 5.17 Iterasi fungsi Sequential putih untuk mendapat titik centroid, dan menetapkan batas vertikal pendeteksian ...60
Gambar 5.18 Fungsi drawing pada OpenCV untuk menandakan daerah yang ditandai sebagai area terdeteksi ...61
Gambar 5.19 Hasil pemrosesan citra (a) frame sebelum dibatasi, (b) frame sesudah dibatasi (ROI ...62
Gambar 5.20 Pembatasan wilayah ROI ...63
Gambar 5.21 Deteksi mobil dari jarak 80 meter ...64
Gambar 5.22 Konsep implementasi ROI pada main frame ...65
Gambar 5.24 Hasil cloning frame kanan dan frame kiri, untuk keperluan
pembatasan ROI dan multi thresholding frame ...67
Gambar 5.25 Hasil deteksi berbagai tingkat thresholding frame, ditunjukkan oleh warna...68
Gambar 5.26 Hasil deteksi berbagai tingkat thresholding frame, ditunjukkan oleh warna...70
Gambar 5.27 Listing inisialisasi serial dan port pada Arduino ...71
Gambar 5.28 Listing program par sing serial Arduino ...72
Gambar 5.29 Listing pewaktuan servo pada Arduino ...73
Gambar 6.1 Skema kalibrasi pendeteksian, di Lapangan SMA N 2 , Donoharjo, Ngaglik, Sleman ...74
Gambar 6.2 Hasil filter image, dengan smooth, pada ukuran kernel (a) 9x9 dan (b) 15x15 ...75
Gambar 6.3 Hasil filter dengan minimal jarak pendeteksian antar titik pusat, (a) jarak 50 pixel (b) jarak 10 pixel ...78
Gambar 6.4 Hasil pendeteksian dengan basis, (a) exposure 62,5% (b) exposure 87,5% ...79
Gambar 6.5 Grafik threshold frame (X) vs maksimal jarak mobil terdeteksi (Y) ...82
Gambar 6.6 Grafik Thr eshold frame (X) vs maksimal jarak motor terdeteksi (Y) ...82
Gambar 6.7 Grafik jarak mobil terkalibrasi (X) vs tinggi koordinat vertikal centroid pada minimum threshold 20 (jangkauan 20-255) ...84
Gambar 6.8 Grafik jarak mobil terkalibrasi (X) vs tinggi koordinat vertikal centroid pada minimum Threshold 20 (jangkauan 20-255) ...85
Gambar 6.9 Grafik Jarak mobil terkalibrasi (X) vs tinggi koordinat vertikal centroid pada minimum Threshold 10 (jangkauan 10-255) ...86
Grafik 6.10 Grafik Jarak motor terkalibrasi (X) vs tinggi koordinat vertikal centroid pada minimum Threshold 10 (jangkauan 10-255) ...86
Gambar 6.11 Pendeteksian Jalan Magelang pada saat hujan ...91
Gambar 6.12 Pendeteksian Jalan Magelang pada saat cerah ...92
Gambar 6.13 Pendeteksian Ringroad jalur lambat pada saat hujan ...94
Gambar 6.14 Pendeteksian Ringroad jalur cepat pada saat hujan ...96
Gambar 6.15 Pendeteksian Ringroad jalur cepat pada saat hujan ...97
Gambar 6.16 Pendeteksian pada Jalan Kaliurang KM 9 pada saat hujan ...99
Gambar 6.17 Pendeteksian pada Ringroad jalur lambat pada saat cerah...100
Gambar 6.19 Pendeteksian pada Ringroad jalur cepat pada saat cerah ...103
Gambar 6.20 Pendeteksian pada Jalan Kaliurang KM 7 saat cerah...105
Gambar 6.21 Pendeteksian pada Jalan Beran saat hujan ...106
Gambar 6.22 Pendeteksian pada Jalan Damai saat cerah...108
Gambar 6.23 Pendeteksian pada Jalan Panggung Sari saat hujan...109
Gambar 6.24 Pendeteksian pada Jalan Lempong Sari saat hujan ...111
Gambar 6.25 Pendeteksian pada Jalan Turgo saat cerah ...112
Gambar 6.26 Pendeteksian pada Jalan Pulowatu saat cerah ...113
Gambar 6.27 Pendeteksian pada Lapangan Donoharjo (lampu dekat) ...115
DAFTAR TABEL
Tabel 2.1 Studi tentang penerapan Automatic High Beam/ Low Beam
dan Automatic Warning ...6
Tabel 3.1 Nilai sudut dan warna pada Hue ...16
Tabel 4.1 Kebutuhan mobil model kalibrator ...26
Tabel 4.2 Kebutuhan motor model kalibrator ...26
Tabel 4.3 Kebutuhan hardware pemroses video...27
Tabel 4.4 Kebutuhan software pemroses video ...28
Tabel 4.5 Setting sensor Handycam Sonny Hybr id HDR-CX110E ...28
Tabel 4.6 Hasil Konversi dengan software F ormat F actory...29
Tabel 4.7 Tabel spesifikasi kontroller Arduino Mega 2560...29
Tabel 4.8 Tabel spesifikasi aktuator...30
Tabel 4.9 Kebutuhan non fungsional ...30
Tabel 5.1 Kesimpulan jangkauan warna lampu depan dan lampu belakang pada format HSV...51
Tabel 5.2 Kesimpulan jangkauan warna lampu depan dan lampu belakang pada format HSV (OpenCV Format) ...52
Tabel 5.3 Nilai lampu HID pada format HSV, (a) kisaran warna lampu HID mobil (b) konversi dalam format OpenCV ...53
Tabel 5.4 Warna dan tingkat thresholding frame deteksi lampu depan...69
Tabel 5.5 Warna dan tingkat thresholding frame deteksi lampu belakang ...69
Tabel 5.6 Detail isyarat pemodelan sistem...70
Tabel 6.1 Nilai Lampu HID pada format HSV, (a) kisaran warna lampu HID mobil (b) konversi dalam format OpenCV ...89
Tabel 6.2 Warna dan tingkat thresholding frame lampu depan dan belakang kendaraan ...90
Tabel 6.3 Warna dan tingkat thresholding frame lampu belakang kendaraan ...90
Tabel 6.4 Intepretasi pengujian sampel Jalan Magelang hujan...91
Tabel 6.5 Intepretasi pengujian sampel Jalan Magelang hujan...93
Tabel 6.6 Pengujian sampel Ringroad jalur lambat hujan. ...95
Tabel 6.7 Intepretasi pengujian sampel Ringroad jalur cepat (hujan) ...96
Tabel 6.8 Intepretasi pengujian sampel Ringroad jalur cepat hujan ...98
Tabel 6.9 Intepretasi pengujian sampel Jalan Kaliurang saat hujan ...99
Tabel 6.11 Intepretasi pengujian sampel Ringroad jalur cepat saat cerah ...102
Tabel 6.12 Intepretasi pengujian sampel Ringroad jalur cepat saat cerah ...104
Tabel 6.13 Intepretasi pengujian sampel Jalan Kaliurang saat cerah...105
Tabel 6.14 Intepretasi pengujian sampel Jalan Kamdanen saat hujan ...107
Tabel 6.15 Intepretasi pengujian sampel Jalan Damai saat cerah ...108
Tabel 6.16 Intepretasi pengujian sampel Jalan Panggung Sari saat hujan ...110
Tabel 6.17 Intepretasi pengujian sampel Jalan Lempong Sari saat cerah ...111
Tabel 6.18 Intepretasi pengujian sampel Jalan Turgo saat hujan...112
Tabel 6.19 Intepretasi pengujian sampel Jalan Pulowatu saat hujan ...114
Tabel 6.20 Intepretasi pengujian sampel Lapangan Donoharjo (lampu dekat) ...115
Tabel 6.21 Intepretasi pengujian sampel Lapangan Donoharjo (lampu jauh) ...116
Tabel L1.1 Kisaran warna lampu belakang kendaraan ...130
Tabel L1.2 Kisaran warna lampu depan kendaraan ...131
Tabel L1.3 Kisaran warna lampu depan kendaraan (lampu HID) ...132
Tabel L.2.1 Kisaran warna lampu depan kendaraan ...133
Tabel L3.1 Jarak antar titik pusat jarak p.p=30, lampu depan mobil ...134
Tabel L3.2 Jarak antar titik pusat jarak p.p=40, lampu depan mobil ...134
Tabel L3.3 Jarak antar titik pusat jarak p.p=50, lampu depan mobil ...135
Tabel L3.4 Jarak antar titik pusat jarak p.p=60, lampu depan mobil ...135
Tabel L3.5 Jarak antar titik pusat jarak p.p=70, lampu depan mobil ...135
Tabel L3.6 Jarak antar titik pusat jarak p.p=30, lampu belakang mobil ...136
Tabel L3.7 Jarak antar titik pusat jarak p.p=40, lampu belakang mobil ...136
Tabel L3.8 Jarak antar titik pusat jarak p.p=50, lampu belakang mobil ...136
Tabel L3.9 Jarak antar titik pusat jarak p.p=60, lampu belakang mobil ...137
Tabel L3.10 Jarak antar titik pusat jarak p.p=70, lampu belakang mobil ...137
Tabel L4.1 Nilai exposure 100, jarak p.p 50 , lampu depan mobil ...138
Tabel L4.2 Nilai exposure 87,5, jarak p.p 50 , lampu depan mobil ...138
Tabel L4.3 Nilai exposure 75, jarak p.p 50 , lampu depan mobil ...139
Tabel L4.4 Nilai exposure 62,5, jarak p.p 50 , lampu depan mobil ...139
Tabel L4.5 Nilai exposure 50, jarak p.p 50 , lampu depan mobil ...139
Tabel L4.6 Nilai exposure 100, jarak p.p 50 , lampu depan motor...140
Tabel L4.7 Nilai exposure 87,5, jarak p.p 50 , lampu depan motor...140
Tabel L4.9 Nilai exposure 62,5, jarak p.p 50 , lampu depan motor...141
Tabel L4.10 Nilai exposure 50, jarak p.p 50 , lampu depan motor...141
Tabel L4.11 Nilai exposure 100, jarak p.p 40, lampu belakang mobil ...141
Tabel L4.12 Nilai exposure 87,5, jarak p.p 40, lampu belakang mobil ...142
Tabel L4.13 Nilai exposure 75, jarak p.p 40, lampu belakang mobil ...142
Tabel L4.14 Nilai exposure 62.5, jarak p.p 40, lampu belakang mobil ...142
Tabel L4.15 Nilai exposure 50, jarak p.p 40, lampu belakang mobil ...143
Tabel L4.16 Nilai exposure 100 , jarak p.p 40, lampu belakang motor ...143
Tabel L4.17 Nilai exposure 87,5 , jarak p.p 40, lampu belakang motor ...143
Tabel L4.18 Nilai exposure 75 , jarak p.p 40, lampu belakang motor ...144
Tabel L4.19 Nilai exposure 62,5 , jarak p.p 40, lampu belakang motor ...144
Tabel L4.20 Nilai exposure 50 , jarak p.p 40, lampu belakang motor ...144
Tabel L5.1 Exposure 87,5% dan variasi thresholding ...145
Tabel L5.2 Exposure 75% dan variasi thresholding ...146
Tabel L5.3 Exposure 62,5% dan variasi thresholding ...146
Tabel L5.4 Exposure 87,5% dan variasi thresholding ...147
Tabel L5.5 Exposure 87,5% dan variasi thresholding ...148
Tabel L5.6 Exposure 87,5% dan variasi thresholding ...148
Tabel L6.1 Canny threshold 20-255, exposure 87,5%, jarak p.p 50, lampu depan mobil ...149
Tabel L6.2 Canny threshold 15-255, exposure 87,5%, jarak p.p 50, lampu depan mobil ...149
Tabel L6.3 Canny threshold 10-255, exposure 87,5%, jarak p.p 50, lampu depan mobil ...150
Tabel L6.4. Canny threshold 5-255, exposure 87,5%, jarak p.p 50, lampu depan mobil ...150
Tabel L6.5 Canny threshold 1-255, exposure 87,5%, jarak p.p 50, lampu depan mobil ...150
Tabel L6.6. Canny threshold 20-255, exposure 87,5%, jarak p.p 50, lampu depan motor ...151
Tabel L6.7 Canny threshold 15-255, exposure 87,5%, jarak p.p 50, lampu depan motor ...151
Tabel L6.8 Canny threshold 10-255, exposure 87,5%, jarak p.p 50, lampu depan motor ...151
Tabel L6.10 Canny threshold 1-255, exposure 87,5%, jarak p.p 50, lampu
depan motor ...152
Tabel L6.11 Canny threshold 15-255, exposure 87,5%, jarak p.p 50, lampu belakang mobil...152
Tabel L6.12 Canny threshold 13-255, exposure 87,5%, jarak p.p 40, lampu belakang mobil...153
Tabel L6.13 Cannythreshold 10-255, exposure 87,5%, jarak p.p 40, lampu belakang mobil...153
Tabel L6.14 Cannythreshold 8-255, exposure 87,5%, jarak p.p 40, lampu belakang mobil...153
Tabel L6.15 Canny threshold 5-255, exposure 87,5%, jarak p.p 40, lampu depan mobil ...154
Tabel L6.16 Canny threshold 15-255, exposure 87,5%, jarak p.p 40, lampu belakang motor. ...154
Tabel L6.17 Canny threshold 13-255, exposure 87,5%, jarak p.p 40, lampu belakang motor. ...154
Tabel L6.18 Canny threshold 10-255, exposure 87,5%, jarak p.p 40, lampu belakang motor ...155
Tabel L6.19 Canny threshold 8-255, exposure 87,5%, jarak p.p 40, lampu belakang motor ...155
Tabel L6.20 Canny threshold 5-255, exposure 87,5%, jarak p.p 40, lampu belakang motor ...155
Tabel L7.1 Lampu pendek motor ...156
Tabel L7.2. Lampu jauh motor...157
Tabel L7.3. Lampu dekat mobil ...157
Tabel L7.4. Lampu jauh mobil...158
Tabel L7.5 Lampu belakang motor ...159
INTISARI
PURWARUPA PENGATURAN LAMPU OTOMATIS DENGAN PENGOLAHAN CITRA BERBASIS OPENCV
Oleh
Fauziazzuhry Rahadian 08/265919/PA/11928
Automatic High Beam dan Warning System adalah salah satu pengembangan dari sistem cerdas pada mobil untuk mendukung kenyamanan dan keamanan dalam berkendara. Dalam menerapkan prinsip tersebut, terlebih dahulu harus diketahui berapa jarak objek yakni lampu depan kendaraan atau lampu belakang kendaraan, yang ada di depan pengemudi. Sehingga dibutuhkan teknologi Pemrosesan Citra untuk dapat mendeteksi objek dan mendapatkan perkiraan jarak yang baik dalam jangkauan mencapai ratusan meter.
Maka dikembangkan pengenalan objek dengan memisahkan objek dengan lingkungan melalui rentang warna dalam format HSV, kemudian mengekstraksi tepian objek dengan menggunakan metode Hough Circle untuk mendapat objek terdeteksi pada suatu nilai filter threshold. Objek akan mempunyai titik tengah (centroid) pada koordinat (x,y). Untuk mendapatkan perkiraan jarak dengan metode tersebut dilakukan kalibrasi pada tanah lapang dengan jarak antara 10-90 meter. Dari hasil kalibrasi didapatkan estimasi jarak dapat dilakukan dengan koordinat vertikal centroid, kemudian variasi antara nilai threshold dan exposure. Dengan mendapatkan perkiraan jarak, dapat dilakukan pengaturan intensitas cahaya dan posisi lampu jauh atau dekat saat mendeteksi objek lampu depan kendaraan mobil dan motor. Dengan memperkirakan jarak dengan deteksi lampu belakang kendaraan didepan objek, diberikan peringatan sesuai dengan intensitas cahaya pada saat rem atau normal, dan juga perkiraan jaraknya. Bentuk peringatan yang diberikan adalah dengan indikasi peringatan di display tampilan.
ABSTRACT
THE PROTOTYPE IMAGE PROCESSING OF AUTOMATIC HIGH BEAM AND WARNING IN INTELLEGENT CAR BASED ON OPENCV
By
Fauziazzuhry Rahadian 08/265919/PA/11928
Automatic High Beam and Warning System is one of the developments of intelligent systems on the car to support comfort and safety in the driving experience. In applying these principles, it must first be known how many objects within the vehicle headlights or taillights of vehicles, which is in front of the driver. So it takes image processing technology to detect objects and get a good estimate of the distance in the range of hundreds of meters.
Then developed object recognition by separating an object with the environment through a range of color in HSV format and then extracting object edges by using the Hough Circle to get objects detected at a threshold value filter. Object will have the center (centroid) in the coordinates (x, y). To get an estimate of the distance to the method of calibration is done at the clearing with a distance of between 10-90 meters. F rom the calibration results obtained distance estimation can be done with the vertical coordinate centroid, then the variation between the threshold value and exposure.
With an estimated distance, to do the setting of light intensity and light position detecting distant or near objects headlights when cars and motorcycles. By estimating the distance to the vehicle in front of the rear light detection of objects, in a warning to the intensity of light at the time of the brakes or normal, and also estimate the distance. Shape the warning is a warning indication on the display with the display
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Teknologi keamanan dan kenyamanan kendaraan sampai saat ini terus berkembang pesat. Inovasi pada manufaktur mobil pun terus dikembangkan untuk mendukung keamanan dan kenyamanan pengguna kendaraan (Sharma and Dhixit, 2012). Terlebih untuk masalah pengemudian kendaraan secara aman, menjadi faktor yang tidak bisa ditawar lagi dalam teknologi mobil mutakhir.
Pemrosesan Citra digital adalah ilmu untuk memanipulasi, mengolah ataupun mengenali bagian tertentu pada suatu citra (Gonzales and Woods, 2008). Contohnya adalah suatu citra mempunyai kontras lebih rendah dapat dihasilkan dari sumber citra dengan proses pencahayaan atau penerangan yang rendah atau pengaturan pada saat pengambilan gambar.
Automatic High Beam/Low Beam adalah suatu teknologi dengan memanfaatkan pemrosesan citra dengan metode Object Recognition untuk mendeteksi objek dan dengan bantuan thresholding untuk mendeteksi gelap terang suatu citra, kemudian mengontrol lampu apakah menggunakan lampu dekat atau lampu jauh pada mobil.
Automatic Warning adalah teknologi untuk memberikan peringatan kepada pengemudi apabila ada objek didepannya pada jarak dekat, dengan cara mendeteksi benda terdekat dengan menggunakan sensor jarak/kamera pada objek didepannya.
1.2 Rumusan Masalah
intepretasi sistem untuk mengontrol lampu dan me mberi peringatan pada pengemudi
1.3 Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
1. Menganalisis tingkat keberhasilan pemrosesan citra dengan metode Hough Circle untuk mendeteksi lampu depan kendaraan dari arah berlawanan, dan lampu belakang kendaraan yang berjalan searah, serta mengurangi error pada pencahayaan disekitarnya.
2. Input adalah berupa video, kemudian diproses dengan pengolahan citra pengenalan pola warna lampu depan dan lampu belakang motor dan mobil.
3. Diasumsikan kamera tegak lurus dengan objek. Sehingga parameter tinggi vertikal pada saat datar dapat digunakan untuk memisahkan lampu depan dan belakang kendaraan dengan lampu lingkungan, serta perkiraan jarak.
4. Mengenai hal teknis seperti titik blind spot (daerah yang tidak terpantau kamera) dan kecepatan respon pengaturan cahaya lampu, tidak termasuk objek yang diteliti. Lingkungan pengujian adalah kondisi jalan di Indonesia, khususnya Kabupaten Sleman pada saat hujan dan cerah. 5. Lampu kanan dan lampu kiri dikendalikan otomatis secara indepentdent.
Batas wilayah lampu kanan dan lampu kiri, serta batas wilayah pemrosesan (Cropping ROI) dilakukan berdasarkan hasil kalibrasi.
1.4 Tujuan dan Manfaat
Tujuan yang ingin dicapai dalam penelitian ini adalah meneliti pemrosesan citra dengan metode Hough Cir cle, pada sistem Automatic High Beam/ Low Beam dan Automatic Warning. Sistem ini bekerja dengan mendeteksi lampu depan kendaraan yang berwarna putih kekuningan kendaraan di dari arah yang berlawanan, kemudian mengatur lampu high beam/ low beam, serta mengatur peringatan saat kendaraan didepannya melakukan pengereman, berdasarkan cahaya merah lampu belakang kendaraan.
Manfaat dari penelitian ini adalah mengetahui tingkat keberhasilan pemrosesan citra pada mobil cerdas, dengan menggunakan prototype sederhana. Untuk dapat mencari tingkat akurasi terbaik, maka divariasikan beberapa parameter pada metode Hough Circle, untuk mendapatkan parameter untuk hasil akurasi deteksi objek terbaik untuk memperkirakan jarak objek, dan tingkat error yang rendah.
1.5 Metodologi Penelitian
Metodologi penelitian yang direncanakan dalam penelitian ini adalah sebagai berikut :
1. Dirumuskan masalah yang akan diajukan sebagai tema.
2. Dilakukan kajian dan pembelajaran lebih lanjut mengenai Sistem Purwarupa Pemrosesan Citra Sistem Kontrol Lampu Jauh Otomatis dengan metode sebagai berikut :
a) Studi literatur, dan konsultasi Dosen Pembimbing untuk mendapatkan pengetahuan tentang sistem.
b) Dibuat rancangan sistem meliputi spesifikasi teknis dan non teknis sistem tersebut. Dilakukan rancangan metode pengenalan polanya. c) Dilakukan analisa deteksi dengan asumsi jarak di lapangan,. Kemudian
4
BAB II
TINJAUAN PUSTAKA
Studi tentang penerapan teknologi Automatic High Beam/ Low Beam dan Automatic Warning, telah dilakukan oleh beberapa pakar di bidang Computer Vision danImage P rocessing. Hal ini dapat dilihat pada Tabel 2.1.
Pedersen (2007) dalam journalnya meneliti tentang pendeteksian tepi objek menggunakan Hough Transform Circular. Prinsip dari Hough Circle Transform ini adalah mendeteksi bagian tepi dari suatu objek, yang telah difilter dengan Canny Edge atau Sobel. Kemudian agar dapat mendeteksi tepian tersebut dengan baik maka terlebih dahulu dilakukan Smoothing/Blurring, untuk dapat menghilangkan noise di sekitar wilayah pendeteksian.Kemudian baru dilakukan deteksi tepi berbentuk lingkaran. Dengan transformasi Hough Circle didapatkan koordinat titik tengah dan jari-jari wilayah pendeteksian.
Malley, et.al (2011) dalam jurnalnya meneliti tentang pendeteksian lampu belakang mobil (Rear Light detection). Metode deteksi yang digunakan metode Kalman F iltering, dengan menggunakan setting pengambilan video low exposure. Tujuan dari pendeteksian video dengan low exposure adalah mengurangi noise (error deteksi) pada lingkungan. Sehinga mengurangi efek cahaya putih pada saat pendeteksian lampu belakang kendaraan bermotor. Setelah mendapat video dengan low exposure tersebut, maka nilai HSV yang didapatkan dari konversi HSV menjadi lebih akurat. Untuk klasifikasi, digunakan metode pendeteksian koordinat vertikal blob sejajar yang akan diidentifikasi sebagai blob lampu belakang mobil.
Alcantarilla, et.al. (2011) dalam jurnalnya meneliti tentang menggunakan Road Vertical Curvature Estimation, yakni menggunakan parameter koordinat vertikal dari blob sebagai tambahan parameter Support Vector Machine. Dengan metode tersebut dapat pemrosesan video dapat membedakan cahaya lampu depan dan lampu belakang mobil, dengan cahaya dari lingkungan lebih jauh lagi. Pada penelitian ini juga lebih baik untuk melakukan perkiraan jarak antara objek terdeteksi dengan titik nol pendeteksian.
Dari penelitian terdahulu yang diuraikan diatas, didapatkan banyak masukan dalam melakukan metode penelitian. Sepasang blob yang terdeteksi memang menandakan bahwa disitu juga ada mobil. Namun karena penelitian ini tidak dikhususkan untuk jalan kecepatan tinggi (Highway), maka sistem harus mampu mendeteksi motor yang hanya mempunyai satu lampu. Maka digunakan estimasi koordinat vertikal untuk membedakan cahaya lampu mobil dan motor, dengan lampu jalan. Maka dilakukan penelitian dengan mendeteksi pola warna dan koordinat dari lampu belakang mobil dan lampu depan mobil.
Untuk dapat mendeteksi wilayah pendeteksian dari suatu blob digunakan Transformasi Hough Circles. Pertimbangannya adalah bentuk r egion blob yang akan dideteksi, baik itu lampu depan kendaraan atau lampu belakang kendaraan, semua berbentuk menyerupai lingkaran. Sehingga didapatkan hasil pendeteksian titik tengah dan jari-jari wilayah pendeteksian. Dengan metode ini juga dimungkinkan untuk mendeteksi lebih dari satu objek lingkaran dari wilayah pendeteksian, sehingga mendukung penelitian ini.
Tabel 2.1 Studi tentang penerapan Automatic High Beam/ Low Beam dan
Automatic Warning
No. Nama Pengarang Tahun Keterangan
1 Pedersen 2007 - Konversi RGB ke HSV
- Memfilter tepian dengan menggunakan
Canny Edge atau Sobel.
- Dilakukan Smoothing Gauss, untuk mengurangi noise pada area
- Mendeteksi sepasang blob lampu depan mobil dengan metode SVM (Support Vector Machine).
- Melakukan perkiraan jarak berdasar koordinat titik tengah blob
3. Alcantarilla, et.al 2011 - Menambahkan klasifikasi fungsi koordinat vertikal pada metode SVM titik tengah blob untuk mendeteksi sepasang blob yang dimaksud - Mendeteksi lampu belakang mobil
menggunakan bantuan efek Low Explosure pada Kamera.
5. Rahadian 2013 - Konversi RG B ke HSV.
- Melakukan deteksi tepi Canny Edge, dan Smooting Gauss
- Deteksi blob dengan metode Hough Circle
- Melakukan filter berdasarkan ukuran jari-jari minimal dan maksimal, serta koordinat sumbu vertikal.
7
BAB III
LANDASAN TEORI
3.1 Prinsip IntellegentCarSystem
Dengan kemajuan teknologi yang semakin cepat maka pengembangan teknologi otomatisasi khususnya pada produk otomotif seperti mobil semakin baik. Khususnya pada mobil menengah keatas sudah banyak dikembangkan teknologi Intelligent Car System.
Intelligent Car System adalah teknologi yang memungkinkan mobil dapat mengenali situasi dan tanda-tanda yang ada di sekelilingnya untuk kemudian membuat suatu sistem yang dapat membantu pengemudi berkendara secara aman dan nyaman (Siddique, 2009). Termasuk diantaranya adalah dapat mendeteksi perilaku kendaraan disekitarnya.
Gambar 3.1 Model IntelligentCar (Henry, 2006)
Dengan kemajuan teknologi yang semakin cepat maka pengembangan teknologi otomatisasi khususnya pada produk otomotif seperti mobil semakin baik. Khususnya pada mobil menengah keatas sudah banyak dikembangkan teknologi Intelligent Car System. Intelligent Car System adalah teknologi yang memungkinkan mobil dapat mengenali situasi dan tanda-tanda yang ada di sekelilingnya untuk kemudian membuat suatu sistem yang dapat membantu pengemudi berkendara secara aman dan nyaman (Siddique, 2009). Termasuk diantaranya adalah dapat mendeteksi perilaku kendaraan disekitarnya
Gambar 3.2 Contoh Sistem kendali pada Intelligent Car (Henry, 2006)
Pada Gambar 3.2 digambarkan suatu contoh arsitektur Intelligent Car System. Kendati menggunakan sensor jarak untuk mendeteksi objek didepannya (pada penilitian digunakan kamera handycam), namun arsitektur diatas sama dengan sistem kendali pada mobil cerdas modern.
Gambar 3.3 Diagram kesalahan yang menyebabkan kecelakaan (Siddique , 2009)
Gambar 3.3 menunjukkan tentang rata-rata penyebab kecelakaan diantaranya adalah kecepatan tinggi, mengabaikan rambu-rambu lalu lintas, human error (kesalahan manusia) dan kerusakan teknis pada kendaraan (Siddique, 2009). Hal inilah yang melatarbelakangi pembuatan Smart Car/ Intelligent Car System.
3.1.1 Prinsip Automatic High Beam
Automatic High Beam adalah suatu teknologi dengan memanfaatkan pemrosesan citra dengan metode Object Recognition untuk mendeteksi object dan dengan bantuan Thresholding untuk mendeteksi gelap terang suatu citra. (Destefani, 2010). Hasil pemrosesan itu kemudian dikirim ke controller beam lamp, sehingga dapat menyesuaikan kondisi saat high beam dan low beam.
Gambar 3.4 Model Automatic High Beam milik RenaultSystem
(Destefani, 2010)
Salah satu penempatan kamera yang benar adalah dibelakang mirror dengan memanfaatkan bantuan dari cahaya lampu mobil. Maka dari itu cahaya yang dihasilkan lampu mobil juga harus dianalisa. Karena pencahayaan lampu Halogen dan lampu HID berbeda. Segmentasi citra antara lampu Halogen dan lampu HID ditunjukkan pada Gambar 3.5.
Gambar 3.5 Perbedaan Segmentasi Warna Lampu HID dengan
Pada Gambar 3.5 dijelaskan bahwa hasil substraksi warna dari lampu jenis HID, dan lampu jenis Ha logen berbeda. Oleh karena itu sebaiknya sensor High Beam Controller mampu mendeteksi keduanya sebagai target objek pendeteksian. Pengaturan pencahayaan lampu juga menyesuaikan dengan objek yang ada di depannya.
Pada Gambar 3.6 dijelaskan simulasi kejadian ketika ada kendaraan yang bergerak dengan arah yang berlawanan, maka intensitas cahaya lampu dari kendaraan tersebut akan dideteksi oleh kamera, kemudian lampu jauh (high beam) akan di ganti ke lampu dekat (low beam). Pada Gambar 3.6 dan Gambar 3.7 terlihat bahwa mobil berjalan di sebelah kanan, hal ini hanyalah suatu ilustrasi sistem karena gambar dari sumber (Hyunda i Corp.) menggunakan latar kondisi jalan di luar negeri. Objek yang akan diteliti, diuji dengan kondisi jalan di Indonesia yakni mobil berjalan di sebelah kiri (stir kanan pengemudi).
Gambar 3.6 Simulasi kontrol lampu jarak jauh otomatis (Hyundai, 2010)
a) Lampu High Beam akan aktif saat tidak ada kendaraan yang berjalan dari arah berlawanan.
b) Lampu High Beam akan switch ke Low Beam pada saat
terdeteksi objek dengan arah berlawanan dari pengendara
Gambar 3.7 Cara Kerja Pengendalian Lampu Jarak Jauh dan Dekat Otomatis (Hyundai, 2010)
3.1.2 Warningsystem
Auto Breaking Sytem adalah fitur pada kendaraan untuk mengurangi kecepatan, dan berhenti apabila didepannya ada suatu objek yang dekat. Biasanya sensor yang digunakan adalah ultra sonic dan kamera. (Carmild, 2012). Jika sensor adalah kamera, maka pengujian efektif dilakukan pada malam hari karena intensitas cahaya merah lampu belakang mobil/ motor sangat kuat.
Sistem Night Vision Automatic Breaking System ini akan dicoba untuk diaplikasikan untuk fitur warning system pada perangkat lunak yang akan dikembangkan. Untuk mengetahui kapan saat harus memperlambat kecepatan, dan kapan harus benar-benar berhenti.
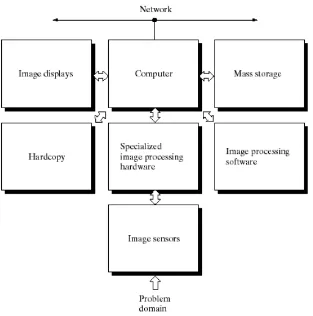
3.2 Metode Pemrosesan Citra dengan Pendeteksian Objek
Gambar 3.9 Pengolahan sinyal pada Citra Digital (Hu, 2002)
berjalan di atas sistem operasinya. Pengguna dapat memasu kkan kode-kode program yang dibutuhkan dalam pengolahan citra. Dengan bahasa pemrograman, penggu na dapat mengatur proses olah citra sesuai tujuan yang diharapkan
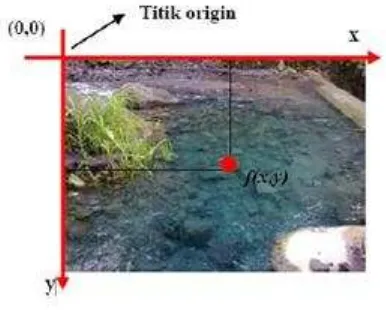
Citra digital direpresentasikan sebagai suatu matriks data atau fungsi f (x,y), yang terdiri dari M baris dan N kolom, ilustrasinya terlihat pada Persamaan (3.1) tentang persaman matriks citra digital. Tiap elemen dari matriks citra digital, yang dinotasikan dengan koordinat pasangan baris dan kolom disebut pixel (picture element), dimana x dan y adalah koordinat spasialnya sedangkan f (x,y) adalah nilai intensitas citra pada koordinat tersebut (Gonzales and Woods, 2008). Persamaan matrik citra digital 2 Dimensi f (x,y) ditunjukkan dalam Persamaan (3.1).
, =
(0,0) (1,0)
… …. ( −1,0)
(0,1) (1,1)
……. ( −1,1)
… ….
… ….
… …. .
… ….
(0, −1) (1, −1)
… … …
( −1, −1)
...(3.1)
Ilustrasi citra pada koordinat x, y pada gambar sesungguhnya ditunjukkan oleh Gambar 3.10.
3.2.1 Deteksi Warna RGB dan HSV
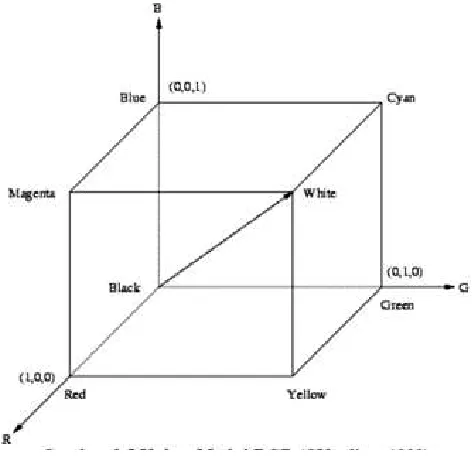
RGB (Red, Green, Blue) adalah citra pada gambar terdiri dari tiga pola citra independen, satu di masing- masing warna primer: merah, hijau dan biru. Komposisi warna tertentu adalah dengan menentukan jumlah dari masing- masing komponen utama. Pada Gambar 3.11 ditunjukkan tentang geometri dari model warna RGB untuk menentukan warna dengan menggunakan sistem koordinat Cartesian. Spektrum Greyscale, yaitu warna-warna yang terbuat dari jumlah yang sama dari masing- masing primer, terletak pada garis yang menghubungkan simpul hitam dan putih.
Gambar 3.11 Kubus Model RGB (Hu, 2002)
dan warna pada derajat Hue, dan Gambar 3.12 tentang Diagram model warna HSV dalam bentuk kerucut.
Tabel 3.1 Nilai sudut dan warna pada Hue(Hu, 2002)
Sudut ˚ Warna
0-60 Merah
60-120 Kuning
120- 180 Hijau
180- 240 Cyan
240- 300 Biru
300- 360 Magenta Gambar 3.12 Kerucut HSV,
(Sequin, 2011)
Pada Gambar 3.12 dijelaskan konsep Sa tura tion mengindikasikan ra nge/batas dari tingkat keabu-abuan dalam ruang warna/color spa ce. Yaitu dari nilai 0-255(Gra ysca le), Jadi ada keadaan abu-abu antara nilai 0 dan 1. Sa tura tion akan jadi ukuran operasi threshold pada penelitian ini. Va lue adalah tingkat kecerahan (brightness) dari warna dan nilainya bervariasi dan berhubungan dengan sa tura tion. Nilainya berkisar dari dari 0-100%. Saat 0 nilainya hitam total, dengan peningkatan nilai va lue maka tingkat kecerahannya bertambah. Kelebihan model HSV adalah karena mendekati warna yang dirasa indra manusia, sehingga sering digunakan dalam pengolahan citra terutama pendeteksian suatu objek dengan warna tertentu.
3.2.2 Thresholding
tersebut, sedang nilai thresholding lain diabaikan (Bradski and Kaehler, 2008). Contoh hasil thresholding adalah pada Gambar 3.13.
Gambar 3.13 Contoh hasil thresholding (Bradski and Kaehler, 2008)
3.2.3 Smoothing
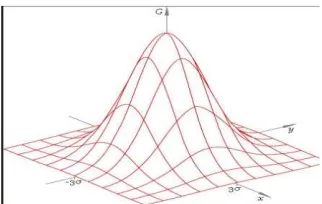
Smoothing atau sering disebut blurring, adalah metode untuk mengkaburkan objek. Tujuannya adalah untuk mengurangi noise, sehingga mempermudah pemrosesan citra, terutatma proses pendeteksian tepi. Hal ini karena proses smoothing dapat menghaluskan/ menyatukan bagian citra yang terpisah (Hu,2002). Hal ini terlihat seperti pada Gambar 3.14.
Gambar 3.14 Contoh hasil Gaussian Smoothing (Hu, 2002)
� = −� 2 2�2,
ℎ = 2�.� −2�2�2 2
…… … … …… … …… … …… … …… … ….……(3.2)
Pada Persamaaan (3.2) terdapat persamaan H(u) yang berupa persamaan citra, dan persamaan h(x) yang berupa hasil smoothing dengan 1 Dimensi. Terlihat bahwa hasil smoothing adalah seperti low pass filter (Hu, 2002). Grafik median dari kedua persamaan ini terlihat pada Gambar 3.15.
(a) Hasil dari transformasi H(u), citra awal
(b) Hasil setelah di smoothing, h(x).
Gambar 3.15 Hasil dari transformasi Gaussian Blur
1 Dimensi (Hu, 2002)
Pada persamaan smoothing yang digunakan pada penelitian ini adalah 2 dimensi . Persamaaan ini tertulis pada Persamaaan (3.3 a). Nilai �, pada OpenCV berasal dari Persamaan (3.3 b), n adalah parameter 1 untuk kernel horizontal atau parameter 2 untuk kernel vertikal. Kernel adalah matriks yang digunakan untuk proses konvolusi (OpenCV, 2012). Hasil grafik median dari persamaan s moothing 2D, dicontohkan pada Gambar 3.16.
, = 2�.� −2�2�2( 2+ 2)… …… … …… … … …… … …… ….…… … …...(3.3 a) �= 0,3
Gambar 3.16 Hasil dari transformasi Gaussian Blur 2 D (Huu, 2002)
3.2.4 Ope rasi Sobel
Operasi Sobel dilakukan untuk menghitung perbedaan gradient warna intensitas gelap dan terang dari suatu pixel bertetanggaan (matriks) (Huu,2002). Mekanismenya adalah dengan melakukan konvolusi antara citra asli dengan kernel Sobel 3x3, 2 Dimensi x dan y. Matriks kernel tersebut yakni ditunjukkan pada matriks pada Persamaan 3.4. Matriks untuk Gradasi X ditunjukka n pada Persamaan (3.4 a), Gradasi Y ditunjukkan pada Persamaan (3.4 b) , total Gradasi ditunjukkan pada Persamaan (3.4 c). Hasil Operasi Sobel ditunjukkan pada Gambar 3.17.
�
=
− +
− +
− …… … …
. .… … ….… … … …… … …… … …… … … …. . . .
� =
− − −
+ + +
∗ �… … …… … … …… … …… … …… … … ……. .….… .
�
Gambar 3.17 Hasil Operasi Sobel (OpenCV, 2012)
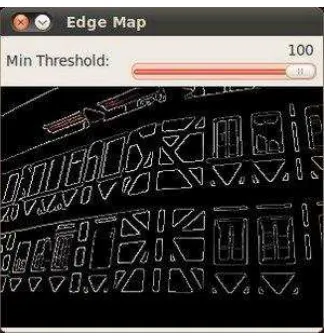
3.2.5 Ope rasi Deteksi Tepi Canny
Operasi Canny Threshold dilakukan sebagai tindak lanjut dari operasi sobel. Dengan operasi canny didapatkan nilai tepian dari suatu objek. Dengan kata lain operasi canny akan membinerisasikan nilai threshold yang dianggap tepian objek. Metode pada Canny adalah dengan Hyster isis Threshold. Dengan proses tersebut deteksi tepi adalah pixel tingkat keabuannya lebih dari atau sama dengan threshold atas, sedangkan pixel dengan tingkat keabuan lebih dari threshold bawah, yang sama terhubung dengan pixel yang dianggap tepian objek (lebih besar dari threshold atas) maka akan dianggap sebagai tepian objek. Hal ini untuk menghubungkan tepian objek yang mungkin tidak memiliki gradasi yang sama tinggi dengan tepian lain (OpenCV, 2012). Ilustrasi deteksi dengan dua nilai threshold dan satu nilai threshold ditunjukkan pada Gambar 3.18. Contoh hasil deteksi tepian Canny pada citra ditunjukkan pada Gambar 3.19.
(a) Hasil Operasi dengan threshold tunggal
(b) Hasil Operasi dengan threshold tinggi dan rendah Gambar 3.18 Hasil deteksi tepian dengan (a) threshold tunggal (b) threshold
Gambar 3.19 Hasil deteksi tepian Canny (OpenCV, 2012)
3.2.6 Hough Circle Transform
Persamaan Hough adalah salah satu persamaan untuk merepresentasikan Kontur (countour). Kontur adalah salah satu bentuk deteksi tepi, deteksi ini bisa merepresentasikan batas dari suatu daerah (boundary r egion) atau suatu bentuk. Maka dari itu didapatkan persamaan-persamaan untuk dapat merepresentasikan bentuk tersebut (Munir, 2004). Salah satunya adalah Hough Circle Detection.
Gambar 3.20 Proses mendeteksi lingkaran dengan Hough Circle Transform
(Munir, 2004)
(3.5) dijelaskan tentang bagaimana melakukan perhitungan untuk dapat mencari titik a, b, dan r (jar i-jari). Persamaannya adalah sebagai berikut :
�− 2+ �− 2= ;…… … …… … … …… … …… … …… … …… … …. (3.5 )
� = + ∅; = �− ∅……….…...……(3.5 b)
� = + � ∅; = �− � ∅………...….……(3.5 c)
= �−
∅ ; = � −
sin∅, ………...………(3.5 d)
Transformasi lingkaran ditunjukkan pada Persamaan(3.5a), kemudian diubah dalam bentuk perkalian sudut untuk dapat mencari jari-jari berdasarkan titik tengah (a,b) dan tepian (x,y), perkalian sudut ini ditunjukkkan pada Persamaan (3.5b) dan Persamaan (3.5c). Maka untuk mencari besar jari- jari lingkaran dapat diperoleh pada bentuk Persamaan (3.5d).
OpenCV memiliki library untuk deteksi Hough Transform. Metode yang digunakan sama dengan Hough C ircle Transform sederhana, hanya metodenya sudah dioptimasi, dengan tidak menghilangkan ciri Hough Transform yakni deteksi koordinat titik tengah (a,b) serta jari-jari lingkaran (r) (OpenCV, 2012). Ilustrasi deteksi lingkaran ditunjukkan pada Gambar 3.21.
Gambar 3.21 Hasil pendeteksian citra dengan Hough Circle Transform
(OpenCV, 2012)
pada sub bab 6.1.2 tentang penjelasan parameter Hough Circle, dan sub bab 6.1.3 tentang kalibrasi parameter Hough Circle.
3.2.7 OpenCV
OpenCV (Open Source Computer Vision) adalah libra ry / pustaka fungsi pemrograman untuk pemrosesan waktu nyata pada computer vision. OpenCV dirilis dibawah lisensi BSD, gratis untuk digunakan untuk kegunaan akademis maupun untuk fungsi komersial. Menggunakan antarmuka C+ + , C dan Python, juga J a va . OpenCV adalah library Open Source untuk Computer Vision untuk C/C+ + , OpenCV didesain untuk aplikasi rea l-time, memiliki fungsi- fungsi akuisisi yang baik untuk image/video (Huaman, 2012). Libra ry ini dapat berjalan pada sistem operasi Windows, Linux maupun Ma c.
Feature yang dimiliki OpenCV antara lain :
a) Citra dan video I/O (file dan kamera based input, image/video file output).
b) Manipulasi Matriks dan Vektor beserta rutin-rutin aljabar linear (products, solvers, eigenvalues, SVD).
c) Pemroses Citra fundamental (filtering, edge detection, corner detection, sampling and interpolation, color conversion, morphologica l oper ations,
histograms, image pyramids).
d) Kalibrasi kamera (ca libration patterns, estimasi fundamental matrix, estimasi homography, stereo correspondence).
e) Analisis gerakan (optica l flow, segmentation, tracking).
f) Graphical User Interface (display image/video, penanganan keyboard dan mouse handling, scroll-bars).
g) Pelabelan citra (line, conic, polygon, text drawing).
OpenCV terdiri dari 3 library, yaitu:
a) CV : untuk algoritma Image processing dan Vision. b) Highgui :untuk GUI, Image dan Video I/O.
24
BAB IV
METODE PENELITIAN
4.1 Bahan
Pada Gambar 4.1 ditampilkan hasil capture video dari dalam mobil dengan menggunakan handycam. Bahan yang digunakan adalah video hasil pengambilan gambar di lokasi. Video tersebut merupakan gambaran dari keadaan hasil camera yang terletak di dalam mobil (dibelakang mirror tengah).
Gambar 4.1 Hasil capture video dari dalam mobil
4.2 Peralatan
Pengembangan software membutuhkan perangkat keras dan perangkat lunak. Sebagai langkah awal, direncanakan untuk menggunakan beberapa instrumentasi yang akan diuraikan, pada sub bab peralatan. Peralatan yang digunakan adalah sebagai berikut :
a. Handycam Sonny Hybrid HDR-CX110E
Gambar 4.2 Kame ra Sonny Hybrid HDR-CX110E
b. Tripod Handycam
Tripod adalah alat untuk mendukung posisi handycam yang benar tegak dan terukur, lengkap dengan waterpas untuk menentukan kedudukan datar camera. Pada tripod diset tinggi sebesar 150 cm, untuk mempurwarupakan setting camera pada ketinggian mirror tengah mobil Nissan Terrano.
c. Tali Rafia
Tali rafia yang dimaksud disini bukan sembarang tali rafia. Namun tali rafia yang sudah diukur per 10 meter. Untuk mendapatkan nilai 10 meter diukur dengan menggunakan bantuan ubin, dimana ubin berukuran 30x30 cm. Berarti untuk mendapatkan panjang 10 meter, perlu dibentangkan tegak lurus pada ubin sebanyak 34 ubin.
Tali rafia ini akan digunakan untuk membantu menset jarak kalibrasi untuk membuat titik point per 10 meter dimulai dari titik nol.
d. Kalibrator Model
Kalibrator model adalah model kendaraan yang digunakan untuk mengkalibrasi hasil dari kamera berdasarkan jarak yang sudah ditentukan, dan untuk meminimalisir error. Berikut adalah kendaraan dan spesifikasinya yang digunakan untuk mengkalibrasi pendeteksian pola warna.
Tabel 4.1 Kebutuhan mobil model kalibrator
Merek Nissan Terrano
Type Jeep
Lebar Kendaraan 145 cm
Tinggi Lampu Depan 80 cm
Tinggi Lampu Belakang 82 cm
Tinggi Spion Tengah 150 cm
Tabel 4.2 Kebutuhan motor model kalibrator
Merek Honda Revo
Lebar 40 cm
Tinggi Lampu Depan 110 cm
Tinggi Lampu Belakang 82 cm
e. Software OpenCV
Digunakan Software OpenCV untuk komputasi pemodelan sistem ini, karena OpenCV adalah perangkat lunak khusus untuk mengolah citra, dan kelebihannya adalah ringan. Kelebihan OpenCV dibanding peralatan yang lain telah disebutkan pada dasar teori.
f. Pemroses Video.
4.3 Prosedur Kerja dan Pengumpulan Data
1. Dilakukan studi literatur mengenai metode apa saja yang dibutuhkan untuk pemrosesan video.
2. Dilakukan pengambilan gambar video di lapangan, untuk mempermudah penelitian.
3. Dilakukan penelitian pemrosesan video dengan metode yang akan digunakan yakni pendeteksiaan warna, ukuran minimal pendeteksian, dan koordinat.
4. Dilakukan uji algoritma dan analisa d ata.
5. Dilakukan implementasi pada purwarupa sistem. 6. Dibuat laporan hasil penelitian berupa skripsi.
4.4 Analisis dan Rancangan Sistem
Berikut ini adalah rancangan sistem dan kebutuhan pembuatan sistem:
4.4.1 Analisis kebutuhan fungsiomal
Analisis kebutuhan fungsional adalah sistem standar yang direkomendasikan untuk menjalankan sistem ini. Analisis tersebut meliputi pemrosesan video, kontrol dan aktuator.
Analisis kebutuhan pemroses video (hardware)
Hardware pemroses video berupa laptop/ computer standar. Karena masih dalam tahap penelitian dengan menggunakan prototype. Detail spesifikasi tentang pemroses video yang digunakan ditunjukkan dalam Tabel 4.3.
Tabel 4.3 Kebutuhan hardware pemroses video Model CPU Core 2 Duo Intel Processor
Memori 2 GB Ram DDR2
Platform Platform Linux Ubuntu Penyimpanan 160 Gb
Sesuai pada Tabel 4.3 penelitian akan dilaksanakan pada platform Intel P rocessor Core 2 Duo, dengan 2 GB Ram DDR2, dan hardisk 160 GB. Demi kebebasan, dan keringanan pemrosesan, digunakan sistem operasi Linux Ubuntu. Karena lebih ringan dan kecil ukurannya dibanding sistem operasi yang lain.
Analisis kebutuhan pemroses video (software).
Untuk kebutuhan pemroses video, digunakan framework Opencv 2.4.2. untuk Linux, kemudian menggunkaan compiler C/C++ pada penelitian ini. compiler GCC terbaru. Kebutuhan tersebut ditunjukkan pada Tabel 4.4.
Tabel 4.4 Kebutuhan software pe mroses video Framework OpenCV 2.4.2.
Compiler C/C++
Codec V4Lan (Video Lan for Linux), dan FFMPEG 0.8x Penyimpanan 160 Gb
Display Standar
Untuk video codec, kebutuan OpenCV Linux versi 2.4.2 adalah V4Lan dan FFMPEG 0.8x. Untuk displa y, digunakan layar laptop standart.
Analisis kebutuhan sensor
Kebutuhan Sensor dibawah ini adalah video kamera/ Handycam Sonny Hybrid HDR-CX110E untuk menghasilkan video. Spesifikasi tersebut dapat dilihat pada Tabel 4.5.
Tabel 4.5 Setting sensor Handycam Sonny Hybrid HDR-CX110E
Resolusi Sensor 3 Mega Pixels
Setting Fokus Manual
Setting Exposure Automatic
Kecepatan Shutter 50 FPS
Pada Tabel 4.5 disebutkan resolusi video adalah 1920x1080 (HD) /60p (PS), dan besarnnya kecepatan shutter 50 FPS (kamera mampu merekam gambar 50 frame per detik), Dengan terlalu besar ukuran video dan tingkat fps dari video kamera ,untuk di proses dengan software pengolah citra OpenCV. Maka dari itu pada penelitian ini dilakukan dengan software Video Converter F ormat F actory. Hasil konversi dengan menggunakan software F ormat F actory ditunjukkan pada Tabel 4.6.
Tabel 4.6 Hasil Konversi dengan software F ormat F actory
Kebutuhan Gambar/ Video
Resolusi Pada Penelitian ini 640x480
FPS 15 FPS
Untuk memudahkan kan pemrosesan video, output resolusi pada penelitian ini digunakan 640x480 pixel, dengan tingkat frame rate sebesar 15 FPS (F rame per second), karena pemrosesan pada video dengan OpenCV adalah dengan memroses tiap frame video yang masuk, sehingga harus dibatasi supaya tidak terlalu berat.
Analisis kebutuhan aktuator
Spesifikasi untuk kebutuhan aktuator pada penelitian ini adalah system Arduino Mega 2560, spesifikasi sistem ditunjukkan pada Tabel 4.7. Modul sistem ditambahkan dengan tambahan modul relay Shield dan dua aktuaor servo., dan lampu led, sebagai purwarupa sistem Spesifikasi tersebut dapat dilihat pada Tabel 4.8.
Tabel 4.7 Tabel spesifikasi kontroller Arduino Mega 2560
Mikrokontroller AtMega 128
Clock 16Mhz
Bootloader Arduino
Tabel 4.8 Tabel spesifikasi aktuator
Relay Arduino Relay Shield , 4 Relays
Servo 12 KG , 180 Degrees, 2 buah
Lampu LED Superbright Hijau (Low Beam)
Kapasitas ROM LED Superbright Biru (High Beam)
4.4.2 Analisis kebutuhan non fungsional
Analisis kebutuhan non fungsional adalah kebutuhan sistem diluar kebutuhan detail teknis, namun harus dipenuhi untuk berjalan baiknya suatu sistem. Kebutuhan non fungsional untuk sistem ini ditunjukkan pada Tabel 4.9.
Tabel 4.9 Kebutuhan non fungsional warna) lampu depan dan lampu belakang dengan
Hough Circle.
Kebutuhan Jarak Pendeteksian
Mampu mendeteksi dan mengintepretasi pendeteksian dengan estimasi jarak real objek berdasarkan tinggi sumbu vertikal centroid dan tingkat thresholding.
Kebutuhan pemrosesan
Mampu memroses main frame dan mampu memproses beberapa frame untuk kebutuhan pemrosesan.
Pada Tabel 4.9 diterangkan dengan kebutuhan non fungsional. Digunakan resolusi video 640x480 dan 15 fps untuk menjalankan main frame. Untuk fungsi deteksi Hough C ircle, maka harus mampu mendeteksi colorspace lampu depan dan lampu belakang Hough C ircle.
4.5 Rancangan Penelitian
Gambar 4.3 Diagram proses segmentasi citra
Proses pengolahan citra yakni segmentasi objek untuk memisahkan objek dengan lingkungan secara umum dijelaskan pada diagram pada Gambar 4.3. Pada Gambar 4.3 secara umum dijelaskan proses pengolahan citra secara jelas dari citra asli RGB 8 bit 3 channel, kemudian dikonversi ke bentuk HSV untuk mengurangi nois error akibat perubahan intensitas cahaya dengan frame HSV 8 bit 3 channel. Frame tersebut di filter dengan spasi warna (color space) untuk memisahkan objek dengan lingkungan. Dilakukan Filter Gaussian Blur untuk mengurangi nois untuk deteksi tepi.
Sementara tengah dan luar objek adalah 0. Pada tepi objek inilah dilakukan ekstraksi fitur Hough Transform untuk mencari bentuk lingkaran. Kemudian hasil Transformasi Hough C ircle adalah mendapatkan titik tengah (a,b) dan radius objek terdeteksi.
4.5.2. Rancangan diagram blok sistem
Pada rancangan sistem, kendali dilakukan oleh feedback dari proses pengolahan citra yakni perkiraan jarak. Perkiraan jarak ini yang akan dijadikan acuan untuk sistem melakukan koreksi pengendalian intensitas cahaya lampu dan koreksi pemberian peringatan. Proses kendali pada lampu jauh ditunjukkan pada Gambar 4.3 (a). Pada diagram blok sistem lampu jauh otomatis sudah jelas dipaparkan koreksi pencahayaan dilakukan dengan kontrol servo apakah naik atau turun dan kendali lampu apakah lampu jauh dan lampu dekat. Posisi servo untuk menaikkan lampu pendek sedikit demi sedikit, karena didepan ada objek pada jarak yang cukup jauh, atau intensitas cahayanya rendah.
Set Point
Gambar 4.4 Diagram blok kendali sistem (a) diagram lampu jauh otomatis, (b) diagram blok sistem peringatan otomatis
parameternya adalah 3 peringatan, yakni deteksi depan kendaraan (mendeteksi lampu belakang kendaraan pada jarak jauh), hati- hati (mendeteksi lampu belakang kendaraan pada jarak sekitar 40-50 meter) dan kondisi REM (mendeteksi intensitas lampu belakang kendaraan saat mengerem/ intensitas tinggi pada jarak kurang dari 30 meter).
4.5.3 Rancangan sistem pengenalan objek secara umum
Sistem ini menggunakan sumber video yang mengambil citra pola berupa cahaya yang datang dari lampu berlawanan arah atau lampu belakang dari kendaraan, maka dilakukan deteksi objek berdasarkan pola warna. Rancangan sistem secara umum ditunjukkan pada Gambar 4.5.
Input frame
Kita memulai pada blok pertama, yang berisi masukan frame dan cropping, hasil cropping tersebut kemudian dimasukkan kepada ukuran frame yang sesuai. Frame tersebut kemudian masuk ke dalam preproscessing konversi RGB ke HSV. Pada proses ini, digunakan untuk mendeteksi warna dengan membatasi colorspace (jangkauan warna) pada tiap frame deteksi lampu depan (cahaya putih) dan deteksi lampu belakang (cahaya merah). Kemudian tiap frame HSV deteksi lampu depan dan lampu belakang, dicari titik centroid (x,y) dan radius lingkaran untuk tiap frame. Kemudian dilakukan duplikasi frame untuk menyiapkan frame dengan threshold frame yang berbeda-beda untuk mendukung proses interpretasi program.
Setelah didapatkan duplikasi frame HSV pada deteksi lampu belakang dan lampu depan. Deteksi Hough Circles dapat dilakukan pada tiap-tiap frame hasil pendeteksian. Hough Circles mempunyai beberapa parameter pendeteksian, akan dijelaskan pada sub bab 6.2. Salah satu parameter yang digunakan yakni parameter canny threshold, yakni filter threshold dengan nilai maksimal dan minimal. Maka yang divariasikan adalah nilai minimalnya. Cahaya/warna dengan intensitas rendah hanya bisa menembus threshold rendah. Begitu juga jika intensitas/ nilai tinggi vertikal maka dapat menembus threshold tinggi. Setelah objek terdeteksi ada 3 parameter yang akan didapat yakni koordinat vertikal dan horizontal centroid, titik tengah lingkaran, dan radius lingkaran. Koordinat vertikal centroid inilah yang akan digunakan sebagai parameter, disamping paramter tingkat threshold.
4.5.2 Rancangan sistem secara spesifik
Berikut adalah rancangan sistem secara spesifik. Video yang ditangkap oleh Camera, atau berupa file, akan dicapture tiap frame. Kemudian rancangan sistem yang akan dituliskan disini ada 3 macam yakni rancangan sistem saat menduplikasi frame, deteksi algoritma pada frame putih/lampu depan, dan deteksi pada frame merah/ lampu belakang. Berikut adalah penjelasannya.
Rancangan sistem input fra me, cropping , preprocessing, dan duplikasi frame. Berikut ini adalah rancangan frame pada saat menduplikasi frame, ditampilkan pada Gambar 4.4. Input video sengaja ada 3 video, duplikasi dengan frame 640x480 terlalu besar sehingga berakibat er ror.
Start
Pada Gambar 4.4 dijelaskan main frame dipotong menjadi wilayah yang lebh kecil yang penting pada pemrosesan, wilayah ini biasa disebut ROI (Region of Interest). Pada karena lampu mobil ada 2 yakni kiri dan kanan, maka wilayah ROI ini dibelah lagi menjadi 2. Wilayah sebelah kanan dipotong frame nya dan diberi nama frame kanan yang berukuran 290x140, dan wilayah sebelah kiri diberi nama frame kiri yang berukuran 250x140.
Ukuran frame disesuaikan pada frame 290x140 untuk frame kanan, dan 250x140 untuk frame kiri, berasal dari hasil kalibrasi. Untuk lebih jelas tentang pembatasan ROI telah dijelaskan pada sub bab 5.7. Angka ini berasal dari hasil kalibrasi dimana nilai maksimal deteksi pada jarak 90 m adalah sekitar 130. Maka ditambah dengan 10 pixels untuk toleransi, maka didapatkan 140. Kemudian untuk nilai horizontal juga didapatkan dari hasil kalibrasi pada titik 90 m pada titik x=250, maka sisa frame kanan adalah 290.
File input video kanan dan kiri adalah berukuran 640x480, kemudian supaya masuk pada frame yang telah dibuat maka main frame harus dipotong (cr opping ), untuk membatasi wilayah pemrosesan fungsi ROI untuk. Sebagai contoh dilakukan fungsi SetImageROI (100, 220, 250, 140), itu artinya bahwa ROI terbentang pada wilayah horizontal 100 ditambah 250 pixels, berarti sampai koordinat 350, kemudian 220 ditambah 140 pixels berarti 360 pixels. Itu berarti ROI frame kiri antara (100, 220) sampai (350, 360).
Main Frame hanyalah digunakan sebagai penampil Garis ROI dan lingkaran deteksi sekuensial. Oleh karena itu fungsi yang ada pada main frame adalah fungsi drawing saja sebagai penanda objek yang terdeteksi pada masing- masing deteksi frame.
F rame kanan dan frame kiri mempunyai proses yang sama, karena keduanya dibentuk hanya untuk membatasi ROI, supaya lampu kanan dan lampu kiri mempunyai kontrol secara indepentdent, sehingga bisa menyerupai model fitur pada mobil canggih.
warna cahaya lampu depan, dan frame merah untuk mendeteksi skala warna cahaya lampu belakang. P r eprocessing lampu depan menghasilkan frame thres10, kemudian preprocessing lampu depan menghasilkan frame hati- hati.
Kemudian dilakukan proses duplikasi frame dengan menggunakan fungsi Cloning F rames. Maka segera didapatkan frame untuk proses thresholding 20, 30, 40, 50 dari frame thres10, dan untuk frame proses deteksi depan, dan rem dari basis frame hati- hati.
Rancangan sistem saat Deteksi Lampu Depan dan aktuasinya.
Pada gambar 4.4. didapatkan bahwa diagram alir saat deteksi lampu depan dimulai dari ke 5 frame. Masing- masing frame melakukan deteksi objek dan deteksi sequensial. Deteksi objek meliputi skala threshold minimal pada setiap frame, seperti terlihat jelas pada gambar diagram alir ini.
Tres10 Tres20 Tres30 Tres40 Tres50