C. 138
Rancang Bangun Sistem Kontrol Dan Monitoring Pengereman Dinamis Motor Satu Fasa Berbasis Internet of Things (IoT)
Ilham Rianto, Moh. Jauhari*, Ahmad Mustofa
Teknik Listrik Industri, Politeknik Negeri Madura Jl. Raya Taddan Km. 4 Taddan,Camplong, Sampang, 69281
*E-mail: [email protected] Abstrak
Peralatan pada industri motor induksi banyak digunakan sebagai penggerak utama pada mesin, Untuk melakukan pengereman, pada motor induksi umumnya dilakukan secara manual dengan menekan tombol pada kontroler motor sehingga operator harus mengoperasikan dari jarak dekat. Saat terjadi gangguan dalam proses produksi maka pengereman dilakukan dari jarak yang aman sehingga dapat meminimalisir terjadinya kecelakaan yang melibatkan operator mesin. Paper ini menjelaskan pengereman motor induksi satu fasa menggunakan metode pengereman dinamis dengan Injeksi DC pada kumparan stator motor, alat ini juga menggunakan Internet of Things
(IoT) pada smartphone atau komputer yang terhubung dengan kontroler arduino sehingga motor dapat dikendalikan oleh operator dari jarak jauh. Dari hasil pengujian alat ini dengan menggunakan 4 variasi pengereman dapat dibuat alat bahwa semakin besar yang diinjeksikan maka waktu yang dibutuhkan untuk pengereman semakin cepat.
.
Kata Kunci:Motor Induksi, Kontrol Motor, Pengereman Dinamik, Internet of Things (IoT).
PENDAHULUAN
Pada era sekarang ini perkembangan teknologi sangat pesat khususnya dalam bidang
engineering. Hal ini didukung dengan peralatan kontrol yang menggunakan teknologi canggih dan efisien sehingga dapat mempermudah suatu pekerjaan contohnya pada industri yang menggunakan motor-motor listrik dalam produksinya. motor listrik banyak digunakan di dunia industri salah satunya untuk mengendalikan alat seperti konveyor, crane, blower
dan lain-lain. Kebanyakan Motor listrik yang digunakan ialah motor induksi, hal ini dikarenakan karakteristik dari motor induksi tersebut mempunyai konstruksi yang kuat, harga yang relatif murah dengan keandalan tinggi, dan pengoperasiannya mudah. Motor induksi memerlukan pengontrolan untuk mengatur kecepatan putar dan mengatur pengeremannya.
Prosiding Seminar Nasional NCIET Vol.1 (2020) C138-C144 1st National Conference of Industry, Engineering and Technology 2020,
C. 139
Pengereman putaran motor induksi juga dapat dilakukan secara dinamis dengan cara menginjeksikan arus searah pada kumparan stator. Dengan menginjeksikan arus searah pada kumparan stator maka akan timbul medan magnetik yang berputar melawan putaran rotor, sehingga menimbulkan pengereman. Pengereman secara dinamis menghasilkan pengereman yang halus dan hampir tidak menimbulkan kerugian mekanis. Dalam pengereman dinamis, lama waktu pengereman ditentukan oleh nilai arus searah yang diinjeksikan kedalam kumparan stator, waktu penginjeksian dan kapasitas beban motor.
Namun selain memiliki keuntungan motor induksi juga memiliki kekurangan pada pengeremannya sehingga dibutuhkan kontrol pengereman yang baik pada motor Pada realitanya pengendalian pengereman motor masih dilakukan secara manual dengan menekan tombol pada kontroler motor. Hal ini mengharuskan operator pada saat mengoperasikannya dari jarak dekat, sehingga kurang efektif dan aman. Diperlukan suatu kontroler yang dapat mengendalikan motor dari jarak optimal. Ada beberapa jenis pengereman motor, salah satunya yaitu pengereman dinamis dengan memberikan Injek Dc pada kumparan motor yang di mana dapat dilakukan dengan cara jarak jauh menggunakan Internet Of Things (IOT).
Sehingga dalam melakukan kontrol pengereman operator dapat melakukannya dalam jarak yang jauh dengan menggunakan pesan. Berdasarkan dari uraian diatas, peneliti membuat perancangan dan implementasi Sistem Kontrol dan Monitoring Pengereman Dinamis Motor Induksi Satu Fasa Berbasis Internet Of Things (IoT).
METODE PENELITIAN
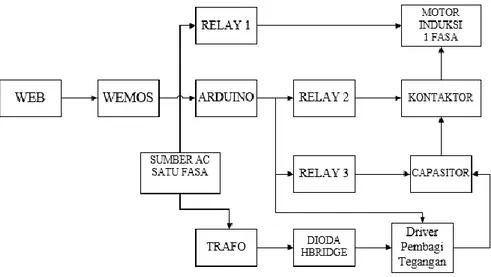
Perancangan alat ini menyangkut beberapa aspek. Aspek yang utama yaitu sistem harus jelas. Sistem yang digunakan dalam suatu alat harus dirancang dengan baik sehingga hasil kerja dari suatu alat tersebut baik. Untuk mendapatkan hasil yang baik harus diperhatikan setiap komponen yang digunakan dan harus bekerja sesuai fungsinya. Blok diagram sistem alat ini ditunjukkan pada Gambar 1.
Berikut ini merupakan komponen yang digunakan pada penelitian ini:
1. Rangkaian relay pemutus supply daya satu fasa, digunakan untuk memutus sumber pada motor induksi satu fasa.
2. Rangkaian tahanan variasi arus DC, digunakan untuk memvariasikan arus DC yang akan diinjeksikan pada motor.
3. Trafo step down, digunakan untuk menurunkan tegangan sumber satu fasa sebelum disearahkan.
C. 140
4. Rangkaian penyearah satu fasa gelombang penuh, digunakan untuk menyearahkan sumber satu fasa menjadi sumber DC untuk diinjeksikan.
5. Arduino Mega 2560, digunakan untuk mengolah perintah berupa data informasi dan memberi trigger ke perangkat keras yang telah diperintahkan.
6. Wemos D1 mini, digunakan sebagai penghubung internet antara arduino ke smartphone atau komputer.
7. Capasitor, digunakan untuk menyimpan energi dalam bentuk tegangan.
Gambar 1. Blok Diagram Sistem
Perangkat keras dalam penelitian ini berfungsi sebagai pengeksekusi perintah dari
smartphone atau komputer yang dikirim melalui komunikasi dengan Wemos D1 mini. Modul Wemos D1 mini akan mengirim perintah berupa data informasi dari smartphone atau komputer yang diteruskan ke mikrokontroler arduino mega 2560. Mikrokontroler arduino mega 2560 akan memberi trigger berupa tegangan (Vcc) untuk mengaktifkan relay. Saat mikrokontroler mendapat perintah untuk pengereman, maka mikrokontroler akan memutus kontaktor motor sehingga daya satu fasa motor akan terputus dan akan mengaktifkan relay
pengereman dan arus DC akan diinjeksikan pada motor. Arus DC pada pengereman dinamis dihasilkan dari sumber satu fasa yang tegangannya diturunkan terlebih dahulu dengan menggunakan trafo step down lalu disearahkan menggunakan penyearah satu fasa gelombang penuh.
Gambar 2 merupakan rangkaian pengereman dinamis dimana menginjeksikan DC pada belitan motor. Dimana mikrokontroler diberi tegangan 5 volt menggunakan power supply, mikrokontroler sebagai pengoperasian rtigalay satu untuk menghidupkan dan mematikan
C. 141
motor, relay dua digunakan untuk membeka dan menutup kontaktor saat pengereman dan
relay tiga untuk ngecass kapasitor. Arus DC dihasilkan dari sumber satu fasa yang tegangannya diturunkan terlebih dahulu dengan menggunakan trafo step down lalu disearahkan menggunakan penyearah satu fasa gelombang penuh untuk menghasilkan sumber DC. Rangkaian pembagi tegangan digunakan untuk variasi pengereman.
Gambar 2. Rangkaian Pengereman Dinamik.
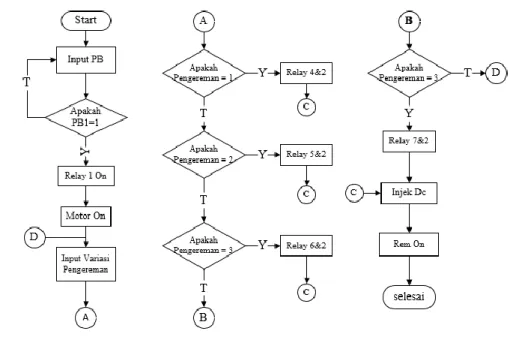
Flowchart program yang digunakan pada penelitian ini seperti ditunjukkan Gambar 3 berikut :
C. 142
Perancangan software dimulai saat input push button apakah sama dengan 1, maka mikrokontroler memberi perintah relay 1 on dan akan menghidupkan motor lalu masuk ke
input variasi pengereman dan apakah variasi pengereman sama dengan 1. Jika Ya, maka akan mengaktifkan relay 4&2 akan ON dan akan diinjeksikan arus DC untuk melakukan pengereman. Jika tidak, maka akan diolah kembali ke input variasi pengereman.
HASIL DAN PEMBAHASAN
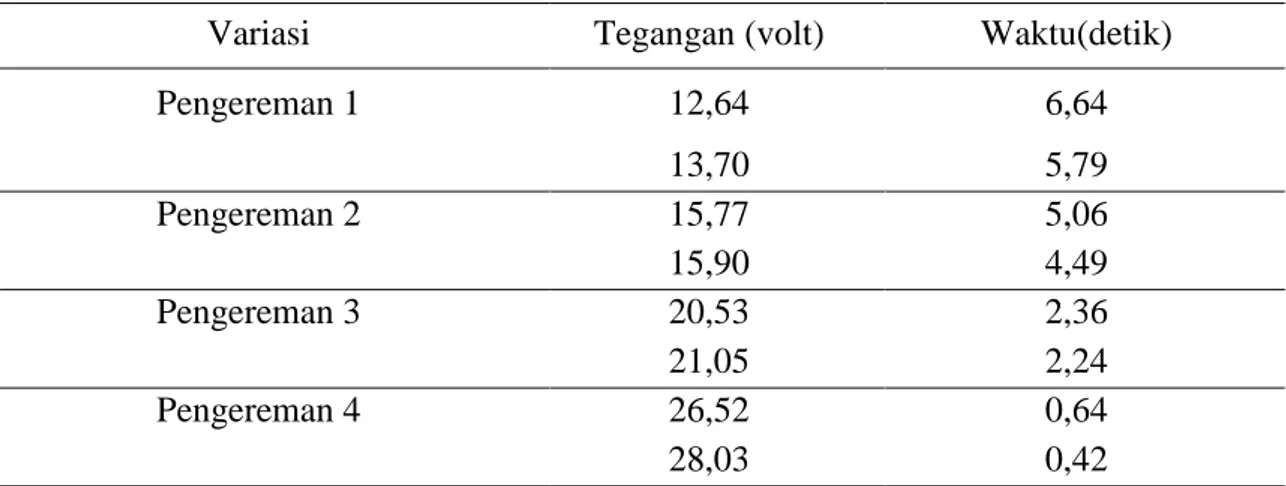
Pengujian ini dilakukan untuk mengetahui respon tegangan terhadap waktu pengereman dinamis yang dihasilkan pada saat variasi yang berbeda dengan diukur menggunakan
multimeter. Hasil pengujian respon tegangan terhadap waktu pengereman dinamis dapat dilihat pada Tabel 1.
Tabel 1. Hasil Pengukuran Tegangan dan Waktu Pegereman Dinamis Secara manual.
Variasi Tegangan (volt) Waktu(detik)
Pengereman 1 12,64 6,64 13,70 5,79 Pengereman 2 15,77 5,06 15,90 4,49 Pengereman 3 20,53 2,36 21,05 2,24 Pengereman 4 26,52 0,64 28,03 0,42
Masing-masing relay terhubung dengan indikator led yang dapat dilihat pada Gambar 4.
Gambar 4. Indikator relay saat variasi “Pengereman 1”
Gambar 5. merupakan uji coba saat variasi pengereman dinamis “Pengereman 2” dan akan mengaktifkan relay 2 dan 4 yang ditunjukkan oleh indikator pada Relay.
C. 143
Gambar 5. Indikator relay saat variasi “Pengereman 2”
KESIMPULAN
Berdasarkan hasil dari perancangan dan pengujian yang telah dilakukan serta analisa terhadap data yang diperolah maka disimpulkan sebagai berikut:
1. Penentuan nilai hambatan berpengaruh terhadap tegangan yang dihasilkan untuk pengereman dinamis.
2. Waktu yang diperoleh untuk pengereman dinamis dengan 4 variasi yaitu, semakin besar tegangan yang diinjeksikan maka pengereman dinamis juga akan menjadi semakin cepat.
DAFTAR PUSTAKA
Musrifah 2019“Implementation Dynamic Braking In 3 Phase Induction Motor Using Speech Recognition”. Teknik Listrik Industri, Politeknik Negeri Madura, Sampang, Madura. Moch Faishol Yusron, Joko, 2018 “Pengereman Dinamik Motor Induksi 3 Fase 220V
380V”. Jurnal INAJEEE. Volume 01 Nomor 01 Tahun 2018, 0 - 37, Fakultas Teknik, Universitas Negeri Surabaya.
Fahim Faisal, Mirza Muntasir Nishat.“An Investigation on DC Motor Braking System by Implementing Electromagnetic Relay and Timer”
Ahmad Khumaedi, Noer Soedjarwant “Otomatisasi Pengereman Motor DC Secara Elektris Sebagai Referensi Sistem Keamanan Mobil Listrik”
Aris Munandar, Muhammad Aria, 2016 “Sistem Pengereman Otomatis Menggunakan Logika Fuzzy Menggunakan Mikrokontroller”. TELEKONTRAN, VOL. 4, NO. 1,
Universitas Komputer Indonesia
Denny Firmansyah Z, 2016 “Pengaturan Pengereman Dinamik Motor Induksi 3 Phasa Berbasis Smartphone Android Dan Simulasi Matlab”. Jurnal Rekayasa dan Teknologi
C. 144
Radi Birdayansyah, Noer Sudjarwanto, Osea Zebua, 2015 “Pengendalian Kecepatan Motor DC Menggunakan Perintah Suara Berbasis Mikrokontroler Arduino”. Jurnal Rekayasa dan Teknologi Elektro, Fakultas Teknik, Universitas Lampung.
Agung Warsito, 2006 “Pengereman Dinamik Pada Motor Induksi 3 Fasa”. Transmisi, Vol.