46
BAB IV
SISTEM SATELIT NAVIGASI COMPASS
Pada bab ini pembahasan akan ditekankan pada ketiga segmen utama dari sistem satelit navigasi COMPASS, sistem koordinat, sistem waktu, dan juga akan membahas bagaimana perbandingan serta keuntungan sistem ini terhadap sistem GNSS lain.
Pada bagian pertama akan dijelaskan bagaimana desain konstelasi satelit yang akan digunakan oleh COMPASS sebagai suatu komponen penting yang ditempatkan di angkasa. Kedua, akan dibahas mengenai bagian-bagian sistem kontrol dan bagaimana sistem kontrolnya bekerja. Konsep pelayanan dan receiver yang akan digunakan oleh pengguna nantinya akan dibahas pada bagian ketiga. Selanjutnya pembahasan akan mengarah pada sistem koordinat dan sistem waktu yang digunakan. Sedangkan bagaimana perbandingan dan keuntungannya terhadap sistem GNSS lain, akan dibahas pada bagian terakhir dari bab ini.
4.1 Segmen Angkasa
4.1.1
Konstelasi satelitSistem COMPASS menggunakan 3 jenis satelit, yaitu satelit GEO (Geostasioner Orbit), IGSO (Inclined Geosynchronouos Orbit) dan MEO (Medium Earth Orbit). Satelit GEO dan MEO diilustrasikan oleh Gambar 4.1 dan 4.2.
Satelit GEO dan IGSO adalah satelit dengan orbit geosynchronous. Orbit geosynchronous adalah orbit suatu benda (umumnya satelit buatan) dengan bumi sebagai pusatnya, yang mempunyai perioda sama dengan rotasi bumi (24 jam). Jika sebuah satelit dengan orbit geosinkron mempunyai bentuk orbit lingkaran sempurna dan mengorbit sebidang dengan garis khatulistiwa atau ekuator bumi, maka satelit itu disebut satelit Geostasioner (GEO). Sedangkan apabila sebuah satelit mengorbit dengan perioda yang sama dengan bumi namun mempunyai sudut orbit (inklinasi) yang lebih besar dari 0° dengan ekuator bumi, maka satelit itu disebut satelit Inclined Geosynchronouos (IGSO).
47 Satelit MEO atau Medium Earth Orbit adalah satelit yang mengorbit pada ketinggian sekitar 8000 – 22000 km diatas permukaan bumi, dibawah satelit yang mempunyai orbit geosinkron. Lintasan orbit dirancang agar melewati kutub bumi Utara dan Selatan dan membentuk orbit elips (Siregar, 2009).
Gambar 4.1 Satelit GEO (Siregar, 2009)
Gambar 4.2 Satelit MEO (Siregar, 2009)
Secara umum, karakteristik satelit GEO dan MEO dapat dilihat pada Tabel 4.1 berikut (Anggarayudha, 2001).
Tabel 4.1 Karakteristik satelit GEO dan MEO MEO
(Medium Earth Orbit)
GEO
(Geosynchronous Earth Orbit)
Ketinggian 8000 – 22000 km 35786 km
Periode orbit 5-12 jam 24 jam
Waktu dalam keadaan line of sight dari stasiun kontrol di bumi
48 Konstelasi satelit yang digunakan dalam sistem satelit COMPASS dibagi menjadi tiga tahap berdasarkan tahap proses pembangunannya. Tahap itu adalah :
a. Fase I
Tahap pertama adalah tahap Beidou-I atau Beidou Navigation Satellite Demonstration System. Berdasarkan presentasi China Satellite Navigation Office pada pertemuan ICG ke-5 di Italia, konstelasi satelit pada fase ini terdiri dari 3 buah satelit berjenis geostasioner (GEO) yang mempunyai karakteristik seperti pada Tabel 4.2.
Tabel 4.2 Karakteristik konstelasi COMPASS fase I (CSNO, 2010)
Orbit GEO
Semi-major Axis (km) 42164
Eccentricity 0
Inclination (deg) 0
RAAN (deg) 180E, 210.5E, 240E
Argument perigee (deg) 0
Mean anomaly (deg) 0
Satellite number 3
Longitude (deg) 80E, 110.5E, 140E
Fungsi utama dan spesifikasi kinerja dari Beidou Navigation Satellite Demonstration System menggunakan desain konstelasi satelit ini adalah :
f. Fungsi utama : penentuan posisi, penentuan waktu one-way dan two-way, dan layanan SMS.
g. Area pelayanan : China dan wilayah sekitarnya. h. Ketelitian posisi : hingga ketelitian 20 meter.
i. Ketelitian waktu : 100 ns pada one way, 20 ns pada two way. j. SMS : 120 Chinese karakter per waktu.
49 b. Fase II
Fase ini disebut juga Beidou Navigation Satellite (Regional) System atau Beidou-2/COMPASS. Konstelasi satelit pada segmen ini akan terdiri dari 5 satelit GEO, 5 satelit IGSO dan 4 satelit MEO dengan karakteristik seperti yang ada pada Tabel 4.3.
Tabel 4.3 Karakteristik konstelasi COMPASS fase II (CSNO, 2010)
Parameter orbit GEO IGSO MEO
Semi-major Axis (km) 42164 42164 27878
Eccentricity 0 0 0
Inclination (deg) 0 55 55
Longitude of
Ascending Node (deg)
158.75E, 180E, 210.5E, 240E, 260E
218E, 98E, 338E,
218E, 98E 0E, 120E
Argument perigee
(deg) 0 0 0
Mean anomaly (deg) 0
218E, 0.98E, 120.33E, 240.21E, 337.98E 105, 150, 270, 315 Satellite number 5 5 4
Longitude (deg) 58.75E, 80E,
110.5E, 140E, 160E 0, 120, 240 0, 120, 240
Fungsi utama dan kinerja dari Beidou Navigation Satellite (regional) System yang dihasilkan oleh desain konstelasi ini adalah :
g. Fungsi utama : penentuan posisi, pengukuran kecepatan, penentuan waktu one-way dan two-way, dan layanan SMS.
h. Area pelayanan : China dan sebagian wilayah Asia-Pasifik, termasuk Indonesia. i. Ketelitian posisi : hingga ketelitian 10 meter.
j. Ketelitian kecepatan : hingga ketelitian 0.2 m/s. k. Ketelitian waktu : 50 ns.
50 c. Fase III
Segmen angkasa sistem satelit navigasi COMPASS nantinya akan terdiri dari 35 konstelasi satelit, yaitu 5 satelit GEO (Geostationary Orbit) dan tidak lebih dari 30 satelit non-GEO yang terdistribusi di tiga bidang orbit. Ilustrasi dari desain konstelasi sistem ini dapat dilihat pada Gambar 4.3.
Gambar 4.3 Ilustrasi konstelasi satelit sistem COMPASS (Cao, 2008)
Satelit GEO secara berturut-turut terletak pada 58.75°BT, 80°BT, 110.5°BT, 140°BT dan 160°BT pada ketinggian sekitar 35.786 km diatas permukaan bumi. Terdiri dari modul layanan (upload) dan modul muatan (payload) dan dirancang dengan umur operasional selama 8 tahun. Sedangkan satelit non-GEO terdiri dari 27 buah satelit MEO (Medium Earth Orbit) dan 3 satelit IGSO (Inclined Geo-Syncrhonous).
Satelit MEO beroperasi pada ketinggian 21500 km dengan sudut inklinasi sebesar 55° pada tiga bidang orbit. Desain satelit MEO berbeda dengan satelit COMPASS lainnya. Satelit ini mempunyai berat kotor sekitar 800 kg dan kapasitas muatan sebesar 280 kg. Distabilkan oleh tiga sumbu dan menghasilkan output daya sebesar 1500 kW.
Satelit IGSO dalam desainnya mirip dengan satelit geostasioner, namun ditempatkan di orbit geosinkron pada ketinggian 36000 km dengan inklinasi sebesar 55° dan akan memotong ekuator bumi pada bujur 118°.
51 Semua parameter orbit dari masing-masing tipe satelit telah direncanakan dengan baik sehingga mengurangi banyaknya manuver yang harus dilakukan oleh satelit dan mempermudah proses pemeliharaan satelit pada orbit selama masa operasionalnya. Hal ini juga akan meningkatkan nilai ketersediaan sinyal, menghemat jumlah bahan bakar yang digunakan dan tentu saja menghemat biaya. Secara keseluruhan, parameter-parameter konstelasi atau parameter orbit satelit COMPASS yang telah direncanakan dapat dilihat pada Tabel 4.4.
Tabel 4.4 Parameter konstelasi satelit COMPASS (CSNO, 2010)
Parameter GEO (5) IGSO (3) MEO (27)
First launch Beidou-1A
(30 oct 2000) Beidou 2-05 (31 juli 2010) Beidou 2-01 (13 April 2007) Semi-major Axis 42164 km 42164 km 27840 km Altitudes 35786 km 36000 km 21500 km Eccentricity 0° 0° 0° Longitude of Ascending Node (deg) 158.75E, 180E,
210.5E, 240E, 260E 0°, 120°, 240° 0°, 120°, 240°
Inclination 0° 55° 55°
Satellite bus DFH-3B DFH-3B DFH-3B
Gross mass 4600 kg 4200 kg 2200 kg
Propelant mass 3050 kg 2300 kg 2160 kg
Power output 6800 W 6200 W 3000 W
Designed life 8 years 8 years 8 years
Launch vehicle CZ-3C CZ-3A CZ-3A
52
4.1.2
Sinyal dan frekuensiCDMA atau Code Division Multiple Acces adalah suatu sistem komunikasi wireless yang dipakai oleh para mobile operator seperti operator layanan seluler dan operator penyedia layanan satelit navigasi. Sistem ini menggunakan teknologi spread spectrum atau spektra kode yang menyebar yang memberikan akses pemakaian pada banyak pengguna pada frekuensi dan waktu yang sama. Hal ini dapat dilakukan dengan pemberian kode unik untuk setiap komunikasi. CDMA dapat menyediakan layanan bagi banyak pengguna daripada teknologi komunikasi lainnya (Aingindra.com, 2009)
Pada teknologi satelit navigasi, prinsip CDMA banyak digunakan dalam mendistribusikan sinyal dan frekuensi. Faktanya, GPS dan GALILEO menggunakan sistem ini dalam beroperasi dan melayani para pengguna. CDMA tidak hanya dipakai oleh dua layanan sistem navigasi itu, namun juga digunakan oleh sistem satelit navigasi COMPASS. Melalui sistem ini, COMPASS berencana akan menyediakan dua layanan navigasi, yaitu layanan terbuka (open service) untuk konsumen komersil dan layanan penentuan posisi yang dilindungi (authorized service) seperti dalam kepentingan militer.
Menurut pengajuan yang dilakukan China terhadap International Telecommunication Union (ITU), satelit COMPASS akan memancarkan sinyal melalui empat frekuensi pembawa, yaitu 1561MHz (E2), 1589 MHz (E1), 1268MHz (E6) dan 1207MHz (E5b). Sinyal navigasi ini dimodulasi dengan bit stream yang telah ditentukan sebelumnya, mengandung data waktu dan kode ephemeris, serta memiliki bandwith yang cukup untuk menghasilkan navigasi yang presisi.
Saat ini belum ada informasi resmi yang lebih terinci dari otoritas China mengenai aspek teknis sinyal yang akan digunakan sistem COMPASS secara global di masa depan. Namun dengan adanya peluncuran satelit COMPASS pertama yaitu COMPASS-M1, pemerintah China dapat mengidentifikasi sinyal-sinyal yang akan digunakan. Dari hasil identifikasi transmisi Satelit COMPASS-M1 inilah pemerintah China mengajukan alokasi frekuensi yang akan digunakan kepada ITU.
Satelit COMPASS-M1 adalah satelit pertama yang merepresentasikan generasi baru sistem satelit navigasi China. Satelit ini adalah satelit MEO pertama China. Satelit COMPASS-M1 yang diluncurkan pada 13 April 2007 merupakan satelit eksperimen untuk menvalidasi sinyal serta frekuensi yang akan digunakan sistem COMPASS.
53 China mengizinkan para peneliti independen untuk meneliti dan mempelajari karakteristik umum dari sinyal satelit itu. Salah satunya penelitian yang dilakukan oleh Centre National d’Etudes Spatiales (CNES) di Prancis yang dimulai sehari setelah satelit itu mengangkasa.
Menurut peneliti dari CNES, Thomas Grelier (2007), COMPASS-M1 mentransmisikan sinyal melalui 4 pita frekuensi yaitu E1, E2, E5b, dan E6, sama seperti yang dinyatakan otoritas China kepada ITU. Namun dari hasil pengamatan, sinyal pada frekuensi E1 sampai saat ini belum bisa terdeteksi. Setiap pita frekuensi memiliki dua sub-sinyal yang koheren namun mempunyai beda fase 90°. Dua komponen sinyal ini kemudian dikenal dengan komponen “I” dan “Q”. Komponen “I” mempunyai kode yang lebih pendek dan lebih diutamakan untuk frekuensi pelayanan terbuka (open service). Sedangkan komponen “Q” mempunyai kode yang lebih panjang, lebih tahan gangguan dan lebih digunakan pada layanan authorized. Karakteristik sinyal COMPASS menurut CNES berdasarkan penelitian pada satelit COMPASS-M1 ditunjukkan pada Tabel 4.5.
Tabel 4.5 Karakteristik umum sinyal satelit COMPASS (Grelier et al, 2007) Notasi COMPASS Frekuensi Modulasi Service
B1 (I) 1561.1 (E2) QPSK Open B1 (Q) Authorized B1-2 1589.74 (E1) QPSK Open B2 (I) 1207.14 (E5b) QPSK Open B2 (Q) Authorized B3 1268.52 (E6) QPSK Authorized
Dari karakteristik umum sinyal satelit COMPASS diatas diketahui bahwa sinyal satelit COMPASS akan mengalami tumpang tindih (overlay) dengan beberapa sinyal yang digunakan oleh sistem GPS dan GALILEO. Fakta ini tentu saja akan membawa berbagai macam dampak dalam dunia GNSS nantinya. Karena itu, data dan laporan terinci dari aspek teknis sinyal dan frekuensi yang digunakan COMPASS sangatlah penting untuk diketahui, agar dapat menilai dampak apa yang akan dibawanya.
54 Karakteristik umum dari sinyal COMPASS-M1 yang didapatkan oleh CNES (Tabel 4.5), menurut China Satellite Navigation Office (CSNO) merupakan karakteristik sinyal yang digunakan pada sistem COMPASS fase II, yang terdiri dari 5 sinyal dalam 3 frekuensi . Lebih jauh lagi CSNO menyatakan bahwa pada sistem COMPASS fase III (global), akan digunakan kombinasi 10 sinyal dalam 3 frekuensi pembawa. Karakteristiknya ditunjukkan oleh Tabel 4.6.
Tabel 4.6 Karakteristik umum sinyal satelit COMPASS fase III (CSNO, 2010)
Komponen Frekuensi
(MHz) Tipe modulasi Layanan B1-CD 1575.42 MBOC (6,1,1/11) Open B1-CP B1 BOC (14,2) Authorized B2aD 1191.795 AltBOC (15,10) Open B2ap B2bD B2bD B3 1268.52 QPSK Authorized B3-AD BOC (15,2.5) Authorized B3-Ap
55 Sampai saat ini belum semua aspek teknis dari sinyal itu telah terdefinisi. Beberapa karakteristik sinyal yang telah terdefinisi diantaranya dinyatakan oleh European Space Agency (ESA) dalam situs internetnya navipedia.net.
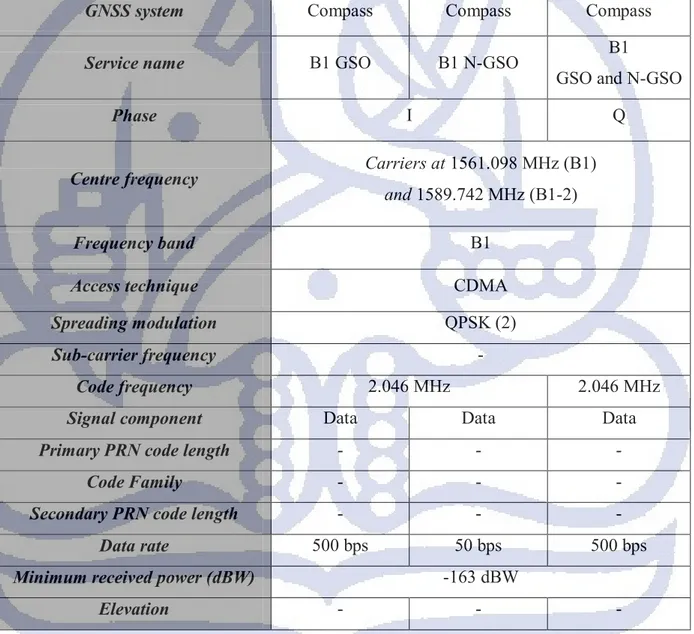
a. Sinyal COMPASS B1
Meskipun semua aspek teknis dari sinyal COMPASS di B1 masih belum didefinisikan lagi, sebuah perencanaan untuk sinyal gelombang sudah disampaikan kepada International Telecommunication Union (ITU) seperti yang disimpulkan pada tabel sebelumnya. Untuk menyimpulkan beberapa aspek teknis sinyal COMPASS di B1 berdasarkan pengajuan yang dilakukan China pada ITU, dapat ditunjukkan oleh Tabel 4.7 berikut (ESA navipedia, 2011).
Tabel 4.7 Karakteristik sinyal B1 satelit COMPASS (ESA navipedia, 2011)
GNSS system Compass Compass Compass
Service name B1 GSO B1 N-GSO B1
GSO and N-GSO
Phase I Q
Centre frequency Carriers at 1561.098 MHz (B1) and 1589.742 MHz (B1-2)
Frequency band B1
Access technique CDMA
Spreading modulation QPSK (2)
Sub-carrier frequency -
Code frequency 2.046 MHz 2.046 MHz
Signal component Data Data Data
Primary PRN code length - - -
Code Family - - -
Secondary PRN code length - - -
Data rate 500 bps 50 bps 500 bps
Minimum received power (dBW) -163 dBW
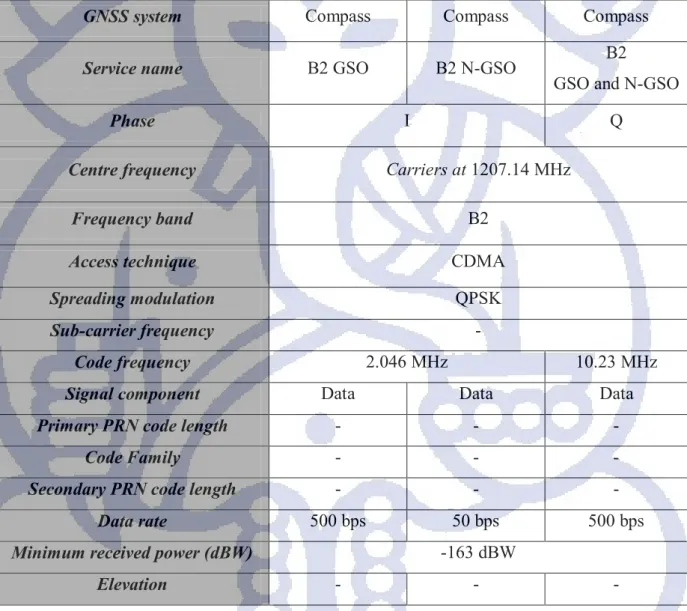
56 b. Sinyal COMPASS B2
Sama dengan sinyal B1 dan B1-2, tidak semua aspek teknis dari sinyal COMPASS pada B-2 telah terdefinisikan. Meskipun begitu, rencana dan karakteristik gelombang sinyal yang digunakan telah diajukan ke ITU. Karakteristik sinyal COMPASS pada B-2 ditunjukkan pada Tabel 4.8.
Tabel 4.8 Karakteristik sinyal B2 satelit COMPASS (ESA navipedia, 2011)
GNSS system Compass Compass Compass
Service name B2 GSO B2 N-GSO B2
GSO and N-GSO
Phase I Q
Centre frequency Carriers at 1207.14 MHz
Frequency band B2
Access technique CDMA
Spreading modulation QPSK
Sub-carrier frequency -
Code frequency 2.046 MHz 10.23 MHz
Signal component Data Data Data
Primary PRN code length - - -
Code Family - - -
Secondary PRN code length - - -
Data rate 500 bps 50 bps 500 bps
Minimum received power (dBW) -163 dBW
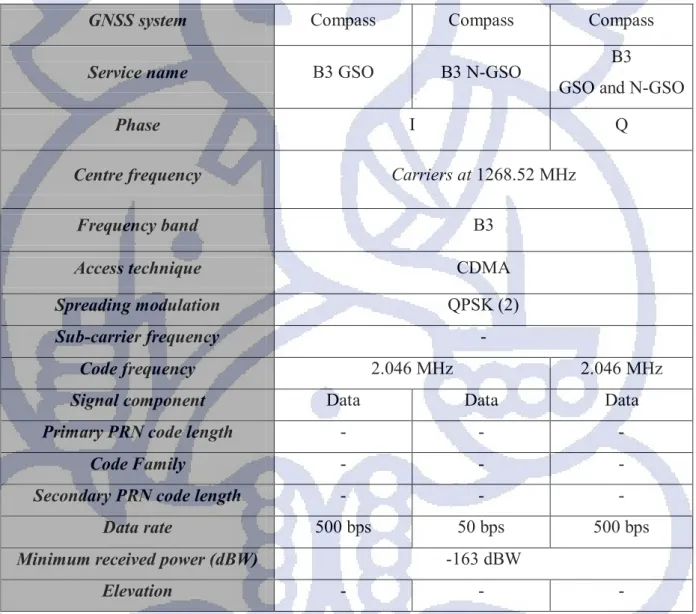
57 c. Sinyal COMPASS B3
Sinyal B3 adalah sinyal terakhir yang digunakan oleh sitem COMPASS. Pemakaian sinyal ini hanya untuk pelayanan tertentu atau disebut juga authorized service. Sama dengan dua sinyal sebelumnya, belum semua aspek teknis sinyal B3 yang telah didefinisikan. Namun karakteristiknya sudah diajukan ke ITU. Tabel 4.9 berikut menunjukkan beberapa karakteristik dari sinyal B3 pada COMPASS.
Tabel 4.9 Karakteristik sinyal B3 satelit COMPASS (ESA navipedia, 2011)
GNSS system Compass Compass Compass
Service name B3 GSO B3 N-GSO B3
GSO and N-GSO
Phase I Q
Centre frequency Carriers at 1268.52 MHz
Frequency band B3
Access technique CDMA
Spreading modulation QPSK (2)
Sub-carrier frequency -
Code frequency 2.046 MHz 2.046 MHz
Signal component Data Data Data
Primary PRN code length - - -
Code Family - - -
Secondary PRN code length - - -
Data rate 500 bps 50 bps 500 bps
Minimum received power (dBW) -163 dBW
58
4.2 Segmen Kontrol
Segmen sistem kontrol merupakan salah satu bagian penting dari arsitektur satelit navigasi global. Fungsi utama dari segmen kontrol adalah untuk memonitor satelit, mengatur pergerakan satelit, mendefinisikan parameter-parameter satelit, dan memproses data.
Sama seperti segmen kontrol sistem lainnya, segmen kontrol sistem COMPASS terdiri dari beberapa bagian yang terintegrasi. Menurut China Satellite Navigation Office (CSNO), hingga saat ini sistem COMPASS terdiri dari Master Control Station (MCS), Upload Station (US) dan jaringan Monitor Station (MS).
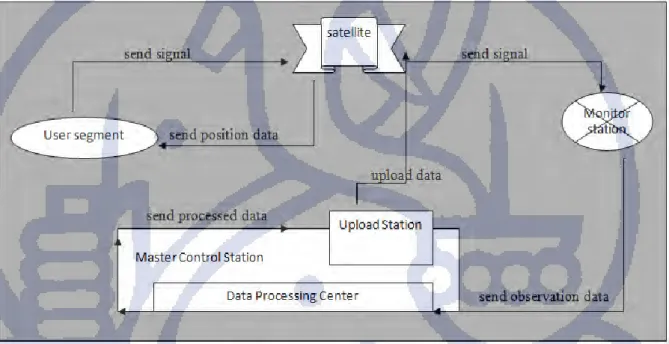
Skema umum kerja segmen kontrol dalam melayani operasional sistem satelit COMPASS terutama dalam menentukan posisi diilustrasikan dalam Gambar 4.4.
Gambar 4.4 Skema umum segmen kontrol COMPASS
Pertama sinyal ditransmisikan oleh segmen penggunake satelit. Masing-masing satelit yang melintas menerima sinyal itu dan mentransmisikannya ke MS. MS mengumpulkan setiap data dan sinyal dari setiap satelit yang diamati, lalu mengirimkan data pengamatan itu ke MCS untuk diproses dan diolah. MCS mengolah dan menghitung posisi 3D receiver berdasarkan data sinyal yang diterima. Melalui Upload Station (US), MCS mengirimkan data yang telah diproses ke satelit. Proses akhir adalah satelit menyiarkan atau mentrasmisikan sinyal yang telah diolah oleh MCS menjadi data posisi kembali ke pengguna.
59 a) Master Control Station
Master Control Station atau MCS adalah sebuah fasilitas yang bertanggung-jawab untuk mengontrol semua bagian-bagian sistem satelit yang digunakan dan menghasilkan perintah navigasi (navigation message). Tugas utama MCS seperti yang dikatakan China Satellite Navigation Office adalah sebagai berikut :
Mengumpulkan data pengamatan dari tiap-tiap MS. Mengolah data pengamatan.
Menghasilkan perintah navigasi .
Wide area differential data dan integritas informasi. Melakukan perencanaan dan penjadwalan.
Mengadakan pengawasan dan pengontrolan sistem operasi.
Hingga saat ini sistem COMPASS menggunakan satu Master Control Station yang terletak di Weinan, Provinsi Shaanxi, bernama Xi’an Satellite Control Centre (XSCC). XSCC adalah pusat komunikasi, pusat komando dan kontrol, pusat pengolahan data dan kantor pusat administrasi telemetri, pelacakan, serta kontrol jaringan luar angkasa China. XSCC ditunjukkan oleh Gambar 4.5.
Gambar 4.5 Xi’an Satellite Control Center (9abc.net, 2011)
60 Xi’an Satellite Control Center terdiri dari tujuh bagian sistem utama yang saling terintegrasi, yaitu (Yinlong, 1996) :
a. Tracking system
Dengan menggunakan peralatan radio tracking and telemetry yang dapat memperoleh parameter pergerakan satelit seperti jarak, sudut orientasi, pitch angle, dan rata-rata variasi jarak untuk memutuskan elemen orbit satelit.
b. Telemetry system
Sistem peralatan radio telemetri menerima dan memodulasikan kembali sinyal telemetri satelit untuk memperoleh parameter teknis dan parameter telemetri satelit. c. Remote control system
Sistem peralatan radio remote control adalah untuk mengeluarkan kontrol komando bagi satelit, dan juga untuk mengatur pergerakan dan status operasi satelit.
d. Data processing system
Bagian ini adalah bagian sistem komputer untuk memproses data-data dari satelit menjadi parameter posisi, seperti posisi satelit, posisi receiver atau pengguna sistem. e. Communication system
Sistem ini terdiri dari circuit terminal, terminal transmisi data, exchange equipment, dan jaringan data, yang mana jaringan data ini lebih jauh terbagi lagi menjadi saluran kabel, saluran wireless dan saluran komunikasi satelit. Bentuk komunikasi yang digunakan adalah suara, telegrafi telemetri, faksimili, transmisi data dan transmisi gambar pada televisi.
f. Time frequency system (TFS)
Sistem ini terdiri dari peralatan penentuan waktu, generator sinyal dan sumber frekuensi. Sistem ini adalah bagian yang paling penting dari sistem COMPASS dalam sinkronisasi dan pengukuran waktu. Penjelasan lebih lanjut sistem ini akan dilakukan di bagian sistem waktu COMPASS.
g. Command and control system
Sistem ini berfungsi sebagai pengatur dan pemberi perintah bagi seluruh jaringan sistem segmen kontrol COMPASS.
61 b) Upload Station
Upload Station (US) adalah bagian sistem kontrol yang bertanggung jawab meng-upload koreksi orbit, transmisi data dan navigational message dari MCS ke satelit. Semua data-data dan informasi yang akan ditransmisikan ke satelit dari MCS, diatur dan dikontrol oleh bagian ini. Sampai saat ini China menggunakan dua Upload Station yang digunakan oleh sistem COMPASS, yaitu Xi’an Satellite Control Center (XSCC) dan Beijing Aerospace Command and Control Center (BACC) seperti yang terlihat pada Gambar 4.6
62 c) Monitor Station
Monitor station (MS) adalah bagian yang bertanggung-jawab dalam memonitor dan melacak satelit. Fungsi utama dari Monitor Station dapat disimpulkan sebagai berikut :
Melacak dan memantau satelit secara kontinyu.
Mengumpulkan data pengamatan satelit dari masing-masing lokasi. Menerima sinyal dari satelit.
Mengirim data hasil observasi kepada Master Control Station agar diolah dan diproses.
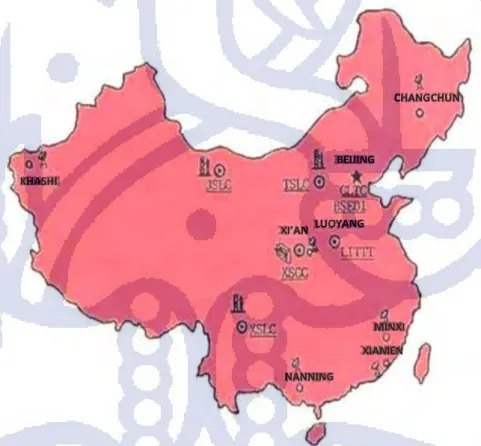
Menurut Tsinghua University, sampai saat ini China menggunakan 30 Monitor Station yang tersebar di seluruh dunia. Posisi dan distribusi monitor dan tracking station yang digunakan oleh China diantaranya dijelaskan oleh Gambar 4.7 (a dan b) dan Tabel 4.10.
Gambar 4.7a COMPASS monitor station in China (globalsecurity.org, 2011 ) CHANGCHUN BEIJING LUOYANG XI’AN MINXI NANNING XIAMEN KHASHI
63
Gambar 4.7b COMPASS monitor station in world (online-wsj.com, 2011 )
Tabel 4.10 Distribusi COMPASS monitor station (dragoninspace.com, 2012) Station Name Daerah/Negara
Weinan Shaanxi (China)
Changchun Jilin (China)
Karshi Xinjiang (China)
Minxi Fujian (China)
Xiamen Fujian (China)
Nanning Guangxi (China)
Qingdao Shandong (China)
Guiyang China Yilan China Karachi Pakistan Malindi Kenya Swakopmund Namibia Dongara Australia Santiago Chile
64
4.3 Segmen Pengguna
Segmen pengguna sistem COMPASS terdiri dari receiver pengguna COMPASS yang menerima sinyal navigasi dari satelit dan menghitung persamaan navigasi yang ditransmisikan oleh satelit, untuk mendapatkan koordinat posisi receiver tersebut.
4.3.1
COMPASS receiverReceiver COMPASS (Gambar 4.8) merupakan perangkat yang mampu menentukan posisi pengguna, kecepatan, dan waktu yang tepat dengan mengolah sinyal yang ditransmisikan oleh satelit COMPASS.
Menurut European Space Agency (ESA), modulasi sinyal, struktur, format, dan isi pesan navigasi GNSS sering berbeda antara setiap sinyal dari sistem yang sama dan juga dari sistem yang berbeda. Namun sebagian besar perbedaan karakteristik ini mudah diimplementasikan pada receiver, contohnya dengan cara memodifikasi perangkat lunaknya seperti penggunaan kode PRN yang berbeda atau kemampuan untuk mengatasi struktur pesan yang berbeda. Perbedaan utama antara receiver GNSS terletak hanya pada karakteristik tertentu, seperti teknik akses atau modulasi yang digunakan.
COMPASS, sebagaimana GPS dan GALILEO, menggunakan prinsip CDMA dalam sistem transmisinya. Hal ini memungkinkan penggunaan modul transmisi yang lebih sederhana, karena semua sinyal pada frekuensi yang sama memiliki gelombang pembawa yang umum. Oleh karena itu receiver COMPASS harusnya sama saja dengan receiver GNSS lainnya. Namun, COMPASS mempunyai layanan pesan singkat dalam lingkup regional yang memungkinkan pengguna untuk mengirimkan atau meminta informasi ke stasiun kontrol. Jalur komunikasi tambahan ini menambah kompleksitas sistem receiver. Karena itu, bisa jadi biaya receiver yang dapat mendeteksi sinyal COMPASS berpotensi lebih mahal.
65 Pada tahun 2008, biaya satu receiver COMPASS adalah CN¥20000 RMB (US$2929 atau jika dirupiahkan sekitar 30 juta rupiah), sepuluh kali lebih mahal daripada harga satu receiver GPS. Alasannya karena receiver COMPASS menggunakan chip impor yang harganya relatif lebih mahal. Namun, tampaknya saat ini China telah menemukan chip pengganti yang lebih murah yang harganya bisa lebih rendah hingga kurang dari CN¥1000 RMB atau hanya sekitar Rp1.500.000 (wikipedia.com, 2012).
Perlu dicatat bahwa tren yang sedang berkembang saat ini adalah setiap penyedia layanan GNSS memfasilitasi konsumen untuk dapat mengakses layanan dari setiap sistem GNSS yang berbeda, atau dikenal juga dengan receiver-multi konstelasi. Oleh karena itu, sebagian diskusi dan kesepakatan antara penyedia sistem dilakukan dalam arti mewujudkan upaya ini, dengan fokus pada aspek kompatibilitas dan interoperabilitas dalam sistem.
Mewujudkan kompatibilitas dan interoperabilitas dalam sistem GNSS tidak hanya menjadi bagian diskusi dari penyedia layanan saja, mau tidak mau bagian ini juga akan melibatkan pihak pengembang atau developer pabrikan produsen receiver GNSS, sebagai pihak yang paling penting dalam perwujudan konsep receiver-multi konstelasi. Mereka adalah aktor utama untuk merealisasikan konsep ini. Saat ini semua produsen receiver GNSS tengah berlomba-lomba menawarkan dan memperbaharui sistem receiver yang mereka punya agar dapat kompatibel dengan teknologi GNSS yang sedang berkembang. Itu artinya setiap produsen receiver GNSS akan mempunyai produk yang tidak hanya dapat mendeteksi sistem GPS dan GLONASS saja, namun juga akan menawarkan kemampuan mendeteksi sistem GNSS yang sedang berkembang, yaitu GALILEO dan COMPASS.
Leica Geosystem misalnya, sebagai produsen receiver GNSS dan perusahaan yang telah lebih dari 200 tahun melayani pengukuran bumi dengan produk yang dihasilkannya, saat ini telah mengembangkan berbagai macam jenis dan tipe receiver GNSS yang dapat mendeteksi banyak sinyal dan konstelasi dari sistem-sistem GNSS yang tersedia hanya dengan menggunakan satu receiver saja. Begitu juga dengan produsen-produsen receiver GNSS lainnya yang telah banyak dikenal dan digunakan seperti Trimble, Javad, Novatel, dan lain sebagainya.
66 Beberapa diantara produsen receiver GNSS yang telah menyediakan layanan receiver multi-konstelasi, dirangkum dari berbagai sumber pada Tabel 4.11 berikut ini.
Tabel 4.11 Receiver GNSS multi konstelasi
Nama Jenis
Sistem GNSS
GPS GLONASS GALILEO COMPASS
Novatel OEM628 GNSS Receivers √ √ √ √
Trimble NetR9 GNSS Reference Receiver √ √ √ √
Trimble SPS855 GNSS Modular Receiver √ √ √ √
Trimble SPS985 GNSS Smart Antenna √ √ √ √
Javad Triumph
Chip GNSS Chip Baseband √ √ √ √
Spirent GSS8000 Multi-GNSS Constellation
Simulator √ √ √ √
Fastrax IT600 GNSS Receiver Module √ √ √ √
Olinkstar CNS100 GNSS Receiver √ √ √ √
Olinkstar CC100 GNSS Receiver √ √ √ √
Olinkstar
67 Tabel 4.11 Receiver GNSS multi konstelasi (lanjutan)
Sementara itu, mengacu kepada pesatnya kemajuan pembangunan sistem COMPASS, beberapa software pengolahan dan processing data yang kompatibel dengan data sistem COMPASS mulai dikembangkan. Software-software itu misalnya PANDA software (Chuang, 2008), Bernese software (Montenbruck et al, 2012), SHODE software (Xiaoya et al, 2009), dan NAPEOS software (positim.com, 2010).
Nama Jenis
Sistem GNSS
GPS GLONASS GALILEO COMPASS
Olinkstar
NavCore-S Multi-GNSS Baseband Chip √ √ √ √
Leica AR25 GNSS Antenna √ √ √ √
Leica AR10 GNSS Antenna √ √ √ √
Leica AS10 GNSS Antenna √ √ √ √
Leica Viva GS25 GNSS Surveying receiver √ √ √ √
Leica Viva GS12 GNSS Receiver √ √ √ √
Leica Viva GS10 GNSS Receiver √ √ √ √
Leica Viva GS15 GNSS Receiver √ √ √ √
SOUTH RTK
68
4.3.2
Konsep pelayananBerdasarkan wilayahnya, COMPASS memberikan pelayanan sebagai berikut (CSNO, 2011) : a. Global Service
Pelayanan ini dapat dibagi lagi menjadi dua layanan yang berbeda, yaitu : Open Service
Open service atau layanan terbuka ini sama dengan layanan terbuka milik sistem GPS dan GALILEO. Layanan ini gratis dan terbuka untuk semua pengguna di seluruh dunia. Pengguna dapat menghitung posisi navigasi dengan menggunakan prinsip yang sama dengan sistem GNSS lainnya.
Parameter layanan yang diberikan ditunjukkan pada Tabel 4.12.
Tabel 4.12 Karakteristik COMPASS open service
Authorized Service
Layanan ini adalah layanan yang diberikan untuk pihak berwenang yang memerlukan tingkat akurasi tinggi bahkan dalam kondisi kompleks sekalipun, seperti pemerintah dan militer China. Layanan ini juga bersifat rahasia, karena itu sampai sekarang informasi tentang layanan ini sangatlah sedikit. Namun berdasarkan pengajuan China kepada International Telecommunication Union mengenai sinyal dan frekuensi COMPASS, layanan authorized ini akan menggunakan sinyal B1(Q), B2(Q) dan B3.
Fungsi utama Penentuan posisi, pengukuran kecepatan, one-way dan two-way timing, pesan singkat dengan 120 chinese karakter. Area pelayanan Global
Akurasi posisi 10 meter Akurasi kecepatan 0.2 m/s Akurasi waktu 20 ns
69 b. Regional Service
Adalah layanan yang hanya diberikan pada wilayah China dan sekitarnya. Selain dari layanan terbuka pada global service, sistem COMPASS di wilayah regional China akan memberikan layanan terintegrasi lainnya, yaitu :
Wide Area Differential Service
Adalah sistem terintegrasi yang memberikan layanan peningkatan ketelitian dan akurasi penentuan posisi. Pada sistem COMPASS, layanan ini diramalkan menghasilkan ketelitian dan akurasi posisi hingga mencapai satu meter di wilayah China. Cara kerja layanan ini adalah dengan mengoreksi kesalahan/error yang ada hingga mendapatkan hasil yang akurat. Biasanya layanan ini hanya diberikan pada authorized user (Chen, 2011).
Short Message Service
Atau yang disebut juga sebagai layanan laporan posisi adalah layanan yang memungkinkan pengguna dan pusat layanan pengguna untuk bertukar informasi posisi melalui pesan singkat (saat ini 120 Chinese karakter per pesan).
70
4.4 Sistem Koordinat COMPASS
Sebuah sistem satelit navigasi akan memerlukan sistem koordinat untuk digunakan sebagai referensi penetuan posisi. Kompatibilitas dan interoperabilitas antar GNSS di dunia tidak akan terwujud jika tidak mempunyai sistem dan referensi koordinat yang konsisten dan sama. Dalam teorinya, semua sistem koordinat referensi GNSS seharusnya mengacu kepada sistem koordinat geosentrik referensi yang sama, yang bermanfaat kepada pihak penyedia jasa satelit navigasi, perusahaan pembuat receiver GNSS dan para pengguna. Namun, sistem koordinat referensi yang sama bukan berarti harus memiliki kerangka referensi yang sama karena beberapa alasan.
Pertama, berbagai negara atau benua yang berbeda mungkin membuat sistem koordinat referensi mereka sendiri dengan menggunakan kerangka koordinat yang berbeda. Kedua, kerangka koordinat yang berbeda memiliki ketidakpastian yang berbeda dan kesalahan sistematis yang berbeda juga. Ketiga, selisih antara kerangka koordinat yang berbeda dapat dideteksi oleh beberapa stasiun yang sama dengan koordinat posisi satelit yang berbeda. Keempat, parameter orbit satelit mungkin menghasilkan koordinat referensi yang dapat dimonitor oleh banyak jenis receiver GNSS. Kelima, sistem referensi koordinat harus mencakup informasi deformasi dinamis, dan kerangka acuan terbaru harus memiliki standar.
Sistem COMPASS/Beidou-II mengikuti aturan tentang kompatibilitas dan interoperabilitas yang ditetapkan oleh International Committee of GNSS (ICG) dalam pendefinisian posisi receiver di permukaan bumi, dimana harus mengacu kepada konsep sistem referensi yang disepakati secara internasional. Karena itu, pemerintah China merancang sebuah sistem koordinat untuk sistem COMPASS yang sesuai dengan InternationalTerrestrial Reference System (ITRS/CTS)
Sebelum dijelaskan mengenai sistem koordinat COMPASS, akan dijelaskan mengenai ITRS terlebih dahulu. ITRS adalah dasar untuk membangun sebuah kerangka dasar koordinat di bumi. Ketentuan umum dari ITRS adalah kesepakatan antara International Union of Geodesy and Geophysics (IUGG) dan International Astronomical Union (IAU). ITRS menyediakan datum jangka panjang yang “absolut”, yaitu perwujudan dari sumbu pusat terestris, skala, orientasi di bumi dan kondisi mereka di setiap saat.
71 Secara umum, karakteristik ITRS adalah sebagai berikut (Abidin, 2001) :
a) Sistem geosentrik, dimana pusat massa didefinisikan untuk seluruh permukaan bumi, termasuk lautan dan atmosfirnya.
b) Unit panjang yang digunakan adalah meter.
c) Sumbu-Z mengarah ke kutub referensi IERS pada epok 2000.
d) Orientasi awal diberikan oleh Bureau International de l’Heure (BIH) dengan orientasi 1984.
e) Evolusi waktu dari orientasi sistem koordinat akan menerapkan no-residual-global-rotation dalam konteks pergerakan lempeng di seluruh permukaan bumi.
f) Sumbu-X mengarah ke perpotongan antara bidang meridian Greenwich dengan bidang ekuator bumi pada epok 2000.
g) Sumbu-Y tegak lurus dengan sumbu X dan Z dan membentuk kaidah tangan kanan.
Realisasi dari ITRS adalah International Terrestrial Reference Frame (ITRF). Distribusi titik-titik ITRF di dunia dapat dilihat pada Gambar 4.9.
72 Untuk menentukan posisi pengguna di permukaan bumi, sistem COMPASS menggunakan sistem koordinat yang diberi nama Beidou Coordinate System (BDC). Sistem BDC bersifat global, tiga dimensi, right-handed, orthogonal, dan bersistem geosentrik. Sistem koordinat BDC direalisasikan dengan Beidou Terrestrial Reference Frame (BTRF). Sistem koordinat ini mengacu kepada China Geodetic Coordinate System 2000 (CGCS2000).
China Geodetic Coordinate System 2000 (CGCS2000) secara resmi digunakan sebagai sistem koordinat geodetik nasional China sejak bulan juli tahun 2008 dan akan menggantikan sistem koordinat nasional China yang lama. CGCS2000 konsisten dan mempunyai karakteristik yang sama dengan ITRS (Cheng et al, 2009).
Parameter utama dari ellipsoid referensinya hampir sama dengan parameter yang didefinisikan oleh ITRS dengan sumbu panjang (a), koefisien derajat harmonik (J2), dan kecepatan sudut bumi rata-rata (ω). Konstanta gravitasi (GM) mengikuti nilai yang diberikan oleh WGS-84. Pusat geometris dari elipsoid CGCS2000 sama dengan pusat bumi, dan sumbu rotasi dari elipsoid ini juga bertampalan dengan sumbu-Z (Cheng et al, 2009).
Parameter elipsoidnya adalah :
Semi-major axis (a) : 6378137 meters
Penggepengan (f) : 1/298.257222101
Konstanta gravitasi bumi (GM) : 3.986004418 m³/s² Kecepatan sudut rata-rata bumi (ω) : 7.292115×10e-5 rad/s
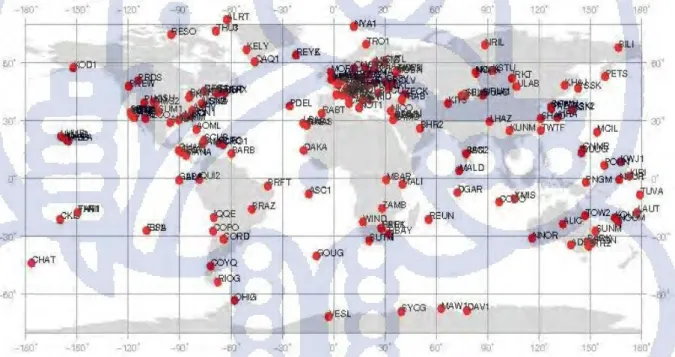
73 CGCS2000 direalisasikan dengan China Terrestrial Reference Frame 2000 (CTRF2000) yang terikat pada ITRF97 pada epok 2000. CTRF2000 menggunakan stasiun layanan GNSS internasional atau stasiun IGS dalam pengintegrasiannya dengan sistem ITR. Ada 47 stasiun termasuk stasiun IGS yang berada di China yang digunakan dalam integrasi penyesuaian dari CTRF. Konsistensi dalam definisi dan keragaman dalam realisasi akan bermanfaat untuk mengurangi dan mengkompensasi kesalahan sistematik (Yang et al, 2012).
Gambar 4.10 Distribusi stasiun IGS di dunia (IGS, 2010)
Dalam Gambar diatas terlihat distribusi posisi stasiun-stasiun International GNSS Service (IGS) di dunia. Stasiun-stasiun yang ditunjukkan oleh tanda panah adalah beberapa stasiun IGS yang digunakan oleh China Terrestrial Reference Frame 2000 (CTRF2000) sebagai stasiun pengintegrasi, termasuk beberapa stasiun yang berada di China, diantaranya stasiun BJFS, LHAZ dan KUNM (Yang et al, 2012).
74 China Terrestrial Reference Frame atau CTRF terdiri dari tiga tingkatan (orde), yaitu: 1) Tingkat pertama (orde 1) adalah IGS yang berada di China, yaitu BJFS, CHAN,
KUNM, LHAS, SHAO, URUM, WUHN dan XIAN dan Continuously Operating Reference Stations (CORS). Tingkat pertama CTRF ini berjumlah total sebanyak 28 stasiun yang diketahui memberikan nilai ketelitian 3 mm. Persebaran tingkat pertama CTRF ini dapat dilihat pada Gambar 4.11.
Gambar 4.11 Stasiun IGS dan CORS CTRF (orde I) yang terdapat di China (Yang et al, 2012)
Pada Gambar terlihat 28 stasiun orde I dalam CTRF, dimana 8 titik berwarna merah merupakan stasiun ICG yang berada di China dan 20 titik berwarna biru merupakan stasiun CORS.
2) Tingkat kedua (orde 2) adalah Jaring Kontrol Nasional GPS 2000 dengan persebaran sekitar 2500 stasiun pada tingkat ketelitian 3 cm (Yang et al, 2012).
3) Tingkat ketiga (orde 3) adalah jaringan gabungan dari Jaring Astro-Geodetik dan Jaring Kontrol Nasional GPS 2000, dengan persebaran 50000 stasiun pada tingkat ketelitian 3 dm tersebar di seluruh China (Yang et al, 2012)
Stasiun CORS Stasiun ICG
75 Walaupun karakteristik CTRF2000 dan BTRF (Beidou Terrestrial Reference Frame) bisa dikatakan konsisten dengan sistem referensi internasional, masih banyak bagian dari sistem ini yang harus diperbaiki atau lebih ditingkatkan. Keakuratan tingkatan CTRF2000 tidak begitu homogen. Hal ini terjadi karena hanya sebanyak 28 CORS dan sekitar 1000 stasiun pemantauan dengan tingkat akurasi tinggi yang digunakan dalam CGCS2000. Geometri dari China Terrestrial Reference Frame cukup lemah. BTRF masih belum stabil dan tidak terintegrasi dengan baik dalam CTRF2000. Pengukuran kecepatan pergeseran dan ketelitian titik tidak tersedia, hanya pengamatan untuk sistem GNSS saja yang dilakukan sampai saat ini (Yang et al, 2012).
Satu masalah lagi adalah bahwa informasi deformasi kerak bumi tidak termasuk dalam CTRF dan BTRF. Hal ini disebabkan karena tingkat akurasi CGCS2000 masih sangat lemah dibandingkan dengan sistem koordinat yang lebih maju di dunia. Karena kondisi itu, CTRF dan BTRF yang telah beroperasi selama kurang lebih 10 tahun ini mungkin akan mengalami masalah dalam kemampuan penentuan posisi yang sangat akurat, seperti pengukuran geodetik dan dinamika bumi (Yang et al, 2012).
Usaha yang dilakukan oleh pemerintah China dalam mengurangi dan mengatasi beberapa masalah itu adalah dengan meningkatkan jumlah stasiun CORS menjadi 260 stasiun, yang akan terdiri dari 3 stasiun yang dilokasikan sama dengan VLBI, 6 stasiun dengan stasiun SLR tetap dan pembangunan 232 stasiun baru. Stasiun daerah akan meningkat dari 1000 menjadi 2000 dan banyak lagi stasiun CORS nasional yang akan dibentuk dan diintegrasikan. BTRF akan terhubung dengan CTRF dan ITRF dengan proyek pengukuran baru. Untuk interoperabilitas, pembangunan stasiun BTRF di luar negeri akan dipertimbangkan. Penyesuaian terpadu dari stasiun BTRF dan pembaharuan stasiun CTRF akan dilakukan dengan cara melakukan pengukuran kembali (Yang et al, 2012).
76
4.5 Sistem waktu COMPASS
Dalam geodesi satelit , sistem waktu berperan pada pendefinisian sistem referensi koordinat, baik itu sistem CIS, CTS, elipsoid, ICRS maupun ITRS. Sistem waktu diperlukan untuk “menghubungkan” ukuran waktu yang biasa kita gunakan (tahun, bulan, hari, jam, menit, detik) dengan fenomena fisik maupun geometrik yang diukur/diamati. Disamping itu sistem waktu juga diperlukan dalam penentuan jarak ke satelit, penentuan orbit satelit, serta studi rotasi bumi dan parameter-parameter orientasi lainnya seperti pada Gambar 3.6 (Abidin, 2001). Perubahan waktu sekitar 1 nanosekon saja, akan membawa dampak yang sangat besar bagi parameter-parameter yang ditentukannya. Misalnya pada Gambar 4.12 dibawah ini.
Gambar 4.12 Efek kesalahan waktu dalam geodesi Satelit (Seeber, 1993)
Menurut Seeber (1993) :
kesalahan sebesar 2x10-5 detik saja akibat rotasi bumi, akan menyebabkan pergeseran posisi sebesar 1 cm pada titik di daerah ekuator (dT1)
kesalahan sebesar 1x10-6 detik, menyebabkan pergeseran posisi orbit satelit didekat bumi sebesar 1 cm (dT2)
kesalahan sebesar 1x10-10 detik pada waktu perjalanan sinyal, akan menyebabkan pergeseran jarak satelit ke bumi sebesar 1 cm (dT3).
77 Seperti sistem-sistem satelit navigasi lainnya, sistem satelit navigasi COMPASS juga mempunyai sistem waktu sendiri yang berperan sebagai acuan dalam penggunaannya terhadap berbagai macam aplikasi. Sistem waktu yang digunakan sebagai acuan atau referensi waktu pada Beidou Navigation Satellite System adalah Beidou Time (BDT).
BDT atau Beidou Time adalah sistem skala waktu navigasi pada satelit COMPASS yang bersifat internal dan kontinyu tanpa leap seconds atau detik kabisat. Unit satuan dasar pada BDT adalah detik dalam SI. Unit satuan terbesar yang digunakan adalah 1 minggu yang didefinisikan sebagai 604800 detik. BDT dalam operasinya dihitung dalam nomor minggu atau week number (WN) dan detik minggu atau second of week (SoW). Titik 0 BDT adalah pada 00:00:00 tanggal 1 januari 2006 (hari minggu) dalam sistem waktu UTC (Universal Time Coordinated) (CSNO, 2011).
Pada dasarnya, sistem waktu satelit menggunakan sistem waktu atom yang perhitungan waktunya berdasarkan pada osilasi elektromagnetik yang dikontrol atau dihasilkan oleh transisi kuantum dari suatu atom (Abidin, 2001). Namun akurasi dari setiap jam atom tersebut berbeda berdasarkan jenis mereka. Misalnya, jam atom pada UTC yang dijadikan acuan waktu atom universal, didasarkan pada bacaan rata-rata dari sekitar 70 jam atom Cessium dan beberapa Hidrogen Masser dari seluruh dunia. Atau sistem GALILEO buatan Eropa yang menggunakan frekuensi atom Rubidium sebagai dasar sistem waktu mereka.
Setiap negara atau organisasi pembangun sistem satelit navigasi memakai perhitungan atom yang berbeda dalam menentukan sistem waktu. Oleh karena itu, akan wajar nantinya bila terdapat sedikit perbedaan antara sistem waktu satelit navigasi mereka dengan UTC. Padahal, semua sistem waktu satelit navigasi haruslah mengacu pada satu referensi waktu yang universal, yaitu UTC. Oleh karena itu diperlukan suatu teknologi atau sistem yang bisa mengukur offset atau selisih waktu dari jam atom pada UTC dengan sistem waktu yang digunakan pada satelit sistem satelit. Sistem itu disebut Composite Clocks.
Composite Clocks menghitung offset atau selisih dari jam-jam atom yang menggunakan atom yang berbeda-beda tersebut dengan sistem waktu yang digunakan satelit, dimana selisih atau offset waktu dapat dipahami sebagai rata-rata yang tertimbang atau terukur dari selisih waktu dari jam atom (German Aerospace Center, 2012).
78 Menurut Han Chunhao (2012), BDT atau Beidou Time dihasilkan dari Composite Clocks, dipelihara dan diatur oleh sistem waktu dan frekuensi atau Time and Frequency System (TFS) yang berada pada Master Control Station (MCS) seperti yang telah dijelaskan pada bagian segmen kontrol COMPASS. TFS atau Time and Frequency System terdiri dari 5 elemen utama, yaitu :
a) Clock Set (CS),
b) Inter-Measurement Element (IME), c) Outer-Comparison Element (OCE), d) Data Processing Element (DPE) dan, e) Signal Generation Element (SGE).
Skema kerja dari Time and Frequency System ini dijelaskan pada Gambar 4.13.
Gambar 4.13 skema kerja TFS system (Han, 2010)
IME mengukur waktu asli dan frekuensi sinyal dari CS dan memberikan hasil perbedaan waktu dan frekuensi yang terjadi. Selisih dari BDT yang berhubungan dengan skala atau sistem waktu lainnya, terutama dengan UTC, diperoleh dari OCE. Kemudian DPE akan menyelesaikan perhitungan dan pemrosesan data dengan algoritma yang telah diberikan agar menghasilkan skala waktu yang relatif seragam sebagai acuan waktu untuk navigasi seluruh sistem. Skala waktu yang dihasilkan oleh DPE itu disebut BDT.
Sejalan dengan BDT, Signal Generation Element (SGE) akan melakukan penyesuaian frekuensi dengan sinyal frekuensi dari Master Control, dan menghasilkan waktu fisik yang nyata dan sinyal frekuensi yang diminta oleh MCS. Agar selalu se-konsisten mungkin dengan UTC, BDT akan melakukan proses penyesuaian frekuensi kembali setelah lebih dari 30 hari.
79 Perbedaan waktu antara BDT dan UTC selalu dipertahankan agar tetap dalam skala dibawah 100 ns. Sebagai contoh, selisih waktu atau time offset dari BDT dengan UTC yang didapat pada bulan juni hingga agustus 2010 dapat dilihat pada Gambar 4.14.
80
4.6 Perbandingan antar Sistem GNSS
Pada dasarnya tujuan semua sistem GNSS itu sama, namun mempunyai tujuan yang sama bukan berarti penyedia-penyedia layanan itu juga menawarkan kemampuan yang sama. Akan terdapat banyak perbedaan dalam hal sistem, aspek teknis, dan juga kemampuannya, sesuai dengan prinsip utama sistem satelit navigasi masing-masing. Bagian ini menjelaskan beberapa perbedaan antara sistem-sistem GNSS itu dari berbagai segi, diantaranya adalah :
4.6.1
Segmen angkasaTabel 4.13 memberikan perbedaan parameter segmen angkasa antara sistem GNSS yang ada. Tabel 4.13 Perbandingan parameter segmen angkasa GNSS
Parameter GPS GLONASS GALILEO COMPASS
Peluncuran
pertama 22–Feb–1978 12–Okt–1982 28–Des–2005 13–April–2007
Beroperasi penuh Februari 1995
Januari 1996 dan Desember 2011
2012, 2013 2007
Jumlah satelit 31 24 27 + 3 cadangan 35
Jenis satelit MEO MEO MEO
5 GEO 27 MEO 3 IGSO Ketinggian (MEO) 20.200 km 19.100 km 23.222 km 21.500 km Bidang orbit 6 3 3 6 Inklinasi orbit (MEO) 55° 64.8° 56° 55° Semi-major axis (MEO) 26.560 km 25.508 km 29.601 km 27840 km Perioda revolusi (MEO) 11h 57,96m 11h 15,73m 14h 4,75m 12h 50m
81 Parameter segmen angkasa yang dibandingkan pada Tabel 4.13 adalah parameter angkasa yang digunakan jika nanti semua sistem GNSS ini telah selesai dikembangkan, atau parameter angkasa yang direncanakan akan digunakan di masa depan. Perbedaan yang sangat signifikan pada parameter segmen angkasa antara sistem GNSS ini terletak pada jumlah satelit yang digunakan dan jenis-jenis satelit yang digunakan. Pada dasarnya sistem GNSS menggunakan satelit MEO pada segmen angkasa mereka. Hal ini terlihat pada adanya penggunaan satelit MEO di semua segmen angkasa sistem-sistem GNSS ini, namun jumlah satelit MEO yang digunakan berbeda-beda.
Yang menarik adalah adanya penggunaan jenis satelit selain satelit MEO pada segmen angkasa sistem COMPASS. Dimana sistem COMPASS menggunakan dua jenis satelit selain MEO yaitu satelit GEO dan satelit IGSO. Penggunaan satelit GEO dan IGSO yang sifatnya mempunyai perioda orbit yang sama dengan perioda rotasi bumi, diyakini berhubungan dengan sistem COMPASS yang masih dalam tahap pengembangan.
Maksudnya, China masih memerlukan banyak informasi mengenai sistem COMPASS untuk perencanaan sistem yang lebih efektif di masa depan, dan untuk pengembangan layanan dari regional menjadi global. Selain itu, sistem COMPASS direncanakan akan menyediakan akurasi dan visibilitas yang lebih baik di wilayah Asia, khususnya China, dibandingkan wilayah dunia lainnya Karena itu sistem COMPASS menggunakan satelit GEO yang ditempatkan sedemikian rupa, pada orbit yang selalu terlihat selama 24 jam dari wilayah China dan sekitarnya.
4.6.2
Visibilitas satelit dan DOP (Dillution of Precission) a) VisibilitasVisibilitas satelit biasanya mengacu kepada jumlah satelit atau sinyal yang tersedia bagi pengguna. Definisi visibilitas menurut US Federal Radionavigation Plan (FPR) mengacu pada persentase kemampuan waktu sistem dalam menyediakan solusi navigasi bagi pengguna (ESA navipedia, 2011).
82 Gambar 4.15a dan 4.15b berturut-turut merupakan hasil pemodelan dan prediksi distribusi visibilitas dari GPS dan COMPASS di dunia yang dilakukan oleh He-Chin Chen dan tim (Chen et al, 2009).
Hasil pemodelan distribusi visibilitas dilakukan menggunakan satelit MEO dengan mask angle = 15°. Konstelasi satelit sistem GPS, GALILEO, dan GLONASS yang digunakan adalah konstelasi satelit yang ada saat ini. Sedangkan visibilitas yang diberikan oleh sistem COMPASS merupakan prediksi visibilitas yang akan diberikan sistem COMPASS jika sistem ini telah stabil beroperasi.
a)
b)
83 Gambar 4.15 memberikan pemodelan dan prediksi distribusi visibilitas satelit GPS dan COMPASS di seluruh dunia. Wilayah yang berwarna paling biru atau nilai terkecil dari skala Number of visible satellite (NVS) merupakan wilayah yang paling sedikit mendapatkan visibilitas satelit. Sedangkan wilayah yang berwarna paling coklat atau punya nilai NVS paling besar merupakan wilayah dunia yang mempunyai kemampuan visibiltas satelit terbanyak.
Pada kasus GPS misalnya, dalam Gambar 4.15a, pengguna pada wilayah khatulistiwa dan wilayah kutub dapat menerima sinyal dari satelit GPS yang lebih banyak jika dibandingkan dengan wilayah lainnya. Kedua wilayah itu akan menerima sinyal dari 9 hingga 10 satelit GPS dalam satu waktu pengamatan. Pada dasarnya Gambar 4.15a menunjukkan keseragaman distribusi visibilitas satelit GPS di seluruh dunia
Sedangkan pada kasus COMPASS, Gambar 4.15b, hanya sebagian besar wilayah Asia dan Australia (termasuk Indonesia) yang mendapatkan sinyal dari lebih banyak satelit. Wilayah ini akan mendapatkan sinyal dari 13 hingga 18 satelit dalam satu waktu pengamatan.
Selanjutnya Gambar 4.16 merupakan distribusi visibilitas satelit GALILEO di seluruh dunia yang tampak sama dengan distribusi visibilitas satelit GPS yaitu terdistribusi seragam. Perbedaannya terletak pada jumlah minimum satelit yang bisa terdeteksi yaitu, hanya 6 satelit GALILEO pada konfigurasi pemodelan yang sama dengan GPS (ESA, 2012).
84 Gambar 4.17 menunjukkan pemodelan persebaran visibilitas satelit GLONASS di seluruh dunia, berdasarkan pengamatan menggunakan parameter yang sama dengan pemodelan tiga satelit sebelumnya (Eissfeller et al, 2007).
Gambar 4.17 GLONASS global visibility (Eissfeller, 2007)
Dalam gambar terlihat persebaran visibilitas satelit GLONASS yang tidak merata jika dibandingkan dengan satelit GNSS lainnya. Bahkan wilayah Asia tengah tidak mendapatkan visibilitas sama sekali, terlihat dari NVS nya yang bernilai 0. Namun wilayah kutub utara dan selatan mendapatkan nilai visibilitas yang baik, yaitu diatas 4 satelit. Saat ini Rusia tengah memodifikasi dan memodernisasi sistem satelit global mereka sehingga mendapatkan kemampuan yang lebih baik dari sistem yang telah ada sebelumnya.
b) DOP atau Dilution of Precision
DOP atau Dilution of Precision adalah istilah yang menggambarkan kekuatan akurasi dan konfigurasi dari geometri satelit. Ketika satelit yang muncul berdekatan di atas langit, geometrinya menjadi lemah dan DOP-nya tinggi. Namun ketika berjauhan maka geometrinya menjadi kuat dan nilai DOP menjadi rendah, sehingga dengan rendahnya nilai DOP maka keakuratan posisi GNSS menjadi lebih baik. Dalam prakteknya, berbagai bentuk DOP digunakan tergantung pada kebutuhan. Misalnya untuk keperluan umum penentuan posisi GPS, pengguna mungkin tertarik dalam meneliti efek dari geometri satelit pada kualitas yang dihasilkan posisi 3-D (lintang, bujur, dan ketinggian) kontelasi satelit. Hal ini dapat dilakukan dengan memeriksa nilai GDOP-nya.
85 Apabila nilai GDOP berkurang, berarti jumlah visibilitas satelit yang digunakan meningkat, dan apabila nilai visibilitas satelit rendah, maka nilai GDOP akan semakin besar. Pada umumnya, besarnya nilai GDOP berbanding terbalik dengan besarnya nilai visibilitas satelit, namun juga tergantung kepada distribusi geometri yang dibentuk oleh satelit-satelit yang terlibat (Lapan, 2005).
Keterangan nilai GDOP dapat dilihat dari Tabel 4.14 (Yuen, 2009). Tabel 4.14 Keterangan nilai GDOP
Nilai
GDOP Rating Keterangan
1 Ideal Tingkat akurasi tinggi
2 – 3 Excellent Pengukuran cukup akurat, kecuali pada aplikasi tertentu 4 – 6 Good Ketelitian minimum dalam pengambilan keputusan 7 – 8 Moderat Hasil pengukuran kurang direkomendasikan
9 – 20 Fair Hanya untuk pengukuran secara kasar, bukan detail 21 – 50 Poor Pengukuran harus dihindarkan
Gambar 4.18 menunjukkan persebaran GDOP dari sistem GPS pada parameter pemodelan yang sama yang digunakan dalam pemodelan distribusi visibilitas satelit sebelumnya.
86 Pada Gambar 4.18 dapat dilihat, daerah sekitar ekuator bumi mempunyai nilai GDOP yang paling kecil yaitu 1.96. Hal ini membuat pengguna GPS di sekitar equator akan mendapatkan tingkat akurasi yang tinggi. Namun jika dilihat pada daerah kutub, nilai GDOP membesar walaupun tingkat visibilitas satelit disana relatif tinggi. Ini menunjukkan ketidak konsistenan hubungan antara visibilitas dan nilai DOP-nya. Menurut Chen et al(2009), hal ini disebabkan oleh buruknya distribusi geometri satelit GPS di daerah kutub.
Selanjutnya, Gambar 4.19 merupakan prediksi persebaran nilai GDOP sistem COMPASS di seluruh dunia menggunakan konstelasi satelit yang direncanakan.
Gambar 4.19 COMPASS global GDOP (Chen et al, 2009)
Distribusi nilai GDOP sistem COMPASS dapat dilihat pada gambar 4.19. Disana terlihat wilayah sekitar Asia mempunyai nilai GDOP paling kecil, hubungannya konsisten dengan hasil pemodelan distribusi visibilitas sebelumnya. Dengan demikian para pengguna sistem COMPASS di wilayah tersebut akan mendapatkan tingkat akurasi yang tinggi, sejalan dengan tingginya nilai visibilitas satelit pada wilayah itu,. Pada wilayah kutub dan wilayah Amerika, COMPASS mempunyai tingkat akurasi yang lebih buruk. Dapat dilihat dari tingginya nilai GDOP pada wilayah tersebut yang mencapai angka 2.5, meskipun dalam skala yang masih bagus.
87 Gambar 4.20 menunjukkan distribusi nilai GDOP dari sistem GALILEO di seluruh dunia. Pemodelan dilakukan dengan menggunakan parameter pemodelan yang sama dengan yang dilakukan pada sistem-sistem lainnya (Eissfeller, 2007).
Gambar 4.20 Galileo global GDOP (Eissfeller, 2007)
Lain lagi pada kasus sistem GALILEO. Jika dilihat pada Gambar 4.20, wilayah Eropa dan sekitarnya tepatnya disepanjang daerah lintang 60° utara dan lintang 60° selatan bumi, terlihat mempunyai nilai GDOP paling kecil. Dengan demikian, pengguna sistem GALILEO akan mendapatkan tingkat akurasi paling baik di wilayah itu dibandingkan dengan wilayah lainnya di dunia. Wilayah dengan tingkat akurasi terburuk pada sistem GALILEO berada pada wilayah antara lintang 20° hingga 30°, baik daerah utara maupun selatan bumi. Sedangkan pada wilayah kutub, hubungan antara tingkat visibilitas dan nilai GDOP terbilang konsisten.
88 Jika disimpulkan, perbedaan keempat sistem ini berdasarkan pemodelan dan prediksi visibilitas dan GDOP globalnya, dapat dilihat pada Tabel 4.15 berikut.
Tabel 4.15 Perbandingan GNSS berdasarkan visibilitas dan GDOP global
Sistem Visibilitas GDOP Kualitas posisi
Min Max Min Max Baik di Buruk di
GPS 8.483 10.48 1.961 2.757 Wilayah ekuator Wilayah kutub
GALILEO 6.000 9.000 1.57 2.85 Wilayah lintang
60° dan kutub Wilayah lintang 20° - 30°
GLONASS 0 >4 - - Tidak merata Tidak merata
COMPASS 7.583 17.30 1.722 2.545 Asia, China, dan sekitarnya
Amerika, Afrika, dan wilayah kutub
Sementara itu, untuk perbedaan sistem GNSS berdasarkan visibilitas dan GDOP nya di wilayah Indonesia diberikan pada Tabel 4.16.
Tabel 4.16 Perbandingan GNSS berdasarkan visibilitas dan GDOP di Indonesia
Sistem Visibilitas GDOP
Min Max Min Max
GPS 9.678 10.08 1.961 2.120
GALILEO 7.800 8.700 2.21 2.33
GLONASS 1 3 - -
89
4.6.3
Sinyal dan frekuensiTabel 4.17 dibawah ini memberikan perbedaan parameter sinyal dan frekuensi pembawa yang digunakan dari masing-masing sistem GNSS.
Tabel 4.17 Perbandingan sinyal dan frekuensi
Parameter GPS GLONASS GALILEO COMPASS
Coding CDMA FDMA CDMA CDMA
Notasi L1, L2, L5 G1, G2, G3 E1, E5a, E5b, E6 B1, B1-2, B2, B3
Frekuensi (MHz) L1 : 1575.42 L2 : 1227.60 L5 : 1176.45 G1 : 1602 G2 : 1246 G3 : TBD E1 : 1575.42 E5a : 1176.45 E5b : 1207.14 E6 : 1278.75 B1 : 1561.1 B1-2 : 1589.74 B2 : 1207.14 B3 : 1268.52
Jika dilihat secara seksama pada Tabel 4.17 tepatnya di bagian frekuensi yang digunakan, akan terlihat bahwa ada beberapa sinyal yang digunakan oleh keempat sistem itu berada pada frekuensi yang hampir sama. Perhatikan Gambar 4.21 berikut.
90 Gambar 4.21 menunjukkan rencana frekuensi GPS, GALILEO dan COMPASS dalam tiga panel yang terpisah. Panel paling atas menunjukkan sinyal GPS yang akan ditransmisikan setelah peluncuran satelit GPS-III. Panel tengah adalah frekuensi GALILEO dan panel paling akhir merupakan tiga sinyal COMPASS yang dimonitor oleh Centre National d’Etudes Spatiales (CNES). Lebih jauh lagi, pada 2 panel teratas, sinyal GALILEO dan GPS ditunjukkan secara berturut-turut menggunakan warna abu-abu. Pada panel terakhir, sinyal GPS dan GALILEO ditunjukkan dengan warna latar abu-abu sementara spektrum sinyal COMPASS berwarna beige.
Berdasarkan penjelasan dari Gambar 4.21, beberapa sinyal COMPASS mengalami overlay atau tumpang-tindih dengan sinyal GNSS lainnya, dalam hal ini GPS dan GALILEO. Sinyal-sinyal itu adalah :
Sinyal COMPASS B1 pada frekuensi 15751.42 MHz dengan sinyal GPS L1 Sinyal COMPASS B2 pada frekuensi 1176.45 MHz dengan sinyal GPS L5 Sinyal COMPASS B2b pada frekuensi 1207.14 MHz dengan sinyal GALILEO
E5b
Menurut Scott Pace (2010), China percaya bahwa “tumpang tindihnya spektrum frekuensi sinyal terbuka bermanfaat untuk mewujudkan interoperabilitas pada banyak aplikasi, dan membuat lebih mudah dalam mengembangkan dan memproduksi penerima interoperabel. Meskipun pernyataan China itu benar pada dari suatu sudut pandang, penyedia layanan GNSS yang sinyalnya mengalami tumpang tindih mungkin saja tidak setuju. Bahkan walaupun tumpang tindih sinyal itu tidak menyebabkan gangguan, penyedia sinyal mungkin akan mengalami kendala dalam kemampuannya mengontrol layanan pada sinyal itu.
Misalnya pada kasus tumpang tindih sinyal antara COMPASS dan GALILEO, sinyal COMPASS itu mengalami overlap pada layanan Galileo Publicity Regulated Service (PRS), yaitu sebuah layanan yang bersifat melindungi informasi penggunaya. Dan pada kasus antara COMPASS dengan GPS dimana sinyal COMPASS overlap dengan sinyal pertahanan GPS. Pada kasus ini mungkin COMPASS akan mengalah pada GPS dan mencari cara agar sinyal itu tidak lagi overlap, alasannya sistem GPS merupakan “senior” bagi sistem COMPASS dan pendatang baru haruslah mengalah. Namun lain hal nya dengan GALILEO, China beranggapan bahwa COMPASS dan GALILEO merupakan sama-sama pendatang baru dalam dunia GNSS (Pace, 2010).
91
4.6.4
Sistem waktu dan koordinatPerbedaan antara GPS, GLONASS, GALILEO dan COMPASS dalam segi sistem waktu dan koordinat yang digunakan dapat dilihat pada Tabel 4.18.
Tabel 4.18 Perbandingan sistem waktu dan koordinat
Parameter GPS GLONASS GALILEO COMPASS
Geodetic reference WGS-84 PE-90 GTRF CGSG2000 Semi-major axis ellipsoid (a) 6378137 m 6378136 m 6378137 m 6378137 m Flattening (f) 1/298.257223563 1/298.257839303 1/298.257223563 1/298.257222101 Konstanta gravitasi bumi (GM) 3.986004418 m³/s² 3.986004418 m³/s² 3.986004418 m³/s² 3.986004418 m³/s² Kecepatan sudut bumi rata-rata (ω) 7.292115x10e-5 rad/s 7.292115x10e-5 rad/s 7.292115x10e-5 rad/s 7.292115x10e-5 rad/s
Time system GPS Time GLONASS time GALILEO
System Time Beidou Time
Leap second No Yes No No
Dari tabel diatas dapat disimpulkan bahwa sistem referensi geodetik atau datum geodetik yang digunakan China (CGCS2000) mempunyai prinsip yang sama dengan WGS 84 yang digunakan oleh sistem GPS. CGCS2000 merupakan sistem koordinat yang terikat kepada stasiun-stasiun IGS yang berada di China sebagai orde pertamanya, dimana stasiun IGS itu menggunakan dua GNSS utama dalam pengukurannya, yaitu sistem GPS dan GLONASS.
92 Pada awalnya elipsoid referensi yang digunakan CGCS2000 sama dengan elipsoid referensi yang digunakan WGS84 yaitu elipsoid GRS80. Namun seiring berjalannya waktu, WGS84 melakukan pembaruan pada nilai flattening atau penggepengannya. Pembaruan itu secara langsung juga membuat perbedaan nilai flattening antara CGCS2000 dengan WGS84. Hal ini menyebabkan selisih pada nilai hasil perhitungan sumbu semi minornya (b), dimana besar selisihnya adalah sekitar 0.104 mm. Sebagian besar selisih yang terjadi ini penting untuk perhitungan orbit satelit berpresisi tinggi, namun hanya memiliki sedikit pengaruh dalam penggunaannya pada pengukuran topografi (wikipedia.org, 2012).
Cheng Pengfei et al (2009) melakukan penelitian pengaruh perbedaan antara elipsoid CGCS2000 dengan elipsoid WGS84 itu. Mereka menyatakan bahwa perbedaan antara dua elipsoid itu hanya terdapat dalam nilai koordinat dan nilai gravitasi normal pada daerah lintang yang sama. Perbedaan itu dijelaskan pada Gambar 4.22 dan 4.23.
Gambar 4.22 Perbedaan nilai lintang CGCS2000 dengan WGS84 (Cheng et al, 2009)
Gambar 4.22 adalah gambar yang memberikan besarnya selisih atau perbedaan nilai koordinat yang didapatkan pada daerah lintang yang sama antara dua elipsoid tersebut. Dimana perbedaan nilai maksimum yang didapatkan adalah sekitar ± 3.6 x 10-6 arc second
atau setara dengan 0.11 mm pada lintang 50°. Sedangkan pada lintang 0° atau daerah ekuator tidak terdapat perbedaan nilai antara dua elipsoid tersebut.
93
Gambar 4.23 Perbedaan nilai gravitasi normal CGCS2000 dengan WGS84 (Cheng et al, 2009)
Gambar 4.23 memberikan besarnya perbedaan nilai gravitasi normal pada lintang 0° hingga bujur 100° antara dua elipsoid tersebut. Disana terlihat perbedaan nilai gravitasi normal maksimum yang terjadi adalah pada daerah lintang 0° yang mencapai 0.02 x 10-8m/s²
,
dan beda nilai gravitasi normal minimum yang didapatkan antara dua elipsoid tersebut adalah 0.004 x 10-8 m/s²
.
Kesimpulannya, perbedaan yang terjadi antara elipsoid CGCS2000 dan WGS84 yang didapatkan saat ini bisa diabaikan karena bernilai sangat kecil, dan hanya terdapat pada lintangnya saja. Sedangkan bujur kedua elipsoid ini bernilai sama, tidak terdapat perbedaan sedikitpun. Hal ini juga membuktikan bahwa sistem geodetik CGCS2000 milik China pada prinsipnya adalah sama dan konsisten dengan sistem geodetik WGS84 (Yang, 2009).