Abstrak— Quadcopter merupakan jenis pesawat tanpa awak yang memiliki kemampuan untuk take off, landing, hover, way point tracking, acrobatic, dan lain sebagainya. Seiring dengan perkembangan teknologi modern, saat ini quadcopter memiliki banyak kegunaan diantaranya pengawasan area, pengambilan foto/video, pelaksanaan misi yang beresiko tinggi dan lain-lain. Kestabilan hover pada quadcopter sangatlah penting dan harus dimiliki quadcopter agar quadcopter dapat melakukan berbagai macam manuver . Kontrol hover merupakan prioritas utama dalam setiap upaya pengendalian quadcopter baik pada pengendalian fase take-off, landing, dan tracking trajectory, hal ini dikarenakan kesalahan yang kecil saja yang terjadi pada sudut atau ketinggian quadcopter dapat menyebabkan quadcopter berubah posisi baik terhadap sumbu x, y, maupun z.
Pada Tugas Akhir ini, digunakan kontroler Nonlinier Quadratik Regulator (NQR) dengan nilai parameter didapat dari hasil tuning untuk mengatasi masalah hover. Didapatkan nilai parameter kontrol LQR dari hasil tuning diperoleh parameter R=1 dan Q=9000 untuk gerak translasi maupun rotasi, dimana pada simulasi dapat
terbang hover pada ketinggian 3 m, dan dapat mengatasi gangguan.
Kata Kunci— Quadcopter, Hover, NQR, Kontrol Optimal.
I. PENDAHULUAN
Teknologi autopilot atau pesawat tanpa awak saat ini sangat berkembang. Teknologi autopilot memiliki banyak manfat diantaranya untuk pengamatan lalu lintas kendaraan, sarana pengantar barang, teknologi pengintai, pengawasan daerah- daerah berbahaya( daerah bencana, pertambangan) dan lain sebagainya. Salah satu teknologi autopilot yang sedang berkembang adalah quadcopter.
Quadcopter adalah kendaraan yang memiliki potensi utuk lepas landas (take off), melayang(hover), terbang manuver, dan pendarat(landing) di berbagai daerah. Prinsip kerja dari quadcopter mirip dengan helicopter dimana quadcopter dapat melakukan teka off dan landing secara vertical. Akan tetapi quadcopter adalah sistem yang tidak stabil sehingga berpotensi menjadi sulit untuk terbang. Dalam pemanfaatan
quadcopter kestabilan hover sangatlah penting dan harus dimiliki quadcopter agar dapat dimanfaatkan secara maksimal. Oleh karena itu dibutuhkan suatu cara untuk mengatur kestabilan hover dari quadcopter ini agar dapat mempertahankan posisinya secara stabil meski terjadi gangguan pada saat hover.
Dalam penelitian ini membahas tentang kestabilan hover pada quadcopter dengan kontroler Nonlinear Quadratik Regulator. Dimana kontroler ini dapat menstabilkan gerak rotasi roll dan pitch serta gerak translasi X,Y dan Z.
II. TEORIPENUNJANG
Dalam bab ini dibahas mengenai teori-teori yang berkaitan dengan topik penelitian yang dilakukan. Dasar teori pada bab ini meliputi pendahuluan tentang quadcopter, perangkat keras penyusun quadcopter, kontroler Nonlinear Quadratic Regulator, dan beberapa teori mengenai pemodelanfisik dari quadcopter.
A. Pergerakan Quadcopter
Quadcopter memiliki 6 defree of freedom (DoF) dengan 12 keluaran, 6 keluaran dari 12 keluaran ini menentukan attitude dari quadcopter. Variabel-variabel tersebut adalah
x = posisi quadcopter terhadap sumbu Xe y = posisi quadcopter terhadap sumbu Ye z = posisi quadcopter terhadap sumbu Ze 𝑢 = kecepatan quadcopter diukur pada sumbu Xb 𝑣 = kecepatan quadcopter diukur pada sumbu Yb 𝑤 = kecepatan quadcopter diukur pada sumbu Zb 𝜙 = sudut roll terhadap sumbu Xe
𝜃 = sudut pitch terhadap sumbu Ye 𝜓 = sudut yaw terhadap sumbu Ze
𝑝 = kecepatan sudut roll diukur pada sumbu Xb 𝑞 = kecepatan sudut pitch diukur pada sumbu Yb 𝑟 = kecepatan sudut yaw diukur pada sumbu Zb
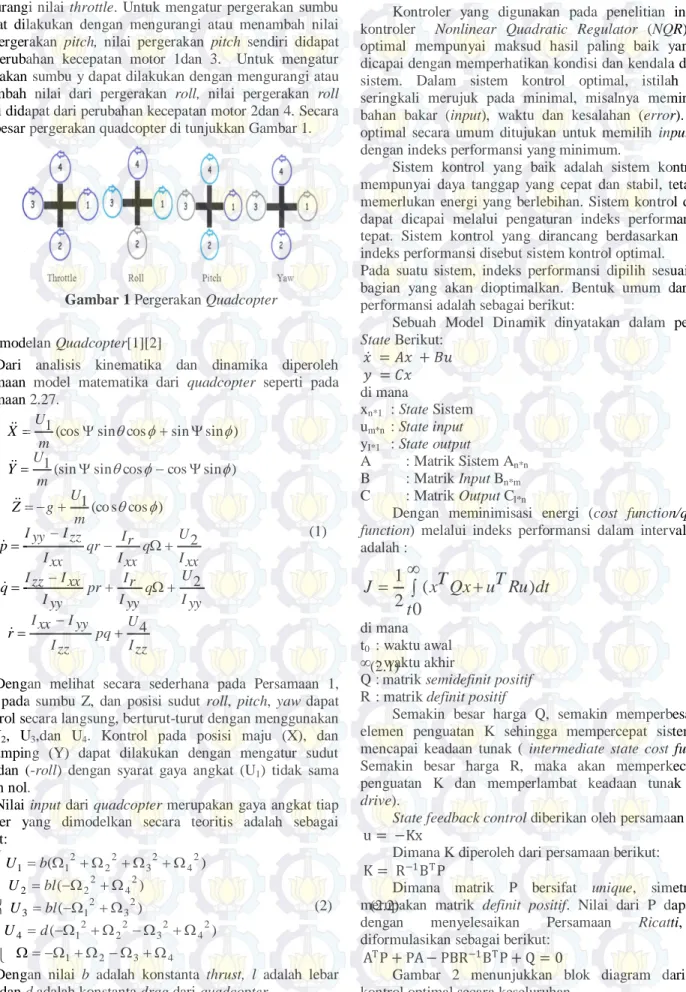
Quadcopter memiliki 4 buah rotor sebagai penggerak baling-baling yang digunakan untuk menghasilkan gaya angkat. Untuk bergerak naik, diperlukan kecepatan yang sama dan cukup besar pada keempat rotornya. Secara garis besar, gerakan quadcopter terbagi menjadi empat yaitu gerakan throttle, gerakan roll, gerakan pitch, gerakan yaw. Untuk
Perancangan dan Implementasi
Kontroler Nonlinier Quadratic Regulator
untuk Kestabilan Hover
pada Quadcopter
Sonny Prismanto, Rusdhianto Effendi AKJurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
melakukan pergerakan pada sumbu z maka cukup menambah/ mengurangi nilai throttle. Untuk mengatur pergerakan sumbu x dapat dilakukan dengan mengurangi atau menambah nilai dari pergerakan pitch, nilai pergerakan pitch sendiri didapat dari perubahan kecepatan motor 1dan 3. Untuk mengatur pergerakan sumbu y dapat dilakukan dengan mengurangi atau menambah nilai dari pergerakan roll, nilai pergerakan roll sendiri didapat dari perubahan kecepatan motor 2dan 4. Secara garis besar pergerakan quadcopter di tunjukkan Gambar 1.
Gambar 1 Pergerakan Quadcopter B. Pemodelan Quadcopter[1][2]
Dari analisis kinematika dan dinamika diperoleh Persamaan model matematika dari quadcopter seperti pada Persamaan 2.27. zz I U pq zz I yy I xx I r yy I U q yy I r I pr yy I xx I zz I q xx I U q xx I r I qr xx I zz I yy I p m U g Z m U Y m U X 4 2 2 ) cos s (co 1 ) sin cos cos sin (sin 1 ) sin sin cos sin (cos 1 (1) (2.1) Dengan melihat secara sederhana pada Persamaan 1,
posisi pada sumbu Z, dan posisi sudut roll, pitch, yaw dapat dikontrol secara langsung, berturut-turut dengan menggunakan U1, U2, U3,dan U4. Kontrol pada posisi maju (X), dan menyamping (Y) dapat dilakukan dengan mengatur sudut pitch dan (-roll) dengan syarat gaya angkat (U1) tidak sama dengan nol.
Nilai input dari quadcopter merupakan gaya angkat tiap propeler yang dimodelkan secara teoritis adalah sebagai berikut: 4 3 2 1 2 4 2 3 2 2 2 1 4 2 3 2 1 3 2 4 2 2 2 2 4 2 3 2 2 2 1 1 ) ( ) ( ) ( ) ( d U bl U bl U b U (2) (2.2)
Dengan nilai b adalah konstanta thrust, l adalah lebar frame dan d adalah konstanta drag dari quadcopter.
C. Kontroler NQR.
Kontroler yang digunakan pada penelitian ini adalah kontroler Nonlinear Quadratic Regulator (NQR). Istilah optimal mempunyai maksud hasil paling baik yang dapat dicapai dengan memperhatikan kondisi dan kendala dari suatu sistem. Dalam sistem kontrol optimal, istilah optimal seringkali merujuk pada minimal, misalnya meminimalkan bahan bakar (input), waktu dan kesalahan (error). Kontrol optimal secara umum ditujukan untuk memilih input plant u dengan indeks performansi yang minimum.
Sistem kontrol yang baik adalah sistem kontrol yang mempunyai daya tanggap yang cepat dan stabil, tetapi tidak memerlukan energi yang berlebihan. Sistem kontrol demikian dapat dicapai melalui pengaturan indeks performansi yang tepat. Sistem kontrol yang dirancang berdasarkan optimasi indeks performansi disebut sistem kontrol optimal.
Pada suatu sistem, indeks performansi dipilih sesuai dengan bagian yang akan dioptimalkan. Bentuk umum dari indeks performansi adalah sebagai berikut:
Sebuah Model Dinamik dinyatakan dalam persamaan State Berikut: 𝑥 = 𝐴𝑥 + 𝐵𝑢 (3) 𝑦 = 𝐶𝑥 (4) di mana xn*1 : State Sistem um*n : State input yI*1 : State output
A : Matrik Sistem An*n B : Matrik Input Bn*m C : Matrik Output Cl*n
Dengan meminimisasi energi (cost function/quadratic function) melalui indeks performansi dalam interval [t0 , ∞] adalah :
0
)
(
2
1
t
dt
Ru
T
u
Qx
T
x
J
(5) di mana t0 : waktu awal ∞ : waktu akhirQ:matrik semidefinit positif R : matrik definit positif
Semakin besar harga Q, semakin memperbesar harga elemen penguatan K sehingga mempercepat sistem untuk mencapai keadaan tunak ( intermediate state cost function ). Semakin besar harga R, maka akan memperkecil harga penguatan K dan memperlambat keadaan tunak (energy drive).
State feedback control diberikan oleh persamaan berikut:
u = −Kx (6)
Dimana K diperoleh dari persamaan berikut:
K = R−1BTP (7)
Dimana matrik P bersifat unique, simetris, dan merupakan matrik definit positif. Nilai dari P dapat dicari dengan menyelesaikan Persamaan Ricatti, yang diformulasikan sebagai berikut:
ATP + PA − PBR−1BTP + Q = 0 (8) Gambar 2 menunjukkan blok diagram dari system kontrol optimal secara keseluruhan.
Gambar 2. Diagram Blok Sistem Kontrol Optimal
III. PERANCANGAN SISTEM
A. Spesifikasi Sistem
Quadcopter sebagai pesawat tanpa awak yang dapat bergerak dengan 6 dof (degree of freedom), terdiri dari 3 dof rotasi dan 3 dof translasi,akan dibuat menjadi spesifikasi sistem tertentu secara hardware maupun simulasi pada matlab dapat diuraikan sebagai berikut:
a. Quadcopter dapat bergerak 6 derajat kebebasan, dan dapat mengikuti gerak translasi pada sumbu X maupun sumbu Y.
b. Quadcopter dapat digerakkan secara manual dengan menggunakan remote control.
c. Quadcopter dapat menjaga kondisi hover saat mode autonomous diaktifkan.
d. Data-data sensor dan aktuator dikirimkan ke ground station.
B. Perancangan Perangkat Keras
Perancangan perangkat keras pada tugas akhir ini terdiri dari dua bagian yaitu rancang bagun mekanik quadcopter dan desain sistem elektronik.
1. Desain Mekanik Quadcopter
Sistem mekanik yang baik akan mendukung pergerakan quadcopter menjadi lebih baik, oleh karena itu perancangan mekanik dalam hal ini frame dan dudukan motor haruslah proporsional dengan titik beban quadcopter.
2. Desain Sistem Elektronik
Sistem elektronika yang ada pada quadcopter terdiri atas sistem kontroler yang berupa mikrokontroler dan beberapa sensor yang digunakan sebagai acuan dalam menentukan gerak terbangnya. Sensor yang digunakan adalah sensor ketinggian yang diukur menggunakan sensor ultrasonik ping))), sensor orientasi untuk membaca sudut rotasi dari quadcopter yang diukur menggunakan sensor IMU (Inertial Measurement Unit).
Rangkaian elektronika yang dirancang harus mampu menangani jumlah input/output sensor dan komponen-komponen yang digunakan dalam penunjang terbang quadcopter. Beberapa komponen seperti sensor-sensor, ESC, dan motor merupakan modul yang dapat langsung digunakan ketika dibeli dipasaran.
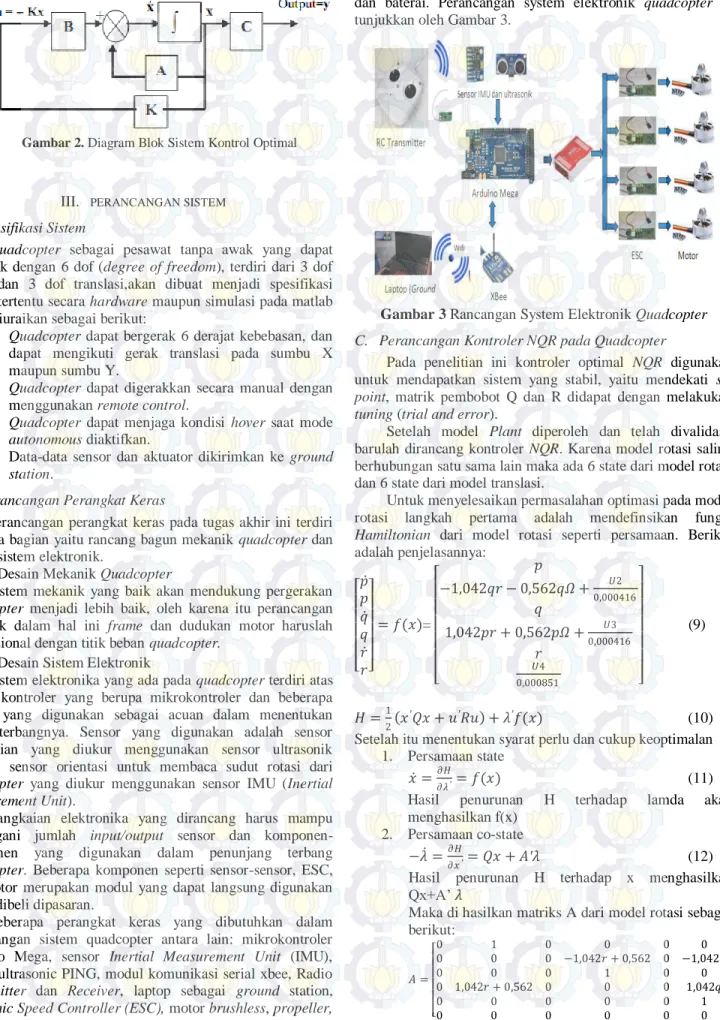
Beberapa perangkat keras yang dibutuhkan dalam perancangan sistem quadcopter antara lain: mikrokontroler Arduino Mega, sensor Inertial Measurement Unit (IMU), sensor ultrasonic PING, modul komunikasi serial xbee, Radio Transmitter dan Receiver, laptop sebagai ground station, Elecronic Speed Controller (ESC), motor brushless, propeller,
dan baterai. Perancangan system elektronik quadcopter di tunjukkan oleh Gambar 3.
Gambar 3 Rancangan System Elektronik Quadcopter C. Perancangan Kontroler NQR pada Quadcopter
Pada penelitian ini kontroler optimal NQR digunakan untuk mendapatkan sistem yang stabil, yaitu mendekati set point, matrik pembobot Q dan R didapat dengan melakukan tuning (trial and error).
Setelah model Plant diperoleh dan telah divalidasi, barulah dirancang kontroler NQR. Karena model rotasi saling berhubungan satu sama lain maka ada 6 state dari model rotasi dan 6 state dari model translasi.
Untuk menyelesaikan permasalahan optimasi pada model rotasi langkah pertama adalah mendefinsikan fungsi Hamiltonian dari model rotasi seperti persamaan. Berikut adalah penjelasannya: 𝑝 𝑝 𝑞 𝑞 𝑟 𝑟 = 𝑓(𝑥)= 𝑝 −1,042𝑞𝑟 − 0,562𝑞𝛺 + 𝑈2 0,000416 𝑞 1,042𝑝𝑟 + 0,562𝑝𝛺 + 𝑈3 0,000416 𝑟 𝑈4 0,000851 (9) 𝐻 =1 2 𝑥 ′𝑄𝑥 + 𝑢′𝑅𝑢 + 𝜆′𝑓(𝑥) (10)
Setelah itu menentukan syarat perlu dan cukup keoptimalan 1. Persamaan state
𝑥 =𝜕𝐻
𝜕𝜆′= 𝑓(𝑥) (11) Hasil penurunan H terhadap lamda akan menghasilkan f(x)
2. Persamaan co-state −𝜆 =𝜕𝐻
𝜕𝑥′= 𝑄𝑥 + 𝐴′𝜆 (12) Hasil penurunan H terhadap x menghasilkan Qx+A’ 𝜆
Maka di hasilkan matriks A dari model rotasi sebagai berikut: 𝐴 = 0 1 0 0 0 0 0 0 0 −1,042𝑟 + 0,562 0 −1,042𝑞 0 0 0 1 0 0 0 1,042𝑟 + 0,562 0 0 0 1,042𝑞 0 0 0 0 0 1 0 0 0 0 0 0
(13) 3. Syarat stasioner
𝜕𝐻
𝜕 𝑢′= 0 = 𝑅𝑢 + 𝐵′𝜆 (14) Maka didapatkan matrik B sebagai berikut:
𝐵 = 0 0 0 2403,8 0 0 0 0 0 0 02403,8 0 0 0 0 0 0 1175,08 (15)
Maka diperoleh matriks A dan B untuk model rotasi pada persamaan 13 dan 15.
Berbeda dengan model rotasi, model translasi dapat dikontrol secara independent karena satu sama lain tidak saling mempengaruhi. Akan tetapi karena modelnya tidak linier maka digunakan cara yang sama untuk menentukan matriks A dan B untuk model translasi.
Berikut nilai dari matriks A dan B utuk gerak translasi x,y dan z: Gerak translasi X: A= 0 1 0 0 (16) B= 0 𝑠𝑖𝑛𝜓𝑠𝑖𝑛𝜙 + 𝑐𝑜𝑠𝜓𝑐𝑜𝑠𝜃𝑐𝑜𝑠𝜙 𝑈1 0,775 (17) Gerak translasi Y: A= 0 10 0 (18) B= 0 −𝑐𝑜𝑠𝜓𝑐𝑜𝑠𝜙 + 𝑠𝑖𝑛𝜓𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜙 𝑈1 0,775 (19) Gerak translasi Z: A= 0 1 0 0 (20) B= 𝑐𝑜𝑠𝜃𝑐𝑜𝑠𝜙 0 𝑈1 0,775 (21)
Bobot matriks R=1 sedangkan bobot matriks Q untuk gerak rotasi adalah matriks diagonal 6x6 dengan nlai diagonal 9000 sedangkan untuk gerak translasi adalah matriks diagonal 2x2 dengan nilai diagonal 9000 .
Gain matrik K dihitung dengan menggunakan library ARE (Aljabar Riccati Equation) pada matlab, menghitung gain kontrol K dilakukan dengan mengetik perintah berikut: >>S=ARE(A,B*inv(R)*B',Q);
>>K=inv(R)*B'*S
IV. PENGUJIAN DAN ANALISA
A. Simulasi Kontroler NQR
Simulasi kontrol NQR dilakukan dengan menggunakan matlab simulink sebagaimana Gambar 7
Gambar 4 Simulasi Kontrol NQR
Dengan mengubah-ubah matrik pembobot Q dan R akan mendapatkan variasi gain K, nilai matriks pembobot Q dan R yang menghasilkan respons paling baik adalah
𝑄𝑟𝑜𝑡 = 9000 0 0 0 0 0 0 9000 0 0 0 0 0 0 9000 0 0 0 0 0 0 9000 0 0 0 0 0 0 9000 0 0 0 0 0 0 9000 (22) 𝑄𝑡𝑟𝑎𝑛𝑠 = 9000 0 0 9000 (23) Dengan nilai pembobot matriks R adalah 1untuk gerak rotasi dan translasi.
Berikut adalah hasil simulasi kontroler NQR tanpa gangguan dengan kondisi awal untuk roll, pitch, x, dan y sebesar 0 dan untuk z sebesar 3.
(b)
Gambar 5. Simulasi NQR x,y,z(a) dan roll, pitch(b)
B. Simulasi Kontrol NQR – Respon Terhadap Gangguan Pada simulasi ini, kontroler NQR dengan pemilihan pembobot Q adalah 9000 baik untuk gerak rotasi maupun translasi disimulasikan pada matlab simulink. Dengan nilai gangguan sebesar 0,5 meter untuk z yang diletakkan pada detik ke 10, sedangkan untuk roll, Pitch dan Yaw gangguan bernilai 0,3 radian yang diletakkan pada detik ke 15. Dimana sinyal gangguan dimasukkan ke dalam output dari plant. Respon sistem ditunjukkan pada Gambar 6.
(a)
(b)
(c)
Gambar 6. Simulasi NQR dengan gangguan z(a), roll(c),
pitch(c)
Dari Gambar 6 dapat dilihat bahwa dengan menggunakan kontroler NQR sistem dapat stabil dan mampu menangani gangguan dengan baik, baik yang terjadi pada sudut roll, pitch maupun pada gerak translasi x,y, dan z. selain itu kontroler juga terlihat lebih kokoh, hal ini di karenakan konroler digunakan pada plant nonlinier sehingga seluruh parameter plant tidak di hilangkan.
Quadcopter pada penelitian ini disimulasikan dengan simulasi 3D, hal ini dilakukan agar dapat dilihat pergerakan quadcopter lebih jelas sehingga dengan melihat pergerakan pada simulasi 3D ini tidak ragu lagi untuk mengimpelentasikannya pada plant quadcopter yang sebenarnya, hal ini dimaksudkan juga untuk meminimalisir kerusakan quadcopter akibat dari perencanaan/desain kontrol yang tidak matang. simulasi ditunjukkan pada Gambar 7
Gambar 7. Simulasi 3D Quadcopter
C. Implementasi
Implementasi tidak dapat dilakukan dikarenakan kontroler memiliki orde 6 untuk mengontrol pergerakan rotasi (roll, pitch, yaw) dan orde 2 untuk pergerakan translasi (x,y,z) sehingga mengalami kesulitan untuk membuat algoritma program pada Arduino, selain itu Arduino juga memiliki memory yang kecil untuk menyimpan algoritma pemrograman. Memory penyimpanan yang dimiliki oleh arduino mega adalah sebesar 236 KB, sedangkan program pengolahan sensor IMU dan komunikasi adalah sebesar 36 KB. Cuplikan program pengolahan sensor imu ditunjukkan oleh Gambar 8.
Gambar 8. Cuplikan Program Pengolahan Sensor IMU pada Arduino
V. KESIMPULAN/RINGKASAN
Dari hasil penelitian yang telah dilakukan, maka dapat diperoleh beberapa kesimpulan diantaranya:
1. Pada simulasi pengujian didapatkan nilai parameter dari Q dan R dengan melakukan tuning. Dengan hasil tuning adalah memperoleh nilai Q sebesar 9000, dan nilai R sebesar 1.
2. Pada simulasi kontrol NQR mampu mengatasi gangguan yang diberikan baik gangguan pada gerak translasi z, serta sudut roll maupun pada sudut pitch. 3. Simulasi dari quadcopter yang dijalankan pada Matlab
dapat ditampilkan dalam bentuk 3D agar mempermudah dalam mempresentasikan pergerakan quadcopter.
DAFTARPUSTAKA
[1]. Tommaso Bresciani, “Modelling, Identification and Control of a Quadcopter Helicopter”. Department of Automatic Control Lund University, October 2008. [2]. Luukkonen, Teppo, “Modelling and control of
quadcopter”, Aalto University, Espoo, 2011.
[3]. Jorge Miguel Brito Domingues, “Quadcopter prototype “, Grau de Mestre em Engenharia Mecânica, October 2009.
[4]. Marcelo De Lellis Costa de Oliveira, “Modeling, Identication and Control of a Quadcopter Aircraft”, Czech Technical University in Prague, 2011.
[5]. Dr J. F. Whidborne, “Modelling And Linear Control Of A Quadcopter” Cranfield University, 2007.
[6]. Randal W. Beard , ”Quadcopter Dynamics and Control”, Brigham Young University, October 3, 2008. [7]. Darmawan, Aria “Perancangan Embedded Kontroler
LQR Adaptive Menggunakan Mikrokontroler Untuk Pengaturan Kecepatan Motor DC”, Tugas Akhir, ITS Surabaya, 2011.
[8]. Gamayanti, Nurlita, ”Karakteristim Sistem Ordo Pertama” Teknik Sistem Pengaturan, Jurusan Teknik Elektro FTI-ITS, Surabaya, 2010.
[9]. Naidu, Desineni Subbaram, “Optimal Control System”, CRC Press LLC, USA, 2003.
[10]. Colton, Shane “The Balance Filter: Aa Simple Solution for Integrating Accelerometer and Gyroscope Measurements for a Bolancing Platfrom”, MIT