Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
1
RANCANG BANGUN AUTOMATIC POWER FACTOR CORRECTION BERBASIS
MIKROKONTROLER AVR MENGGUNAKAN METODE JARINGAN SYARAF
TIRUAN
Prihantara S W – 2204 100 112
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya – 60111
Abstrak - Lampu TL, Air Conditioner(AC), motor
listrik, dan lain-lain merupakan peralatan listrik yang banyak digunakan untuk kalangan industri maupun rumah tangga. Dimana semua peralatan listrik tersebut merupakan beban yang bersifat induktif. Akibat dari pemakaian beban induktif, menyebabkan turunnya nilai faktor daya, sehingga dapat membuat kapasitas daya listrik yang terpasang pada pelanggan tidak dapat digunakan secara optimal.
Untuk mengatasi hal tersebut, pada tugas akhir ini, telah dibuat suatu alat untuk mengoreksi nilai faktor daya secara otomatis sebagai akibat adanya perubahan beban induktif. Untuk memperbaiki nilai faktor daya, digunakanlah kapasitor yang dipasang secara paralel terhadap beban. Dengan menggunakan metode jaringan syaraf tiruan yang diimplementasikan pada mikrokontroler AVR, maka dapat diperoleh berapa besar kapasitor yang harus dipasang paralel terhadap beban sesuai dengan perubahan beban induktifnya sehingga terjadi perbaikan nilai faktor daya.
Hasil pengujian menunjukan bahwa terjadi kenaikan nilai faktor daya akibat beban induktif dari 0.22-0.35 menjadi 0.8-1 setelah dipasang kapasitor.
Kata kunci: beban induktif, kapasitor, faktor daya, jaringan syaraf tiruan.
I. PENDAHULUAN
Pemakaian beban induktif oleh pelanggan listrik untuk kebutuhan industri maupun rumah tangga memang tak bisa terhindarkan, karena banyak peralatan listrik semisal AC, lampu TL, pompa air dan lain-lain merupakan beban induktif. Akibat dari pemakaian beban induktif ini akan membuat turunnya nilai faktor daya, sehingga dapat membuat kapasitas daya listrik yang terpasang pada pelanggan tidak dapat digunakan secara optimal. Banyak pelanggan listrik melakukan penambahan daya jika kapasitas daya yang terpasang dirasa kurang mencukupi kebutuhan. Padahal jika kapasitas daya yang terpasang dapat dimanfaatkan dengan optimal, untuk sementara waktu opsi penambahan daya dapat ditunda terlebih dahulu. Karena penambahan daya memerlukan tambahan biaya, belum lagi tarif
listrik yang berubah akibat penambahan daya. Banyak cara yang digunakan untuk memperbaiki faktor daya, salah satunya adalah dengan menggunakan kapasitor. Di kalangan industri, perbaikan faktor daya dengan menggunakan kapasitor ini telah banyak digunakan. Akan tetapi jarang digunakan pada kalangan rumah tangga. Pada umumnya, perbaikan faktor daya dilakukan dengan pemasangan kapasitor dengan nilai yang konstan menggunakan timer maupun dengan
kontaktor. Cara ini memiliki beberapa kelemahan diantaranya adalah masalah mekanik yang diakibatkan oleh kontaktor, kondisi over compensation atau under compensation pada
jaringan listrik akibat switching kapasitor yang
tidak tepat, dan lain-lain[1]. Untuk mengatasi masalah tersebut, pada tugas akhir ini, dibuatlah sebuah alat yang dapat memperbaiki faktor daya secara otomatis sesuai dengan beban induktif yang berubah-ubah menggunakan metode jaringan syaraf tiruan untuk menentukan besarnya beban kompensasi(kapasitor) yang harus dipasang paralel terhadap terjadinya perubahan beban induktif.
II. TEORI PENUNJANG
Pada listrik arus bolak-balik (AC) dikenal ada 3 jenis daya yaitu:
2.1 Daya Aktif
Daya ini sebenarnya adalah daya yang dipakai oleh komponen pasif resistor yang merupakan daya yang terpakai atau terserap. Kalau kita perhatikan supply dari PLN ke rumah-rumah maka daya yang tercatat pada alat kWH meter adalah daya aktif atau juga bisa dikatakan dengan daya rata-rata, yaitu daya yang akan dibayarkan oleh pelanggan. Secara matematis rumus dari daya aktif adalah sebagai berikut:
P=VIcosΦ (2.1)
V
danI
adalah nilai efektif(rms)dari tegangan dan arus dimana nilai dari tegangan dan arus efektifnya adalah: 2 m V V = dan 2 m I I = (2.2) mV
danI
m adalah nilai maksimun dari tegangan dan arus. Satuan dari daya aktif adalah Watt.Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
2
2.2 Daya Reaktif(Q)
Daya ini adalah daya yang muncul diakibatkan oleh komponen pasif diluar resistor. Daya ini diperlukan untuk menimbulkan medan magnet pada suatu trafo, motor listrik, las listrik dan lain-lain.
Secara matematis daya reaktif dapat dirumuskan sebagai berikut:
Q=VIsinΦ (2.3) Satuan dari daya reaktif adalah Volt Ampere Reactive(VAR).
2.3 Daya Kompleks(S)
Daya kompleks merupakan resultan dari daya aktif dan daya reaktif. Daya ini yang sebenarnya disupply oleh PLN. Persamaan bilangan kompleks daya adalah:
S VaIa[VA]
∗
= (2.4)
dimana S=bilangan kompleks daya, Va dan Ia
merupakan besaran fasor tegangan dan arus. Ia*
merupakan konjugasi kompleks dari Ia. Jika Va
dan Ia dinyatakan sebagai
1
Φ ∠ =V
Va dan Ia=I∠Φ2 maka persamaan
S
menjadi:S=VIcos(Φ1−Φ2)+jVIsin(Φ1−Φ2) (2.5) 2
1−Φ
Φ adalah sudut yang menyatakan besarnya sudut tegangan yang mendahului arus. Daya kompleks
S
dapat disebut juga dengan daya tampak(apparent power) Bilangan nyata daribilangan kompleks
S
disebut dengan daya aktif(P) . Sedang bagian imajiner dari bilangan kompleksS
disebut daya reaktif(Q). Sebagaimana daya aktif terdapat pada tahanan, daya reaktif terdapat pada sebuah reaktansi. Daya reaktif positif akan terdapat pada induktor dengan arus tertinggal terhadap tegangan. Dengan dasar itu pula, daya reaktif negatif terdapat pada sebuah kapasitor[2].2.4 Faktor Daya
Rasio dari daya aktif dan daya kompleks disebut dengan faktor daya dan dinyatakan dalam Cos
Φ
atau sering disebut dengan power factor(pf). Secara matematis dirumuskan:Φ = Φ = = cos cos VI VI S P pf (2.6)
Φ
dinamakan sudut faktor daya, sudut ini memiliki rentang antara -90° sampai +90°. Tetapi karena faktor daya adalahcos
Φ
, maka nilainyaselalu positif dengan nilai ≤1. Walaupun demikian faktor daya ini ini bisa lagging atau leading. Faktor
daya disebut lagging jika fasor arus berada di
belakang fasor tegangan atau arus lagging
terhadap tegangan. Beban-beban industri dan
juga perumahan pada umumnya mempunyai faktor daya lagging. Sebaliknya, faktor daya
disebut leading jika fasor arus mendahului
fasor tegangan atau arus leading terhadap
tegangan. Untuk lebih jelasnya bisa dilihat pada gambar 2.1.
θ
θ
Gambar 2. 1Fasor I untuk kondisi lagging dan
leading terhadap fasor V
2.5 Perbaikan Faktor Daya
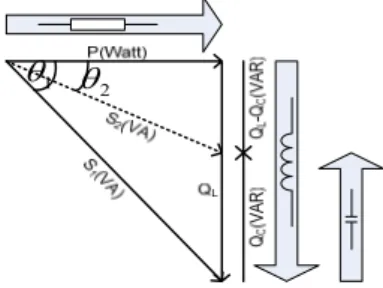
Peralatan listrik yang banyak digunakan dalam industri ataupun dalam rumah tangga biasanya mengandung komponen resistif dan komponen induktif. Jika suatu tegangan dipasang pada suatu beban induktif maka pada beban tersebut selain akan menyerap daya aktif(P) dalam Watt, juga menyerap daya reaktif(Q) dalam Volt Ampere Reaktif(VAR), dimana daya kompleks(S) merupakan penjumlahan vektor antara komponen P dan komponen Q. Sudut yang dibentuk antara P dan S adalah sudut faktor daya.
Pada kenyataanya, besarnya daya reaktif yang ditimbulkan karena pemakaian beban induktif yang berlebihan akan mempengaruhi parameter-parameter kerja dari sistem tenaga listrik. Hal inilah yang perlu ditanggulangi dengan cara pengkompensasian.
1
θ
2
θ
Gambar 2. 2 Segitiga daya sebelum dan sesudah
pemasangan kapasitor kompensasi
Besarnya faktor daya akibat pemakaian daya pada beban tersebut dapat diatur sesuai dengan harga yang diinginkan(mendekati 1) dengan memasang kapasitor kompensasi yang dipasang paralel terhadap beban. Akibat dari pemasangan kapasitor kompensasi tersebut maka besarnya sudut fasa antara komponen P dan S akan mengalami pengurangan dari harga semula(θ2<θ1 atau Cos
θ2>Cos θ1). Untuk lebih jelasnya dapat dilihat pada
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
3
2.6 Neural Network
Neural Network atau Jaringan Saraf
Tiruan(JST) pertama kali didesain oleh Warren Culloch dan Walter Pitts (1943)[9]. Mc-Culloch-Pitts menemukan bahwa dengan mengkombinasikan banyak neuron sederhana sehingga menjadi sebuah sistem saraf merupakan sumber peningkatan tenaga komputasional. Bobot pada neuron Mc-Culloch-Pitts diset sedemikian sehingga neuron tersebut melakukan sebuah fungsi logika sederhana yang khusus. Neuron-neuron yang berbeda melakukan fungsi-fungsi yang berbeda pula. Neuron-neuron disusun menjadi sebuah jaringan untuk menghasilkan sembarang output yang bisa digambarkan sebagai sebuah kombinasi fungsi-fungsi logika. Aliran informasi melalui jaringan mengasumsikan satu langkah waktu unit sebuah sinyal berjalan dari satu neuron ke neuron berikutnya.
Jaringan Saraf Tiruan adalah sistem pemroses informasi yang memiliki karakteristik mirip dengan jaringan saraf biologi. Jaringan saraf Tiruan dibentuk sebagai generalisasi model matematika dari jaringan saraf biologi dengan asumsi bahwa:
1. Pemrosesan informasi terjadi pada banyak elemen sederhana (neuron).
2. Sinyal dikirim diantara neuron-neuron melalui penghubung-penghubung.
3. Penghubung antar neuron memiliki bobot yang akan memperkuat atau memperlemah sinyal. 4. Untuk menentukan output setiap neuron
menggunakan fungsi aktivasi (biasanya bukan fungsi linier) yang dikenakan pada jumlahan input yang diterima. Besarnya output ini selanjutnya dibandingkan dengan suatu batas ambang.
Jaringan saraf tiruan ditentukan oleh 3 hal yaitu: 1. Pola hubungan antar neuron (disebut
arsitektur jaringan)
2. Metode yang menentukan bobot penghubung (disebut metode
training/learning/algoritma).
3. Fungsi Aktivasi
III. PERANCANGAN ALAT
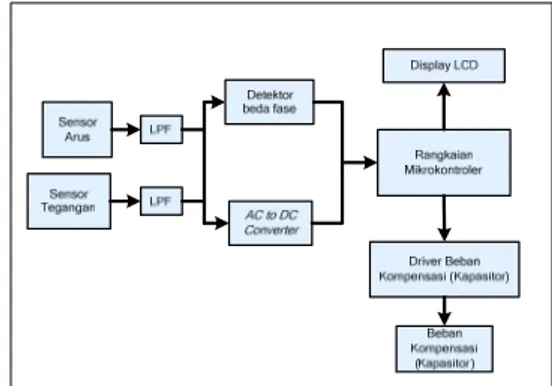
Pada perancangan sistem secara keseluruhan dapat disampaikan pada gambar 3.1. Inputan berupa arus dan tegangan dideteksi oleh sensor arus dan tegangan. Selanjutnya secara berurutan, data berupa arus dan tegangan akan masuk ke rangkaian low pass filter, detektor beda fasa dan
rangkaian AC to DC Converter kemudian masuk ke
rangkaian mikrokontroler. Pada rangkaian mikrokontroler, output dari rangkaian beda fasa diolah menjadi nilai faktor dayanya. Sedangkan output dari AC to DC Converter, dilakukan proses
perubahan data analog menjadi digital yang kemudian akan ditampilkan lewat display LCD.
Selain itu, data-data tersebut juga digunakan sebagai inputan pada metode jaringan syaraf tiruan.
Setelah proses pengolahan data dengan jaringan syaraf tiruan selesai, akan didapatkan suatu nilai output. Nilai output ini digunakan untuk mengontrol berapa besar nilai kapasitor kompensasi sebagai akibat terjadinya perubahan faktor daya agar didapatkan nilai faktor daya sesuai dengan yang diinginkan(mendekati atau sama dengan 1).
Gambar 3. 1 Diagram blok sistem
3.1 Perancangan Perangkat Keras
Perancangan perangkat keras pada sistem ini terdiri dari beberapa rangkaian utama. Diantaranya rangkaian sensor, low pass filter, rangkaian
detektor beda fasa, AC to DC Converter, rangkaian
mikrokontroler, dan rangkaian driver beban
kompensasi(kapasitor).
3.1.1 Rangkaian Sensor
Rangkaian sensor initerdiri dari sensor arus dan tegangan, dimana masing-masing menggunakan trafo arus dan tegangan. Rangkaian ini berfungsi untuk mendeteksi sinyal arus dan tegangan. Gambar rangkaiannya ada pada gambar 3.2 dan 3.3.
Gambar 3. 2 Trafo arus
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
4
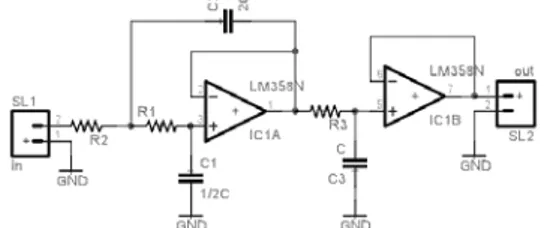
3.1.2 Rangkaian Low Pass Filter
Rangkaian ini berfungsi untuk memfilter sinyal AC dari jala-jala listrik dengan frekuensi
cutoff sebesar 50 Hz. Gambar rangkaiannya ada
pada gambar 3.4
Gambar 3. 4 Low Pass Filter
3.1.3 Detektor beda fasa
Terdiri dari rangkaian zero crossing detector
dan XOR. Rangkaian ini berfungsi untuk mengetahui berapa besar pergeseran fasa antara sinyal arus dan tegangan yang selanjutnya oleh rangkaian mikrokontroler dapat direpresentasikan sebagai nilai faktor daya. Gambar rangkaiannya ada pada gambar 3.5.
Gambar 3. 2 Rangkaian detektor beda fasa
3.1.4 Rangkaian AC to DC Converter
Rangkaian ini berfungsi untuk merubah sinyal AC dari sensor arus dan tegangan menjadi sinyal DC supaya dapat dibaca oleh ADC mikrokontroler. Gambar rangkaiannya ada pada gambar 3.6
Gambar 3. 6 AC to DC Converter
3.1.5 Rangkaian mikrokontroler
Rangkaian mikrokontroler berupa sistem minimum mikrokontroler AVR ATMega32 dengan nilai Xtal yang dipergunakan adalah
sebesar 8 MHz. Pada Rangkaian ini, data-data berupa arus, tegangan, dan beda fasa dihitung dan
nantinya akan ditampilkan pada LCD. Gambar 3.7 adalah gambar rangkaian sistem minimum yang digunakan.
Gambar 3. 7 Rangkaian Sistem minimum
mikrokontroler AVR
3.1.6 Rangkaian Driver beban kompensasi
Rangkaian driver kapasitor kompensasi ini
menggunakan relay sebagai saklarnya dan rangkaian driver relaynya menggunakan IC ULN 2803. IC ULN 2803 tersusun atas 8 pin NPN
Darlington transistor arrays dan bersifat open collector . Gambar 3.8 adalah gambar rangkainnya.
Gambar 3. 8 Rangkaian driver beban kompensasi
IC ULN ini akan aktif jika pin pada mikro diberi logika 1(active high), sehingga akan memicu
relay untuk aktif. Dengan aktifnya relay ini akan membuat kapasitor kompensasi terhubung paralel dengan jala-jala listrik untuk memperbaiki faktor daya akibat adanya perubahan beban induktif.
3.2 Perancangan Perangkat Lunak
Pada perancangan perangkat lunak (software)
dibagi menjadi dua, yaitu software pada komputer
dan pada mikrokontroler ATMega32.
3.1.7 Perancangan Software pada komputer
Pada tugas akhir ini digunakan neural network kategori supervised atau terlatih dengan
metode momentum backpropagation. Prinsip dari
metode backpropagation ini adalah meliputi 3 fase
yaitu fase maju (feedfoward), fase mundur (backpropagation) dan modifikasi (update) bobot.
Kondisi batas perhentian yang biasa dipakai adalah jumlah iterasi atau limit jumlah kesalahan. Perancangan software ini bertujuan untuk
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
5
mendapatkan bobot yang akan digunakan pada proses pengujian. Dengan bobot yang telah didapatkan tersebut maka akan dilakukan proses pengujian akan dilakukan pada mikrokontroler.
Gambar 3.9 merupakan gambar konfigurasi jumlah neuron yang digunakan pada sistem jaringan syaraf tiruan yaitu 2-16-6. 2 buah neuron input, 16 neuron tersembunyi, dan 6 neuron output. Penentuan jumlah neuron pada input layer ini disesuaikan dengan jumlah inputan. Sedangkan untuk output layer disesuaikan dengan jumlah kemungkinan kondisi output, yaitu sesuai dengan target. Untuk penentuan jumlah neuron pada layer tersembunyi tidak ada ketentuan berapa jumlah neuron yang dibutuhkan untuk suatu jaringan syaraf tiruan.
Selain neuron input, tersembunyi dan output layer, pada jaringan ini juga digunakan bias. Terdapat satu buah bias pada input dan juga tersembunyi layer. Dimana nilai input bias yang digunakan adalah 1. Sedangkan untuk fungsi aktivasi yang digunakan adalah sigmoid biner. Dengan fungsi aktivasi tersebut maka hasil perhitungan akan mempunyai range nilai antara 0 sampai 1. Rumus dari fungsi aktivasi sigmoid biner yang digunakan adalah sebagai berikut:
( )
x e x f y − + = = 1 1 (3.4)Gambar 3. 9 Konfigurasi jaringan yang digunakan
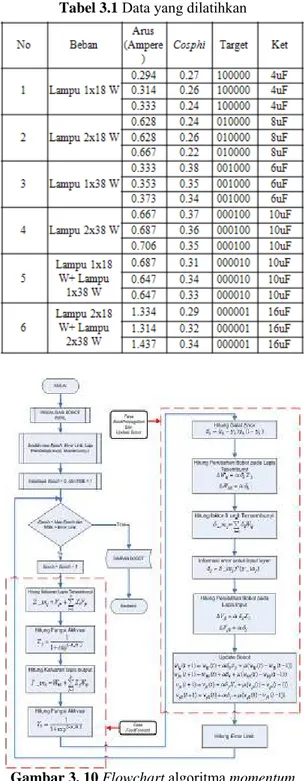
Data yang akan dilatihkan dan alur pemrograman untuk metode momentum backpropagation yang digunakan adalah seperti
pada tabel 3.1 dan gambar 3.10 berikut.
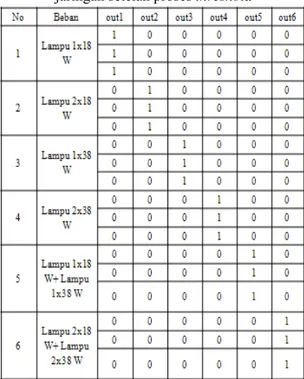
Tabel 3.1 Data yang dilatihkan
Gambar 3. 10 Flowchart algoritma momentum
backpropagation
3.1.8 Perancangan Software pada mikrokontroler
Perancangan Software pada mikrokontroler
meliputi pambacaan ADC, perhitungan faktor daya, dan fase feedforward backpropagation.
Perancangan software jaringan syaraf tiruan yang ditanamkan pada mikrokontroler adalah untuk tahap pengujian. Sehingga yang ditanamkan hanyalah fase feedforward. Pada tahap pengujian
ini akan di uji bobot yang telah didapatkan dari proses pembelajaran. Dimana proses pembelajaran
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
6
telah dilakukan pada komputer. Untuk lebih jelasnya dapat dilihat pada gambar 3.11 berikut ini.
∑ = + = n i ij i j j V XV in Z 1 0 _ ) _ ( exp 1 1 j in z j Z = + − ∑ = + = p j jk j k k W ZW in Y 1 0 _ ) _ ( exp 1 1 k in y k Y= + − ⎩ ⎨ ⎧ < ≥ = = threshold x threshold x x f y , 0 , 1 ) (
Gambar 3. 11 Flowchart perancangan software
pada mikrokontroler
IV. PENGUJIAN ALAT
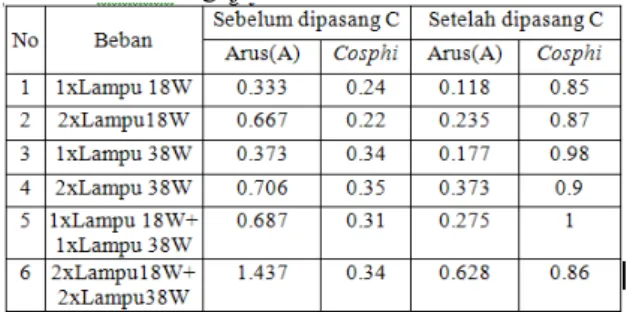
Pada proses pengujian, digunakan beban induktif berupa lampu TL dengan daya yang berbeda-beda. Pengujian ini dilakukan untuk mengetahui kinerja dari sistem secara keseluruhan. Dan setelah dilakukan pengujian ternyata sistem bekerja dengan baik dalam melakukan perbaikan faktor daya akibat perubahan beban induktif. Hasil dari proses pelatihan data dapat dilihat pada tabel 4.1 dan gambar 4.1 berikut ini
Tabel 4.1 Pengujian data
Gambar 4.1 Grafik nilai MSE terhadap jumlah
epoch
Dari grafik pada gambar 4.1, didapatkan nilai MSE pada epoch ke 10x104.
Karena dari hasil pelatihan data didapatkan nilai output yang tidak sesuai dengan target, maka diperlukan proses threshold sebesar 0.8 agar output
jaringan akan sesuai dengan target yang diinginkan. Untuk lebih jelasnya dapat dilihat pada tabel 4.2 berikut ini.
Tabel 4.2 Nilai masing-masing output pada
jaringan setelah proses threshold
Dari tabel 4.2 dapat dilihat bahwa untuk masing-masing output pada jaringan telah sesuai dengan target pada tabel 3.1.
Proses berikutnya adalah pengujian sistem secara keseluruhan, dimana hasilnya terlihat pada tabel 4.3 berilkut ini.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
7
Tabel 4.3 Pengujian sistem secara keseluruhan
Dari hasil pengujian, ternyata terjadi kenaika nilai faktor daya yang semula 0.22-0.35 menjadi 0.85-1.
V. PENUTUP
5.1 Kesimpulan
Dari serangkaian pengujian dan pengukuran yang telah dilakukan pada seluruh sistem yang dirancang dalam tugas akhir ini maka dapat diambil beberapa kesimpulan sebagai berikut.
1. Sensor arus dan tegangan dapat digunakan untuk mendeteksi pergeseran fase antara arus dan tegangan sebagai nilai faktor daya.
2. Algoritma momentum backpropagation dapat
digunakan untuk pengenalan pola untuk mengetahui berapa besar kapasitor yang dipasang parallel terhadap beban.
3. Hasil proses pengujian algoritma momentum backpropagation yang dilakukan pada
mikrokontroler ATMega32 memberikan hasil yang sesuai dengan target yang diharapkan. 4. Perbaikan faktor daya yang terjadi setelah
pemasangan kapasitor dari 0.22-0.35 menjadi0.85-1.
DAFTAR PUSTAKA
[1] Bayindir R, S Sagiroglu, I Colak. 2008.
Power Factor Correction Technique based on artificial neural networks. Journal of Science
Direct, 47(2006) 3204-3215.
[2] Zuhal. Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: PT Gramedia
Utama. 1995
[3] Siemens. Electrical Installation Handbook,
Vol. 1&2.
[4] Terrell, David L. OP AMPS Design, Application, and Troubleshooting, Second Edition. UK: Elsevier's Science &
Technology Rights Department in Oxford. 1996.
[5] Jim Karki. Understanding Operational Amplifier Spesifications. Texas Instrument:
USA. 1998.
[6] Franco, Sergio. Design With Operational Amplifiers and Analog Integrated Circuits, Third Edition. Mc Graw Hill: New York.
2002
[7] ……. Datasheet ATMega 32. 2003.
URL:http://www.atmel.com/
[8] Barnell, Richard, Larry O’Cull and Sarah Cox, Embedded C Programming and the Atmel AVR, Delmar Learning, New York.
[9] Suyanto. Artificial Intellegent : Searching, Reasoning, Planning, dan Learning.
Bandung: Informatika. 2007.
[10] Jong Jek Siang. Jaringan Syaraf Tiruan dan Pemrogramannya menggunakan Matlab.