23
BAB III
Pembuatan Perangkat Keras dan Perangkat Lunak
3.1 Pendahuluan
Sebagaimana telah dijelaskan sebelumnya pada subbab 1.4, penelitian ini meliputi pembuatan perangkat keras dan perangkar lunak. Perangkat keras terdiri atas rangkaian pengkondisi sinyal, relay, mikrokontroler, dan catu daya. Perangkat lunak dibuat agar
dapat mendukung sistem filter anti-gempa dengan proses perhitungan deret Fourier dan
mengatur proses switching pada relay.
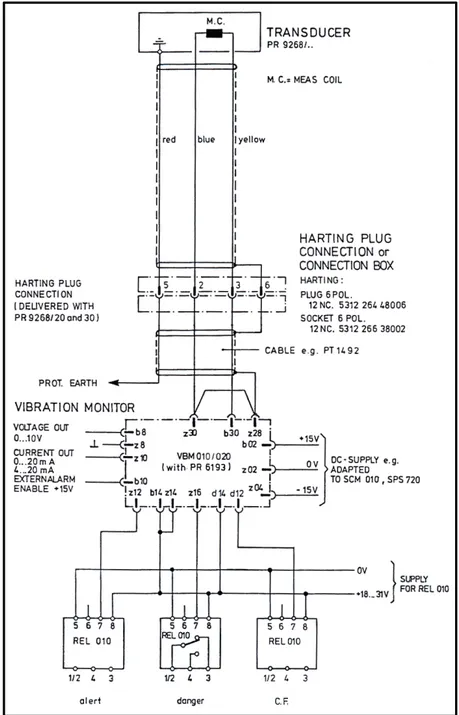
Persyaratan utama perancangan sistem filter anti-gempa adalah sistem yang akan dibuat tidak boleh mengganggu sistem yang telah ada disekitarnya. Filter ini akan dipasangkan setelah sensor kecepatan PR 9268 dan diparalelkan dengan alat pemantau getaran VBM 010 (Vibration Monitoring). Skema sistem pemantau getaran yang sudah ada
dapat dilihat pada Gambar 3.1.
3.2 Perangkat Keras
Sebelum dilakukan proses perancangan perangkat keras, terlebih dahulu perlu dipikirkan mengenai konsep design dari perangkat yang akan dibuat. Perangkat filter anti-gempa yang dikembangkan pada tugas sarjana ini dirancang memiliki 12 kanal masukan dan keluaran. Dengan pertimbangan kompleksitas jalur, ukuran, dan kerapatan antar komponen, maka perangkat filter anti-gempa akan dibagi menjadi 3 buah PCB utama yang masing-masing memuat 4 kanal masukan dan keluaran. PCB catu daya akan dibuat terpisah dari PCB utama karena harus terhubung dekat dengan transformator. Selain itu, dikarenakan dipasaran hanya tersedia komponen resistor dengan tingkat toleransi paling kecil sebesar 1%, maka pada beberapa rangkaian pada perangkat keras digunakan trimpot untuk memperoleh nilai hambatan yang tepat.
Pada Gambar 3.2 diperlihatkan skema perangkat keras dari filter anti-gempa. Dari skema tersebut dapat dilihat bahwa sinyal masukan filter akan dibagi menjadi tiga cabang. Cabang pertama sinyal masukan dihubungkan dengan mikrokontroler untuk dilakukan proses perhitungan deret Fourier. Pada cabang kedua, sinyal masukan dihubungkan
dengan rangkaian pengkondisi sinyal yang berfungsi untuk membatasi amplitudo sinyal masukan. Rangkaian pengkondisi sinyal itu sendiri tersusun atas rangkaian differential input, rangkaian penguat, rangkaian pembatas tegangan, dan rangkaian pembagi tegangan.
24 Keluaran dari rangkaian pengkondisi sinyal tersebut selanjutnya dihubungkan dengan
relay. Pada cabang ketiga, sinyal masukan dihubungkan langsung dengan relay (di-bypass
-kan).
Gambar 3.1 Skema sistem pemantau getaran di PLTP Gunung Salak
Selain melakukan perhitungan deret Fourier, tugas mikrokontroler adalah untuk
mengatur pengaktifan relay, sehingga sinyal keluaran filter dapat berupa sinyal masukan
yang sebenarnya atau sinyal masukan yang melalui pengkondisi sinyal. Selain menggunakan relay, sinyal masukan juga dapat di-bypass-kan menggunakan sebuah
tomb beser bol secara m rta fotonya manual. Sk dapat diliha Sinyal masukan Ga Gam kema rangk at masing-m R pe Mik A ambar 3.2 D mbar 3.3 Per kaian keselu masing pada Rangkaian engkondisi sinyal krokontroler ATmega32 By-Pass Diagram alir rangkat kera uruhan pera a Gambar 3. Relay trip? ya tidak r perangkat as filter anti angkat kera 3 dan Gamb Siny keluar keras i-gempa as filter ant bar 3.4. yal ran 25 ti-gempa
26 Gambar 3.4 Foto perangkat keras filter anti-gempa
3.2.1 Rangkaian Pengkondisi Sinyal
Rangkaian pengkondisi sinyal dirancang agar memiliki kemampuan untuk memotong sinyal masukan pada kondisi trip turbin-generator unit 3, yaitu pada tegangan
380 mV. Selain itu, sinyal keluaran rangkaian ini harus memiliki faktor pembesaran total sebesar satu kali (unity gain). Rangkaian ini tersusun atas 4 rangkaian utama, yaitu
rangkaian proteksi tegangan, differential input dan penguat, pembatas tegangan dan
pembagi tegangan.
3.2.1.1 Rangkaian Proteksi Tegangan Opamp
Rangakaian proteksi tegangan diperlukan agar tegangan masukan sesuai dengan tegangan yang diijinkan oleh sistem yang ingin dibuat agar terlindungi dari kerusakan. Dalam rangkaian pengkondisi sinyal digunakan komponen aktif berupa opamp yang
kinerjanya sangat penting bagi fungsi keseluruhan rangkaian tersebut, oleh sebab itu komponen ini harus dilindungi dari kerusakan. Apabila tegangan masukan opamp melebihi
tegangan catu dayanya, maka komponen tersebut dapat mengalami kerusakan. Toleransi yang diijinkan oleh opamp untuk dapat beroperasi secara normal adalah sekitar 0,3 Volt
27 Komponen opamp merupakan IC yang terdiri dari beberapa transistor. Tegangan
masukan opamp dihubungkan dengan base dari transistor untuk mengatur besarnya beda
tegangan yang terjadi antara collector dengan emitter. Beda tegangan tersebut dibatasi oleh
tegangan catu daya opamp, sehingga tegangan masukan opamp tidak boleh melebihi
tegangan catu daya opamp agar dapat beroperasi secara normal.
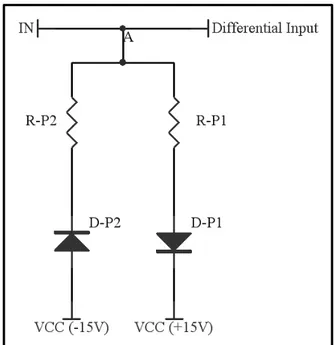
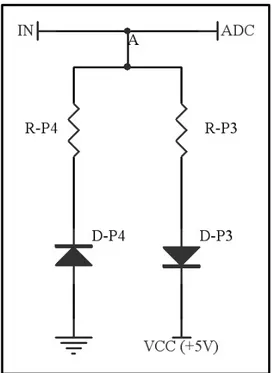
Skema rangkaian proteksi tegangan opamp dapat dilihat pada Gambar 3.5. Perangkat keras yang digunakan adalah dua buah dioda 1N4148 dan dua buah resistor 10 kΩ. Dioda berfungsi sebagai katup satu arah, dimana apabila tegangan masukan lebih kecil daripada -15 Volt, maka arus akan mengalir dari VCC(-15V) menuju titik A sehingga tegangan di titik A akan sama dengan -15 Volt. Apabila tegangan masukan lebih besar dari tegangan +15 Volt, maka arus akan mengalir dari titik A menuju VCC (+15V), sehingga tegangan di titik A akan sama dengan +15V. Hal ini menyebabkan tegangan di titik A tidak akan kurang dari -15 Volt dan tidak akan lebih dari +15 Volt. Resistor R-P3 dan R-P4 berfungsi menjaga agar arus yang melewati dioda tidak terlalu besar karena akan dapat merusak komponen tersebut.
Gambar 3.5 Rangkaian proteksi tegangan opamp
3.2.1.2 Rangkaian Differential Input dan Penguat
Rangkaian differential input berfungsi untuk mengurangi efek noise yang masuk ke
28
(operational amplifier). Untuk menunjang kinerja perangkat filter anti-gempa, pemilihan
komponen opamp pada penelitian ini harus memenuhi persyaratan antara lain memiliki
impedansi masukan dan CMRR yang besar. Dalam penelitian ini digunakan opamp dengan
seri LF347 karena memiliki beberapa keunggulan, yaitu:
• Konsumsi daya yang kecil
• Jangkauan tegangan masukan (sampai dengan tegangan catu daya) dengan kondisi
common mode maupun differential
• Tegangan offset yang rendah, sekitar 3 mV • Perlindungan terhadap hubungan pendek
• Impedansi masukan J-FET yang besar, sekitar 1012Ω • CMRR yang besar, sekitar 70 dB
• Kompak, dalam satu IC terdapat 4 buah opamp yang independen
• Mudah ditemui di pasaran dan harganya relatif murah
Sistem yang akan dibuat harus dapat membatasi amplitudo tegangan masukan agar tidak melebihi batas tegangan yang dapat menyebabkan trip, yaitu 380 mV. Sayangnya
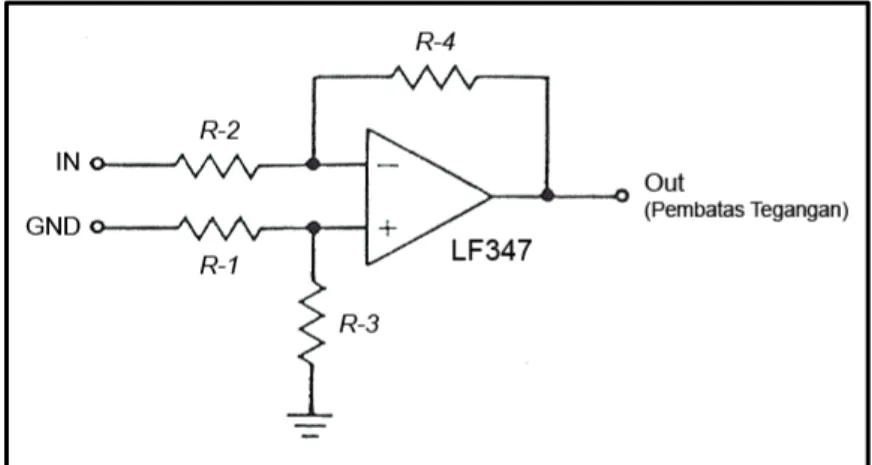
dipasaran tidak ditemui komponen elektronik yang dapat membatasi tegangan sekecil itu. Oleh sebab itu, sinyal masukan filter harus diperbesar terlebih dahulu menggunakan penguat. Rangkaian penguat dirancang dengan faktor penguatan sebesar 27 kali. Rangkaian differential input dan penguat dapat dibuat menggunakan satu buah opamp,
dengan rangkaian seperti terlihat pada Gambar 3.6.
29 Rangkaian differential input memiliki persyaratan dimana R-1 harus sama dengan
R-2 dan R-3 harus sama dengan R-4, sedangkan untuk rangkaian penguat ditentukan oleh nilai hambatan R-2 dan R-4, sesuai dengan Persamaan 3.1.
(
)
Out IN GND
R-4 V = V -V
R-2 (3.1)
Pemilihan R-2 dan R-4 harus terlebih dahulu ditentukan agar R-1 dan R-3 dapat dengan mudah dicari. Untuk mendapatkan faktor penguatan yang diinginkan, maka perbandingan antara R-4 harus sama dengan 27 kali R-2. R-2 dipilih sebesar 10 kΩ, sehingga R-4 harus sama dengan 270 kΩ. Dengan begitu nilai R-1 sama dengan 10 kΩ dan R-3 sama dengan 270 kΩ.
3.2.1.3 Rangkaian Pembatas Tegangan
Dalam penelitian ini diperlukan suatu rangkaian yang dapat membatasi amplitudo sinyal masukan agar tidak melebihi batas trip yang diperbolehkan, yaitu 380 mV. Secara
sederhana rangkaian pembatas tegangan dapat dirancang dengan menggunakan diode zener, akan tetapi di pasaran tidak terdapat diode zener dengan tegangan breakdown
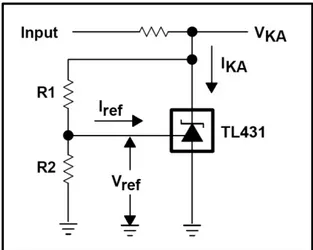
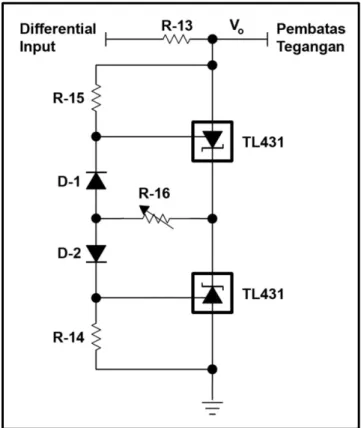
sebesar 380 mV. Berdasarkan alasan tersebut rangkaian pembatas tegangan dirancang dengan menggunakan komponen IC TL431. Fungsi IC ini sama dengan diode zener, hanya saja tegangan breakdown-nya dapat diatur dari nilai tegangan referensinya, Vreff (2,5 volt),
sampai dengan 36 Volt dengan menggunakan rangkaian yang dapat dilihat pada Gambar 3.7.
30 Dikarenakan sinyal masukan filter berupa sinyal AC yang mempunyai tegangan positif maupun negatif, maka diperlukan dua buah TL431 yang akan dirangkai seperti pada Gambar 3.8. Tegangan breakdown (Vo) dapat diatur dengan pemilihan dua buah hambatan
sesuai dengan Persamaan 3.2.
o ref R-16 V = 1+ V R-15 ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ (3.2)
Nilai hambatan R-15 dirancang sama dengan R-14 yaitu 10 kΩ, sedangkan R-13 yang berfungsi untuk membatasi arus yang mengalir ke TL431 bernilai 1 kΩ. Agar Vo sama dengan 380 mV atau 10,26 Volt setelah melewati rangkaian differential input, maka R-16
harus bernilai 31,04 Ω. Untuk pengaturan Vo dari 0,342 (9,234) sampai dengan 0,418 (11,286) Volt, maka R-16 harus dapat diatur nilai hambatanya dari 26,936 sampai dengan 35,144 Ω. Oleh sebab itu, R-16 dirancang menggunakan trimpot dengan nilai pengaturan hambatan dari 0 sampai dengan 50 kΩ.
Gambar 3.8 Rangkaian permbatas tegangan bipolar
3.2.1.4 Rangkaian Pembagi Tegangan
Setelah melewati rangkaian differential input dan penguat mengalami pembesaran
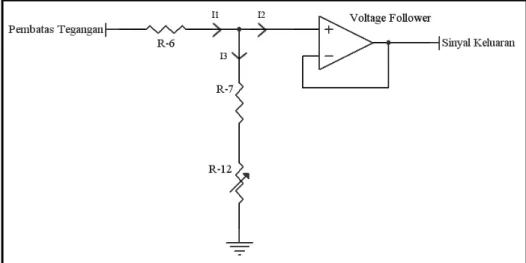
31 pembagi tegangan agar diperoleh sinyal keluaran dengan pembesaran total (dari rangkaian penguat dan rangkaian pembagi tegangan) sebesar satu kali. Skema rangkaian pembagi tegangan dapat dilihat pada Gambar 3.9.
Gambar 3.9 Rangkaian pembagi tegangan
Karena hambatan yang digunakan memiliki nilai toleransi sebesar 1 persen, maka untuk memperoleh harga pembesaran yang tepat digunakan trimpot single-turn (R-12)
yang besar hambatanya dapat diatur. Adapun asumsi diambil bahwa I2 mendekasi nol karena terhubung dengan voltage follower yang memiliki impedansi masukan sangat besar,
sehingga arus yang mengalir menuju komponen tersebut sangat kecil. Dengan demikian, berdasarkan hukum Kirchoff didapat Persamaan (3.3) untuk mendapatkan nilai hambatan
yang dibutuhkan. out in V R-7 + R-12 = V R-6 + R-7 + R-12 ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ (3.3)
Dalam persamaan diatas, untuk memudahkan perancangan, R-6 dipilih sebesar 100 kΩ. Karena perbandingan Vout dengan Vin sama dengan 1/27, maka (R-7 + R-12) harus sama dengan 3,7 kΩ. Faktor pembagi tegangan ini sangat bergantung dari ketelitian dari nilai hambatan yang digunakan. Oleh sebab itu, R-7 dipilih sebesar 1 kΩ sedangkan R-12 dirancang menggunakan trimpot 5 kΩ.
3.2.2 Rangkaian Relay
Relay merupakan komponen switch yang digerakkan secara elektrik dengan prinsip
32 atas SPST (Single Pole Single Throw), SPDT (Single Pole Double Throw), DPST (Double Pole Single Throw), DPDT (Double Pole Double Throw), dan lain-lain. Relay juga
dibedakan atas besar tegangan untuk pengaktifan kumparannya, yaitu 5, 6, 12, dan 24 Volt DC. Untuk memenuhi kebutuhan sistem yang akan dibuat, maka digunakan relay 5V
dengan jenis DPDT.
Kumparan yang terdapat dalam relay memiliki sifat sebagai induktor. Salah satu
sifat induktor adalah apabila terjadi perubahan tegangan secara tiba-tiba, komponen ini akan merespon dengan cara menghasilkan tegangan yang berkebalikan. Dengan begitu, dalam rentang waktu yang singkat, relay akan bertindak sebagai catu daya dan dapat
menghasilkan tegangan yang sangat besar. Berdasar pada alasan tersebut, perlu dibuat suatu rangkaian khusus yang dapat melindungi komponen-komponen dalam sistem, khususnya mikrokontroller, dari kerusakan. Dalam rangkaian pengaman tersebut terdapat tambahan komponen optokopler sebagai penghubung antara mikrokontroler dengan relay
dan diode untuk membatasi arah arus yang terjadi akibat tegangan balik dari relay.
Optokopler atau optoisolator merupakan komponen penghubung antara dua buah
rangkaian. Di dalam komponen ini terdapat sebuah LED dan phototransistor. Setiap kali
LED dialiri arus dan menghasilkan cahaya, phototransistor akan mengaktifkan rangkaian
yang terhubung dengannya. Di pasaran terdapat banyak jenis optokopler, tapi yang paling
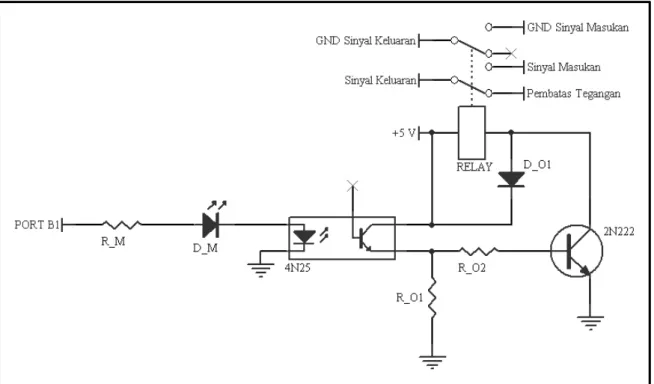
mudah dan murah ditemui adalah 4N25. Pin LED pada 4N25 terhubung dengan PORT B pada mikrokontroler ATmega32 yang dapat menghasilkan tegangan +5 Volt. Berdasarkan petunjuk manual 4N25, arus yang mengalir melalui LED (IF) harus sebesar 10 mA. Oleh sebab itu harus ditambahkan sebuah resistor untuk memenuhi kebutuhan tersebut. Selain LED internal optokopler, juga terdapat LED indikator sebagai tanda relay sedang aktif.
Perlu diketahui bahwa masing-masing LED memiliki voltage drop sebesar 1,2 Volt
sehingga nilai resistor yang dibutuhkan dapat dicari menggunakan Persamaan (3.4). PORTB D_M D_4N25 V - V - V R_M = I (3.4) -3 5 - 1,2 - 1,2 R_M = 10×10 R_M = 260Ω
Dikarenakan di pasaran tidak terdapat resistor 260 Ω, maka akan digantikan dengan nilai yang paling dekat, yaitu 220 Ω. Nilai hambatan ini menghasilkan arus sebesar 11,8 mA yang mana masih aman untuk pengoperasian LED.
33 Rangkaian yang ingin dikendalikan terdiri atas dua buah hambatan, sebuah relay,
dan sebuah transistor NPN (2N222). R_O1 bernilai 10 kΩ dan berfungsi sebagai pull-down
resistor agar kaki base pada transistor 2N222 tidak dalam keadaan floating. R_O2 bernilai
750 Ω dan berfungsi untuk mengatur arus yang mengalir menuju kaki base pada transistor, sehingga secara tidak langsung mengatur besarnya arus yang mengalir melalui relay.
Penempatan diode dimaksudkan untuk melindungi rangkaian dari loncatan tegangan akibat perubahan tegangan secara tiba-tiba pada kumparan relay. Gambar 3.10 memperlihatkan
skema keseluruhan rangkaian relay.
Gambar 3.10 Rangkaian relay
3.2.3 Rangkaian Mikrokontroler
Perusahaan Atmel sudah merancang mikrokontroler ATmega128 agar hanya membutuhkan sesedikit mungkin komponen pendukung sebagai syarat minimal operasinya. Komponen-komponen pendukung tersebut antara lain adalah catu daya +5 Volt, rangkaian clock, dan rangkaian reset. Fungsi-fungsi mikrokontroler yang digunakan
dalam penelitian ini adalah ADC dan port output/input. Kaki-kaki ATmega32 yang digunakan untuk menjalankan ADC adalah kaki AVCC dan AREFF. ADC internal ATmega32 diaktifkan dengan cara memberikan catu daya +5 Volt pada kaki AVCC, sedangkan untuk memberikan tegangan referensi ADC digunakan kaki AREF. Tegangan
34 referensi ADC yang digunakan, sama dengan catu daya mikrokontroler (+5 Volt). Skema rangkaian mikrokontroler secara lebih merinci dapat dilihat pada Gambar 3.11.
Gambar 3.11 Rangkaian mikrokontroler ATmega32
3.2.3.1 Rangkaian Proteksi Tegangan ADC
Proses konversi sinyal analog menjadi sinyal digital dilakukan oleh ADC, dimana tegangan sinyal masukannya tidak boleh melebihi tegangan referensi dari ADC. Oleh sebab itu sebelum masuk ke rangkaian ADC, tegangan sinyal masukan harus dikondisikan terlebih dahulu agar tidak melebihi jangkauan yang diizinkan. Dalam penelitian ini digunakan ADC internal dari mikrokontroler ATmega 32. ADC internal ini hanya dapat menerima tegangan masukan positif 0 sampai dengan +5 volt. Tegangan masukan yang berada di luar jangkauan dapat merusak Rangkaian ADC. Sesuai dengan batas jangkauan tegangan ADC, rangkaian proteksi tegangan dirancang untuk membatasi tegangan agar berada dalam jangkauan 0 sampai dengan +5 Volt. Skema rangkaian proteksi tegangan ADC dapat dilihat pada Gambar 3.12. Prinsip kerjanya mirip dengan rangkaian proteksi tegangan opamp yang telah dijelaskan pada subbab 3.2.1.1, perbedaannya hanya terletak pada batas tegangan yang digunakan GND (0V) dan VCC(+5V).
3.2.3.2 Rangkaian Clock
Osilator internal yang dimiliki mikrokontroler ATmega32 memungkinkan empat pilihan frekuensi clock, yaitu: 1, 2, 4, dan 8 MHz. Apabila mikokontroler diset
35 menggunakan osilator internal ini sebagai frekuensi clock sistem, maka tingkat kepresisian
akan kurang bagus karena variasinya mencapai ± 3% dari frekuensi nominal, tergantung kepada variasi tegangan catu daya dan temperatur. Hal ini tidak diinginkan dalam aplikasi perangkat akuisisi data berbasis mikrokontroler, karena parameter yang memerlukan tingkat kepresisian dan kestabilan tinggi adalah frekuensi cuplik dari ADC. ADC internal mikrokontroler akan mencuplik sinyal masukan dengan menggunakan acuan frekuensi
clock sistem. Untuk mendapatkan tingkat kepresisian yang tinggi dapat digunakan kristal
pembangkit clock eksternal dengan variasi kurang dari 0,1%. Kristal eksternal ini mudah
ditemui di pasaran dengan nilai yang bervariasi. Dalam penelitian ini digunakan kristal dengan frekuensi clock sebesar 16 MHz Pemilihan ini didasarkan pada pertimbangan
bahwa perangkat yang ingin dibuat harus dapat mengolah data dengan cepat dan tepat, sehingga frekuensi clock sistem mikrokontroler yang digunakan harus diset pada kondisi
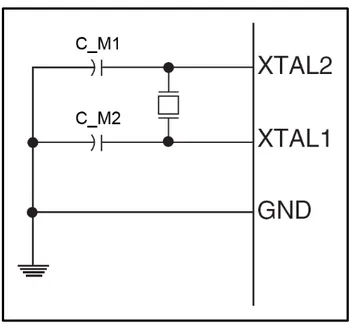
maksimumnya. Frekuensi maksimum kristal eksternal yang dapat dipasangkan pada mikrokontroler ATmega32 adalah 16 MHz. Sesuai dengan petunjuk manual mikrokontroler ATmega32, bila kecepatan kristal yang digunakan adalah 16 MHz, maka nilai kapasitor C_M1 dan C_M2 dipilih sebesar 22 pF. Skema rangkaian clock dapat dilihat
pada Gambar 3.13.
36 Gambar 3.13 Rangkaian clock
3.2.3.3 Rangkaian Reset
Rangkaian reset berfungsi untuk me-reset mikrokontroler, yaitu mengembalikan program counter pada alamat ROM internal 0000h. Pe-reset-an mikrokontroler akan
mengeksekusi program pada alamat yang ditunjuk oleh program counter. Kaki RESET
pada mikrokontroler bersifat aktif low, artinya jika terjadi perubahan level tegangan dari high ke low dan kondisi low serta ditahan kondisinya selama 50 ns, maka mikrokontroler
akan ter-reset. Rangkaian reset diperlihatkan dalam Gambar 3.14.
Gambar 3.14 Rangkaian reset
Rangkaian reset akan me-reset mikrokontroler pada dua kondisi, yaitu saat
perangkat akuisisi data dihidupkan dan saat tombol reset ditekan. Pada saat perangkat
akuisisi data dihidupkan mikrokontroler akan mendapatkan catu daya dan secara otomatis mikrokontroler akan mengeksekusi program di dalamnya mulai dari alamat 0000h. Pada
37 saat tombol reset yang merupakan tombol push button ditekan, GND akan langsung
berhubungan dengan kaki RESET sehingga statusnya kembali low. Mikrokontroler akan
kembali ter-reset. Pada prakteknya, tombol reset ini dipasang pada casing perangkat
akuisisi data. Pemasangan resistor pull-up RM_RST (10 kΩ) adalah untuk menghilangkan
keadaan mengambang (floating condition) pada kaki RESET, sedangkan penggunaan
kapasitor CM_RST (100 nF) adalah untuk menanggulangi bouncing pada tombol reset.
3.2.4 Rangkaian Catu Daya
Sistem filter berbasis mikrokontroler dirancang menggunakan beberapa komponen aktif, sehingga memerlukan catu daya dari luar untuk dapat beroperasi. Komponen tersebut adalah opamp LF347 dan mikrokontroller ATmega32. Agar dapat beroperasi, opamp
memerlukan catu daya dual supply ±15 Volt karena harus dapat mengkondisikan sinyal
masukan yang bersifat bipolar, yaitu mengandung tegangan positif dan negatif. Di lain pihak, mikrokontroller ATmega32 bekerja dengan single supply +5 Volt untuk dapat
mengoperasikan fungsi-fungsi internalnya.
Gambar 3.15 Rangkaian catu daya
Sistem yang akan dibuat memiliki 12 kanal masukan dan terbagi menjadi 3 buah PCB. Untuk satu kanal masukan digunakan satu buah IC opamp dan untuk empat buah
38 kanal masukan digunakan satu buah mikrokontroller. Jadi, untuk 12 kanal masukan digunakan 12 buah opamp dan 3 buah mikrokontroller. Satu buah IC opamp bekerja
memerlukan arus sebesar 2,7 mA, sedangkan satu buah mikrokontroler memerlukan 200 mA. Gambar 3.15 menunjukan skema rangkaian rangkaian catu daya yang dibuat.
Sebagaimana tampak dalam Gambar 3.15, tegangan bolak-balik 220 Vrms dari PLN dihubungkan dengan transformator 3 Amper, yang berfungsi untuk menurunkan tegangan bolak-balik dari 220 Vrms menjadi tegangan bolak-balik sebesar 18 Vrms. Setelah diperkecil oleh transformator, tegangan masukan dikondisikan ke diode bridge (bridge rectifier) 3
Amper yang berfungsi untuk menyearahkan tegangan bolak-balik menjadi tegangan searah (berbentuk half sine). Untuk menghasilkan tegangan yang konstan sebesar +18 dan -18
Volt, tegangan keluaran diode bridge dirangkaikan dengan kapasitor 4700 μF. Kemudian
tegangan ini diturunkan kembali menggunakan voltage regulator sesuai dengan kebutuhan
sistem filter, yaitu +15, -15, dan +5 volt.
Untuk dapat menghasilkan tegangan searah +15 dan -15 Volt digunakan IC LM7815 dan LM7915, sedangkan untuk menghasilkan tegangan searah +5 Volt, digunakan IC LM7805. Tiap-tiap nomor seri IC voltage regulator, LM7XYZ, memiliki arti
yang berhubungan dengan fungsinya. Angka yang terisi pada X menentukan apakah IC regulator meneruskan tegangan positif (8) atau negatif (9), sedangkan angka yang terisi pada YZ menentukan tegangan keluaran dari voltage regulator.
Kapasitor 220 μF berfungsi untuk memberikan tegangan keluaran voltage regulator
yang benar-benar konstan sehingga tidak akan merusak komponen aktif pada sistem. Untuk mengatisipasi terjadinya penurunan tegangan akibat kapasitansi kabel, maka dipasangkan kapasitor sebesar 100 nF sebelum dan sesudah voltage regulator. Gambar
3.16 memperlihatkan foto dari rangkaian catu daya yang telah dibuat.
3.3 Perangkat Lunak
Program untuk sistem operasi ATmega32 dibuat dengan bantuan kompiler CodeVisionAVR yang menggunakan bahasa C sebagai dasar bahasa pemrogramannya. Fitur kompiler ini sangat memudahkan pengguna dalam memrogram fungsi-fungsi mikrokontroler ATMEL. Pengguna tidak perlu mencari alamat register untuk menjalankan fungsi tertentu pada mikrokontroler, karena hal ini akan dilakukan oleh CodeVisionAVR pada saat pengguna melakukan pengaturan secara GUI. Tampilan dari CodeVisionAVR dapat dilihat pada Gambar 3.17.
39 Gambar 3.16 Foto rangkain catu daya
Gambar 3.17 Tampilan CodeWizardAVR
Dalam pembuatan program mikrokontroler ATmega32 untuk sistem operasi filter, perlu dilakukan beberapa pegaturan, diantaranya adalah :
• Chip Initialitation
o Chip : ATmega32 o Clock 16 MHz
40
• ADC Initialitaion
o ADC enabled
o Volt. Ref. : AREF pin o ADC Clock : 250 000 Hz
• Timer/Counter 1 initialization
o Clock source : System Clock o Clock value : 250 000 Hz o Mode : Normal
o Interupt on : Timer 1 Overflow o Value : FB1E h
• Port B Bit 1-7 : Out
Setelah insisialisasi dilakukan, langkah selanjutnya adalah membuat program inti filter. Tahap pemrograman ini diawali dengan pengaturan waktu pengambilan data atau waktu cuplik data yang ingin diambil dan disimpan. Pengaturan ini dilakukan dengan bantuan Timer/Counter1. Untuk keperluan ini, register TCNT1H dan TCNT1L diisi
dengan suatu nilai agar dapat menghasilkan Overflow Interupt dengan frekuensi tertentu.
Subprogram Overflow Interupt berisi perintah untuk untuk mengaktifkan fungsi ADC,
sehingga proses pencuplikan data dapat berlangsung. Hubungan antara frekuensi pencuplikan data (fADC) dengan register TCNT1 (TCNT1H dan TCNT1L) adalah sebagai
berikut, timer ADC f f = 65536-TCNT1 (3.6)
Frekuensi cuplik ADC yang diinginkan adalah sebesar 200 Hz. Agar hal ini tercapai, frekuensi Timer/Counter1 (ftimer) dipilih sebesar 250.000 Hz, sehingga register
TCNT1 harus diisi dengan nilai 64.286.
Dalam perhitungan deret Fourier diperlukan data minimal 5 gelombang sinyal
masukan untuk memperoleh hasil perhitungan yang baik. Oleh sebab itu, untuk mendapatkan minimal 5 gelombang sinyal getaran mesin (50 Hz), maka waktu pengambilan datanya harus lebih dari 0,1 detik. Dengan kecepatan cuplik yang diatur sebesar 200 Hz, jumlah data minimum yang harus disimpan di dalam memori RAM mikrokontroler adalah sebesar 20 data. Pada penelitian ini jumlah data yang akan disimpan di dalam RAM adalah sebesar 100 data per kanal. Dengan begitu untuk 3 kanal masukan,
41 data yang harus disimpan adalah sebesar 300 data dan dengan ukuran satu datanya adalah 2 byte, besarnya kapasitas yang harus disediakan di dalam RAM mikrokontroler adalah sebesar kurang lebih 1,2 kb dari 2 kb yang tersedia.
Setelah semua data yang dibutuhkan terkumpul, tahap berikutnya adalah perhitungan nilai tegangan masukan yang sebenarnya menggunakan Persamaan 3.7.
ADC in ref
V
V = ×V
1024 (3.7)
Setelah sinyal diperoleh, maka langkah berikutnya adalah perhitungan deret
Fourier. Deret ini mengharuskan tiap-tiap data tegangan masukan dikalikan dengan sinus
dan cosinus yang kemudian dijumlahkan dan disimpan dalam variabel temp_a dan temp_b. Sebelum perhitungan amplitudo getaran dilakukan, kedua variabel temp_a dan temp_b masing-masing dikalikan dengan 2/N, dalam hal ini 2/100 atau 1/50, dan disimpan dalam variabel a dan b.
Dikarenakan deret Fourier mengandung komponen real dan imajiner, maka
amplitudo mutlaknya diperoleh dengan menggunakan Persamaan (3.10). Dengan menetapkan harga fo sebesar 50 Hz, maka berdasarkan Persamaan (3.10) akan didapat
karakteristik |Xp| seperti terlihat pada Gambar 3.18.
[
]
[
]
2 N-1 s o s n=0 p 2 N-1 s o s n=0 2 x(nT ) cos(2 f (nT )) N X = 2 + x(nT ) sin(2 f (nT )) Nπ
π
⎧ ⎫ ⎨ ⎬ ⎩ ⎭ ⎧ ⎫ ⎨ ⎬ ⎩ ⎭∑
∑
(3.10) Gambar 3.18 Karakteristik |Xp|42 Persamaan deret Fourier berfungsi untuk memilah antara sinyal getaran mesin
dengan sinyal getaran akibat gempa. Amplitudo sinyal masukan yang berasal dari gempa (4 Hz) akan terhitung sangat kecil, sedangkan amplitudo sinyal masukan yang berasal dari getaran mesin (50 Hz) akan sama dengan amplitudo sinyal masukan.
Dalam perancangan sistem filter, diinginkan agar apabila sinyal masukan yang berasal dari mesin memiliki amplitudo melebihi suatu harga maka mikrokontroler akan mengaktifkan relay melalui port B, sehingga secara tidak langsung akan mem-bypass-kan
sinyal masukan menuju keluaran (tidak melalui rangkaian pembatas tegangan). Besarnya harga tersebut ingin diset sebesar 0,380 Volt, tetapi karena tingkat akurasi ADC internal mikrokontroler ATmega32 sebesar ± 10 mV maka harga tersebut diset sebesar 0,390 Volt.
Program yang akan di-download-kan ke dalam mikrokontroler bukan hanya berisi
perhitungan, tetapi juga berisi program yang dapat menyalakan indikator berupa LED dengan menggunakan port B yang kosong. Hal ini dimaksudkan agar pengguna dapat melihat apakah program yang telah ter-download ke dalam mikrokontroler, khususnya
program perhitungan deret Fourier, berkerja dengan baik atau tidak. LED diatur agar
menyala setiap kali perhitungan ke lima (setelah LED mati) selesai dilakukan, sedangkan indikator tersebut diset agar menyala selama dua kali perhitungan.