TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
AMBROSIUS HANS GIGIH KURNIADI NIM: 035114024
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
AMBROSIUS HANS GIGIH KURNIADI Student Number: 035114024
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
“
TIADA KEBAHAGIAAN TANPA PERJUANGAN
DAN KERJA KERAS
”
Kupersembhkan tugas ahkir ini kepada
kedua orangtua ku (JB. Heru.N dan M.Respita Murti),
kedua adik ku, dan semua keluarga yang telah memberi
doa dan dukungan semangat
Ambrosius Hans Gigih Kurniadi 035114024
INTISARI
Proses sortir adalah kegiatan mengelompokkan benda berdasarkan spesifikasi tertentu. Untuk memberi kemudahan dalam menyortir benda maka dibuat suatu model peralatan yang dapat menyortir panjang benda dengan rentang tertentu secara otomatis. Unit pengendali yang digunakan adalah rangkaian digital.
Mesin sortir ini terdiri dari konveyor, sensor identifikasi, dan mekanik pendorong benda. Mesin sortir ini memiliki empat pemilihan panjang benda yang sudah ditentukan. Benda yang akan disortir diletakkan di atas konveyor yang berjalan melewati sensor identifikasi. Setelah benda melewati sensor identifikasi maka benda tersebut akan dimasukkan ke kotak oleh mekanik pendorong benda sesuai dengan kelompoknya secara otomatis.
Mesin sortir ini sudah dicoba dan terbukti dapat bekerja dengan baik. Hasil benda yang disortir oleh mesin ini telah sesuai dengan kelompoknya, kecuali pada daerah perbatasan tingkat keberhasilannya 71,65 %.
Kata kunci: Mesin sortir, implementasi rangkaian digital, konveyor.
Ambrosius Hans Gigih Kurniadi 035114024
ABSTRACT
Sorting processing is an object selection process based on certain specification. To make sorting to be easy so the automatically instrument object length sorting model are make. Unit control are use is digital circuit.
This sorting machine consist of conveyor, identification sensor, and object impeller mechanic. This sorting machine has a four object length selection. The object must be set up at the movement conveyor that pass an identification censor. After the object are detected by the cencor, the object are be entered in the box by the object impeller mechanic.
This sorter machine has been tested and is proved that it works well. The object sorted results has been appropriate the category, except at boundary area have 71,65 % level of efficacy.
Key word : sorter machine, implementation digital circuit, conveyor.
dengan judul “ Mesin Sortir Panjang Benda Berbsis Rangkaian Digital” ini dapat diselesaikan dengan baik. Tugas ahkir ini merupakan salah satu syarat untuk memperoleh gelar Sarjana pada program studi Teknik Elektro Universitas Sanata Dharma.
Pada proses pembuatan tugas ahkir ini penulis menyadari bahwa banyak pihak yang ikut membantu sehingga tugas ahkir ini dapat terselesaikan. Oleh karena itu pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Tuhan Yesus Kristus yang telah memberi kekuatan dan sebagai segala sumber inspirasiku.
2. Bapak Martanto, S.T., M.T. sebagai dosen pembimbing I yang telah bersedia memberikan bimbingan, ide, saran, dan waktu dalam menyelesaikan tugas ahkir ini.
3. Bapak Ir.Tjendro sebagai dosen pembimbing II yang telah bersedia memberikan bimbingan dan pengarahan dalam menyelesaikan tugas ahkir ini.
4. Mas mardi, mas Sur, mas ucup, mas broto yang telah ikut menghibur dalam menyelesaikan tugas ahkir ini.
5. Semua teman-teman teknik elektro yang sudah membantu dan memberi semangat dan inspirasi khususnya : Jacob (yang selalu setia menghampiri untuk bimbingan), Suryo dan Merry (yang setiap saat
dan duka khususnya Veda (yang selalu membantu membuat mekanik dan merelakan kamarnya menjadi bengkel), Gugun (yang telah mengantar ke pasar loak), Antok CB (yang telah membantu dalam ngeprin naskah), Hendry, Agung, Bowo.
7. Semua orang yang telah membantu dalam menyelesaikan tugas ahkir ini.
Penulis menyadari bahwa tugas ahkir ini masih memiliki banyak
kekurangan. Oleh karena itu semua kritik dan saran yang besifat membangun akan penulis terima dengan senang hati.
Yogyakarta, 24 Oktober 2007 Penulis
Ambrosius Hans Gigih Kurniadi
Lembar pengesahan oleh pembimbing ... Lembar pernyataan keaslian karya ... Halaman persembahan dan moto hidup ... Intisari ... Abstract... Kata pengantar ... Daftar Isi ... Daftar Gambar... Daftar Tabel ... BAB I PENDAHULUAN ... 1.1 Latar Belakang Masalah ... 1.2 Perumusan Masalah... 1.3 Tujuan dan Manfaat Penelitian... 1.4 Batasan Masalah ... 1.5 Metodologi Penulisan……….... 1.6 Sistematika Penulisan ... BAB II DASAR TEORI ... 2.1Inverter ...
2.2Gerbang AND ………...
2.3Penggrendel D (D Latch) ………..
2.4Laser pointer ……….
2.5Fototransistor ………
2.6Opto Coupler... 2.6.1 Opto Coupler Terhalang ON ... 2.6.2 Opto Coupler Terhalang OFF ...
2.7Pembanding ………...
2.8Transistor Sebagai Saklar ………..…… 2.9Relay ...
3.2Diagram Blok... 3.3Perancangan Sistem Elektronis……….. 3.3.1 Sensor Identifikasi ………... 3.3.2 Rangkaian Pusat Kendali ………
3.3.2.1Urutan Logika Identifikasi Benda……… 3.3.2.2Rangkaian Penyimpan Data………. 3.3.2.3Rangkaian Dekoder……….. 3.3.2.4Rangkaian Kontrol Dekoder………
a) Rangkaian Kontrol Dekoder Benda 1………… b) Rangkaian Kontrol Dekoder Benda 2………… c) Rangkaian Kontrol Dekoder Benda 3………… d) Rangkaian Kontrol Dekoder Benda 4………… 3.3.3 Pengendali Motor………. 3.3.3.1Penggerak Motor……….. 3.3.4 Rangkaian opto coupler………... BAB IV HASIL DAN PEMBAHASAN ………... 4.1 Bentuk Fisik………... 4.1.1 Sensor Identifikasi…..……….. 4.1.2 Mekanik Pendorong Benda ………..……… 4.1.3 Konveyor …………..……… 4.1.4 Kotak Benda ………... 4.1.5 Tombol Reset dan Saklar Power ……….. 4.2 Cara Kerja Alat ………. 4.3 Pengamatan Sistem ………... 4.3.1 Pengamatan Kerja Alat Keseluruhan ……… 1. Tingkat keberhasilan benda 1 ………. 2. Tingkat keberhasilan benda 2 ………. 3. Tingkat keberhasilan benda 3 ……….
4.3.2.3 Pengamatan Sistem Untuk Benda 3………. 4.3.2.4 Pengamatan Sistem Untuk Benda 4………. 4.3.3 Analisis Kejadian-kejadian Diluar Aturan Pemasukan
Benda ... 4.3.3.1 Urutan Pemasukan Benda... 4.3.3.2Spesifikasi Benda... BAB V KESIMPULAN DAN SARAN……….. DAFTAR PUSTAKA ... LAMPIRAN ...
72 74
76 76 81 83 84 85
Gambar 2-2. Simbol Gerbang AND……… Gambar 2-3. Gambar Rangkaian Flip-flop D……….. Gambar 2-4. Simbol logika flip-flop D……… Gambar 2-5. Laser pointer………... Gambar 2-6. Rangkaian Laser pointer………. Gambar 2-7. Cara Kerja Laser pointer……… Gambar 2-8. Rangkaian Fototransistor……… Gambar 2-9. Rangkaian Opto kopel terhalang ON... Gambar 2-10. Rangkaian Opto kopel terhalang OFF... Gambar 2-11 Pemasangan Resistor Opto Couple... Gambar 2-12. Rangkaian Pembanding……… Gambar 2-13. Transistor Sebagai Saklar……… Gambar 2-14. Karakteristik transistor sebagai saklar……….. Gambar 2-15 Simbol Relay... Gambar 2-16 Rangkaian transistor sebagai penggerak.relay... Gambar 2-17 Simbol-simbol dalam diagram ladder... Gambar 2-18 Rangkaian pengunci (latch)... Gambar 2-19. Skema motor DC……….. Gambar 2-20 Simbol Motor DC……….. Gambar 3-1. Mekanik Mesin Sortir Panjang Benda……… Gambar 3-2. Mekanik Pendorong Benda dan kotak benda………..
Gambar 3-6. Rangkaian Sensor Identifikasi……… Gambar 3-7. Bentuk gelombang rangkaian penyimpan data untuk
Benda 4……….. Gambar 3-8 Rangkaian Penyimpan Data……… Gambar 3-9. Rangkaian untuk Clear... Gambar 3-10. Rangkaian Dekoder……….. Gambar 3-11. Bentuk Gelombang Rangkaian Dekoder saat benda 1……….. Gambar 3-12. Gelombang rangkaian pusat kendali pada saat benda 1……… Gambar 3-13. Gelombang rangkaian pengunci………... Gambar 3-14. Rangkain pengunci untuk benda 1……… Gambar 3-15. Rangkaian kontrol dekoder untuk benda 1………... Gambar 3-16. Gelombang rangkaian pusat kendali pada saat benda 2……… Gambar 3-17. Rangkain pengunci untuk benda 2……… Gambar 3-18. Rangkaian kontrol dekoder untuk benda 2………... Gambar 3-19. Gelombang rangkaian pusat kendali pada saat benda 3……… Gambar 3-20. Rangkain pengunci untuk benda 3……… Gambar 3-21. Rangkaian kontrol dekoder untuk benda 3………... Gambar 3-22. Gelombang rangkaian pusat kendali pada saat benda 4……… Gambar 3-23. Rangkain pengunci untuk benda 4……… Gambar 3-24. Rangkaian kontrol dekoder untuk benda 4………... Gambar 3-25. Diagram ladder pendorong benda………....
Gambar 4-2. Bentuk fisik sensor identifikasi ………. Gambar 4-3. Bentuk fisik mekanik pendorong benda………. Gambar 4-4. Bentuk fisik konveyor………. Gambar 4-5. Bentuk fisik kotak benda……… Gambar 4-6. Penempatan tombol reset dan saklar power……… Gambar 4-7. Benda diletakkan diatas konveyor... Gambar 4-8. Benda dideteksi panjangnya... Gambar 4-9. Panjang benda terdeteksi……… Gambar 4.10. Benda menyentuh lengan 1……….. Gambar 4-11. Lengan 2 mendorong benda……….. Gambar 4-12. Penyotiran benda X………... Gambar 4-13 Grafik hubungan antara panjang benda dengan tingkat
keberhasilan keanggotaan benda1………. Gambar 4-14. Grafik hubungan antara panjang benda dengan tingkat
keberhasilan keanggotaan benda 2……… Gambar 4-15 Grafik hubungan antara panjang benda dengan tingkat
keberhasilan keanggotaan benda 3……… Gambar 4-16. Grafik hubungan antara panjang benda dengan tingkat
keberhasilan keanggotaan benda 4……… Gambar 4-17. Bentuk gelombang logika benda 1 pada percobaan... Gambar 4-18. Bentuk gelombang logika benda 1 pada perancangan...
Gambar 4-22. Bentuk gelombang logika benda 3 pada perancangan... Gambar 4-23. Bentuk gelombang logika benda 4 pada percobaan... Gambar 4-24. Bentuk gelombang logika benda 4 pada perancangan... Gambar 4-25 Error penyortiran benda 4 dan benda 2………. Gambar 4-26 Gelombang logika error penyortiran benda 4 dan benda 2 ……….. Gambar 4-27 Penyortiran berurutan... Gambar 4-28 Gelombang logika penyortiran berurutan... Gambar 4-29 Error penyortiran benda 4 dan benda 2………. Gambar 4-30 Gelombang logika penyortiran benda X... Gambar 4-31 Konstruksi Sensor Identifikasi... Gambar 4.32 Ketinggian pancaran sinar laser terhadap konveyor...
74 75 75 77 78 79 79 80 80 81 82
Tabel 2-1. Tabel kebenaran inverter……… Tabel 2-2. Tabel kebenaran inverter dalam bentuk biner……… Tabel 2-3. Tabel Kebenaran Gerbang AND……… Tabel 2-4. Tabel Kebenaran D Flip-flop……….. Tabel 3-1. Urutan Logika Identifikasi Benda……… Tabel 3-2. Tabel kebenaran rangkaian dekoder………... Tabel 4.1. Hasil pendeteksian benda dengan panjang antara 4,5 cm – 9,5 cm…… Tabel 4.2. Jumlah pendeteksian benda pada daerah perbatasan keanggotaan dalam 30 kali percobaan………. Tabel 4.3 Tingkat keberhasilan benda 1……….. Tabel 4.4 Tingkat keberhasilan benda 2……….. Tabel 4.5 Tingkat keberhasilan benda 3……….. Tabel 4.6 Tingkat keberhasilan benda 4……….. Tabel 4.7 Pengujian sistem untuk benda 1………... Tabel 4.8 Pengujian sistem untuk benda 2………... Tabel 4.9 Pengujian sistem untuk benda 3………... Tabel 4.10 Pengujian sistem untuk benda 4……….
1.1.
Latar Belakang Masalah
Dalam dunia industri, misalnya dalam industri pemotongan kayu, terdapat suatu kegiatan menyortir benda berdasarkan suatu spesifikasi tertentu, salah satunya adalah menyortir benda berdasarkan panjangnya. Penyortiran benda tersebut pada umumnya dilakukan secara manual dengan tenaga manusia. Penyortiran benda secara manual menjadi sangat merepotkan apabila benda yang disortir banyak dan panjangnya berbeda-beda. Selain itu, tingkat ketelitian dan efisiensi waktu juga menjadi masalah.
Untuk mengatasi permasalahan-permasalah tersebut, penelitian ini berupaya membuat suatu model peralatan yang dapat menyortir panjang benda secara otomatis berdasarkan rentang tertentu.
Dalam membantu sistem sortir panjang benda secara otomatis dibutuhkan sebuah pengendali yaitu suatu piranti yang digunakan untuk mengendalikan semua proses dalam perangkat elektonika yang akan dibuat. Implementasi pengendali yang digunakan yaitu rangkaian digital.
1.2.
Perumusan Masalah
Mesin sortir panjang benda ini menggunakan rangkaian digital sebagai kendali dan menggunakan konveyor dan mekanik pendorong benda sebagai penggerak benda.
Dari uraian tersebut, masalah yang didapat adalah :
1. Bagaimana membuat rangkaian digital sebagai kendali. 2. Bagaimana cara membuat rangkaian pengendali motor.
3. Bagaimana cara memasang sensor agar mencapai ketelitian 1 mm 4. Bagaimana cara membuat konveyor dan mekanik pendorong benda
sebagai penggerak benda.
1.3.
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah membuat suatu alat yang dapat bekerja secara otomatis untuk melakukan sortir berdasarkan panjang benda.
Babarapa manfaat yang diharapkan bisa didapatkan dari penelitian ini adalah sebagai berikut :
a. Meringankan pekerjaan pemakai dalam proses menyortir panjang benda
dengan rangkaian digital sebagai pengendali. b. Dapat dipakai sebagai referensi bagi mahasiswa yang melakukan tugas
1.4. Batasan Masalah
Untuk batasan masalah pada rangkaian “mesin sortir panjang benda berbasis rangkaian digital”, maka penulis akan menjelaskan spesifikasi alat yang digunakan pada rangkaian tersebut.
Basis rangkaian yang digunakan adalah rangkaian digital, sedangkan benda yang dipisahkan mempunyai empat kelompok benda yang diharapkan yaitu:
Benda 1: 5 cm s/d 6 cm Benda 2: 6,1 cm s/d 7 cm Benda 3: 7,1 cm s/d 8 cm Benda 4: 8,1 cm s/d 9 cm
Kelompok benda yang tidak diharapkan diberi nama benda X. Yang termasuk kelompok benda X yaitu benda yang mempunyai panjang kurang dari 5 cm dan benda yang mempunyai panjang lebih dari 9cm.
Dalam prosesnya alat ini dirancang untuk menyortir panjang benda dengan kelompok panjang benda yang sudah ditentukan, kemudian mengarahkan benda satu-persatu ke tempat yang sudah ditentukan. Sekali proses hanya satu benda yang dideteksi, jadi benda selanjutnya menunggu benda sebelumnya selesai diproses. Penggerak benda mengunakan konveyor dan mekanik pendorong benda dengan logika relay, motor dc digunakan sebagai pengerak konveyor dan mekanik pendorong benda.
yaitu dengan tinggi 3 cm dan lebar 3 cm, tetapi panjang benda berbeda-beda. Panjang benda yang dipisahkan memiliki panjang maksimal 20cm.
1.5.
Metodologi Penelitian
Metode yang digunakan dalam penelitian ini terdiri dari : a. Perumusan masalah.
b. Mengumpulkan referensi dan literatur.
c. Perancangan dan pembuatan alat yang terkonsep meliputi perancangan elektronik dan mekanik
d. Pengambilan data melalui percobaan dan pengukuran. e. Menganalisa data
f. Penyusunan laporan.
1.6.
Sistematika Penulisan
Sistematika penulisan ini terdiri dari 5 bab, yaitu :
Bab I membahas tentang latar belakang, tujuan penelitian, pembatasan masalah, perumusan masalah, metodologi penelitian dan sistematika pemulisan.
Bab II dasar teori berisi tentang teori-teori dasar yang digunakan oleh “mesin sortir panjang benda yang berbasis rangkaian digital”. Bab III menjelaskan tentang perancangan perangkat keras yang digunakan
Bab IV menjelaskan tentang pengamatan kerja, pengambilan data, dan analisa data dari perangkat keras yang telah dibuat.
2.1
Inverter
Sebuah inverter (pembalik) adalah gerbang dengan satu sinyal masukan
dan satu sinyal keluaran, dan keadaan keluarannya selalu berlawanan dengan
keadaan masukan. Operasi ini dirangkumkan pada tabel 2-1. Masukan rendah
menghasilkan keluaran tinggi, dan masukan tinggi akan menghasilkan keluaran
rendah. Tabel 2-2 menyajikan informasi serupa dalam bentuk biner; biner 0
bersesuaian dengan tegangan rendah (0 V s/d 0,8V) dan biner 1 mewakili
tegangan tinggi (2V s/d 5V).
Tabel 2-1. Tabel kebenaran inverter
Vin Vout
Rendah Tinggi
Tinggi Rendah
Tabel 2-2. Tabel kebenaran inverter dalam bentuk biner
A Y
0 1
1 0
Inverter disebut juga gerbang NOT (bukan), karena keluarannya tidak
sama dengan masukan. Keluaran inverter kadang-kadang disebut komplemen
(lawan) dari masukan. Simbol inverter dapat dilihat pada gambar 2-1.
Gambar 2-1. Simbol inverter
Untuk menunjukkan bagaimana gerbang logika NOT beroperasi maka
diperlukan aturan aljabar boolean. Pernyataan Boolean untuk gerbang NOT
adalah sebagai berikut :
Y = A ...(2.1)
2.2
Gerbang AND
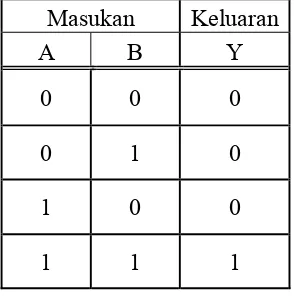
Gerbang AND mempunyai dua atau lebih sinyal masukan tetapi hanya
satu sinyal keluaran. Semua masukan harus dalam keadaan tinggi untuk
mendapatkan keluaran tinggi. Simbol dasar AND bisa dilihat pada gambar 2-2.
Masukan pada gerbang AND ditunjukkan pada simbol A dan B sedangkan
keluaran ditunjukkan pada simbol Y. Tabel kebenaran gerbang AND dapat dilihat
pada tabel 2-3. Setiap masukan dilambangkan dengan digit bilangan biner 1 dan 0.
Untuk nilai satu didefinisikan sebagai tegangan tinggi sedangkan untuk nilai 0
Gambar 2-2. Simbol Gerbang AND
Tabel 2-3. Tabel Kebenaran Gerbang AND
Masukan Keluaran A B Y
0 0 0
0 1 0
1 0 0
1 1 1
Untuk menunjukkan bagaimana gerbang logika AND beroperasi maka
diperlukan aturan aljabar boolean. Pernyataan Boolean untuk gerbang AND
dengan dua masukan adalah sebagai berikut :
Y=A.B………...2.2)
2.3
Penggrendel D (D Latch)
Fungsi dari latch yaitu mempertahankan logika tombol yang telah
diberikan setelah tombol dilepas. Penggrendel D merupakan D flip-flop yang nilai
keluarannya (Q) dapat mengikuti nilai D pada saat clock adalah tinggi. Dengan
kata lain , apabila bit data berubah pada saat clock adalah tinggi, nilai terakhir D
Penggrendel D dapat dibangun dengan menggunakan SR flip-flop (Set dan
Reset), yang pada masukannya ditambah dengan gerbang NAND dan NOT seperti
gambar 2-3, sedangkan simbol D flip-flop diperlihatkan pada gambar 2-4.
U4
INV
SRFF
S
R Q
U3
NAND2 U2
NAND2
Q D
Clock
Gambar 2-3. Gambar Rangkaian Flip-flop D
DFF
D
CLK
CL
RN
P
RN Q
Gambar 2-4. Simbol logika flip-flop D
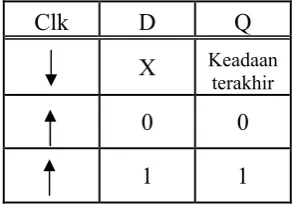
Pada tabel 2-4 akan diperlihatkan tabel kebenaran D Flip-flop.
Tabel 2-4. Tabel Kebenaran D Flip-flop
Clk D Q
X Keadaan
terakhir
0 0
2.4
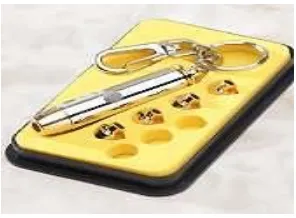
Laser Pointer
Laser pointer merupakan peralatan yang sering digunakan sebagai
penunjuk dalam presentasi. Bentuk dari laser pointer ini ditunjukkan pada gambar
2-5.
Gambar 2-5. Laser pointer
Didalam laser pointer terdapat dua komponen semikonduktor yaitu laser
diode (LD) dan photodiode (PD). Tegangan yang digunakan untuk
mengoperasikan laser pointer ini adalah 4,5 Volt. Rangkaian dasar laser pointer
ditunjukkan pada gambar 2-6.
Laser diode merupakan common katoda (LDC = Laser Diode Cathode)
yang akan dibias maju. Laser diode driver akan mengatur besarnya arus yang
mengalir pada laser diode berdasarkan arus yang dihasilkan oleh photodiode.
Photodiode merupakan common anoda (PDA = Photodiode Anode) yang akan
dibias balik. Besarnya arus yang dihasilkan pada photodiode berasal dari besarnya
intensitas cahaya laser diode yang tersorot kebelakang (ke arah photodiode)
seperti yang ditunjukkan pada gambar 2-7.
Gambar 2-7. Cara Kerja Laser pointer
Pada gambar 2-9 ditunjukkan bahwa laser pointer mempunyai tiga pin,
yaitu LDC, PDA, dan COM (Common Positive Terminal). Photodiode ini
digunakan untuk mengatur arus laser diode dengan sebuah eksternal loop
feedback.
2.5
Fototransistor
Fototransistor merupakan transistor yang peka terhadap cahaya pada kaki
basisnya. Transistor ini mempunyai kaki basis untuk menangkap sinar, sedangkan
Sinar yang masuk ke basis akan memicu terjadinya arus basis. Ketika ada
energi berupa cahaya yang masuk, maka elektron-elektron pada hold di daerah
basis akan keluar sehingga menjadi elektron bebas yang akan mengalir menuju
emiter, sehingga fototransistor menjadi aktif. Ketika fototransistor aktif, maka
arus pada kolektor sebanding dengan intensitas cahaya. Semakin besar intensits
cahaya yang masuk ke daerah basis, maka energi untuk membebaskan elektron
dari dalam hold akan semakin besar sehingga terjadi aliran elektron dari basis
menuju emiter. Semakin besar arus basis maka semakin besar pula arus kolektor
yang mengalir.
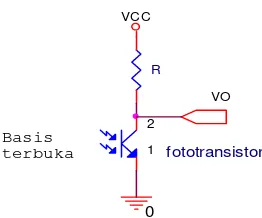
0
VCC
fototransistor
1 2
R
VO
Basis terbuka
Gambar 2-8. Rangkaian Fototransistor
Berdasarkan gambar 2-8, saat fototransistor aktif maka tegangan
outputnya sebagai berikut :
VO=Vcc-IcRc ……… (2.3)
Ic=β IB ……… (2.4) B
Dengan IB adalah arus yang dihasilkan oleh intensitas cahaya yang diterima basis. B
Sedangkan untuk menentukan nilai hambatan (R ) dapat menggunakan
persamaan berikut :
RC = C
CE
I V
Vcc−
……… .(2.5)
2.6
Opto Coupler
Opto coupler merupakan gabungan komponen dari laser pointer atau
infra merah dengan fototransistor, laser pointer atau infra merah digunakan
sebagai sumber cahaya untuk fototransistor. Sistem kinerja dasar dari opto
coupler yaitu saat sumber cahaya ke fototransistor tidak terhalang maka
fototransistor aktif dan saat sumber cahaya ke fototransistor terhalang maka
fototransistor tidak aktif. Dalam rangkaian perlu ditambahkan resistor yang
berfungsi sebagai pengaman laser pointer dan fototransistor.
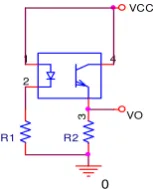
2.6.1 . Opto Coupler Terhalang ON
Opto coupler terhalang ON yaitu pada saat sumber cahaya ke
fototransistor tehalang maka tegangan keluaran (VO) mendekati nilai
tegangan masukan (Vcc). Tegangan keluaran diambil di atas
fototransistor.
R2
VO
0
1 2
3
4
R1
VCC
2.6.2. Opto Coupler Terhalang OFF
Opto coupler terhalang OFF yaitu pada saat sumber cahaya ke
fototransistor tehalang maka tegangan keluaran (VO) mendekati nilai nol,
shingga tegangan keluaran diambil di bawah fototransistor.
1
2
3
4
R2
VO
0
R1
VCC
Gambar 2-10. Rangkaian Opto coupler terhalang OFF
Opto coupler digunakan sebagai pemutus atau penyambung tegangan
dan arus dari rangkaian, dan yang mempengaruhi tegangan keluaran adalah letak
resistor seperti pada gambar 2-11.
R1
Vout Vin
R1
Vout Vin
(a) (b)
Gambar 2-11.Pemasangan ResistorOptoCoupler
(a)Tegangan keluaran mendekati nol , (b) Tegangan keluaran mendekati
2.7
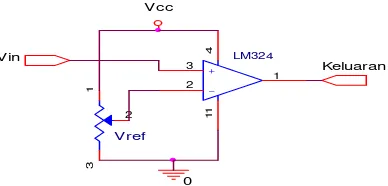
Pembanding
Penguat operasional (Op-Amp) sebagai pembanding merupakan penguat
DC yang digunakan dalam penerapan frekuensi rendah. Penguat opersional
sebagai pembanding mempunyai dua terminal masukan (tak membalik dan
membalik) dan satu tegangan keluaran. Bila tegangan tak membalik lebih besar
daripada tegangan membalik, pembanding menghasilkan tegangan keluar yang
tinggi. Bila masukan tak membalik lebih kecil daripada masukan membalik,
keluarannya rendah.
Rangkaian penguat opersional sebagai pembanding dapat digambarkan
seperti pada gambar 2-12.
0 Vcc
+
-LM324 3
2
1
4
11
Vref
1
3
2
Keluaran Vin
Gambar 2-12. Rangkaian Pembanding
Tegangan keluaran akan sama dengan Vcc apabila tegangan masukan Vin
lebih besar daripada tegangan referensi Vref. Sebaliknya apabila Vin lebih kecil
2.8
Transistor Sebagai Saklar
Transistor dua kutub (Bipolar Junction Transistor) adalah sebuah piranti
dari bahan semikonduktor, yang terdiri dari dua jenis yaitu npn dan pnp, yang
secara simbolik dapat dibedakan dengan memperhatikan arah anak panahnya.
Ketiga daerah bahan semikonduktor tersebut masing-masing dihubungkan dengan
terminal sebagi kolektor (c), basis (b), dan emitter (e). Transistor mempunyai tiga
daerah kerja yaitu :
1) Daerah jenuh (saturasi), adalah tegangan antara kaki kolektor dan
emitter mendekati 0 Volt atau kurang dari 0,3 Volt, atau daerah
jenuh terjadi bila kaki emitter dan kaki basis berprasikap maju.
untuk transistor silikon adalah 0,2 Volt. )
(sat CE
V
2) Daerah cut-off (putus), adalah kaki emitter dan kaki kolektor
berprasikap balik atau arus basis dan arus kolektor sama dengan nol.
3) Daerah aktif, adalah daerah diantara daerah jenuh dan daerah cut-off.
Daerah aktif terjadi bila kaki emitter diberi prasikap maju dan kaki
kolektor diberi prasikap balik. Pada derah aktif arus kolektor
sebanding dengan arus basis.
Untuk menggerakkan relay dapat digunakan transistor yang berfungsi
sebagai saklar. Transistor yang digunakan sebagai saklar bekerja di daerah cut-off
dan jenuh (saturasi). Rangkaian transistor sabagai saklar dapat dilihat pada
Gambar 2-13. Transistor Sebagai Saklar
Transistor akan berfungsi sebagai saklar terbuka pada saat di daerah
terpancung, sedangkan akan berfungsi sebagai saklar tertutup pada saat di daerah
jenuh, karakteristik transistor sebagai saklar dapat dilihat pada gambar 2-14.
CE
Gambar 2-14. Karakteristik transistor sebagai saklar.
Dengan menggunakan hukum Kirchoff tegangan, maka besarnya arus
kolektor ( Ic) dapat dicari yaitu :
CE C C CE C CE C V Vcc R I V Vcc VR V VR Vcc − = − = = + + − . 0 C CE C R V Vcc
Pada keadaan jenuh maka tegangan antara kaki kolektor dan emitter ( ) dan
arus kolektor adalah sebagai berikut :
CE
V
= (sat) ………..(2.7)
CE
V VCE
IC (sat) =
C CE
R sat V
Vcc− ( )
……….…... .(2.8)
Karena transistor bekerja pada keadaan jenuh ( mendekati 0 Volt) maka nilai
dapat diabaikan sehingga arus kolektor pada keadaan jenuh menjadi :
CE
V
CE
V
IC(sat) =
C
R Vcc
……….………(2.9)
Sedangkan arus basis dalam keadaan jenuh yaitu :
IB(min) =
β
) (sat IC
……… ..(2.10)
Transistor bekerja dalam keadaan jenuh apabila I >I (min). Besar arus I dapat
dicari dengan menggunakan hukum kirchoff tegangan yaitu sebagai berikut :
B B B
-V + VR + VB B BE = 0
VR = V - VB B BE
IB = B BE B R V V − ……… (2.11)
= 0 ……… ..(2.12)
B I
= Vcc ……… (2.13)
CE
V
2.9
Relay
Relay adalah suatu piranti yang akan aktif bila ada arus listrik sehingga
akan timbul medan magnet pada koil, yang berfungsi untuk mengoperasikan
kontak. Relay mempunyai konektor-konektor seperti pada saklar manual, tetapi
relay dikendalikan dengan menggunakan tegangan dari luar. Relay terdiri dari dua
keadaan yaitu Normally Closed (NC) dan Normally Open (NO) seperti pada
gambar 2-15.
a. Normally Closed (NC)
Normally Closed adalah kondisi kontak mula-mula adalah terhubung
(tertutup), dan apabila diberi arus yang mencukupi pada kumparannya maka
kontak menjadi terbuka.
b. Normally Open (NO)
Normally Open adalah kondisi mula-mula kontak adalah terbuka, dan
apabila diberi arus yang mencukupi pada kumparannya maka kontak menjadi
terhubung (tertutup).
NC
NO COM
INPUT .
RELAY 3
5
4 1 2
Tegangan input pada relay dapat dikendalikan menggunakan transistor,
yang berfungsi sebagai saklar atau penggerak relay. Pada saat transistor diberi
tegangan, maka relay akan “ON” sedangkan pada saat transistor tidak diberi
tegangan, maka relay akan “OFF”. Rangkaian transistor sebagai penggerak relay
dapat dilihat pada gambar 2-16.
Relay
Vin
Vcc
COIL
DIODE
NPN RB
Gambar 2-16 Rangkaian transistor sebagai penggerak relay
Pada gambar 2-16 dioda diperlukan untuk melindungi transistor dari
tegangan balik pada saat transistor ON ke OFF.
2.10
Diagram
Ladder
Diagram ladder menggambarkan logika dalam bentuk grafik. Diagram ini
dikembangkan dari kontak-kontak relay yang terstruktur yang menggambarkan
aliran arus listrik. Dalam diagram ladeer terdapat dua buah garis vertikal dimana
garis vertikal sebelah kiri dihubungkan dengan Vcc dan garis sebelah kanan
dihubungkan dengan ground. Dibawah kondisi yang benar, listrik dapat mengalir
disebut sebagai ladder line (garis tangga). Peraturan secara umum dalam
penulisan diagram ladder adalah :
a) Arus mengalir dari garis vertikal sebelah kiri ke garis vertikal
sebelah kanan.
b) Output koil (kumparan relay) tidak boleh dihubungkan secara
langsung di garis vertikal sebelah kiri.
c) Tidak ada kontak yang diletakkan disebelah kanan output koil.
d) Hanya diperbolehkan satu output koil pada satu garis horisontal
(rung).
Simbol-simbol yang sering digunakan dalam diagram ladder dapat dilihat
seperti pada gambar 2-17.
(a) Koil relay
(b) Kontak normally closed
(c) Kontak normally open
(e) Normally close push button
(d) Normally open push button
(f) SPST switch
(g) Motor DC
Gambar 2-17. Simbol-simbol dalam diagram ladder
Pada gambar 2-18 memperlihatkan contoh penggunaan diagram ladder
PB1
Ground Vcc
CR
CR
Gambar 2-18. Rangkaian pengunci (latch)
Berdasarkan gambar 2-18, pada saat PB1 (input) ditekan maka keluaran
akan dikunci (latching) dengan menggunakan kontak hasil keluaran itu sendiri,
sehingga walaupun input sudah berubah, kondisi output tetap.
2.11
Motor DC
Motor DC (Direct Current) adalah suatu peralatan listrik yang mengubah
energi listrik menjadi energi mekanis atau putaran dengan prinsip elektronis.
Motor DC membutuhkan tegangan DC untuk bekerja. Prinsip kerja dari motor DC
adalah sebuah lilitan yang diletakkan dalam suatu medan magnet. Pada saat lilitan
tersebut dialiri arus listrik searah maka akan timbul medan magnet buatan. Karena
berada dalam medan magnet permanen maka terjadilah perpotongan medan
magnet sehingga lilitan menerima gaya tolak dan mendorong lilitan untuk
berputar.
Pada gambar 2-19 saat lilitan berputar maka komutator juga akan ikut
berputar, komutator adalah sebuah plat tembaga berbentuk cincin yang terbelah.
Komutator ini berfungsi membalik arah arus dalam lilitan sehingga terjadi
perubahan arah arus yang menyebabkan lilitan jangkar berputar terus. Arus listrik
masuk melalui sikat dan dengan mengubah arah arus pada sikat, maka dapat
menentukan putaran motor searah putaran jarum jam atau berlawanan arah
putaran jarum jam. Simbol motor DC ditunjukkan pada gambar 2-20.
DC
3.1
Perancangan Mekanik
Secara garis besar perancangan mekanik Mesin Sortir Panjang Benda
Berbasis Rangkaian Digital dapat dilihat pada gambar 3-1.
Gambar 3-1. Mekanik Mesin Sortir Panjang Benda Berbasis Rangkaian Digital
Dari gambar 3-1 terdapat beberapa fungsi dari tiap bagian sebagai berikut:
1. Sensor Identifikasi
Sensor identifikasi berfungsi untuk mengidentifikasikan benda yang
disortir. Sensor yang digunakan pada sensor identifikasi adalah opto
coupler terhalang ON gabungan antara laser pointer dan fototransistor.
2. Mekanik Pendorong Benda
Mekanik pendorong benda berfungsi untuk memasukkan benda hasil sortir
ke kotak benda. Pada mekanik pendorong benda terdapat 4 bagian yaitu
pendorong benda 1, benda 2, benda 3, dan benda 4. Salah satu bentuk
mekanik pendorong benda ditunjukkan pada gambar 3-2.
Gambar 3-2. Mekanik pendorong benda dan kotak benda.
Pada gambar 3-2 gerakan lengan dipengaruhi oleh sensor posisi..
Sensor PB1, PB4, dan PB5 menggunakan tombol push button normaly
open, sensor PB2 menggunakan tombol push button normaly close,
sedangkan sensor S3 menggunakan rangkaian opto coupler gabungan
antara led infra merah dan fototransistor. Sensor posisi PB1, PB2, S3,
Motor 1 berfungsi untuk menggerakkan Lengan 1, dan Motor 2 befungsi
untuk menggerakkan Lengan 2.
3. Kotak Benda
Bentuk mekanik kotak benda ditunjukkan pada gambar 3-2. Pada kotak
benda terdapat sensor reset yang menggunakan rangkaian opto coupler
gabungan antara led infra merah dan fototransistor. Pada saat benda
melewati sensor reset maka sensor reset akan mereset rangkaian pusat
kendali.
4. Konveyor
Bentuk mekanik konveyor ditunjukkan pada gambar 3-3. Konveyor
berfungsi untuk membawa benda dari tempat benda sebelum diidentifikasi
melewati sensor identifikasi kemudian ke mekanik pendorong benda dan
kotak benda X. Motor 3 berfungsi untuk menggerakkan konveyor.
Gambar 3-3 Bentuk mekanik konveyor
5. Saklar power dan tombol reset
Saklar power berfungsi untuk menghidupkan dan mematikan mesin sortir.
3.2
Diagram Blok
Diagram blok perancangan mesin sortir panjang benda dapat dilihat pada
gambar 3-4 berikut.
Gambar 3-4. Diagram blok perancangan
Penjelasan secara umum dari diagram blok pada gambar 3-4 adalah
sebagai berikut :
1. Blok sensor identifikasi
Pada perancangan, sensor identifikasi digunakan untuk memberikan
data masukan ke bagian pusat kendali.
2. Blok pusat kendali
Pada blok pusat kendali, kendali yang digunakan yaitu rangkaian
digital. Pusat kendali berfungsi sebagai penerima data masukan dari
sensor identifikasi, penerima data masukan dari sensor reset, dan
memberi instruksi ke pengendali motor. Blok pusat kendali terdiri dari
a. Penyimpan data
Rangkaian penyimpan data berfungsi untuk menyimpan data
secara sementara, blok ini mendapat masukan dari sensor
identifikasi dan sensor posisi.
b. Dekoder
Rangkaian dekoder berfungsi untuk mengkodekan data dari
rangkaian penyimpan data.
c. Kontrol dekoder
Rangkaian kontrol dekoder berfungsi untuk mengkontrol
keluaran dari rangkaian dekoder.
3. Blok pengendali motor
Blok pengendali motor berfungsi untuk mengendalikan mekanik
pendorong benda dan konveyor. Blok kendali motor mendapat
instruksi kendali pusat dan sensor posisi.
4. Blok sensor posisi
Sensor posisi digunakan dalam perancangan untuk mendeteksi posisi
lengan mekanik pendorong benda.
5. Blog sensor reset
Sensor reset berfungsi untuk mereset rangkaian pengendali utama.
6. Blok mekanik pendorong benda
Pada perancangan ini mekanik pendorong benda digunakan untuk
3.3
Perancangan Sistem Elektronis
Komponen penyusun perancangan sistem elektronis terdiri dari sensor
identifikasi, rangkaian pusat kendali, pengendali motor, sensor posisi. Bagian ini
akan menjelaskan komponen penyusun sistem elektronis.
3.3.1
Sensor Identifikasi
Pada sensor identifikasi digunakan rangkaian opto coupler yang terdiri
dari laser pointer dan fototransistor. Laser pointer digunakan sebagai pemancar
cahaya. Cahaya yang dipancarkan laser pointer dapat fokus ke satu titik sehingga
diharapkan dapat mencapai ketelitian 1mm.
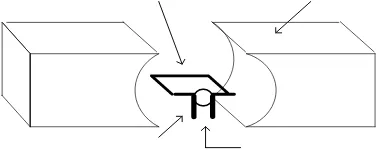
Pemasangan sensor identifikasi agar dapat menyortir benda dengan
ketelitian 1mm harus memiliki jarak antar sensor seperti pada gambar 3-5 :
Gambar 3-5. Pemasangan sensor laser pointer
Pada sensor identifikasi ini menggunakan rangkaian opto coupler
terhalang ON yang dihubungkan dengan op-Amp sebagai pembanding dan
potensiometer sebagai pengatur sensitivitas sensor. Rancangan rangkaian sensor
VCC 1 2 R2 + -LM324 3 2 1 4 11 R4 Pot 1 3 2 Laser Pointer R1 Keluaran Phototransistor 0
Gambar 3-6. Rangkaian sensor identifikasi
Dari gambar 3-6 maka akan dicari nilai R1 dan R2. Nilai Vcc yang
digunakan dalam rangkaian ini adalah 5 Volt. Arus yang mengalir pada Laser
pointer (LP) dirancang adalah 20mA, VLP =2,4 Volt (dari datasheet) sehingga
nilai R1 dapat dicari sebagai berikut :
VCC = VLP + VR1
VCC = VLP + IR1.R1
1 1 R LP I V Vcc
R = − ... (3.1)
Ω = = − = 130 20 6 , 2 1 20 4 , 2 5 1 m R m R
Dari perhitungan diatas maka diperoleh nilai R1 = 130Ω, sehingga digunakan
nilai resistor yang ada dipasaran 150Ω. Untuk mencari nilai R2 fototransistor
dibuat agar berada pada kondisi saturasi (phototransistor tidak terhalang) dengan
menentukan VCE (saat saturasi)= 0.2 Volt dan IC = 4,8mA. Sehingga dengan
Ω = − = − = − k x R I V V R C CE CC 1 10 8 , 4 2 , 0 5 2 2 3
Untuk memastikan saat keadaan ini saturasi maka dipilih nilai R2 lebih besar dari
1 kΩ, misalnya nilai R2 = 10kΩ.
Prinsip kerja dari rangkaian sensor opto coupler pada gambar 3-5 adalah
sebagai berikut :
a. Saat fototransistor tidak mendapat sinar dari laser pointer pada maka
fototransistor dalam keadaan mati. Dengan demikian tegangan pada
kolektor (Vc) akan sama dengan Vcc. Tegangan kolektor ini akan
dimasukkan ke terminal tak pembalik pada komparator. Disini Vc akan
dibandingkan dengan tegangan referensi (Vref). Mula-mula Vref diatur
pada tegangan 2,5 Volt menggunakan potensio 10 KΩ. Karena nilai Vc
lebih besar daripada Vref maka keluaran op-Amp akan sama dengan Vcc.
b. Saat fototransistor mendapat sinar dari laser pointer, maka fototransistor
berada pada keadaan jenuh. Sehingga Vc sama dengan ground. Nilai Vc
dibandingkan dengan Vref, karena nilai Vc lebih kecil daripada Vref maka
keluaran op-Amp sama dengan ground.
3.3.2
Rangkaian Pusat Kendali
Rangkaian pusat kendali ini dirancang agar dapat mengendalikan semua
proses dalam menyortir barang. Komponen penyusun perancangan rangkaian
data, rangkaian dekoder, rangkaian kontrol dekoder. Bagian ini akan menjelaskan
rangkaian penyusun pusat kendali.
3.3.2.1 Urutan Logika Identifikasi Benda
Untuk merancang rangkaian pada pusat kendali maka harus ditentukan
dahulu urutan logika identifikasi benda. Berdasarkan pada gambar 3-5, benda
yang akan disortir berjalan dari kiri ke kanan yaitu dari arah sensor A ke sensor F,
sehingga urutan logika identifikasi benda dapat dilihat pada tabel 3-1.
Tabel 3-1. Urutan Logika Identifikasi Benda
Berdasrkan pada tabel 3-1, sensor A disini digunakan untuk
mengendalikan proses penyortiran, yaitu pada saat logika sensor A dari ‘1’ ke ‘0’
maka pada saat itu juga logika sensor lainya akan disimpan pada rangkaian
penyimpan data, sedangkan logika pada step selanjutnya akan diabaikan.
3.3.2.2 Rangkaian Penyimpan Data
Pada perancangan ini diharapkan dapat membuat sebuah rangkaian yang
dapat menyimpan data secara sementara. Berdasarkan tabel 3-1 misalnya pada
benda 4, data sensor B, C, D. E, F akan disimpan pada saat sensor A berlogika “1”
selanjutnya akan diabaikan. Contoh gelombang rangkaian penyimpan data yang
diharapkan dapat dilihat pada gambar 3-7.
Gambar 3-7. Bentuk gelombang rangkaian penyimpan data untuk benda 4
Dari gambar 3-7 sensor A sampai dengan sensor F merupakan masukan
rangkaian penyimpan data, sedangkan QB sampai dengan QF merupakan keluaran
dari rangkaian penyimpan data.
Berdasarkan dasar teori flip-flip D yang sudah dibahas pada BAB II, maka
dapat diketahui bahwa flip-flop D dapat digunakan sebagai penyimpan data.
Untuk membangun rangkaian penyimpan data, maka digunakan tabel kebenaran
D flip-flop pada tabel 2-4. Penyimpan data sementara oleh D flip-flop dipengaruhi
oleh clock-nya dengan cara di-drive oleh pulsa clock yang sama. Pada saat pulsa
clock naik, data masukan dimuatkan ke dalam flip-flop dan data akan muncul
pada keluaran. Selanjutnya pada saat pulsa clock turun, maka keluaran akan
Berdasarkan urutan logika pada tabel 3-1, maka pada perancangan ini
sensor A akan digunakan sebagai clock rangkaian penyimpan data karena pada
saat sensor A berlogika “1” ke “0” maka pada saat itu juga logika sensor B C D E
F akan di simpan.
Pada perancangan ini diharapkan pada saat sensor A berlogika tinggi maka
data akan masuk, dan pada saat sensor A berlogika rendah maka data akan di
simpan, sehingga digunakan D flip-flop terpicu pinggiran positif dengan sensor A
diberi gerbang NOT sebagai clock-nya, seperti yang diperlihatkan pada gambar
3-8. U5 DFF D CLK CL RN P RN Q U4 DFF D CLK CL RN P RN Q U3 DFF D CLK CL RN P RN Q U2 DFF D CLK CL RN P RN Q U1 DFF D CLK CL RN P RN Q U6 INV
Sensor A / Clock
Sens or B Sens or C Sens or D Sens or E Sens or F
QB QC QD QE QF
Clear
Gambar 3-8 Rangkaian penyimpan data.
Dari gambar 3-8 misalkan sensor B C D E F = 1 1 1 1 0 dan pada saat sensor A
(clock) berlogika “1” ke “0” maka QB QC QD QE QF = 1 1 1 1 0, artinya data
disimpan.
Rangkaian penyimpan data ini mendapat instruksi masukan untuk
me-clear yaitu dari tombol reset dan sensor reset pada kotak benda. Sensor reset pada
kotak benda yang digunakan untuk me-clear yaitu sensor SA (pada kotak benda
dan SX (pada kotak benda X), sehingga rangkaian penyimpan data ini
membutuhkan rangkaian untuk clear seperti pada gambar 3-9.
U1 AND6 1 2 3 4 5 6 7 NOT 1 2 NOT 1 2 NOT 1 2 NOT 1 2 NOT 1 2 NOT 1 2 . . . . . .
Gambar 3-9. Rangkaian untuk clear
3.3.2.3 Rangkaian Dekoder
Rangkaian dekoder merupakan kelanjutan dari rangkaian penyimpan data,
yaitu untuk menentukan termasuk ke dalam kelompok benda yang mana keluaran
dari rangkaian penyimpan data tersebut. Berdasarkan tabel 3-1, maka dapat dibuat
tabel kebenaran untuk rangkaian dekoder sebagai berikut :
Tabel 3-2. Tabel kebenaran rangkaian dekoder
Input Output
B C D E F Benda 1 Benda 2 Benda 3 Benda 4
1 0 0 0 0 1 0 0 0
1 1 0 0 0 0 1 0 0
1 1 1 0 0 0 0 1 0
1 1 1 1 0 0 0 0 1
Berdasarkan tabel 3-2 maka dapat ditulis persamaan Boolean sebagai
Benda 1 = B.C.D.E.F
Benda 2 = B.C.D.E.F
Benda 3 = B.C.D.E.F
Benda 4 = B.C.D.E.F
Berdasarkan persamaan Boolean di atas maka rangkaian dekoder dapat
digambarkan seperti pada gambar 3-10.
U14 INV U12 INV U13 INV U15 INV U19 AND5 1 2 3 4 5 6 U20 AND5 1 2 3 4 5 6 U21 AND5 1 2 3 4 5 6 U22 AND5 1 2 3 4 5 6 Benda 2 B Benda 3 D C F E Benda 4 Benda 1
Gambar 3-10. Rangkaian dekoder
Pada gambar 3-10 misalnya masukan B C D E F = 1 0 0 0 0, maka
keluaran pada benda 1 akan belogika tinggi untuk lebih jelasnya dapat di lihat
Gambar 3-11. Bentuk gelombang rangkaian dekoder saat benda 1
3.3.2.4 Rangkaian Kontrol Dekoder
Rangkaian kontrol dekoder berfungsi untuk mengontrol keluaran
rangkaian dekoder agar memperoleh gelombang keluaran rangkaian pusat kendali
seperti yang diharapkan. Rangkaian kontrol dekoder ini terdiri dari beberapa
rangkaian yang akan dijelaskan sebagai berikut:
a)
Rangkaian Kontrol Dekoder Benda 1
Gelombang keluaran rangkaian pusat kendali pada saat benda 1
Gambar 3-12. Gelombang keluaran rangkaian pusat kendali pada benda 1
Pada tabel 3-2 saat input B C D E F = 1 0 0 0 0 maka output rangkaian
dekoder pada benda 1 akan berlogika “1” terus, maka supaya memperoleh
gelombang keluaran seperti yang diharapkan pada gambar 3-12
diperlukan rangkaian kontrol untuk benda 1. Rangkaian kontrol ini memanfaatkan
sensor C yaitu saat sensor C berlogika “1” maka pada saat itu juga keluaran dari
rangkaian pusat kendali benda 1 berlogika “0” terus seperti pada gambar 3-12,
oleh karena itu diperlukan rangkaian pengunci. Gelombang rangkaian pengunci
yang diharapkan diperlihatkan pada gambar 3-13.
Untuk membangun rangkaian pengunci ini digunakan D flip-flop dengan
menggunakan tabel kebenaran D flip-flop pada tabel 2-4 maka rangkaiannya
dapat dirancang seperti pada gambar 3-14.
VCC
Sensor C
Clear
Keluaran Q
QN D
CLK
PR
N
CL
RN
Gambar 3-14. Rangkain pengunci untuk benda 1
Dari gambar 3-14 data masukan diberi logika tinggi terus (Vcc),
sedangkan sensor C digunakan sebagai clok. Pada saat sensor C berlogika “0”
maka keluaran rangkaian pengunci NOT (QN) berlogika “1” karena data belum
disimpan, kemudian pada saat sensor C berlogika “1” maka QN berlogika “0”
artinya data disimpan, maka QN akan kembali ke logika “1” apabila rangkaian
pengunci di-clear. Masukan untuk clear menggunakan rangkaian clear seperti
pada gambar 3-9.
Supaya memperoleh gelombang yang diinginkan seperti pada gambar 3-12
maka keluaran rangkaian pengunci benda 1 di-AND-kan dengan keluaran
rangkaian dekoder pada benda 1 seperti pada gambar 3-15.
b) Rangkaian Kontrol Dekoder Benda 2
Gelombang keluaran rangkaian pusat kendali pada saat benda 2
diharapkan seperti pada gambar 3-16.
Gambar 3-16. Gelombang rangkaian pusat kendali pada saat benda 2
Pada tabel 3-2 saat input B C D E F = 1 1 0 0 0 maka output rangkaian
dekoder pada benda 2 akan berlogika “1” terus, maka supaya memperoleh
gelombang keluaran seperti yang diharapkan pada gambar 3-16 diperlukan
rangkaian kontrol untuk benda 2 Rangkaian kontrol yang digunakan sama dengan
rangkaian kontrol pada benda 1 yaitu menggunakan rangkaian pengunci hanya
saja sensor yang digunakan untuk clock berbeda. Rangkaian pengunci pada
rangkaian kontrol untuk benda 2 ini menggunakan sensor D sebagai clock-nya
VCC
Sensor D OUT
Clear
Q
QN D
CLK
PR
N
CL
RN
Gambar 3-17. Rangkain pengunci untuk benda 2
Supaya memperoleh gelombang yang diinginkan seperti pada gambar 3-16
maka keluaran rangkaian pengunci benda 2 di-AND-kan dengan keluaran
rangkaian dekoder pada benda 2 seperti pada gambar 3-18.
Ke rangkaian pengendali motor
Benda 2 Dari rangkaian
pengunci benda 2
Dari rangkaian dekoder pada
benda 2
Gambar 3-18. Rangkaian kontrol dekoder untuk benda 2
c)
Rangkaian Kontrol Dekoder Benda 3
Gelombang keluaran rangkaian pusat kendali pada saat benda 2
Gambar 3-19. Gelombang rangkaian pusat kendali pada saat benda 3
Pada tabel 3-2 saat input B C D E F = 1 1 1 0 0 maka output rangkaian
dekoder pada benda 3 akan berlogika “1” terus, maka supaya memperoleh
gelombang keluaran seperti yang diharapkan pada gambar 3-19 diperlukan
rangkaian kontrol untuk benda 3 Rangkaian kontrol yang digunakan sama dengan
rangkaian kontrol pada benda 1 dan benda 2 yaitu menggunakan rangkaian
pengunci hanya saja sensor yang digunakan untuk clock berbeda. Rangkaian
pengunci pada rangkaian kontrol untuk benda 3 ini menggunakan sensor E
sebagai clock-nya yang diperlihatkan seperti pada gambar 3-20.
VCC
Sensor E OUT
Clear
Q
QN D
CLK
PR
N
CL
RN
Supaya memperoleh gelombang yang diinginkan seperti pada gambar 3-19
maka keluaran rangkaian pengunci benda 3 di-AND-kan dengan keluaran
rangkaian dekoder pada benda 3 seperti pada gambar 3-21.
Gambar 3-21. Rangkaian kontrol dekoder untuk benda 3
d)
Rangkaian Kontrol Dekoder Benda 4
Gelombang keluaran rangkaian pusat kendali pada saat benda 4
diharapkan seperti pada gambar 3-22.
Gambar 3-22. Gelombang rangkaian pusat kendali pada saat benda 4
Pada tabel 3-2 saat input B C D E F = 1 1 1 1 0 maka output rangkaian
dekoder pada benda 4 akan berlogika “1” terus, maka supaya memperoleh
rangkaian kontrol untuk benda 4 Rangkaian kontrol yang digunakan sama dengan
rangkaian kontrol pada benda 1, 2 dan 3 yaitu menggunakan rangkaian pengunci
hanya saja sensor yang digunakan untuk clock berbeda. Rangkaian pengunci pada
rangkaian kontrol untuk benda 4 ini menggunakan sensor F sebagai clock-nya
yang diperlihatkan seperti pada gambar 3-23.
VCC
Sensor F OUT
Clear
Q
QN D
CLK
PR
N
CL
RN
Gambar 3-23. Rangkain pengunci untuk benda 4
Supaya memperoleh gelombang yang diinginkan seperti pada gambar 3-21
maka keluaran rangkaian pengunci benda 4 di-AND-kan dengan keluaran
rangkaian dekoder pada benda 4 seperti pada gambar 3-24.
3.3.3
Pengendali Motor
Rangkaian pengendali motor digunakan untuk mengendalikan mekanik
pendorong benda dan konveyor. Rangkaian ini menggunakan logika latch
(pengunci) dengan sistem relay untuk mengendalikan putaran motor.
Kendali motor ini terdiri dari kendali kotak 1 (untuk benda 1), kotak 2
(untuk benda 3), kotak 3 (untuk benda 3), kotak 4 (untuk benda 4), dan kotak X
(untuk benda X). Kendali pada masing-masing kotak mempunyai logika dan
rangkaian yang sama hanya saja yang berbeda adalah masukannya dari rangkaian
pusat kendali. Kendali pendorong benda dan konveyor dirancang berdasarkan
pada gambar 3-2 dan gambar 3-3 dengan urutan logika sebagai berikut :
1. Pada saat kendali pendorong benda mendapat sinyal masukan dari
rangkaian pusat kendali maka lengan 1 akan bergerak maju kemudian
berhenti setelah menyentuh sensor PB2.
2. Benda diatas konveyor yang berjalan akan menyentuh lengan 1 (sensor S3
aktif) maka konveyor akan berhenti dan lengan 2 akan bergerak maju
untuk mendorong benda kedalam kotak.
3. Pada saat lengan 2 menyentuh sensor PB5 maka lengan 1 dan lengan 2
akan mundur ke posisi awal secara bersama-sama, kemudian lengan 1
akan berhenti setelah menyentuh sensor PB1 dan lengan 2 akan berhenti
setelah menyentuh sensor PB4.
4. Saat lengan 1 menyentuh PB1 dan lengan 2 menyentuh sensor PB4 maka
konveyor akan kembali berputar dan kendali pendorong benda ini siap
Bedasarkan urutan logika diatas maka dapat dirancang rangkaian
pengendalinya dengan diagram ladder pada gambar 3-25, dengan tombol “K”
merupakan simbol masukan dari rangkaian pusat kendali.
Keterangan :
1. Posisi 1 saat power ON maka konveyor akan langsung berputar searah
jarum jam (posisi 10), ketika tombol “K” aktif maka CR1A aktif sehingga
motor 1 berputar searah jarum jam (posisi 8), karena motor 1 berputar
maka PB1 menjadi open. Kemudian motor 1 berhenti pada saat PB2 aktif.
2. Posisi 2, saat S3 aktif maka CR2A aktif sehingga motor 3 berhenti, dan
CR3A juga aktif sehingga motor 2 berputar searah jarum jam (posisi 9).
Karena motor 2 berputar maka PB4 menjadi open (posisi 6).
3. Posisi 4, pada saat PB5 aktif maka CR1B, CR3B dan CR4 aktif sehingga
motor 1 dan motor 2 berputar berlawanan arah jarum jam.
4. Posisi 5, pada saat PB1 aktif (closed) maka motor 1 berhenti.
5. Posisi 6, pada saat PB4 aktif (closed) maka motor 2 berhenti.
6. Pada saat PB1 dan PB4 aktif maka CR2A mati sehingga motor 3 akan
kembali berputar searah jarum jam.
3.3.3.1
Penggerak Motor
Rangkaian penggerak motor dirancang agar dapat mengaktifkan motor,
yaitu dengan mengaktifkan relay yang berfungsi untuk menghubungkan motor
DC dengan catu daya. Pada rangkaian ini digunakan transistor NPN 2N2222
sebagai saklar yaitu dengan menghubungkan input (basis transistor) dengan
keluaran rangkaian pusat kendali, dan kolektor transistor dengan relay
Relay Input +V 12V 12VCOIL DIODE NPN RB
Gambar 3-26. Rangkaian Penggerak Motor DC
Prinsip kerja gambar 3-26 yaitu sebagai berikut :
a. Pada saat tegangan yang masuk ke basis transistor 5 Volt, maka arus
akan melewati basis transistor sehingga transistor ON, hal ini akan
menyebabkan relay menjadi aktif (hidup).
b. Pada saat tegangan yang masuk ke transistor kurang dari 0,7 volt maka
tidak ada arus yang melewati basis sehingga transistor akan OFF, hal
ini akan menyebabkan relay menjadi tidak aktif (mati).
Berdasarkan gambar 3-25 maka diukur nilai Rc sama dengan besarnya
hambatan kumparan relay yaitu 170 Ω. Berdasarkan persamaan 2.10 maka nilai IC
dapat dicari sebagai berikut.
IC = 170 12V
= 70,6 mA
IB (min) =
min β Ic = 100 6 , 70 mA
= 0,7mA
Input transistor didapat dari rangkaian digital. Arus keluaran rangkaian
digital minimal 30 mA (dari data sheet) sehingga mampu untuk mengaktifkan
Transistor akan bekerja dengan baik apabila > (min). Tegangan
keluaran dari pusat kendali ( ) sebesar 5 Volt, (min) = 0,7 adalah harga
arus yang diharapkan tepat akan menyebabkan transistor menjadi jenuh
(saturasi). Agar lebih pasti dalam keadaan jenuh maka nilai >> (min),
misalnya = 10 x (min) = 7 mA sehingga nilai dapat dicari sebagai
berikut :
B
I IB
B
V IB mA
B
I
B
I IB
B
I IB RB
= B R B BE B I V V − = B
R − −3 Ω
10 . 70 7 , 0 5
= 6 KΩ
B
R
Dari hasil perhitungan diatas maka didapat nilai RB = 6 KΩ sehingga digunakan
nilai yang mendekati nilai tersebut dan ada dipasaran yaitu RB=6,8 KΩ.
Untuk melindungi transistor dari tegangan balik pada saat transistor ON ke
OFF maka digunakan dioda sebagai pengaman transistor.
3.3.4
Rangkaian
opto coupler
Rangkaian opto coupler ini digunakan sensor posisi (S3) dan sensor reset
(pada kotak benda). Rangkaian ini menggunakan rangkaian opto coupler
terhalang ON yang terdiri led infra merah dan fototransistor yang dihubungkan
dengan op-Amp (sebagai pembanding) dan potensio sebagai pengatur sensitivitas
VCC 0 1 2 R2 + -LM324 3 2 1 4 11 R4 Pot 1 3 2 Infra Red R1 Keluaran Phototransistor
Gambar 3-27. Rangkaian Sensor Posisi
Dari rangkaian diatas maka akan dicari nilai R1 dan R2. Nilai Vcc yang
digunakan dalam rangkaian ini adalah 5 Volt. Arus yang mengalir pada Infra Red
(IR) dirancang 20mA dan Volt (dari datasheet), sehingga dengan
mengacu pada persamaan 3.1 maka nilai R1 dapat dicari sebagai berikut : 25 , 1 = IR V Ω = = − = 5 , 187 20 75 , 3 1 20 25 , 1 5 1 m R m R
Dari hasil perhitungan diatas maka didapat nilai R1 = 187,5 Ω, sehingga
digunakan nilai yang mendekati nilai tersebut dan ada dipasaran yaitu R1=150 Ω.
Untuk mencari nilai R2 sama pada rangkaian sensor posisi dengan laser dioda
4.1 Bentuk Fisik
Bentuk fisik alat yang dibuat ditunjukkan pada gambar 4.1. Mesin sortir yang dibuat terdiri dari sensor identifikasi, mekanik pendorong benda, kotak benda, konveyor, tombol reset, dan saklar power.
Gambar 4.1. Bentuk fisik rangkaian mesin sortir panjang benda
4.1.1
Sensor Identifikasi
Sensor identifikasi terdiri dari fototransistor dan laser pointer. Penempatan fototransistor dan laser pointer ditunjukkan seperti pada gambar 4-2 pada bagian yang diberi nama. Fungsi sensor ini adalah untuk mendeteksi panjang benda.
Gambar 4-2. Bentuk fisik sensor identifikasi
4.1.2
Mekanik Pendorong Benda
Pada mekanik pendorong benda terdapat 4 buah pendorong yaitu pendorong benda 1, pendorong benda 2, pendorong benda 3, dan pendorong benda 4. Masing-masing pendorong mempunyai bentuk fisik yang hampir sama. Bentuk fisik salah satu mekanik pendorong benda ditunjukkan seperti pada gambar 4-3. Setiap pendorong benda terdiri dari lengan 1 dan lengan 2. Lengan 1 berfungsi untuk menahan benda dan lengan 2 berfungsi untuk memasukkan benda ke dalam kotak. Pembahasan lebih lanjut mengenai fungsi masing-masing lengan terdapat pada bagian cara kerja alat.
4.1.3
Konveyor
Bentuk fisik konveyor ditunjukkan seperti pada gambar 4-4. Pada konveyor terdapat gear box yang berfungsi untuk meningkatkan torsi motor dc.
Gambar 4-4. Bentuk fisik konveyor
4.1.4
Kotak Benda
Pada mesin ini mempunyai 5 buah kotak benda yaitu untuk benda 1, benda 2, benda 3, benda 4, dan benda X. Kotak benda ini berfungsi untuk menampung benda hasil sortir . Masing-masing kotak benda mempunyai bentuk fisik yang hampir sama, salah satunya ditunjukkan pada gambar 4-5. Pada kotak benda terdapat sensor reset yang terdiri dari led infra merah dan fototransistor yang berfungsi untuk mereset rangkaian pengendali utama.
4.1.5
Tombol Reset dan Saklar Power
Penempatan tombol reset dan saklar power seperti ditunjukkan pada gambar 4-6. Saklar power berfungsi untuk menghidupkan dan mematikan mesin sortir. Tombol reset berfungsi untuk mereset rangkaian pengendali utama apabila terjadi error.
Gambar 4-6. Penempatan tombol reset dan saklar power
4.2
Cara Kerja Alat
Gambar 4-7. Benda diletakkan diatas konveyor
Setelah benda diletakkan di atas konveyor maka benda akan melewati sensor identifikasi seperti yang ditunjukkan pada gambar 4-8. Pada bagian ini benda akan dideteksi panjangnya oleh sensor identifikasi.
Gambar 4-8. Benda dideteksi panjangnya
Gambar 4-9. Panjang benda terdeteksi
Berdasarkan gambar 4-9 lengan 1 berfungsi untuk menahan benda, menghentikan konveyor, dan mengaktifkan lengan 2. Pada lengan 1 terdapat sensor posisi yang terdiri dari fototransistor dan led infra merah.. Pada saat benda menyentuh lengan 1 seperti yang diperlihatkan pada gambar 4-10, maka konveyor akan berhenti dan pada saat itu juga lengan 2 akan bergerak maju mendorong benda ke dalam kotak seperti yang ditunjukkan pada gambar 4-11.
Gambar 4-11. Lengan 2 mendorong benda
Setelah benda terdorong oleh lengan 2 dan masuk kedalam kotak maka benda akan mengaktifkan sensor reset yang terdapat pada kotak benda. Setelah sensor reset aktif maka sistem akan kembali kekeadaan semula. Setelah lengan 2 maju mendorong benda kedalam kotak maka lengan 1 dan lengan 2 akan mundur ke posisi semula secara bersamaan. Setelah lengan 1 dan lengan 2 kembali pada posisi semula maka konveyor akan kembali berputar dan mesin sortir siap untuk melakukan penyotiran kembali.
Gambar 4-12. Penyotiran benda X
Pada saat benda masuk ke dalam kotak maka benda akan mengaktifkan sensor reset yang terdapat di dalam kotak benda. Setelah sensor reset aktif maka sistem akan kembali kekeadaan semula dan mesin sortir siap untuk melakukan penyotiran kembali.
4.3
Pengamatan Sistem
4.3.1
Pengamatan Kerja Alat Keseluruhan
Keterangan tabel :
X = Kelompok benda X 1 = kelompok benda 1 2 = kelompok benda 2 3 = kelompok benda 3 4 = kelompok benda 4
Berdasarkan pada tabel 4.1 maka dapat dikelompokkan rentang panjang benda sebagai berikut :
1) Benda X memiliki rentang panjang benda 4,5 cm s/d 4,9 cm dan 9,1 cm s/d 9,5 cm.
2) Benda 1 memiliki rentang panjang benda 5 cm s/d 6 cm 3) Benda 2 memiliki rentang panjang benda 6,1 cm s/d 7 cm 4) Benda 3 memiliki rentang panjang benda 7,1 cm s/d 8 cm 5) Benda 4 memiliki rentang panjang benda 8,1 cm s/d 9 cm
Tabel 4.2. Jumlah pendeteksian benda pada daerah perbatasan keanggotaan dalam 30 kali percobaan.
Panjang benda
(cm) benda 1 benda 2 benda 3 benda 4 benda X
4.8 0 0 0 0 30
4.9 0 0 0 0 30
5 23 0 0 0 7
5.1 30 0 0 0 0
5.2 30 0 0 0 0
5.8 30 0 0 0 0
5.9 30 0 0 0 0
6 30 0 0 0 0
6.1 3 27 0 0 0
6.2 0 30 0 0 0
6.8 0 30 0 0 0
6.9 0 30 0 0 0
7 0 30 0 0 0
7.1 0 8 22 0 0
7.2 0 0 30 0 0
7.8 0 0 30 0 0
7.9 0 0 30 0 0
8 0 0 30 0 0
8.1 0 0 16 14 0
8.2 0 0 0 30 0
8.8 0 0 0 30 0
8.9 0 0 0 30 0
9 0 0 0 30 0
9.1 0 0 0 5 25
9.2 0 0 0 0 30
Berdasarkan tabel 4.2 maka dapat diketahui bahwa terdapat kesalahan penyotiran pada daerah batas keanggotaan yaitu pada benda yang mempunyai panjang 5 cm, 6,1 cm, 7,1 cm, 8,1 cm, dan 9,1 cm.. Dari adanya kesalahan tersebut maka akan dicari persentase tingkat keberhasilan penyortiran dengan persamaan :
Error =
harusnya DataYangSe rjadi DataYangTe harusnya DataYangSe −
Berdasarkan persamaan 4.1 maka akan ditunjukkan besarnya tingkat keberhasilan pada daerah perbatasan keanggotaan dalam 30 kali percobaan sebagai berikut :
1. Tingkat keberhasilan benda 1
Pada tabel 4.3 akan ditunjukkan tingkat keberhasilan keanggotaan benda 1 yang dibandingkan berdasarkan pada perancangan.
Tabel 4.3 Tingkat keberhasilan benda 1. Panjang benda (cm) Percobaan (%) Perancangan (%)
5 76,6 100
5.1 100 100
5.2 100 100
5.8 100 100
5.9 100 100
6 100 100
Berdasarkan tabel 4.3 maka dapat dibuat grafik hubungan antara panjang benda dengan tingkat keberhasilan seperti yang ditunjukkan pada gambar 4-13.
GRAFIK HUBUNGAN ANTARA PANJANG BENDA DENGAN TINGKAT KEBERHASILAN KEANGGOTAAN
0 20 40 60 80 100 120
5 5.1 5.2 5.8 5.9 6
PANJANG BENDA (cm)
T ING KA T KE BE R HA S IL A (% ) Percobaan Perancangan
Berdasarkan tabel 4.1 dan gambar 4-13 dapat diketahui bahwa pada percobaan dengan panjang benda 5 cm tingkat keberhasilannya hanya 76,6 % dari yang diharapkan pada perancangan 100%.
2. Tingkat keberhasilan benda 2
Pada tabel 4.4 akan ditunjukkan tingkat keberhasilan keanggotaan benda 2 yang dibandingkan berdasarkan pada perancangan.
Tabel 4.4 Tingkat keberhasilan benda 2. Panjang benda (cm) Percobaan (%) Perancangan (%)
6.1 90 100
6.2 100 100
6.8 100 100
6.9 100 100
7 100 100
Berdasarkan tabel 4.4 maka dapat dibuat grafik hubungan antara panjang benda dengan tingkat keberhasilan seperti yang ditunjukkan pada gambar 4-14.
GRAFIK HUBUNGAN ANTARA PANJANG BENDA DENGAN TINGKAT KEBERHASILAN KEANGGOTAAN
84 86 88 90 92 94 96 98 100 102
6.1 6.2 6.8 6.9 7
PANJANG BENDA (cm)
T IN G KA T KE BE R HA S IL A (%
) Percobaan
Perancangan
Berdasarkan tabel 4.4 dan gambar 4-14 dapat diketahui bahwa pada percobaan dengan panjang benda 6,1 cm tingkat keberhasilannya hanya 90 % dari yang diharapkan pada perancangan 100 %.
3. Tingkat keberhasilan benda 3.
Pada tabel 4.5 akan ditunjukkan tingkat keberhasilan keanggotaan benda 3 yang dibandingkan berdasarkan pada perancangan.
Tabel 4.5 Tingkat keberhasilan benda 3. Panjang benda (cm) Percobaan (%) Perancangan (%)
7.1 73,4 100
7.2 100 100
7.8 100 100
7.9 100 100
8 100 100
Berdasarkan tabel 4.5 maka dapat dibuat grafik hubungan antara panjang benda dengan tingkat keberhasilan seperti yang ditunjukkan pada gambar 4-15.
GRAFIK HUBUNGAN ANTARA PANJANG BENDA DENGAN TINGKAT KEBERHASILAN KEANGGOTAAN
0 20 40 60 80 100 120
7.1 7.2 7.8 7.9 8
PANJANG BENDA (cm)
T ING KAT KE BE RHAS IL A (%) Percobaan Perancangan
Berdasarkan tabel 4.5 dan gambar 4-15 dapat diketahui bahwa pada percobaan dengan panjang benda 7,1 cm tingkat keberhasilannya hanya 73,4 % dari yang diharapkan pada perancangan 100%.
4. Tingkat keberhasilan benda 4.
Pada tabel 4.6 akan ditunjukkan tingkat keberhasilan keanggotaan benda 4 yang dibandingkan berdasarkan pada perancangan.
Tabel 4.6 Tingkat keberhasilan benda 4. Panjang benda (cm) Percobaan (%) Perancangan (%)
8.1 46,6 100
8.2 100 100
8.8 100 100
8.9 100 100
9 100 100
Berdasarkan tabel 4.6 maka dapat dibuat grafik hubungan antara panjang benda dengan tingkat keberhasilan seperti yang ditunjukkan pada gambar 4-16.
GRAFIK HUBUNGAN ANTARA PANJANG BENDA DENGAN TINGKAT KEBERHASILAN KEANGGOTAAN
0 20 40 60 80 100 120
8.1 8.2 8.8 8.9 9
PANJANG BENDA (cm)
T ING KA T KE BE RHAS IL A (%
) Percobaan
Perancangan
Gambar 4-16. Grafik hubungan antara panjang benda dengan tingkat keberhasilan keanggotaan benda 4