KARENA GANGGUAN UNIT PEMBANGKIT
Diajukan Sebagai Salah Satu Syarat Guna Memperoleh Gelar Sarjana Program Studi Teknik Elektro
Disusun Oleh:
Nama : HANIF GUNTORO Nim : 01400 – 037
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
Saya yang bertanda tangan di bawah ini:
Nama : Hanif Guntoro
Nim : 01400 – 037
Fakultas/Jurusan : Teknologi Industri/Teknik Elektro Peminatan : Teknik Tenaga Listrik
Judul Tugas Akhir : “DINAMIKA FREKUENSI SISTEM KARENA GANGGUAN UNIT PEMBANGKIT”
Menyatakan bahwa tugas akhir ini hasil karya sendiri dan bukan publikasi yang pernah dipublikasikan. Demikian pernyataan ini saya buat dengan sebenar – benarnya.
Jakarta,…….Agustus, 2007
TUGAS AKHIR
DINAMIKA
FREKUENSI SISTEM
KARENA GANGGUAN UNIT PEMBANGKIT
NAMA : Hanif Guntoro NIM : 01400 – 037
Disetujui dan disahkan Oleh:
Koordinator Tugas Akhir Pembimbing
(Yudhi Gunardi, ST.MT) (DR.Hamzah Hilal) Ketua Jurusan Elektro
“Dinamika Frekuensi Sistem Karena Gangguan Unit Pembangkit”.
Pada sistem interkoneksi terdapat banyak pusat pembangkit listrik dan pusat beban yang dihubungkan satu sama lain oleh saluran transmisi. Karena saling terhubung itulah maka operasi dari pusat pembangkit listrik saling mempengaruhi satu sama lain terhadap kualitas dan keandalan tenaga listrik dari sistem interkoneksi tersebut. Penyediaan atau pembangkitan daya aktif dalam sistem dari pusat-pusat pembangkit harus disesuaikan dengan kebutuhan pelanggan atas daya aktif dan daya aktif yang tersedia tergantung kepada daya terpasang unit-unit pembangkit dalam sistem dan dari kesiapan operasi unit-unit pembangkit.
Daya aktif berhubungan erat dengan nilai frekwensi sistem, sedangkan frekwensi merupakan indikator keseimbangan antara daya aktif yang dibangkitkan dengan total beban (pemakaian) pada suatu sistem tenaga listrik, sehingga apabila sistem kehilangan daya aktif yang dibangkitkan oleh unit pembangkit maka nilai frekuensi sistem juga akan mengalami penurunan. Laju penurunan frekuensi ini tergantung dari besarnya daya aktif yang hilang dan momen inersia dari sistem.
Dari hasil analisis didapati bahwa semakin besar daya yang hilang dari sistem yang sebanding dengan daya tersedia dari unit pembangkit yang mengalami gangguan mendadak atau trip, maka akan semakin cepat laju penurunan frekuensi.
BAB I
PENDAHULUAN
1.1 LATAR BELAKANG MASALAH
Saat ini PT. PLN (Persero) mempunyai sistem transmisi listrik di Pulau Jawa yang terhubung dengan Pulau Bali dan Pulau Madura yang disebut dengan Sistem Interkoneksi Jawa-Madura-Bali (JAMALI) dan di bagi menjadi 4 region (Region Jakarta Raya dan Banten, Region Jawa Barat, Region Jawa Tengah dan Region Jawa Timur) dan 1 sub region (Region Bali). Saluran transmisi ini bekerja pada Tegangan Tinggi 150 kV dan Tegangan Ekstra Tinggi 500 kV.
Pada sistem interkoneksi ini terdapat 140 pusat pembangkit listrik hydro-thermis dengan daya terpasang sebesar 20.559 MW dan beberapa pusat-pusat beban (yang disebut gardu induk, disingkat GI) yang dihubungkan satu sama lain oleh saluran transmisi, Karena saling terhubung itulah maka operasi dari pusat-pusat pembangkit listrik akan saling mempengaruhi satu sama lain terhadap kualitas dan keandalan tenaga listrik di sistem interkoneksi tersebut. Penyediaan atau pembangkitan daya aktif dari pusat-pusat pembangkit harus disesuaikan dengan kebutuhan pelanggan atas daya aktif dan daya aktif yang tersedia tergantung pada daya terpasang dari unit-unit pembangkit yang tergabung dalam sistem dan dari kesiapan operasi unit-unit pembangkit.
Daya aktif berhubungan erat dengan frekuensi, sedangkan nilai frekuensi sistem merupakan indikator keseimbangan antara daya aktif yang dibangkitkan oleh pusat-pusat pembangkit dengan total beban (pemakaian), sehingga apabila
sistem kehilangan daya aktif yang dibangkitkan oleh unit pembangkit karena terjadi gangguan mendadak atau trip, maka frekuensi sistem akan mengalami penurunan, sedangkan nilai frekuensi juga merupakan salah satu syarat mutu tenaga listrik sehingga pihak PT. PLN (Persero) harus mampu menyediakan nilai frekuensi yang relatif konstan yaitu sebesar 50 Hertz, penyimpangan nilai frekuensi dari nilai nominal harus selalu dalam batas toleransi yang diperbolehkan.
1.2 TUJUAN PENULISAN
Adapun tujuan dari penulisan tugas akhir ini adalah:
a. Untuk membahas hubungan antara daya aktif yang dibangkitkan oleh generator dengan frekuensi di sistem.
b. Untuk mengetahui prinsip kerja peralatan governor dalam kaitannya dengan pengaturan frekuensi dalam satu sistem interkoneksi.
c. Untuk menganalisis dinamika frekuensi sistem karena gangguan mendadak dari unit pembangkit yang sedang beroperasi, dalam kaitannya dengan interaksi yang terjadi antara pusat-pusat pembangkit listrik dan pusat-pusat beban yang beroperasi dalam satu sistem interkoneksi.
1.3 RUANG LINGKUP
Hasil akhir dari penulisan tugas akhir ini adalah berupa analisis. Di sini akan di analisis mengenai dinamika frekuensi yang terjadi dalam sistem apabila salah satu unit pembangkit PLTU Tanjung Jati B yang sedang beroperasi mengalami gangguan mendadak atau trip.
PLTU Tanjung jati B merupakan pembangkit listrik dengan energi listrik yang dibangkitkan per generatornya terbesar di Indonesia pada saat ini, yaitu sebesar 722 MW dengan daya mampu pasok sebesar 660 MW. Pada PLTU Tanjung Jati B terdapat 2 unit pembangkit dengan karakteristik yang sama sehingga total daya listrik yang dibangkitkan sebesar 1320 MW, untuk mensuplai sekitar 6,5% dari total energi listrik yang ada guna memenuhi kebutuhan energi listrik di Pulau Jawa, Bali dan Madura, karena kontribusinya yang cukup besar itulah maka segala sesuatu yang terjadi pada unit-unit pembangkit PLTU Tanjung Jati B dapat mempengaruhi keseluruhan sistem interkoneksi, yang pada intinya berpengaruh terhadap keandalan dan kualitas listrik yang di suplai.
1.4 METODE PENULISAN
Metode penulisan yang digunakan sebagai bahan acuan untuk mendapatkan data-data dalam pembuatan tugas akhir ini adalah sebagai berikut :
a. Metode Literatur, Untuk mendukung pembahasan dan analisis maka penulis mengambil bahan-bahan dari beberapa literature, buku-buku perpustakaan dan internet.
b. Metode Formulasi, Di sini ada beberapa formulasi yang dipergunakan untuk analisa.
c. Metode Observasi dan Survey, untuk menunjang analisis penulis memperoleh data-data mengenai kapasitas dan spesifikasi generator dan kemampuan pasok dari PLTU Tanjung Jati B dan data-data tentang analisa beban dan kemampuan pasok pembangkit untuk sistem Jawa-Bali dari web-site PT. PLN (Persero).
d. Metode Identifikasi, Di sini penulis akan mengidentifikasi masalah secara lebih spesifik yaitu berupa penurunan frekuensi sistem saat terjadi gangguan pada unit pembangkit PLTU Tanjung Jati B
1.5 SISTEMATIKA PENULISAN
Tugas akhir ini di tulis dalam lima bab dengan penjelasan yang berupa teori-teori dan rumus. Pada bab dua berisi penjelasan singkat tentang pengertian-pengertian dalam elektromekanis dan pengaruh dinamika rotor dalam kaitannya antara daya aktif dan frekuensi. Sedangkan pada bab tiga memuat penjelasan secara lengkap mengenai prinsip kerja governor dalam kaitannya dengan pengaturan frekuensi akibat perubahan frekuensi di sistem dan teori tentang penurunan frekuensi sistem akibat gangguan unit pembangkit disertai dengan rumus-rumus (formulasi).
Bab empat berisi penjelasan mengenai analisis dinamika frekuensi sistem pada saat unit #2 PLTU Tanjung Jati B yang sedang beroperasi secara tiba-tiba mengalami gangguan pada kondisi beban penuh, 715 MW, sehingga mengalami penurunan beban hingga 281 MW, berikut grafik penurunan frekuensinya. Sedangkan untuk kesimpulan dari hasil analisis dan saran di tulis pada bab lima.
BAB II
ELEKTROMEKANIS PADA SISTEM TENAGA
LISTRIK
2.1 GAYA GERAK LISTRIK
Apabila sebuah konduktor dengan panjang efektif ℓ digerakkan tegak lurus sejauh
ds dan memotong suatu medan magnet dengan kerapatan fluks B, maka perubahan fluks pada konduktor tersebut adalah :
dφ = Bℓds (2.1) Dari hukum faraday, diketahui bahwa gaya gerak listrik (ggl) dinyatakan dengan: e = dt dφ (2.2) atau, e = dt ds Bl (2.3) dan jika dt ds = v = kecepatan, maka e = Bℓv (2.4)
Persamaan (2.4) dapat diartikan bahwa apabila dalam medium medan magnet diberikan energi mekanik untuk menghasilkan kecepatan (v), maka akan dibangkitkan energi listrik (e), dan ini merupakan prinsip dasar dari generator. Arah gaya gerak listrik ini ditentukan oleh aturan tangan kanan, dimana ibu jari, telunjuk dan jari tengah saling tegak lurus, dengan ibu jari menunjukan arah
kecepatan (v), telunjuk menunjukan arah kerapatan fluks (B) dan jari tengah menunjukan arah energi listrik (e).
Gambar 2,1 Generator yang dihubungkan dengan sebuah beban
Bila konduktor tersebut dihubungkan dengan beban misalnya suatu tahanan (gambar 2.1) maka pada konduktor tersebut akan mengalir arus listrik (I) atau energi mekanik berubah menjadi energi listrik. Arus listrik (I) yang mengalir pada konduktor tadi, merupakan medan magnet pula dan akan berinteraksi dengan medan magnet yang telah ada (B). interaksi medan magnet merupakan gaya reaksi (lawan) terhadap gerak mekanik yang di berikan. Agar konversi energi mekanik ke energi listrik dapat berlangsung, energi mekanik yang yang berikan haruslah lebih besar dari gaya reaksi tadi.
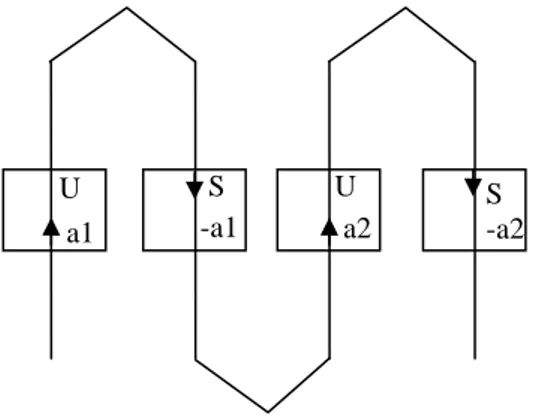
2.2 KARAKTERISTIK MESIN SINKRON
Suatu mesin sinkron dengan kumparan medan 4 kutub, kumparan jangkarnya terdiri atas 2 kumparan yaitu a1, -a1 dan a2, –a2 seperti tampak pada gambar 2.1.
kedua kumparan tersebut bila dihubungkan secara seri akan berbentuk seperti gambar 2.2.
Gambar 2.1 Mesin sinkron dengan kumparan medan 4 kutub.
U S U S
-a2
a1 -a1 a2
Gambar 2.2 Hubungan seri kumparan jangkar mesin sinkron 4 kutub.
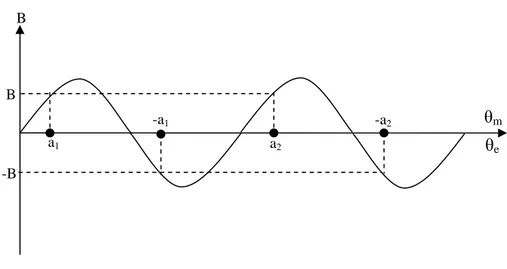
Kerapatan fluks B yang ditimbulkan akibat berputarnya kumparan medan akan berbentuk sinusoida terhadap ruang (sebagai fungsi ruang, bukan fungsi waktu). Sehingga distribusi fluks B terhadap ruang digambarkan terlihat pada gambar 2.2
B -B B a1 -a1 a2 -a2 θm θe
Gambar 2.3 kerapatan fluks B akibat berputarnya kumparan medan.
Pada mesin empat kutub seperti pada gambar 2.1, terlihat bahwa setiap satu kali putaran mesin, tegangan induksi yang di timbulkan sudah menyelesaikan dua siklus penuh, atau dengan kata lain 360° perputaran mekanik sama dengan 720° perputaran listrik, karena itu secara umum dapat dituliskan sebagai berikut:
m e pθ θ 2 = (2.5) dimana: p = jumlah kutub e θ = sudut listrik m θ = sudut mekanik
Dari persamaan (2.5) diketahui bahwa untuk setiap satu siklus tegangan
yang dihasilkan, mesin akan menyelesaikan 2
p
kali putaran.
Karena itu frekuensi gelombang tegangan adalah:
f = 60 2 n x p , (2.6)
dimana:
n = rotasi per menit (rpm)
Kecepatan sinkron untuk mesin arus bolak-balik lazim dinyatakan dengan:
p f ns
120
= (2.7) Jadi untuk generator sinkron yang bekerja pada frekuensi 50 Hz dan mempunyai jumlah kutub dua (p = 2), maka kecepatan putaran mesin tersebut adalah: ns 3000rpm 2 50 . 120 = =
2.3 DINAMIKA ROTOR DAN PERSAMAAN AYUN
Persamaan yang mengatur gerakan rotor suatu mesin serempak didasarkan pada prinsip dasar dalam dinamika rotor yang menyatakan bahwa momen-putar percepatan atau torsi adalah hasil kali dari momen-kelembaman (momen-inersia) rotor dan percepatan sudut, dan ditulis dalam persamaan:
2 2 dt d J T = θ ( N-m) (2.8) Dimana:
J = momen-kelembaman total (momen inersia)dari massa rotor dalam kg-m2. θ = pergeseran sudut dari rotor terhadap suatu sumbu diam dalam radian.
t = waktu dalam detik.
Karena θ diukur terhadap suatu sumbu pedoman yang diam pada stator, maka nilai θ akan terus bertambah dengan waktu, dan dapat dinyatakan sebagai berikut :
dimana:
ω = kecepatan sudut atau sama juga dengan frekuensi listrik serempak
δ = sudut listrik antara suatu titik pada rotor dan rangka patokan serempak.
Seringkali besarnya δ diambil sama dengan sudut daya mesin sinkron. Sehingga turunan dari persamaan (2.9) terhadap waktu adalah:
dt dθ = ω + dt dδ (2.10) dan, 2 2 dt d θ = 2 2 dt d δ (2.11)
Dengan memasukan persamaan (2.11) ke dalam persamaan (2.8), maka akan diperoleh: 2 2 dt d J T = δ (2.12)
Persamaan (2.12) ini dikenal sebagai persamaan ayun (swing equation) dan digunakan untuk mengetahui dinamika elektromekanis suatu mesin sinkron. Besarnya daya percepatan yang disimpan adalah sama dengan momen putar dikalikan dengan kecepatan sudut atau dituliskan dengan persamaan:
ω . T P= (2.13) dimana: ω = dt dθ
dalam radian per detik (rad/det)
Dengan memasukkan persamaan (2.12) ke persamaan (2.13) maka akan diperoleh: 2 2 dt d J P= ω δ (2.14)
dimana:
P = daya listrik
Koefisien Jω adalah momen sudut (angular momentum) rotor, pada kecepatan serempak ω, momen ini dinyatakan dengan M dan disebut dengan konstanta inersia, maka persamaan (2.14) dapat juga dituliskan sebagai berikut:
2 2 dt d M P= δ (2.15) dimana:
M = konstanta inersia, yang dinyatakan dalam Mega Joule-detik Per derajat listrik.
Untuk studi kestabilan, diperlukan suatu konstanta lagi yang ada hubungannya dengan kelembaman atau momen inersia, yaitu konstanta H yang didefinisikan sebagai daya kinetis yang tersimpan pada kecepatan serempak dibagi dengan rating mesin dalam MVA, atau dapat dituliskan dengan :
H = G JW2 2 1 = G MW 2 1 (MJ/MVA) (2.16) dimana:
G = rating daya mesin serempak dalam MVA
Dengan bentuk lain untuk M pada persamaan (2.16), ditulis:
M =
W GH
2
(2.17)
Bila persamaan (2.17) ini disubstitusikan ke persamaan (2.15), maka akan diperoleh; P = 2 2 2 dt d x W GH δ (2.18)
Persamaan (2.18) disebut dengan persamaan ayunan mesin atau persamaan dasar yang mengatur dinamika (gerak) perputaran dari mesin serempak dalam studi kestabilan. Karena ω = 2πf dan berubah terhadap waktu, maka persamaan (2.18) dapat juga dituliskan sebagai berikut:
P = 2 2 60 . . dt d x f GH δ π (2.19) atau, P = 2 2 180 dt d x f GH δ (2.20)
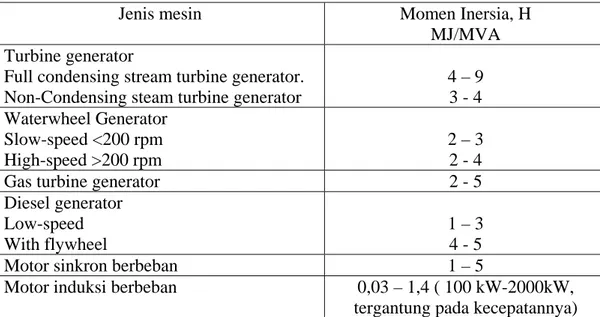
Nilai dari kelembaman atau momen inersia, H, untuk beberapa jenis mesin dapat dilihat dari tabel 2,1.
Tabel 2.1 Momen inersia dari beberapa jenis mesin listrik.
Jenis mesin Momen Inersia, H
MJ/MVA Turbine generator
Full condensing stream turbine generator. Non-Condensing steam turbine generator
4 – 9 3 - 4 Waterwheel Generator Slow-speed <200 rpm High-speed >200 rpm 2 – 3 2 - 4
Gas turbine generator 2 - 5
Diesel generator Low-speed With flywheel
1 – 3 4 - 5
Motor sinkron berbeban 1 – 5
Motor induksi berbeban 0,03 – 1,4 ( 100 kW-2000kW,
tergantung pada kecepatannya)
2.4 HUBUNGAN DAYA AKTIF DAN FREKUENSI
Dalam sistem tenaga listrik, umumnya digunakan generator sinkro fasa tiga untuk pembangkit tenaga listrik yang utama, maka pengaturan frekuensi sistem praktis tergantung pada karakteristik dari generator sinkron tersebut.
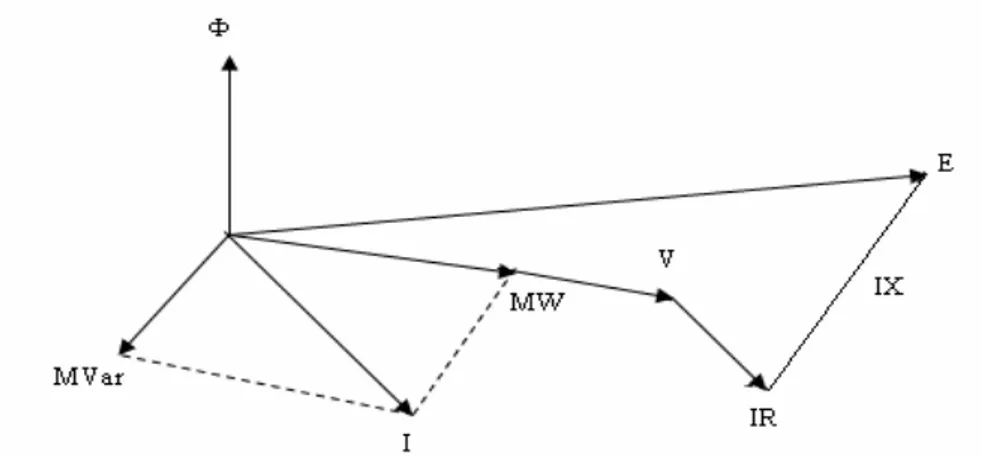
Gambar 2.4 Diagram Vektor dari fluks magnetik (Φ), Gaya Gerak Listrik(E), Arus (I) dan Tegangan Jepit (V) dari sebuah Generator sinkron.
Pengaturan arus medan generator (gambar 2.1) hanya akan mempengaruhi panjang pendeknya vektor, yang selanjutnya akan mempengaruhi pula panjang
pendeknya vektor E, karena vektor E sebanding dengan dt
dφ .
Sedangkan untuk dua buah generator sinkron yang bekerja secara paralel, diagram vektor dari fluks magnetik, tegangan, arus dan dayanya, digambarkan sebagai berikut:
Gambar 2.5 Diagram vektor dua buah generator sinkron yang bekerja paralel
I1 + I2 E2’ Φ2’ Φ2 E1 Φ1 E2 V1 = V2 MW2’ MW1 MW2 MVAR1 I2’ MVAR2 I2
Apabila kopel penggerak salah satu generator pada gambar 2.2 diperbesar, maka rotor (kutub) generator akan bergerak maju dalam arti bahwa vektor Φ akan bergerak ke arah yang memperbesar komponen daya aktif MW dari generator, misalkan hal ini dilakukan terhadap generator nomor 2, maka keadaan akan berubah seperti ditunjukkan oleh vektor Φ2’, E2’ dan I2’. Selanjutnya komponen
daya aktif generator 2 akan berubah dari MW2 menjadi MW2’. Penambahan kopel
penggerak generator memerlukan tambahan bahan bakar pada unit thermis dan pada unit hydro memerlukan penambahan air. Oleh karenanya produksi MWH dari unit-unit pembangkit listrik memerlukan bahan bakar untuk unit thermis dan memerlukan sejumlah air untuk unit hydro. Sedangkan untuk daya reaktif (VAR) tidak akan terpengaruh denggan penambahan kopel penggerak ini, karena komponen daya reaktif di pengaruhi oleh perubahan pada komponen penguat medan magnetnya.
Menurut prinsip dasar dalam dinamika rotor, ada hubungan antara kopel mekanis penggerak generator dengan perputaran generator, yaitu :
(TG – TB) = M x
dt dω
(2.21)
dimana:
TG = kopel penggerak generator
TB = kopel beban yang membebani generator
M = momen inersia dari generator beserta mesin penggeraknya ω = kecepatan sudut perputaran generator
Sedangkan frekuensi yang dihasilkan generator merupakan sama dengan kecepatan rotornya atau dituliskan dengan:
f =
π ω
Hal ini berarti bahwa pengaturan frekuensi sistem merupakan pengaturan dari kopel penggerak generator atau pengaturan daya aktif dari generator. Pada mesin penggerak generator, untuk pengaturan frekuensi sistemnya di lakukan dengan pengaturan pemberian bahan bakar pada unit-unit pembangkit thermis dan pengaturan pemberian air pada unit-unit pembangkit hydro.
Sedangkan untuk sistem beban, frekuensi akan turun apabila daya aktif yang dibangkitkan tidak mencukupi kebutuhan beban dan sebaliknya frekuensi akan naik apabila ada kelebihan daya aktif dalam sistem. Secara mekanis, dengan melihat persamaan (2.21) dan (2.22) dinamika frekuensi sistem dalam kaitannya dengan pembangkitan daya aktif dapat dituliskan sebagai berikut:
a. Jika TG– TB = ΔT < 0, maka
dt dω
< 0, sehingga frekuensi akan turun. (2.23)
b. Jika TG – TB = ΔT > 0, maka
dt dω
> 0, sehingga frekuensi akan naik. (2.24)
Secara tidak langsung penyediaan daya reaktif dapat pula mempengaruhi frekuensi sistem, karena penyediaan daya reaktif mempunyai pengaruh besar terhadap kenaikan tegangan, yang selanjutnya dapat menyebabkan kenaikan beban daya aktif. Namun pengaturan frekuensi sistem lebih dominan kaitannya dengan penyediaan daya aktif.
BAB III
PRINSIP KERJA GOVERNOR DAN PENGATURAN
FREKUENSI SISTEM
3.1 UMUM
Pengaturan penyediaan daya aktif dilakukan dengan pengaturan besarnya kopel mekanis pada mesin penggerak yang diperlukan untuk memutar generator. Pengaturan kopel mekanis pada mesin penggerak dilakukan dengan cara:
a. Mengatur pemberian uap untuk penggerak turbin pada PLTU. b. Mengatur pemberian air untuk penggerak turbin pada PLTA.
c. Mengatur pemberian bahan bakar ke ruang bakar pada PLTG dan PLTD. Alat yang berfungsi untuk melakukan pengaturan seperti disebut diatas dinamakan governor dan untuk melakukan fungsinya tersebut, governor mengukur frekuensi yang dihasilkan generator dengan cara mengukur kecepatan putar poros generator tersebut, karena frekuensi yang dihasilkan sebanding dengan kecepatan putar poros generator. Oleh karena itu berdasarkan cara pengukuran frekuensinya, governor terdiri dari 2 jenis yaitu:
a. Governor Mekanis, kecepatan putar poros generator yang sebanding dengan frekuensi yang dihasilkan generator didapat dengan menggunakan bola-bola berputar yang menghasilkan gaya sentrifugal. Gaya sentrifugal ini kemudian dibandingkan dengan gaya mekanik yang didapat dari pegas referensi. Selisih besarnya gaya sentrifugal dengan gaya pegas ini menjadi sinyal penggerak sistem mekanik atau sistem hidrolik yang selanjutnya akan menambah uap, air atau bahan bakar untuk mesin penggeraknya.
b. Governor Elektronik, deteksi frekuensi dilakukan dengan menggunakan generator kecil yang mempunyai magnet permanent sehingga tegangan jepitnya sebanding dengan putarannya, generator ini dikopel secara mekanis dengan poros generator utamanya sehingga putarannya sebanding dengan putaran generator utama dan tegangan jepit generator kecil ini sebanding dengan frekuensi generator utama. Selanjutnya tegangan jepit generator kecil ini dibandingkan dengan tegangan referensi dimana selisihnya menjadi sinyal penggerak sistem elektronik, seperti halnya pada governor mekanik yang menggunakan hidrolik.
3.2 PRINSIP KERJA GOVERNOR
Pada saat governor bekerja untuk memperbaiki frekuensi sistem, masih terjadi osilasi (keadaan tidak stabil) dari governor itu sendiri, sehingga diperlukan sistem pengaturan lain untuk menghentikan kerja governor tersebut dan pengaturan kerja governor ini dilakukan dengan 2 cara, yaitu:
a. Pengaturan Primer, yaitu pengaturan awal dimana governor langsung merespon perubahan frekuensi yang terjadi secara otomatis tanpa intervensi pengaturan lainnya atau tidak menghasilkan speed droop, namun pada pengaturan ini frekuensi masih akan berosilasi untuk mencapai titik stabilnya dan pengaturan ini membuat governor bersifat astatis.
b. Pengaturan Sekunder, pengaturan ini sebenarnya hanya sebagai umpan balik bagi governor dari pengaturan primer untuk menghentikan kerja governor tersebut. Pada pengaturan ini akan menimbulkan speed droop sehingga governor mencapai kestabilannya dan dilakukan manual oleh operator atau komputer.
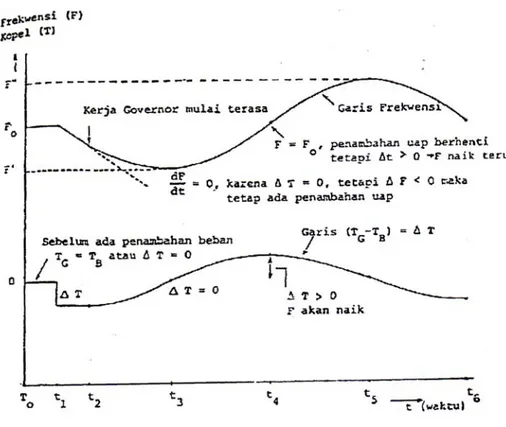
Gambar 3.1 Karakteristik respon governor terhadap perubahan frekuensi yangbersifat statis.
Penurunan frekuensi di sistem akan di deteksi oleh governor, yang kemudian governor akan mulai melakukan kerjanya, hal tersebut dapat dilihat pada gambar 3.1. Pada saat sistem kehilangan beban aktif secara mendadak karena terjadinya gangguan pada salah satu unit pembangkit yang beroperasi, maka frekuensi sistem
(
akan mengalami penurunan sehingga menjadi , di sini governor akan merespon perubahan frekuensi tersebut dan melakukan pengaturan primer dengan tetap memberikan penambahan uap ke turbin karena , namun hal tersebut belum mempengaruhi nilai kopel penggeraknya atau . Karena penambahan uap tersebut terus terjadi, maka akan ada penambahan kopel penggeraknya, sehingga dan frekuensi sistem akan kembali naik menuju nilai nominalnya , penambahan uap oleh governor akan terhenti pada saat , namun karena maka frekuensi akan terus naik hingga mencapai)
0 f f ' 0 < Δf 0 = ΔT 0 > ΔT( )
f0 0 ' f f = ΔT >0nilai , sehingga frekuensi masih akan terus berosilasi (tidak stabil), dalam hal ini di sebut governor bersifat astatis. Apabila pada saat t = t0 ada penambahan
beban, maka frekuensi akan turun dari nilai f0 menjadi f’. Penurunan frekuensi ini
disebabkan karena nilai TB pada persamaan (2.21) menjadi lebih besar sebagai
akibat penambahan beban, sehingga TG – TB = ΔT < 0 dan selanjutnya
mengakibatkan " f 0 < dt dω . dt dω
adalah percepatan sudut, apabila nilainya < 0 maka
berarti terjadi pengurangan kecepatan sudut ω dan karena frekwensi (f) =
π ω
2 , maka hal ini juga berarti penurunan frekuensi.
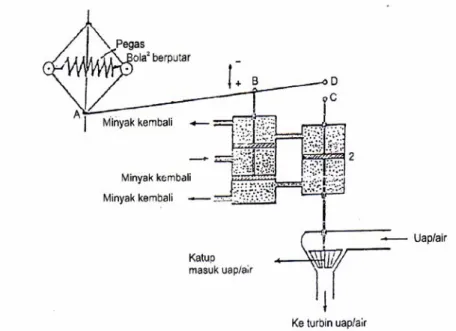
Gambar 3.2 Skema dan prinsip kerja governor.
Penurunan frekuensi dari nilai f0 menjadi f‘ dirasakan oleh governor dan
kemudian governor akan bereaksi untuk mengembalikan nilai frekuensi kembali normal ke f0, reaksi ini berlangsung sebagai berikut:
a. Karena kecepatan sudut ω dari mesin penggerak generator turun maka bola-bola berputar (gambar 3.1) juga akan turun kecepatan sudutnya karena poros
yang memutarnya dihubungkan langsung melalui sistem roda gigi dengan mesin penggerak generator. Hal ini akan menyebabkan titik A menurun, yang selanjutnya juga akan menurunkan titik B. Dengan turunnya titik B maka torak pengarah tekanan minyak akan mengalirkan minyak bertekanan ke torak penggerak katup utama, sehingga katup utama terangkat ke atas untuk menambah uap ke turbin uap dalam hal mesin penggerak adalah turbin uap dan dalam mesin penggerak turbin air maka katup utama akan menambah air ke turbin air. Untuk mesin diesel dan turbin gas maka yang digerakkan adalah batang pengatur bahan bakar.
b. Pada gambar 3.1 peristiwa penambahan beban terjadi pada saat t = t1dan hal
ini menyebabkan frekuensi turun. Pada saat t = t2 kerja governor telah mulai
terasa dan kecuraman penurunan frekuensi mulai berkurang sampai pada saat
t = t3 kecuraman penurunan frekuensi telah hilang atau secara mekanis
dikatakan
dt df
= 0, maka dengan mengingat persamaan (2.21) dan persamaan
(2.22) hal ini berarti bahwa jika
dt df
= 0, ΔT = TG – TB juga mempunyai nilai
nol.
c. Pada saat t = t3 nilai frekwensi f = f’ dimana f‘≠ f0. hal ini menyebabkan
generator akan terus menambah masukan uap dengan jalan mengangkat katup utama dari turbin. Keterangannya adalah sama dengan pada butir a. Hal ini berarti bahwa kopel yang dihasilkan mesin penggerak generator terus diperbesar sehingga ΔT = TG – TB menjadi sama dengan nol dan
mengakibatkan
dt df
> 0, yang berarti bahwa frekuensi naik.
sebagai akibat penambahan uap yang berlangsung sejak saat t = t3, seperti
tersebut pada butir c. Nilai ΔT > 0 ini menyebabkan frekuensi terus naik. Beberapa saat setelah t = t4 nilai frekwensi f > f0, sehingga governor mulai
bereaksi untuk menurunkan frekuensi dengan jalan mengurangi uap ke turbin sehingga nilai ΔT diperkecil dan hal ini juga akan memperkecil nilai
dt df
sesuai dengan persamaan (2.21) dan (2.22).
e. Pada saat t = t5 nilai frekuensi f’ = f” dimana f” > f0 sehingga governor terus
bereaksi untuk menurunkan frekuensi. Pada saat t = t5, nilai ΔT = TG – TB
sehingga dari segi keseimbangan kopel generator dengan kopel beban sebetulnya tidak diperlukan lagi pengurangan nilai kopel generator TG yang
dilakukan oleh governor dengan jalan mengurangi masukan uap ke turbin. Seperti diuaraikan dalam butir d. Tetapi karena pada saat t = t5 nilai frekwensi
f” > f0 maka governor akan terus bereaksi untuk mengurangi masukan uap ke
turbin.
f. Pada saat t = t6 keadaan adalah serupa dengan pada saat t = t4 yaitu bahwa
nilai frekwensi f = f0 tetapi bedanya dengan pada saat t = t3 adalah bahwa
pada saat t = t6 nilai ΔT < 0 sehingga frekuensi setelah saat t = t6 akan
menurun. Dengan uraian yang serupa ditelaah keadaan sesudah t = t6,
sesungguhnya merupakan keadaan periodik.
Pada uraian diatas, dapat dilihat bahwa ternyata governor tidak bisa mencapai nilai frekuensi normal f0 secara stabil, melainkan akan berosilasi
disekitar nilai f0 dan ini dikatakan bahwa governor bersifat astatis. Untuk bisa
membuat governor bersifat stabil maka titik C dan D dalam gambar 3.2 perlu dihubungkan, sehingga jika uap yang masuk ke turbin bertambah karena naiknya katup utama, maka akan menyebabkan titik C, D dan B akan naik. Naiknya titik B
ini dipercepat oleh naiknya titik C dan D disamping itu titik B juga kan dinaikkan oleh titik A yang bersamaan dengan naiknya frekuensi. Hal ini mengakibatkan titik B akan lebih cepat menutup pengiriman tekanan minyak yang mengangkat katup utama uap masuk. Ini berarti bahwa penambahan kopel pada mesin penggerak utama generator (penambahan TG) akan lebih cepat berhenti. Apabila
berhentinya penambahan uap ini kemudian diikuti dengan berhentinya gerakan titik A, maka governor akan berhenti bekerja seperti diuraikan dalam butir 1, titik A mula-mula bergerak turun sebagai akibat turunnya frekuensi dan gerakan titik A ini merupakan permulaan dari respon governor. Berhentinya gerakan titik A terjadi apabila ΔT = TG – TB= 0,sehingga menurut persamaan (2.21) nilai
dt
dω
= 0.
Titik A akan bergerak apabila nilai ω berubah atau apabila
dt dω ≠ 0 dan akan berhenti apabila dt dω = 0. Apabila dt dω
belum mencapai nilai nol, maka titik A
akan bergerak lagi turun dan proses penambahan uap dengan uraian seperti dijelaskan diatas, akan berlangsung lagi tetapi selalu diiukti dengan naiknya titik C dan D yang akan memberhentikan proses penambahan uap ini. Jadi proses penambahan uap akan berlangsung secara bertahap sampai pada suatu langkah
tertentu dimana nilai
dt
dω
menjadi nol dan governor berhenti bekerja. Dengan
demikian governor bekerja stabil walaupun nilai
dt
dω
= 0 dan terjadi pada
frekuensi f’ < f0. Karakteristik respon governor yang stabil tersebut dapat digambarkan dengan grafik pada gambar 3.3.
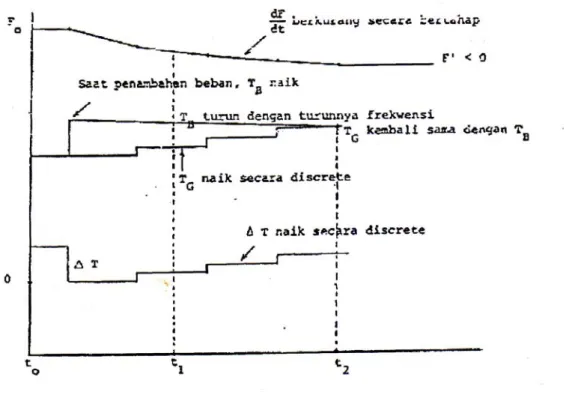
Gambar 3.3 Karakteristik respon governor yang stabil.
Penambahan uap secara bertahap akan menyebabkan nilai TG naik secara
discrete dan juga ΔT = TG – TB naik secara discrete seperti terlihat pada gambar
3.3. pada governor yang astatis kenaikan ΔT ini berlangsung secara terus-menerus dan sifatnya terlampau cepat, sehingga menimbulkan osilasi seperti terlihat pada gambar 3.1. dengan penambahan ΔT secara discrete, governor menjadi stabil walaupun pada frekuensi f’ < f0 seperti terlihat pada gambar 3.3.
Kestabilan ini tercapai karena dengan naiknya nilai ΔT secara discrete maka akan tercapai keseimbangan TG = TB tanpa terjadinya keadaan dimana
. Nilai ΔT yang sejak ada penambahan beban menjadi lebih kecil dari nol karena TB menjadi lebih besar dari TG akan naik secara discrete hingga mencapai
nilai nol tanpa memasuki kondisi ΔT > 0. Jika sempat mencapai nilai ΔT > 0
maka akan terjadi osilasi. Terjadinya keseimbangan ini juga dibantu oleh karakteristik beban sistem yang akan turun apabila frekuensi sistem menurun. Hal
0
> ΔT
ini juga digambarkan dalam gambar 3.3. keseimbangan baru tercapai pada frekuensi f’ < 0 dan selisih f0 – f’ disebut speed droop dari governor.
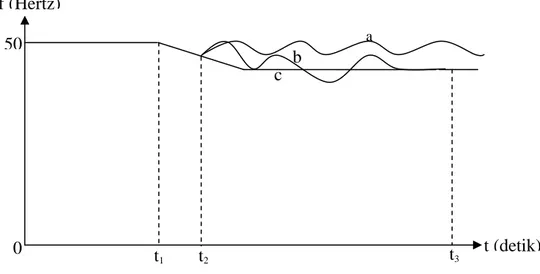
Pada gambar 3.1 dan 3.3 menggambarkan suatu keadaan yang ekstrim dari karakteristik governor yaitu keadaan yang tidak stabil, terus menerus berosilasi dan keadaan yang langsung stabil tanpa osilasi, namun dalam prakteknya bisa saja terjadi keadaan diantara kedua keadaan ekstrim tersebut, yaitu terjadinya osilasi yang teredam dan akhirnya tercapai keadaan yang stabil, seperti ditunjukkan oleh gambar 3.4.
f (Hertz)
a
b 50
Gambar 3.4 Berbagai respon dari governor terhadap perubahan beban.
Gambar 3.4 menjelaskan pada saat t = t1 ada penambahan beban, yang
mengakibatkan frekuensi sistem turun, dan pada saat t = t2 governor mulai
memberi respon, respon dari governor ini bisa menjadi beberapa keadaan yang digambarkan oleh garis-garis lengkung, yaitu:
a. Garis a, menggambarkan respon yang tidak stabil dan berosilasi. b. Garis c, menggambarkan respon yang langsung stabil.
c. Garis b, menggambarkan resppon yang berosilasi dan teredam kemudian pada t (detik)
0 t1 t2 t3
S1 Speed Droop S1= 4%
S2 Speed Droop S2 > S1 Cepat atau lambatnya osilasi teredam ini tergantung kepada speed droop governor dan juga dash pot time dari governor. Jika titik C dan titik D pada gambar 3.2 dihubungkan, maka akan bisa mencapai keseimbangan baru. namun keseimbangan baru ini terjadi pada frekuensi yang lebih rendah dari frekwensi semula f0 (f’ < f0). untuk mempertahankan atau mengembalikan frekuensi pada
nilai f0 maka titik B perlu ditekan ke bawah.
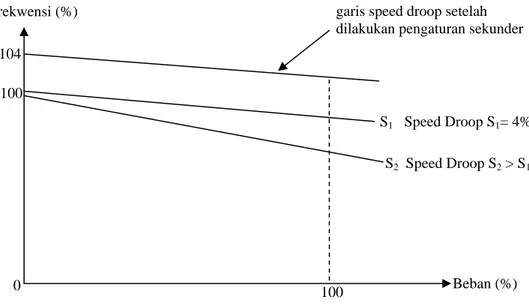
' f frekwensi (%) 104 100 0 100 Beban (%)
garis speed droop setelah dilakukan pengaturan sekunder
Gambar 3.5 Karakteristik speed droop governor.
Sifat governor yang dapat stabil tetapi tidak dapat mengembalikan nilai frekuensi ke nilai frekuensi semula disebut bahwa governor mempunyai speed droop. Gambar 3.5 menggambarkan karakteristik speed droop dari governor. Apabila pada beban penuh (100%) dikehendaki frekuensi = 100% maka untuk frekuensi pada beban nol harus = 104%, hal ini dikatakan bahwa governor mempunyai speed droop = 4%. Speed droop sesungguhnya merupakan hasil umpan balik dari gerakan mekanis pada saat penambahan uap yaitu dengan bergeraknya titik C dan D keatas yang kemudian juga mengangkat titik B keatas dan akhirnya menutup aliran tekanan minyak yang mengangkat penghisap titik C.
3.3 PENYETELAN SPEED DROOP
Speed Droop merupakan salah satu karakteristik governor yang perlu diperhatikan dalam pengaturan frekuensi sistem, karena merupakan pengaturan sekunder untuk mengembalikan atau menjaga frekuensi keluaran generator menjadi frekuensi f0
atau sama dengan frekuensi sistem.
Gamabar 3.6 Sistem mekanis dan sistem hidrolik pada governor.
Dengan memperhatikan gambar 3.6, terlihat bahwa makin dekat jarak titik B dengan titik D maka akan semakion cepat pengisap titik B meutup aliran
makin jauh jaraknya maka akan semakin lambat gerakan menutup aliran minyak. Hal ini berarti bahwa makin dekat jarak titik B dengan titik D maka akan semakin cepat governor menghentikan tanggapan atau responnya terhadap perubahan frekuensi, governor bersifat “malas” dan menghasilkan speed droop yang besar.
Dengan keterangan yang serupa, apabila jarak titik B dengan titik D semakin jauh, maka akan terlihat bahwa governor bersifat “rajin” dan menghasilkan speed droop yang kecil. Jadi penyetelan speed droop governor dapat dilakukan dengan menyetel jarak titik B dan titik D. dalam prakteknya hal ini tidak mudah untuk dilakukan, karena dilain pihak titik B juga harus dapat digerakkan keatas dan kebawah secara bebas untuk melakukan pengaturan sekunder. Hal ini dapat dilakukan dengan kombinasi sistem mekanik dan sistem hidrolik.
Titik B pada gambar 3.2 dipecah menjadi titk B1 dan titik B2 seperti terlihat pada gambar 3.6 titik B yang bertugas mengarahkan tekanan minyak dapat digerakkan melalui titik A oleh bola – bola berputar dan dapat pula digerakkan melauli titik B2 oleh motor pengaturan putaran. Sedangkan gerakan umpan balik dari titik D untuk memberhentikan tekanan minyak diterima melalui titik B1.
Besarnya umpan balik ini dapat diatur dengan mengatur posisi engsel E, jadi speed droop dari governor dapat diatur dengan mengatur posisi engsel E. Umpan balik dari titik D diterima titik B1 melalui engsel E dan akan menggerakkan rumah dari torak yang digerakkan titik B untuk menutup lubang minyak yang menuju ke rumah torak penggerak titik D.
Motor pengatur putaran dapat merubah – rubah posisi titik B melalui titik B2 dengan jalan memutar roda gigi cacing. Dalam keadaan generator belum paralel dengan sistem, motor pengatur putaran akan mengatur jumlah putaran per
menit (rpm) dari turbin, tetapi kalau generator sudah paralel dengan sistem maka melalui motor pengatur putaran dilakukan pengaturan daya nyata yang dibandingkan dengan set point (MegaWatt/MW), yang sesungguhnya juga berarti mengatur putaran rotor turbin yang di kopel dengan generator sehingga juga merupakan pengaturan frekuensi.
Speed drop sesungguhnya merupakan hasil umpan balik dari gerakan penambahan uap atau air, yaitu dengan bergeraknya titik C dan D ke atas yang selanjutnya melalui engsel E pada gambar 3.6, menekan rumah penghisap kiri ke bawah sehingga menutup lubang – lubang yang meneruskan tekanan minyak ke penghisap kanan dan akhirnya menghentikan proses penambahan uap atau air.
Makin kecil speed drop dari governor maka akan semakin peka governor tersebut terhadap perubahan beban, tetapi juga lebih besar kemungkinannya untuk tidak stabil.
Kerja governor dalam parakteknya tidaklah sesederhana seperti yang tergambar pada gambar 3.2, tetapi dilengkapi pula dengan rangkaian peredam
(dashpot) untuk menghindari osilasi dan menggunakan penguatan bertingkat
seperti terlihat pada gambar 3.9, yaitu governor merk woodwaard.. juga perlu ada katup darurat seperti terlihat pada gambar 3.8 untuk dapat memberhentikan unit pembangkit dalam keadaan darurat dengan menutup katup uap pada turbin atau katup air pada turbin air, sedangkan pada turbin gas dan mesin Diesel akn menutup saluran bahan bakar.
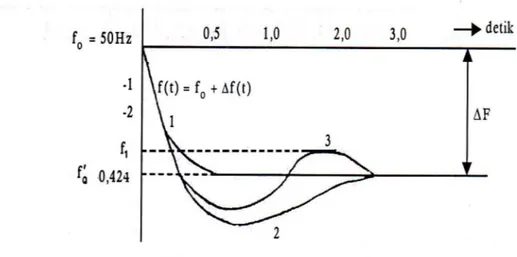
Gambar 3.7 Proses pengaturan frekuensi sebagai fungsi waktu
Pada gambar 3.7 memperlihatkan perubahan frekuensi sebagai fungsi waktu, yaitu pada saat t = t0 ada penambahan beban sehingga frekuensi sistem
yang pada saat itu sebesar 50 Hz akan turun menurut garis 1 atau apabila momen inersia sistem lebih kecil, maka penurunan frekuensi akan lebih cepat, seperti pada garis 2. Sedangkan pada saat t = t1atau pada saat 0,5 detik, governor mulai terasa
kerjanya, dan kondisi penurunan frekuensi seperti yang ditunjukkan garis 1 dan garis 2 akan berubah menjadi kondisi atau nilai frekuensi yang baru dan terus naik, di tunjukkan menurut garis 3, karena governor terus melakukan pengaturan primernya, maka pada t = t2 atau 1,0 detik, akan tercapai frekuensi f1. Kemudian
pada saat t = t3 dilakukan pengaturan sekunder sehingga frekuensi, f1, kembali
turun menuju kestabilan baru frekuensi, yaitu menjadi . Besarnya Δf ini tergantung kepada penyetelan speed droop dari governor.
' 0 f
3.4 PERHITUNGAN PENURUNAN FREKUENSI SISTEM KARENA GANGGUAN UNIT PEMBANGKIT
Penambahan beban secara mendadak mempunyai dampak menurunkan frekuensi sistem, begitu pula sebaliknya apabila terdapat unit pembangkit yang terganggu dan trip (jatuh dan keluar) dari sistem, dampaknya juga menurunkan frekuensi.
Pada sub bab ini akan dijelaskan bagaimana menghitung penurunan frekuensi yang terjadi dalam sistem, sebagai akibat gangguan unit pembangkit yang mengalami trip dari sistem tanpa memperhitungkan respons governor. Respons dari governor tidak diperhitungkan agar didapat hasil perhitungan yang lebih “aman”, karena perhitungan penurunan frekuensi ini dimaksudkan untuk merencanakan pelepasan beban dengan menggunakan Under Frequency Relay (UFR) untuk menghindarkan gangguan semi total atau bahkan gangguan total
(black-out) dalam sistem, yang disebabkan terlalu banyak unit pembangkit yang
ikut trip karena menjadi kelebihan beban.
Sebelum ada unit pembangkit yang trip karena mengalami gangguan, keadaan adalah seimbang, artinya daya yang dibangkitkan dalam sistem PG sama
dengan beban PB (PG = PB). Jika unit pembangkit yang sebelum mengalami
gangguan membangkitkan daya sebesar PS ke dalam sistem, maka pada saat unit
ini trip dalam sistem terjadi kekurangan daya yang dibangkitkan sebesar PS.
Kekurangan daya inilah yang menyebabkan frekuensi turun, karena kekurangan daya menyebabkan kopel yang dihasilkan generator – generator dalam sistem (TG)
menjadi lebih kecil daripada kopel beban (TB), dan sesuai menurut persamaan
2.23, dimana jika ΔT=TG – TB < 0 maka frekuensi akan turun.
Nilai ΔT < 0 ini menyebabkan terjadinya percepatan negatif atas kecepatan sudut rotor generator, karena
ΔT = I dt dω
(3.1)
dimana;
H = nilai momen inersia bagian - bagian yang berputar dalam sistem.
Persamaan 3.1 dapat pula dinyatakan dengan frekuensi melalui persamaan
f π ω =2 , sehingga didapat: ΔT = I dt df π 2 (3.2) dimana: ΔF0 = frekuensi sistem
PGO = besarnya daya yang dibangkitkan dalam sistem sebelum ada ganggua
unit pembangkit
To = saat terjadinya gangguan unit pembangkit.
PBO = beban sistem sebelum gangguan.
PSO = besarnya selisih daya antara yang di bangkitkan dengan beban setelah
ada gangguan, dalam hal ini = sebesarnya daya yang dibangkitkan oleh unit yang terganggu.
maka,
TG - ωo = PO (3.3) ΔTωo = ( PO – PSO ) – PSO = -PSO (3.4) PSO = PBO
Karena sebelum terjadinya gangguan, daya yang dibangkitkan adalah sama dengan daya beban. Tanda negatif menunjukkan adanya kekurangan daya yang dibangkitkan.
Dari persamaan (3.3) dan (3.4) akan menghasilkan: O SO P ω − = I dt df π 2 , (3.5) -PSO = dt df I2πϖO , (3.6)
karenaωO = 2πfO selanjutnya didapat:
-PSO = 2πI. 2πfO dt df = dt df I fO 2 4π (3.7)
Seperti pada pembahasan sebelumnya, telah dijelaskan bahwa besaran yang menyangkut energi mekanik dinyatakan dengan H, yaitu besarnya energi mekanik per MW terpasang dan dijelaskan dengan persamaan:
2 2 / 1 ω = H I=1/2
(
2πf0)
2I=2π2f02I (3.8) Sedangkan untuk energi mekanik dalam sistem dinyatakan:sistem me me sistem S S H H sin sin = (3.9)
sehingga untuk menghitung penurunan frekuensi yang terjadi didapat:
SO P H f dt df Δ − = 2 0 (3.10) dimana:
ΔH adalah selisih antara Hsistemdengan Hmesin.
Dari persamaan 3.10 dapat dihitung nilai
dt df
untuk nilai PSO tertentu,
sesaat setelah gangguan terjadi. Tanda negatif menunjukkan terjadinya penurunan frekuensi system akibat terjadinya gangguan unit pembangkit yang sebelumnya menyumbangkan daya ke sistem sebesar PSO.
H seperti yang telah ditulis diatas merupakan energi kinetik dalam sistem dibagi daya terpasang dalam sistem dan dinyatakan dalam MW, untuk keperluan
menghitung
dt df
yang dinyatakan dalam persamaan diatas. Energi kinetik maupun
daya terpasang yang dipakai untuk menghitung nilai H, haruslah dari sistem tanpa besaran unit yang terganggu dan di tulis dalam bentuk per unit (pu), maka nilai
PSO yang akan dinyatakan dalam per unit menjadi:
SOT GOT SO P P P − (3.11) dimana,
PGOT = daya terpasang sistem yang merupakan interkoneksi dari beberapa
unit-unit pembangkit dan dinyatakan dalam MW, yang beroperasi sebelum ada gangguan
PSOT = daya terpasang dalam MW dari unit yang mengalami gangguan.
Sehingga persamaan (3.10) menjadi:
H f dt df Δ − = 2 0 SOT GOT SO P P P − (3.12)
Keharusan menyatakan nilai PSO dalam per unit kalau nilai H dinyatakan
dalam per unit, dimaksudkan agar dimensi ruas kiri dan dimensi ruas kanan pada persamaan (3.12) menjadi sama, yaitu Hertz/detik. Sedangkan tanda negatif hanya merupakan indikasi terjadinya penurunan frekuensi.
Karena persamaan (3.12) diturunkan melalui persamaan (3.4) yang mengubah besaran kopel ΔT menjadi daya listrik melalui hubungan ΔTωo = -PSO
atau ΔT2πfO = -PS0. Maka dalam melakukan perhitungan - perhitungan diatas
harus di ingat pula bahwa:
a. Nilai frekuensi turun dengan kecepatan
dt df
sejak mulai terjadinya gangguan
yaitu sejak t0, berarti pada saat-saat setelah terjadi gangguan nilai frekuensi
sudah lebih kecil dari daripada f0, sehingga nilai dt df
juga turun.
b. Dengan turunnya nilai frekuensi maka governor akan bereaksi seperti telah diuraikan dalam sub bab sebelumnya dan akan melakukan pengaturan primer untuk memperkecil nilai ΔT.
c. Dengan turunnya nilai frekuensi, besarnya beban juga akan turun, dimana untuk perubahan frekuensi sebesar Δf akan terjadi perubahan beban sebesar ΔPB=DΔf, dalam hal ini
f P
D B
∂ ∂
= adalah sebuah faktor yang menggambarkan besarnya perubahan beban yang terjadi dalam sistem akibat terjadinya perubahan frekuensi.
Untuk menyederhanakan perhitungan, yaitu menghitung bagaimana frekuensi menurun sebagai fungsi waktu, dilakukan langkah – langkah sebagai berikut:
a. Diambil selang – selang waktu yang cukup kecil,. Misalnya 1 detik, dalam
selang waktu ini nilai
dt df
dianggap konstan. Makin kecil selang waktu yang
diambil, maka akan semakin teliti nilai perhitungan yang didapat. Permulaan selang waktu pertama yaitu pada saat t0 sampai t1 adalah merupakan
permulaan awal perhitungan, yaitu dengan mencari besarnya nilai laju penurunan frekuensi per satuan waktu dengan menggunakan persamaan 3.12,
Tanda negatif pada ruas kanan hanya merupakan indikasi terjadinya penurunan frekuensi.
b. Pada akhir selang waktu yang pertama yaitu pada saat t1, nilai frekuensinya
adalah: ) .( ) ( 0 1 1 0 0 1 t t dt df F F = + − − (3.1.3) dimana: Nilai ( )0−1 dt df = nilai dt df
dalam selang waktu antara t0 dan t1.
Nilai (t1-t2) = lamanya waktu yang akan diambil dalam satuan detik.
c. Untuk selang waktu berikutnya yaitu antara t1 dan t2 harus dilakukan
perhitungan untuk mencari nilai permulaan dari frekuensi, yaitu selisih antara frekuensi awal dengan besarnya dan selisih daya yang dibangkitkan dengan beban : 1 1 B SI P P P = − 1 0 0 ) (PG −PS −PB = (3.14) dimana:
P1 = daya yang dibangkitkan pada saat t1 yang dalam hal ini dianggap sama
dengan P0 – PS0 karena dalam perhitungan ini diasumsikan bahwa
generator belum bereaksi untuk menambah daya.
Ada cara lain untuk menentukan PB1, jika nilai dari faktor perubahan beban
terhadap perubahan frekuensi (D) dianggap linier maka nilai PB1 akan
menjadi 0 0 1 1 B B P f f P = (3.15)
Dengan cara serupa seperti kita menghitung nilai ( )0−1 dt df , maka : T S T G B S G P P P P P H f dt df 0 0 1 0 0 1 2 1 ) ( . 2 ) ( − − − Δ = − (3.16)
Persamaan 3.16 sifatnya lebih umum daripada persamaan ΔPB = D Δf. Untuk
t = t0 nilai PB = PG sehingga kalau dimasukkan dalam persamaan 3.16 maka
persamaan 3.16 berubah menjadi persamaan 3.12 dimana f = f0 – f1 dan D
harus diketahui.
Begitu seterusnya dapat dilakukan perhitungan yang serupa untuk selang – selang waktu berikutnya.
DINAMIKA FREKUENSI SISTEM
4.1 SPESIFIKASI DATA
Setelah melakukan pengamatan gangguan terhadap unit pembangkit di PLTU Tanjung Jati B, maka pada tanggal 15 April 2007 pada pukul 10:38 WIB, telah di dapat data hasil pengukuran karena pada saat itu unit #2 PLTU Tanjung Jati B mengalami gangguan, maka data tersebut kemudian dianalisa dengan menggunakan formulasi yang telah dibahas pada bab tiga untuk mengetahui waktu laju penurunan frekuensi sistem yang terjadi akibat tripnya unit pembangkit tersebut. Pada saat itu unit #2 PLTU Tanjung Jati B mengalami gangguan hingga terjadi penurunan beban sekitar 60%, yaitu dari 715 MW ke 281 MW.
Dari hasil survey dan observasi di lapangan dapat diketahui spesifikasi data sebagai berikut:
a. Data Unit Pembangkit
Daya maksimum generator (PMAKS) = 715 MW
Daya pasok (PSO) = 660 MW
Cos Ф = 0,95
Kecepatan rotor (n) = 3000 rpm
Momen Inersia Mesin (Hmes) = 5
b. Data Sistem Interkoneksi JAMALI
Daya terpasang (PG0T) = 14194 MW
Daya terpakai (PS0T) = 13191 MW
Dalam menghitung faktor penurunan frekuensi akibat gangguan, dalam perhitungannya diperlukan beberapa parameter yang di ambil dari spesifikasi data. Dalam hal ini selain parameter harus ditetapkan juga besarnya interval waktu yang akan diambil, dalam analisis ini laju penurunan frekuensi di ambil per 1 detik, jadi
t0 = 0 s, t1 = 1s, t2 = 2s, dan begitu seterusnya.
Langkah pertama yang harus dilakukan adalah menentukan besarnya momen inersia dari sistem (Hsistem)
MW MJ S S H H sistem me me sistem 0,250 / 13191 660 . 5 sin sin = = =
Setelah diketahui Hsistem maka dapat diketahui penurunan frekuensi per
satuan waktu menurut persamaan (3.12) dengan PS0 = 660 MW, PG0T = 14194
MW, PS0T = 13191 MW, f0 = 50 Hz, dan ΔH = 4,75 660 14194 660 . ) 25 , 0 5 ( 2 50 1 0 − − − − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −t t dt df ) 0488 , 0 ( 263 , 5 − = x s Hz/ 2566 , 0 − =
tanda negatif diatas merupakan indikasi terjadinya penurunan frekuensi per 1 detik.
Nilai frekuensi akhir pada selang waktu t0 – t1, yaitu pada saat t1 adalah f1
sebagai berikut: Hz t t dt df f f t t 743 , 49 ) 1 . 2566 , 0 ( 50 ) .( 1 0 0 1 1 0 = − + = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = −
telah dikurangi dengan besarnya daya yang hilang dari unit yang mengalami gangguan. Hertz MW f P D B 50 13191 = ∂ ∂ =
karena nilai D diatas dianggap liniear, maka:
MW P f f PB B 13191 13123,198 50 743 , 49 0 0 1 1 = = =
Kemudian akan dihitung laju penurunan frekuensi pada saat t = t2 atau
pada detik ke-2 setelah terjadinya gangguan.
(
)
T S T G B S G t t P P P P P H f dt df 0 0 1 0 0 0 . 2 2 1 − − − Δ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − 660 14194 198 , 13123 ) 660 13191 ( . ) 25 , 0 5 ( 2 50 − − − − = = 5,263x(−0.0438) s Hz/ 230 , 0 − =Nilai frekuensi akhir pada selang waktu t1 – t2, yaitu pada saat t2 adalah f2
sebagai berikut: Hz t t dt df f f t t 513 , 49 ) 1 . 230 , 0 ( 743 , 49 ) .( 2 1 1 2 2 1 = − + = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = −
pada t2 beban terpakai atau PB2 akan mengalami penurunan pula sebesar:
MW P f f PB B 13191 13062,519 50 513 , 49 0 0 2 2 = = =
Selanjutnya akan dihitung laju penurunan frekuensi pada saat t = t3 atau
T S T G t t H P P dt 2 0 0 3 2 Δ − ⎠ ⎝ −
(
)
660 14194 519 , 13062 660 13191 . ) 25 , 0 5 ( 2 50 − − − − = ) 0392 . 0 ( 263 , 5 − = x s Hz/ 206 , 0 − =Nilai frekuensi akhir pada selang waktu t2 – t3, yaitu pada saat t3 adalah f3
sebagai berikut: Hz t t dt df f f t t 307 , 49 ) 1 . 206 , 0 ( 513 , 49 ) .( 3 2 2 3 3 2 = − + = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = −
pada waktu t3 beban terpakai atau PB3 akan mengalami penurunan pula sebesar:
MW P f f PB B 13191 13008,172 50 307 , 49 0 0 3 3 = = =
Kemudian akan dihitung laju penurunan frekuensi pada saat t = t4 atau
pada detik ke-4 setelah terjadinya gangguan.
(
)
T S T G B S G t t P P P P P H f dt df 0 0 3 0 0 0 . 2 4 3 − − − Δ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −(
)
660 14194 172 , 13008 660 13191 . ) 25 , 0 5 ( 2 50 − − − − = ) 0352 , 0 ( 263 , 5 − = x s Hz/ 185 , 0 − =Nilai frekuensi akhir pada selang waktu t3 – t4, yaitu pada saat t4adalah f4
sebagai berikut: Hz t t dt df f f t t 122 , 49 ) 1 . 185 , 0 ( 307 , 49 ) .( 4 3 3 4 4 3 = − + = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = −
MW P f f PB B 13191 12959,366 50 122 , 49 0 0 4 4 = = =
Selanjutnya akan dihitung laju penurunan frekuensi pada saat t = t5 atau
pada detik ke-5 setelah terjadinya gangguan.
(
)
T S T G B S G t t P P P P P H f dt df 0 0 4 0 0 0 . 2 5 4 − − − Δ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −(
)
660 14194 366 , 12959 660 13191 . ) 25 , 0 5 ( 2 50 − − − − = ) 0316 , 0 ( 263 , 5 − = x s Hz/ 166 , 0 − =Nilai frekuensi akhir pada selang waktu t4 – t5, yaitu pada saat t5 adalah f5
sebagai berikut: Hz t t dt df f f t t 956 , 48 ) 1 . 166 , 0 ( 122 , 49 ) .( 5 4 4 5 5 4 = − + = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = −
Dari hasil analisis menggunakan formulasi pada bab tiga, diketahui dalam waktu 4 detik terjadi penurunan frekuensi sistem dari 50 Hz ke 49,122 Hz atau sebesar 0,878 Hz dan untuk penurunan daya di sistem dari 13191 MW ke 12959,366 MW atau sebesar 231,634 MW. Sedangkan berdasarkan data pengamatan didapatkan dalam waktu 254 detik terjadi penurunan frekuensi dari 50,035 Hz ke 49,118 Hz atau sebesar 0,917 Hz dan untuk dayanya dari 13191 MW ke 13128 MW atau sebesar 63 MW.
Ketidaksesuaian data dari hasil perhitungan dengan data dari pengukuran menggunakan komputer terjadi karena data dari perhitungan mengabaikan respon dari governor. Juga karena disebabkan keterbatasan data yang ada, yaitu antara
inersia sesungguhnya dari sistem, kemudian juga besarnya nilai speed droop dari seluruh unit-unit pembangkit yang tergabung dalam sistem interkoneksi Jawa-Madura-Bali, juga besarnya daya beban real time di sistem pada saat sebelum, selama dan setelah terjadi gangguan.
Seperti telah dijelaskan pada bab tiga, perhitungan ini memang untuk mendapatkan kondisi perhitungan yang lebih “aman”, karena perhitungan penurunan frekuensi akibat salah satu unit pembangkit yang sedang beroperasi mengalami gangguan, dimaksudkan untuk merencanakan pelepasan beban dengan menggunakan Under Frequency Relay (UFR) untuk menghindarkan gangguan total (black out) dan semi total dalam sistem yang disebabkan terlalu banyak unit pembangkit yang ikut trip karena berbeban lebih.
BAB V
KESIMPULAN DAN SARAN
V.1 Kesimpulan
Suatu sistem tenaga listrik yang andal, jika mengalami gangguan di sistem maka laju penurunan frekuensi per satuan waktu haruslah selambat mungkin, bahkan harus dapat secepat mungkin dikembalikan ke nilai nominalnya, karena untuk menghindari kemungkinan sistem mengalami kegagalan total atau semi total akibat kelebihan beban dari unit- unit pembangkit. Keandalan dari sistem tergantung dari momen inersia (H) sistem, yaitu kemampuan dari sistem untuk menopang beban pemakaian dalam kondisi normal dan memiliki cadangan daya tersedia yang dapat memberikan cadangan daya jika salah satu unit pembangkit yang tergabung dalam sistem mengalami gangguan. Keandalan sistem juga tergantung dari besar-kecilnya forced-outage rate hours (FOR) pertahun dari unit - unit pembangkit yang beroperasi, yaitu suatu ukuran sering tidaknya suatu unit pembangkit mengalami gangguan, semakin kecil nilai FOR maka semakin tinggi jaminan daya yang tersedia dari suatu unit pembangkit.
Sedangkan kemampuan unit-unit pembangkit yang beroperasi dalam sistem untuk menjaga nilai frekuensi nominalnya atau mengembalikan nilai frekuensi ke nilai nominalnya jika terjadi gangguan, sangat tergantung dari respon governor dari unit - unit pembangkit yang beroperasi, Semakin bagus respon governornya, maka akan semakin kecil osilasi nilai frekuensi pada kondisi normal dan akan semakin lambat laju penurunan frekuensi pada saat terjadi gangguan di sistem dan dan juga dari pusat
pengatur beban, untuk mengatur aliran daya dari pusat – pusat pembangkit ke pusat-pusat beban dan unit - unit pembangkit mana saja yang harus beroperasi. Dari grafik frekuensi sebagai fungsi waktu terlihat bahwa frekuensi akan mengalami penurunan yang cukup curam akibat perubahan beban yang mendadak dan hasil respon dari governor tanpa ada pengaturan sekunder dalam sistem tenaga listrik dan dari grafik data pengukuran frekuensi akan kembali naik setelah ada pengaturan sekunder dalam sistem, walaupun selisih waktu laju penurunan frekuensi antara grafik hasil perhitungan dengan grafik hasil data pengukuran cukup jauh, namun telah di jelaskan pada akhir paragraph bab IV.
V.2 Saran
Gangguan dalam suatu sistem tenaga listrik memang tidak dapat dihindari namun suatu sistem tenaga listrik yang andal harus mampu bekerja pada semua kondisi agar kontinuitas dan mutu tenaga listrik yang disalurkan dapat terjamin, oleh karena itu sudah seharusnya pihak penyedia tenaga listrik, dalam hal ini PLN maupun pihak swasta untuk melakukan perawatan-perawatan preventif dari peralatan unit-unit pembangkitnya agar dapat bekerja optimal, dan untuk pihak pengatur pendistribusian tenaga listrik, PLN, untuk menyediakan suatu jaringan transmisi yang memiliki keandalan yang tinggi dan aliran daya yang seimbang.
[1] Anderson, P.M and Fouad, A.A, “Power System Stability”, The Iowa State University Press, Ames, Iowa, U.S.A, 1982
[2] Marsudi, D, “Operasi Sistem Tenaga Listrik”, Penerbit Graha Ilmu, Yogyakarta, 2006
[3] Zuhal, “Dasar Tenaga Listrik Dan Elektronika Daya”, Penerbit Gramedia, Jakarta, 1995