JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
PERANCANGAN SISTEM PERMESINAN PADA TRAILING
SUCTION DREDGER (TSD) SEBAGAI METODE PENGERUKAN
DI PELABUHAN
Alfan Fadhli, Ir. Agoes Santoso, Msc.M.Phil ,Ir. Amiadji M.M, M.Sc
Jurusan Teknik Sistem Perkapalan, Fakultas Teknologi Kelautan, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected], [email protected], [email protected] Abstrak ---Trailing Suction Dredger
(TSD) adalah salah satu jenis kapal keruk dari beberapa jenis kapal keruk yang ada. Sistem permesinan yang beroperasi pun lebih bervariatif karena selain kapal harus bergerak (moving) kapal juga melakukan aktivitasnya dalam melakukan pengerukan. Dalam operasinya, kapal keruk ini akan bekerja di perairan Pelabuhan Tanjung Emas Semarang. Dalam perancangan sistem permesinannya ada beberapa parameter yang perlu diperhatikan antara lain lokasi pengerukan, kapasitas produksi, kedalaman pengerukan, jenis material yang akan dikeruk, ukuran kapal, dan akses menuju ke tempat kerja. Dalam skripsi ini, akan dilakukan beberapa variasi perhitungan, analisa dan desain rencana umum kapal keruk (TSD). Perhitungan dan analisa yang dilakukan pada sistem permesinannya antara lain perhitungan kapasitas dan penentuan pompa hisap, perhitungan kapasitas dan penentuan towing winch suction pipe, perhitungan dan pemilihan mesin penggerak kapal keruk, serta desain kapal keruk yang direncanakan. Selanjutnya, setelah dilakukan perhitungan dan analisa tersebut, penentuan spesifikasi dijadikan dasar dalam pemilihan komponen / unit pada sistem permesinan kapal keruk TSD tersebut.
Kata kunci: Triling Suction Dredger, Sistem permesinan, Towing winch suction pipe, Pompa.
I. PENDAHULUAN
D
alam industri maritim peranan pengerukan (dredger) sangat penting untuk menjaga kedalaman lautan Indonesia agar memungkinkan untuk kapal-kapal besar bersandar.Selain untuk menjaga kedalaman perairan pelabuhan, lahan perairan baru yang dibuka untuk perluasan area pelabuhan menggunakan proses pengerukan. Pada umumnya, metode pengerukan trailing suction dredger merupakan metode pengerukan yg tepat untuk pembukaan lahan baru dengan skala besar. Trailing suction dredger adalah salah satu metode pengerukan mekanik yang banyak digunakan pengerukan ditempat perairan luas dengan metode pengerukan erosi atau aliran hisap yang bergerak bebas. Dalam prinsip kerjanya trailing suction dredger (TSD) dapat melakukan pengerukan (menghisap) pada media berupa tanah liad, lumpur dan kerikil dan dengan mudah bergerak pada perairan. Dalam pengoperasiannya tentu banyak sistem untuk mendukung proses pengerukan persebut agar bisa bekerja maksimal seperti pompa-pompa, instalasi perpipaan, towing winch, dan beberapa sistem pendukung lain.
II. URAIAN MATERI
A. Kapal Keruk Trailing Suction Dredger
Kapal keruk atau dredger ship adalah kapal yang memiliki peralatan khusus yang digunakan untuk proses pengerukan. Kapal ini digunakan berbagai macam kebutuhan di maritim antara lain yaitu kebutuhan di suatu pelabuhan, rute dari pelayaran, dan industri lepas pantai. Pada trailing suction dredger, hasil dari penggalian tersebut akan di hisap oleh pompa dan didistribusikan kedaratan ataupun bak (pontoon) untuk diproses lebih lanjut.Kapal keruk hisap (trailing suction
dredger) adalah kapal keruk stasioner
dilengkapi dengan perangkat head suction
yang kemudian dihisap oleh aliran pompa
JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
pengeruk. Selama operasi, Metode Trilling
Suction yaitu metode yang bekerja dengan
cara menyeret pipa penghisap ketika bekerja,
kemudian dihisap dengan slurry pump dan
kemudian disalurkan ke dalam kapal dan
ketika penampung sudah penuh trailling
suction hopper dradger berlayar menuju
lokasi pembuangan.
Karakteristik dari trailing suction dredger ship ini adalah sebuah kapal laut yang mempunyai system penggerak sendiri (self-propelled) yang dilengkapi dengan peralatan dan system equipment untuk melakukan proses pengerukan. Berikut ini adalah karakteristik kapal keruk :B.
Bidang Aplikasi.
Kapal keruk trailing suction dredger memiliki area aplikasi yang sangat luas sehingga disebut
pekerja keras pada industry pengerukan. Oleh karena itu, perlu adanya system pelabuhan untuk posisi kapal saat proses pengerukan agar tidak terkendala oleh kapal lain yang lewat / berlayar. Trailing suction dredger sangat cocok untuk menjaga dan memelihara kedalaman air terutama di daerah pelabuhan, namun sering juga diaplikasikan untuk reklamasi tanah. Kapal keruk ini dilengkapi dengan pompa hisap yang terhubung dengan pipa hisap dan digunakan untuk pengerukan bagian dasar laut.
C.
Prinsip Kerja
Ketika kapal keruk trailing suction dredger tiba di lokasi yang akan dikeruk maka kecepatan kapal akan berkurang menjadi sekitar 2 – 3 knot, kemudian pipa hisap diturunkan sampai posisi mulut hisap pipa (drug heads) beberapa meter di atas dasar laut, lalu pompa hisap dinyalakan sampai pipa hisap turun ke dasar laut dan pengerukan bisa dimulai. Banyaknya kedalaman material yang akan dikeruk ditunjukkan pada layar
monitor peta elektronik di kapal, selain itu pada layar monitor juga menunjukkan posisi, arah dan perjalanan kapal. Ketika pengerukan berhenti, pipa hisap dibersihkan dengan cara dipompa untuk mencegah pengendapan pasir atau kerikil pada pipa yang akan menjadi beban tambahan pada pengerek/towing winch.
D.
Kapasitas pompa yang digunakan
Dalam
perencanaan
ini
ditentukan
kapasitas produksi yaitu sebesar 2000 m
3/jam.
Adapun komposisi material yang terdapat pada perairan pelabuhan yang akan dihisap terdiri dari lumpur, kerikil, pasir dan air laut. Dimana prosentase penghisapan sebagai berikut:N o MATERIAL BERAT JENIS ton/m3 PROSEN TASE JUM-LAH (ton/ m3) 1 Lumpur 2,0 25 % 0,50 2 Kerikil 1,8 5 % 0,09 3 Pasir 1,4 10 % 0,14 4 Air laut 1,025 60 % 0,615 Jumlah 1,345
Head adalah energi mekanik yang terkandung dalam satu satuan berat zat cair yang mengalir. Secara umum head dirumuskan sebagai berikut:
Dimana:
P = Tekanan zat cair (Kgf/m)
v = rata-rata kecepatan aliran zat cair (m/s) γ = berat zat cair persatuan volume (kgf/m3) g = Percepatan gravitasi (m/s2)
z = Ketinggian (m)
Head total adalah gabungan antara static head (Hs), pressure head (Hp), velocity head (Hv) dan ditambah losses karena friction (Hf) pada suction dan discharge pump.
Ht = Hs + Hp + Hv + Hf
Head Statis (Hs), merupakan head karena
perbedaan ketinggian antara muka air pada sisi isap dan sisi keluar. Dirumuskan sebagai berikut: Hs = Z2 – Z1 , Dimana:
JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
Z1 = tinggi permukaan cairan pada posisi masuk= 10 m/s
Z2 = tinggi permukaan cairan pada posisi keluar
= 2 m/s Sehingga, Hs = Z2 – Z1
= 10 – (–2) = 12 m
Head Tekanan (Hp), adalah head yang
diperlukan untuk mengatasi suatu tekanan di dalam aliran fluida dari sistem pada suatu pompa. Dirumuskan sebagai berikut:
Dimana
P2 –P1= beda tekanan pada kedua permukaan sisi masuk dan keluar ρ = berat jenis cairan (kg/m3)
g = percepatan gravitasi (m/s2) maka
Hp = 0 (karena pelabuhan dalam keadaan alam terbuka, maka tekanan pada saat masuk dan keluar nilainya sama).
Head Kecepatan (Hv), merupakan head karena
perbedaan kecepatan pada sisi dischrage dan suction. Dirumuskan sebagai berikut:
𝑣 =𝑣22− 𝑣12
2 𝑔 Dimana:Dimana:
𝑣1 = kecepatan rata-rata pada posisi masuk (m/s)
= 3,5 m/s
𝑣2 = kecepatan rata-rata pada posisi keluar (m/s) = 4 m/s g = percepatan gravitasi (m/s2) = 9,8 m/s2 Maka : 𝐻𝑣 =𝑣22− 𝑣12 2 𝑔 𝐻𝑣 =42 𝑥 9,82−3,52 𝐻𝑣 = 0,277 𝑚/𝑠
Head Losses (Hf), Merupakan head yang
diperlukan untuk mengatasi kerugian-kerugian gesekan pada pipa (head loss minor) yang dirumuskan dengan HLminor = f x ( v
2
/ 2g ), serta head yang diperlukan untuk mengatasi kerugian karena panjang pipa (head loss major) yang dirumuskan sebagai
Head loss mayor total = 15,34 m Head loss minor total = 19,45 m Head loss total = 34,79 m
Head total = Hs + Hp + Hv + Hl = 12 + 0 + 0,277 + 34,79 = 48,069 m
Maka, dua data utama yang didapat yaitu: - Kapasitas pompa = 2000 m3/hr
- Head = 48,069 m
Berdasarkan dua data tersebut, maka didapatkan pemilihan pompa sebagai berikut
Nama pompa = Slurry Pump300ZJ-A70 Kapasitas = 635 -2333 m3/jam Head = 16 – 76,8 m
Daya maks = 630 kW
Kec. putaran = 490 – 980 rpm Max Ø partikel = 92 mm
E. Kapasitas Towing Winch yang digunakan
Sebelum menentukan kapasitas pengerek pipa hisap (winch), terlebih dahulu kita harus mengetahui berapa beban yang akan diangkat oleh winch tersebut. Berat pipa hisap pada kondisi kosong (JIS std.) Spesifikasi berat pipa hisap Ø300 mm
g P P Hp 1 2
g
P
P
Hp
1 2
g v D L Hmayor 2 2 JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
∑
τ
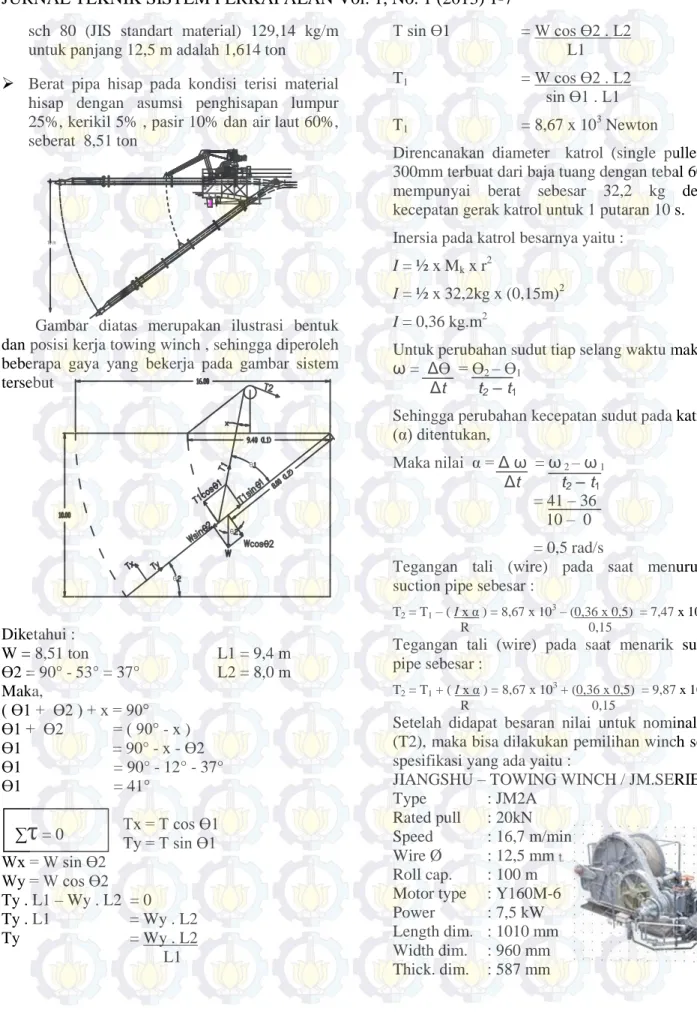
= 0sch 80 (JIS standart material) 129,14 kg/m untuk panjang 12,5 m adalah 1,614 ton
Berat pipa hisap pada kondisi terisi material hisap dengan asumsi penghisapan lumpur 25%, kerikil 5% , pasir 10% dan air laut 60%, seberat 8,51 ton
Gambar diatas merupakan ilustrasi bentuk dan posisi kerja towing winch , sehingga diperoleh beberapa gaya yang bekerja pada gambar sistem tersebut Diketahui : W = 8,51 ton L1 = 9,4 m Ɵ2 = 90° - 53° = 37° L2 = 8,0 m Maka, ( Ɵ1 + Ɵ2 ) + x = 90° Ɵ1 + Ɵ2 = ( 90° - x ) Ɵ1 = 90° - x - Ɵ2 Ɵ1 = 90° - 12° - 37° Ɵ1 = 41° Tx = T cos Ɵ1 Ty = T sin Ɵ1 Wx = W sin Ɵ2 Wy = W cos Ɵ2 Ty . L1 – Wy . L2 = 0 Ty . L1 = Wy . L2 Ty = Wy . L2 L1 T sin Ɵ1 = W cos Ɵ2 . L2 L1 T1 = W cos Ɵ2 . L2 sin Ɵ1 . L1 T1 = 8,67 x 10 3 Newton
Direncanakan diameter katrol (single pulley) Ø 300mm terbuat dari baja tuang dengan tebal 60mm mempunyai berat sebesar 32,2 kg dengan kecepatan gerak katrol untuk 1 putaran 10 s. Inersia pada katrol besarnya yaitu :
I = ½ x Mk x r 2
I = ½ x 32,2kg x (0,15m)2 I = 0,36 kg.m2
Untuk perubahan sudut tiap selang waktu maka : ω = ΔƟ = Ɵ2 – Ɵ1
Δt t2 – t1
Sehingga perubahan kecepatan sudut pada katrol (α) ditentukan, Maka nilai α = Δ ω = ω 2 – ω 1 Δt t2 – t1 = 41 – 36 10 – 0 = 0,5 rad/s
Tegangan tali (wire) pada saat menurunkan suction pipe sebesar :
T2 = T1 – ( I x α ) = 8,67 x 103 – (0,36 x 0,5) = 7,47 x 103 N
R 0,15
Tegangan tali (wire) pada saat menarik suction pipe sebesar :
T2 = T1 + ( I x α ) = 8,67 x 103 + (0,36 x 0,5) = 9,87 x 103 N
R 0,15
Setelah didapat besaran nilai untuk nominal pull (T2), maka bisa dilakukan pemilihan winch sesuai spesifikasi yang ada yaitu :
JIANGSHU – TOWING WINCH / JM.SERIES Type : JM2A
Rated pull : 20kN Speed : 16,7 m/min Wire Ø : 12,5 mm Roll cap. : 100 m Motor type : Y160M-6 Power : 7,5 kW Length dim. : 1010 mm Width dim. : 960 mm Thick. dim. : 587 mm
JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
Total weight : 480 kgF. Kebutuhan Tenaga Penggerak Kapal.
Pada tahap berikutnya yaitu melakukan perancangan desain kapal yang akan digunakan sebagai kapal keruk trailing suction. Setelah menentukan pompa dan winch untuk mengangkat suction pipe yang digunakan, maka ditentukan kapal yang akan digunakan sebagai sarana pengerukan dengan spesifikasi sebagai berikut ,LOA = 31,16 m Hull LOA = 22,60 m B = 7,70 m T = 1,00 m H = 2,15 m Vs (operation) = 3 knots/h V max (moving) = 8 knots/h
Dengan menggunakan software maxsurf, besar nilai tahanan pada lambung kapal bisa dianalisa dan ditampilkan pada software hull speed. Langkahnya yaitu dengan cara mendesain terlebih dahulu bentuk kapal beserta ukuran utama kapal yang disesuaikan pada hydromax yang juga bagian dari software maxsurf. Berikut adalah tampilan desain lambung kapal dengan menggunakan maxsurf :
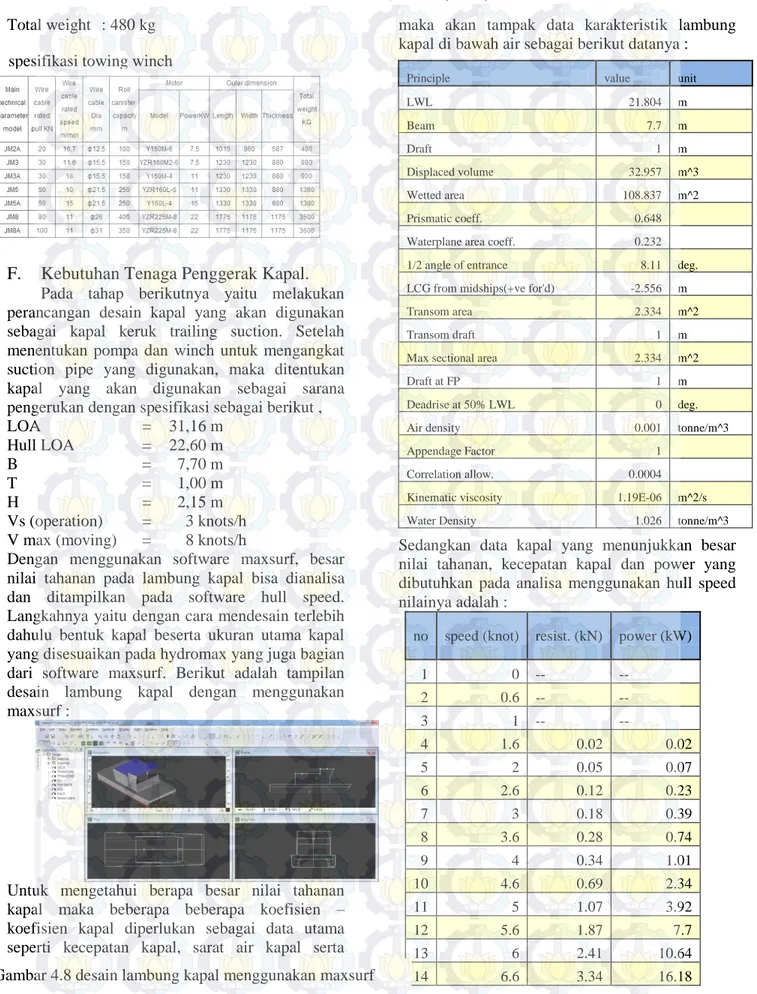
Untuk mengetahui berapa besar nilai tahanan kapal maka beberapa beberapa koefisien – koefisien kapal diperlukan sebagai data utama seperti kecepatan kapal, sarat air kapal serta ukuran utama kapal . setelah dilakukan analisa
maka akan tampak data karakteristik lambung kapal di bawah air sebagai berikut datanya :
Principle value unit
LWL 21.804 m Beam 7.7 m Draft 1 m Displaced volume 32.957 m^3 Wetted area 108.837 m^2 Prismatic coeff. 0.648 Waterplane area coeff. 0.232 1/2 angle of entrance 8.11 deg. LCG from midships(+ve for'd) -2.556 m Transom area 2.334 m^2
Transom draft 1 m
Max sectional area 2.334 m^2
Draft at FP 1 m
Deadrise at 50% LWL 0 deg. Air density 0.001 tonne/m^3
Appendage Factor 1
Correlation allow. 0.0004 Kinematic viscosity 1.19E-06 m^2/s Water Density 1.026 tonne/m^3 Sedangkan data kapal yang menunjukkan besar nilai tahanan, kecepatan kapal dan power yang dibutuhkan pada analisa menggunakan hull speed nilainya adalah :
no speed (knot) resist. (kN) power (kW)
1 0 -- -- 2 0.6 -- -- 3 1 -- -- 4 1.6 0.02 0.02 5 2 0.05 0.07 6 2.6 0.12 0.23 7 3 0.18 0.39 8 3.6 0.28 0.74 9 4 0.34 1.01 10 4.6 0.69 2.34 11 5 1.07 3.92 12 5.6 1.87 7.7 13 6 2.41 10.64 14 6.6 3.34 16.18
spesifikasi towing winch
JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
15 7 4.09 21.03
16 7.6 5.18 28.94
17 8 6.16 36.2
Dari hasil analisa diatas maka nilai tahanan total (RT)untuk menggerakkan kapal dengan kecepatan
8 knots/h adalah sebesar 6.16 kN dengan power atau daya efektif yang diperlukan (EHP) sebesar 36,2 kW. Untuk dapat mengetahui besar daya mesin yang akan digunakan maka harus dilakukan perhitungan koefisien propulsi diantaranya : - Koefisien lambung / ηhull
wake fractional,
w = 0,70 Cp – 0,3 + 0,3 (0,4 - a/b) = 0,34
trust deduction factor, t = 0,5 Cp – 0,9 = 0,24 ηhull = (1-t) / (1-w) = 1,16
- Efisiensi propeller / ηO, Merupakan efisiensi baling-baling pada kondisi perairan terbuka yang besar efisiensinya berdasar uji air terbuka berkisar antara 40%-70%, diambil 41%.
- Relative rotatif efficiency / ηrr, Adalah nilai kapal dengan jenis baling-baling sekrup tunggal dengan nilai diantara 1,02 – 1,05 dan direncanakan 1,02.
- Koefisien pendorong / PC, Adalah nilai koefisien yang diperoleh dari perkalian antara efisiensi lambung,efisiensi rotative relative dan efisiensi baling-baling, PC = ηhull x ηO x ηrr = 0,496
Jika nilai EHP (36,2 kW = 48,54 HP) dan koefisien propulsi kapal sudah diketahui, maka besar kapasitas mesin yang akan kita gunakan yaitu :
1. Delivery Horse Power, DHP = EHP / PC = 72,98 kW
2. Trust Horse Power, THP = EHP / ηhull = 31,20 kW
3. Shaft Horse Power, SHP = DHP / ηsηb = 75,23 kW, dengan asumsi efisiensi poros baling-baling 0,97
4. Brake Horse Power, dengan asumsi efisiensi gearbox 0,98
BHPscr = SHP / ηG = 76,76 kW
BHPmcr = BHPscr / 0,85 = 90,30 kW
Berdasarkan hasil analisa tersebut maka kebutuhan power untuk menggerakkan kapal dapat ditentukan yang sesuai spesifikasinya yaitu : CATERPILLAR (marine engine propulsion) Type : 3056 – LEHM0724
Power : 93 kW / 125 BHP Rpm : 2600
Stroke : 4 stroke – cycle diesel Starting: electric motor starting
G. Perancangan Sistem Instalasi dan Desain
Kapal Keruk TSD.
Sistem instalasi pipa dan posisi pompa
Berdasarkan pertimbangan luas area pengerukan dan akses transportasi menuju Pelabuhan Tanjung Emas Semarang maka ditentukan dimensi Kapal keruk TSD. LOA = 31,16 m Hull LOA = 22,60 m B = 7,70 m T = 1,00 m H = 2,15 m Vs (operation) = 3 knots/h V max (moving) = 8 knots/h
JURNAL TEKNIK SISTEM PERKAPALAN Vol. 1, No. 1 (2013) 1-7
III. KESIMPULAN
Setelah dilakukan pembahasan beberapa
rumusan masalah pada tugas akhir ini maka
ada beberapa kesimpulan yang mengacu pada
isi pembahasan tersebut adalah jenis sistem
permesinan yang dirancang pada kapal keruk
Trailing Suction Dredger ini adalah
1. Pompa hisap untuk pengerukan
2. Towing winch untuk mengangkat pipa
hisap
3. Mesin penggerak utama kapal
4. Desain lambung kapal
Dari beberapa pembahasan pokok tersebut
maka spesifikasi sistem permesinan yang
terdata diantaranya :
No Sistem permesinan Type /merk Spesifikasi
1 Horizontal slurry pump Slurry pump 300ZJ - A70 Cap. = 2333 m3/jam Head = 76,8 m Power = 630 kW Ø suction = 18 “ Ø discharge = 14,5”
2 Towing winch Jiangshu JM2A Rated pull = 20 kN Speed = 16,7 m/min Ø wire = 12,5 mm Roll cap. = 100 m Motor (power) = 7,5 kW (Y160M-6) 3 Mesin penggerak utama Caterpillar 3056– LEHM07244 4 Stroke Power = 93kW/ 125BHP rpm = 2600 4 Desain lambung kapal Catamaran LOA = 31,16 m Hull LOA = 22,60 T = 1,00 m H = 2,15 m Vs (operasional) = 3 knots/jam Vmax (moving) = 8 knots/jam.
IV. REFERENSI
1. Adji, S.W. Modul 1 Resistance & Propulsion (copyright 2009), Surabaya.
2. Bray, R.N. Bates, A.d. Land, J.M. 1997. Dredging, A Handbook for Engineers, Second Edition. London. Arnold.
3. Herbich, John B. 1992. Handbook of Dredging Engineering. McGraw-Hill-Inc. 4. Roorda, A. Vertregt, J.J. 1963. Floating
Dredges. Haarlem. De Technische Uitgeverij H. Stam N.V.
5. Turner, Thomas M. 1992. Fundamentals of Hydraulic Dredging, Second Edition. ASCE Press, Virginia.
6. Vlasblom, W.J. Dredging Book.
7. Slurry Pump Handbook – 2009 edisi ke 4. 8. www.dredging.org