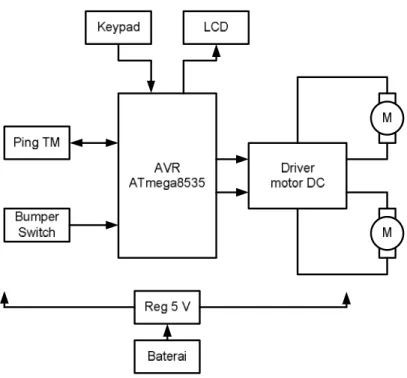
RANCANG BANGUN ROBOT MOBIL PENJEJAK BENDA BERGERAK BERBASIS PENGENDALI PD (Proposional-Derivative) MENGGUNAKAN MIKROKONTROLLER AVR ATmega8535
Teks penuh
Gambar

Dokumen terkait
Puji dan syukur penulis ucapkan kepada ALLAH SWT., yang telah memberikan rahmat dan karunia-NYA kepada penulis, sehingga penulis dapat menyelesaikan penulisan
Alat respirasi adalah alat atau bagian tubuh tempat 02 dapat berdifusi masuk dan sebaliknya C02 dapat berdifusi keluar. Alat respirasi pada hewan bervariasi antara
Semen portland merupakan bubuk halus yang diperoleh dengan menggiling klinker yang didapat dari pembakaran suatu campuran yang baik dan merata antara kapur dan bahan
Data harga pedet ini juga sama dengan harga di pasar hewan yang ada di daerah studi, jadi tidak bisa ditunmkan lagi dari harga tersebut dengan asumsi hasil demikian maka manajemen
Dan dengan cara meningkatkan karakter peserta didik melalui strategi penanaman nilai pendidikan karakter siswa berbasis multiple intelegensi, sehingga dalam internalisasi
Di Kalimantan Timur, salah satu daerah endemis malaria yang sebagian besar wilayahnya merupakan hutan hujan tropis, dengan karakteristik alam, penduduk, sosial
Suatu perkembangan lain dalam sejarah psikologi ialah yang dipelopori Sigmund Freud (1856-1939), seorang psikiater Austria, yang secara sistematis dan empiris telah menunjukkan
Peningkatan Kapasitas Dalam Bidang Panas Bumi Untuk Mendukung Pengembangan Panas Bumi Di Indonesia Hingga Tahun 2025 (Capacity Building in Geothermal for Supporting
